1. Introduction
A great many studies in applied mathematics and mathematical physics are concerned with multiphase flow in porous media. From a mathematical point of view, these studies are important because they feature intrinsically nonlinear equations and hysteresis. Nonlinearity and hysteresis are longstanding “hot topics” that continue to generate fundamental insights and progress in mathematics, physics and engineering.
The purpose and significance of this work is to report rigorous results based on nonlinear semigroup theory for a simplified one-dimensional mathematical model of immiscible two-phase flow with hysteresis in porous media. It exhibits strongly nonlinear and nonmonotone solutions as a result of hysteresis. Our simplified model is introduced here as the nonlinear initial and boundary value problem
where
is position,
is the domain,
is the time,
is the unknown saturation function of the wetting phase, and
is the initial saturation. The nonlinear term is defined as
with
with
and a fixed position
. The characteristic function
is defined as
for
and as
for
. Further,
denotes the derivative with respect to
t,
denotes the derivative with respect to
z, and
denotes the second derivative with respect to
z. We assume throughout this paper that
with
are twice continuously differentiable and
Furthermore, we assume that
D is a positive non-zero constant,
.
Many authors have discussed the existence and uniqueness of weak solutions for two-phase flow equations using different analytical approaches, see [
1,
2,
3,
4,
5]. The field is much too large to be reviewed here, and we thus restrict attention on the problem of nonmonotone solutions [
6,
7,
8]. Our objective in this paper differs from most other works, because we wish to apply nonlinear semigroup theory and fractional interpolation spaces to problem (
1) in the limit of small
. Presently, there exist several nonlinear semigroup approaches in the literature to prove the existence and uniqueness of solutions of elliptic–parabolic partial differential equations, see [
9,
10,
11,
12,
13,
14,
15]. The works of [
9,
10,
11,
12] addressed elliptic–parabolic problems in porous media.
However, for elliptic–parabolic partial differential equations, such as (
1), all analytical investigations known to us neglect hysteresis in
and assume
. Exceptions are [
13,
16], where a generalized Prandtl–Ishlinskii play operator and a Preisach hysteresis model are discussed. There, the hysteresis operators only affect the time derivative
and not the nonlinear function
f. Our method in this paper is based on the decoupling of hysteresis processes.
2. Methods
In this section, some basic methods and notations are recalled. Let
X be a Banach space and denote its norm by
. The space of bounded linear mappings
is denoted by
. The uniform operator norm in
is indicated by
. The norm in the Lebesgue space
is written as
. For
the norm on the fractional Sobolev spaces
will be denoted by
. The closure of the space of test functions
in
will be denoted by
. The space
, defined for
, denotes the Sobolev space with zero Neumann boundary conditions. The duality products of
and
are denoted by
. In the scope of this article, all Lebesgue and Sobolev spaces are defined on the domain
and from now are written without the domain
. For more details on the definitions, see ([
15], Chapter 1).
Definition 1. ([15], Chapter 1) Letand. Then, the spaceconsists of functionsfulfilling the following conditions: - 1.
The limitexists in X.
- 2.
The function h is Hölder continuous with exponent σ and weight function, i.e.,
Endowingwith the norma Banach space is obtained. Let
be a densely defined, closed linear operator with the resolvent set
and the spectrum
. We use the notation
for open sectors in the complex plane. The domain
, of the operator
A, is a Banach space equipped with the graph norm
.
- 1.
An operator A in a Banach space X is called sectorial, if and if there exists an angle and a constant such that If A is sectorial, the infimum of all such that Equation (7) holds is denoted by and is called the sectorial angle of A.
- 2.
A family of operators with , is called an analytic semigroup if it satisfies the following properties:
- (a)
The mapping is analytic in .
- (b)
For , the relation holds.
- (c)
holds, and the following strong convergence condition holds for all and :
- 3.
A sectorial operator A generates an analytic semigroup, and this semigroup is denoted by with .
We use the definition of fractional powers by the Dunford integral.
Definition 3. ([15], Chapter 2) For with one defineswhere the integral contour Υ lies in and surrounds counterclockwise excluding the negative real axis. The principal branch on is chosen for the analytic function . Clearly, is a one-to-one function for any . Then, the positive fractional powers are defined aswith domain where denotes the range. Lemma 1. ([15], Eqs. (2.129),(2.133)) Let A be a sectorial operator with angle and let with denote the analytic semigroup generated by . For all there exists a constant such that the inequalitieshold for all . Theorem 1. ([15], Chapter 2) Let and let . Then, for , the operatorin is sectorial with angle . For any , the operator fulfills Equations (
7a)
and (
7b)
, where the constant M is determined by Ω
, D and ω and depends on ϵ. Proof. This follows from Theorem 2.3, Theorem 2.7 and the discussion at the beginning of Chapter 2 in [
15]. □
3. Results
In the following, we prove the existence of local solutions in Theorem 3. We show that local solutions are global in Corollary 1. Finally, in Theorem 4, we prove that initial conditions with values in
lead to solutions with values in
. By “solutions”, we mean functions that belong to the space
defined in Theorem 3 below and that satisfy Equation (
15).
As remarked above, the notation
,
and
is used. In this section, the initial and boundary value problem (
1) is solved in the function space
. Problem (
1) is transformed into the abstract Cauchy problem
with the linear operator
defined by
with fixed
as in Theorem 1 and the nonlinear function
defined by
The domain
of the linear operator
A is given by
The domains of the fractional powers
of
A (or the interpolation spaces between
and
) are given by
see ([
15], Chapter 16). Therefore the domain of the nonlinear function
F is given as
Lemma 2. For bounded functions with bounded derivatives and where , , is bounded and measurable, and the nonlinear function withfulfills the inequalitiesfor all with and the operator A defined above in Equation (
16)
. Proof. The functions , and are bounded and measurable. Therefore, the nonlinear function F is continuous as a sum of continuous functions, and it maps every to .
For convenience the notations
and
are used. Then one obtains
for
. Let
N be the embedding constant
and define
for
. The embedding of
holds because
is one-dimensional. With these definitions, Equation (
23) is estimated as
which proves (
21). The verification of (
22) follows from (
21) by setting
. □
Theorem 2. Problem (
15)
with A given by (
16)
and given by (
17)
is well-defined for all -valued functions that satisfy Proof. First, A is an operator . Second, the time derivative is an operator . According to Lemma 2 F is a mapping . This implies that it is also a mapping . □
Theorem 3. Define the linear operator as in Theorem 1 and the nonlinear function as in Lemma 2. There exists a , such that, for every , there exists a unique local solution u of problem (
1)
in the function spaceFurther, if , then this solution belongs to the space Remark 1. The definition of explains the solution concept: The factor ensures that the solutions u possess a strong derivative with respect to time, considered as -valued functions on . The factor ensures that the solutions u belong to the domain of A for . The factor ensures that with respect to the topology of . These solutions are solutions in the weak sense, in particular.
Proof. Following [
15], the idea of the proof is to rewrite problem (
15) as
To this end, the fixed-point theorem is applied to the mapping
M
which is defined on the space
defined in Equation (
31) and seen to be a contraction on a suitably chosen closed subset
with
. The first step is to determine
and to verify the requirements for the fixed point theorem ([
17], Theorem 1.A, p. 17). In the second step, it is shown that, if
u is a fixed point of the mapping
M, then, for every
, the function
is an element of the space
. If
, then
is an admissible inhomogeneity for the Cauchy problem (
29). Finally, the uniqueness of the solution is shown.
Using Equations (
16) and (
17), the initial and boundary value problem (
1) is transformed into an abstract Cauchy problem (
15).
The linear operator
A, defined in (
16), is a sectorial operator with angle
by virtue of Theorem 1 and the infinitesimal generator of the analytic semigroup
.
Step 1: Requirements for the fixed-point theorem. For every
, the Banach Space
is defined as
with norm
Additionally, one defines the closed subset
of all
u that satisfy
Now, we derive conditions for the constants
and
T from Equation (
32) such that the mapping
M from Equation (
30) maps
into
. For any
and
, one derives the estimate
Using Lemma 1, Equation (
22) from Lemma 2 and Equation (
32), we find
For
, Equation (
32) holds if the right side of Equation (
34) is smaller or equal to
and
If
or equivalently
holds, then
can be chosen such that
The right hand side of (
37) is bounded because the norm
is bounded according to ([
15], Proposition 2.5, p.86). Then, the mapping
M fulfills the condition
where
is given by (
37), and
holds.
The next step is to show that
is a contraction mapping. One estimates
Using Lemma 2 and Equation (
25) to estimate the integral term, one obtains
Thus, the mapping
is a contraction if
or equivalently
It remains to prove that
holds. For this purpose, one calculates for
With Equation (
42), one obtains
Then, Equations (
12), (
22), (
32) and (
34) lead to
Equation (
44) shows that
is now part of the function space
. The estimate
shows that
and therefore
is part of
.
If Equations (
36), (
37) and (
41) are fulfilled, then a fixed point
exists according to ([
17], Theorem 1.A, p. 17), and the fixed point
obeys
Step 2: Show that holds for any fixed point u of M. It is immediate from the definition of
and Lemma 2 that
is a continuous function on
. The function
has to fulfill condition (4) from Definition 1. Using Equations (
21), (
38) and (
44), one obtains, for
, the estimate
Therefore, we can conclude that
is true, and we can write the semilinear evolution problem (
15) as a linear evolution problem (
29).
Using ([
15], Theorems 3.4, 3.5, p. 124, 126), it follows that the fixed points
u (see Equation (
47)) are elements of the function space
from (
27). Further, it follows that
u belongs to the function space
from Equation (
28) if
.
Step 3: Uniqueness of solutions. Any solution
of problem (4.1) satisfies
and is a solution of the problem (4.15) with
in the sense of ([
15], Theorem 3.4). According to ([
15], Theorem 3.4, Eq. (3.13)), any solution
of (
29) is also a fixed point of
M. Therefore, uniqueness follows from the fixed point theorem ([
17], Theorem 1.A, p. 17). □
Corollary 1. Every local solution of problem (
1)
, in the sense of Theorem 3, extends uniquely to a global solution. Proof. Because the constant in Theorem 3 is independent of the initial condition the theorem can be applied repeatedly to prove the existence of a solution that is piecewise differentiable as a function with values in . Invoking uniqueness, piecewise differentiability improves to differentiability for all as a function with values in , that is, one obtains . □
Theorem 4. Let and be the unique global solution of problem (
1)
. If the initial condition fulfills , then the global solution u fulfills as well. Proof. First, the lower bound
is discussed by using a penalty function
which is continuously differentiable and whose first derivative satisfies the general Lipschitz condition. The function
averages the value of the penalty function over the domain
. In Equation (
50), it holds that
and
. The domain
denotes the time-dependent domain where
holds and
denotes the time-dependent domain where
holds. Clearly,
is a continuously differentiable function for
because
with the derivative
where
and
. Since
for any
and
for any
, it holds that
Thus, we find , and implies , i.e., for .
Similarly, we can easily prove that
for every
by taking
on
and formulating problem (
1) as follows
with
,
and
□
4. Discussion
In the following discussion, the above results for Equation (
1) are interpreted from the perspective of previous studies. Hysteretic two-phase flow in porous media was previously modeled using the initial and boundary value problem [
8]
with the nonlinear fractional flow functions
and the capillary coefficient
. Problem (
55) becomes equivalent to Equation (
1) for
where the derivative is a distributional derivative. The fractional flow function is indexed by a graph
, see ([
8], Equation (
9)). The graph
represents different flow processes obtained from a suitable hysteresis model. At a fixed
z, this depends on the saturation history
at
z. Let the time instants
with
and
denote the switching times between drainage and imbibition at
z. The graph
changes only at these switching instants.
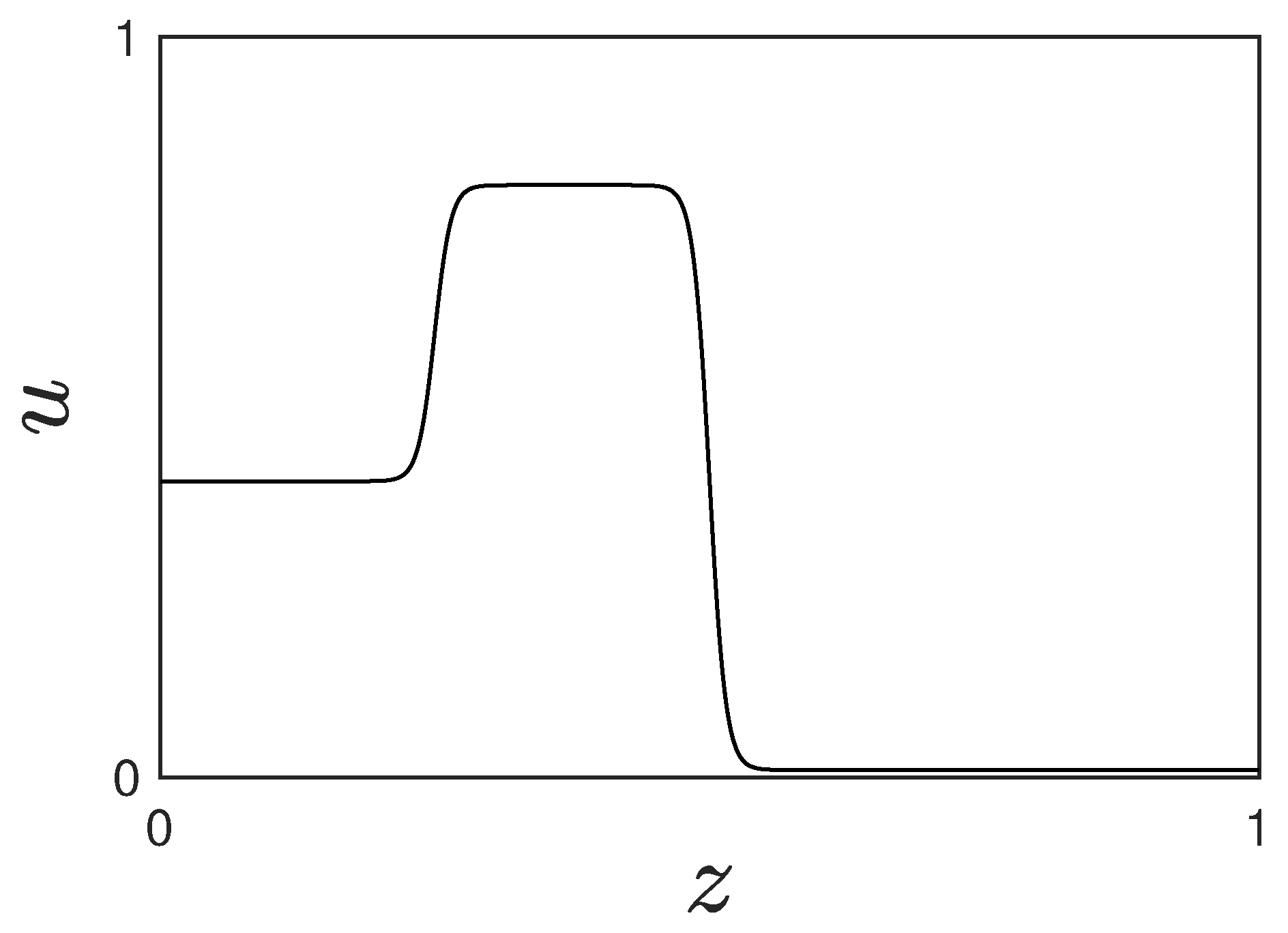
Consider the initial-boundary value problem for Equation (
55) with a non-monotone initial condition as shown in
Figure 1. Assume without loss of generality, that the profile propagates in the positive
z-direction. Let
with
be the saturation profile at time
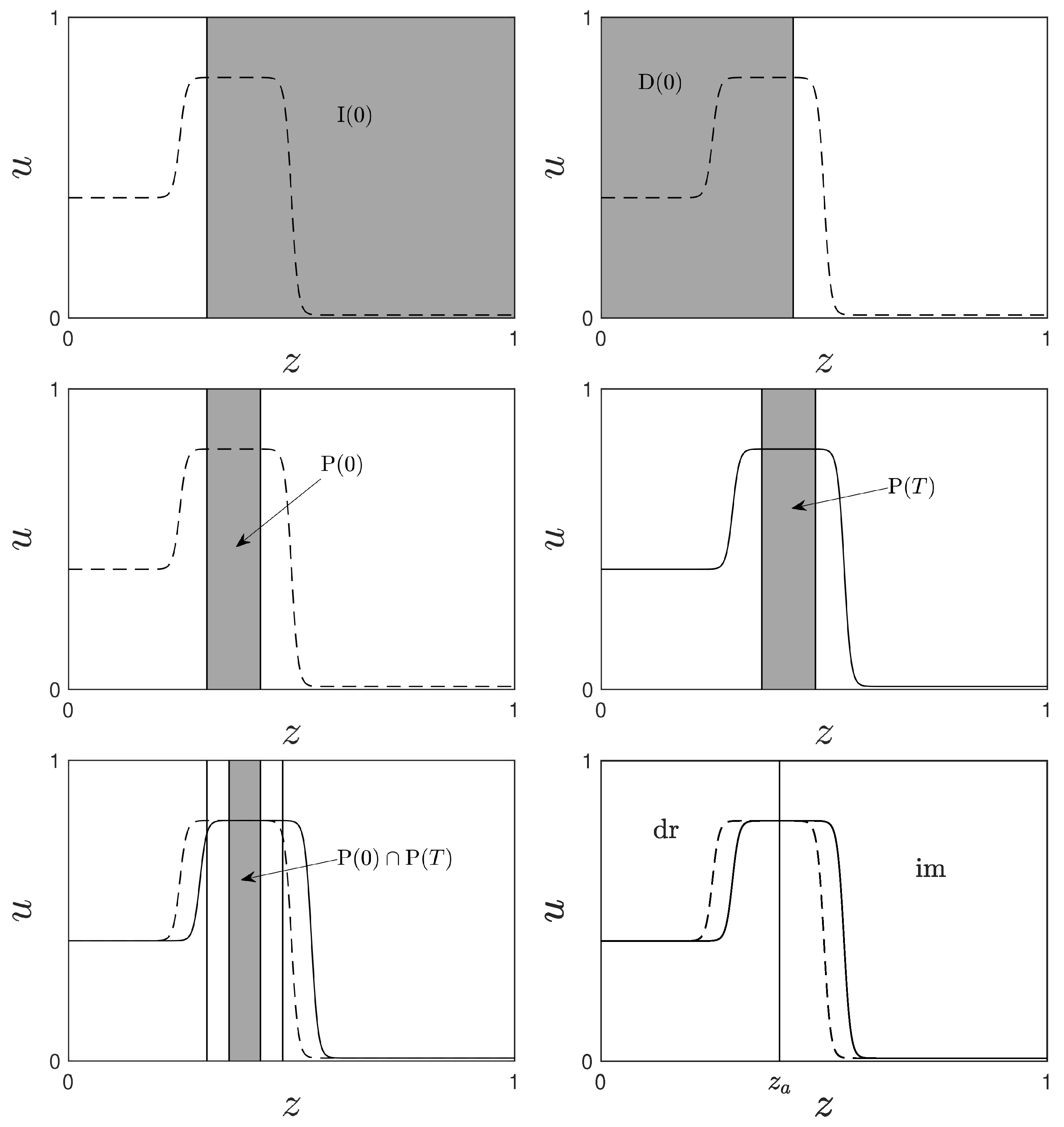
t. Then the imbibition interval
at time
t is defined as the largest singly connected interval on which
is monotone decreasing but not constant everywhere. Similarly, the drainage interval
at time
t is defined as the largest singly connected interval on which
is monotone increasing but not constant everywhere. For the initial saturation profile of
Figure 1 at time
, the two intervals are illustrated as gray regions in the top row of
Figure 2. Additionally, a time-dependent plateau interval is defined as
is illustrated as the gray region in the left graph of the second row in
Figure 2. The propagated plateau interval
for
is depicted in the second row on the right. Throughout
Figure 2, the initial condition
is plotted as a dashed line, and the propagated profile
with
is shown as a solid line. Because
, a position
can be selected such that the drainage process on the left (
) decouples from the imbibition process on the right (
).
Numerical solutions for problem (
55) with initial data as shown in
Figure 1 were studied in [
6,
7,
8]. For this simple class of processes with a single saturation overshoot, the saturation history at positions
has length
, while
for
. For any time
t with
, there is a fixed graph
describing the flow process at each
in terms of a flow function
parametrized by the saturation value
at
. Furthermore, there is a fixed graph
describing the flow process at each
in terms of a flow function
parametrized by the saturation value
at the time instant
when the flow process switched from imbibition to drainage. For a single overshoot, the value of
is, of course,
. By continuity of the hysteresis model and by continuity of the graph
, the flux is continous for all
with
. In this situation, the first order term in Equation (
55) simplifies to
where
and
. A possible choice for
can be seen in ([
8], Equation (
2)). The term
is necessary because the imbibition interval and drainage interval are overlapping in the plateau interval
. Inserting this into the differential Equation (
55) gives
where
is the initial condition and
is the saturation at position
z at the switching time
. The fractional flow functions for imbibition and drainage at the switching point obey flux continuity at
, i.e.
for all
. Note that the fractional flow functions are explicitly position dependent due to hysteresis.
Numerical (and experimental) evidence in [
6,
7,
8] suggest that imbibition and drainage fronts decouple for the simple class of hysteretic processes with a single saturation overshoot assumed in our mathematical model. The decoupling assumption is supported by noting that, for
, piecewise constant functions are indeed weak solutions.
The decoupling is implemented here in this work by assuming that the set
has positive measure for some nonempty time interval
with
. If the decoupling assumption holds true, then the fractional flow functions
agree for all
. In this way, a plateau in the saturation determines two position-independent fractional flow functions that agree on
for
. The rigorous results for problem (
1) obtained in this work support the numerical results for problem (
55) in [
8]. The main point here is that, given a non-monotone single overshoot initial condition similar to the one shown in
Figure 1, there is an open interval
with
for
and
. This fact ensures the decoupling of the imbibition and the drainage front, and Equation (
55) can be reduced to Equation (
1) for
.

{kind=link}
{kind=link}

