
Exact Solutions of Nonlinear Partial Differential Equations via the New Double Integral Transform Combined with Iterative Method




Abstract
:1. Introduction
2. Basic Definitions and Theorems
2.1. Fundamental Properties of the DLST
2.2. Existence and Uniqueness Conditions for the DLST
2.3. Properties of Derivatives
3. Principle of the DLST-Iterative (DLST-I) Method
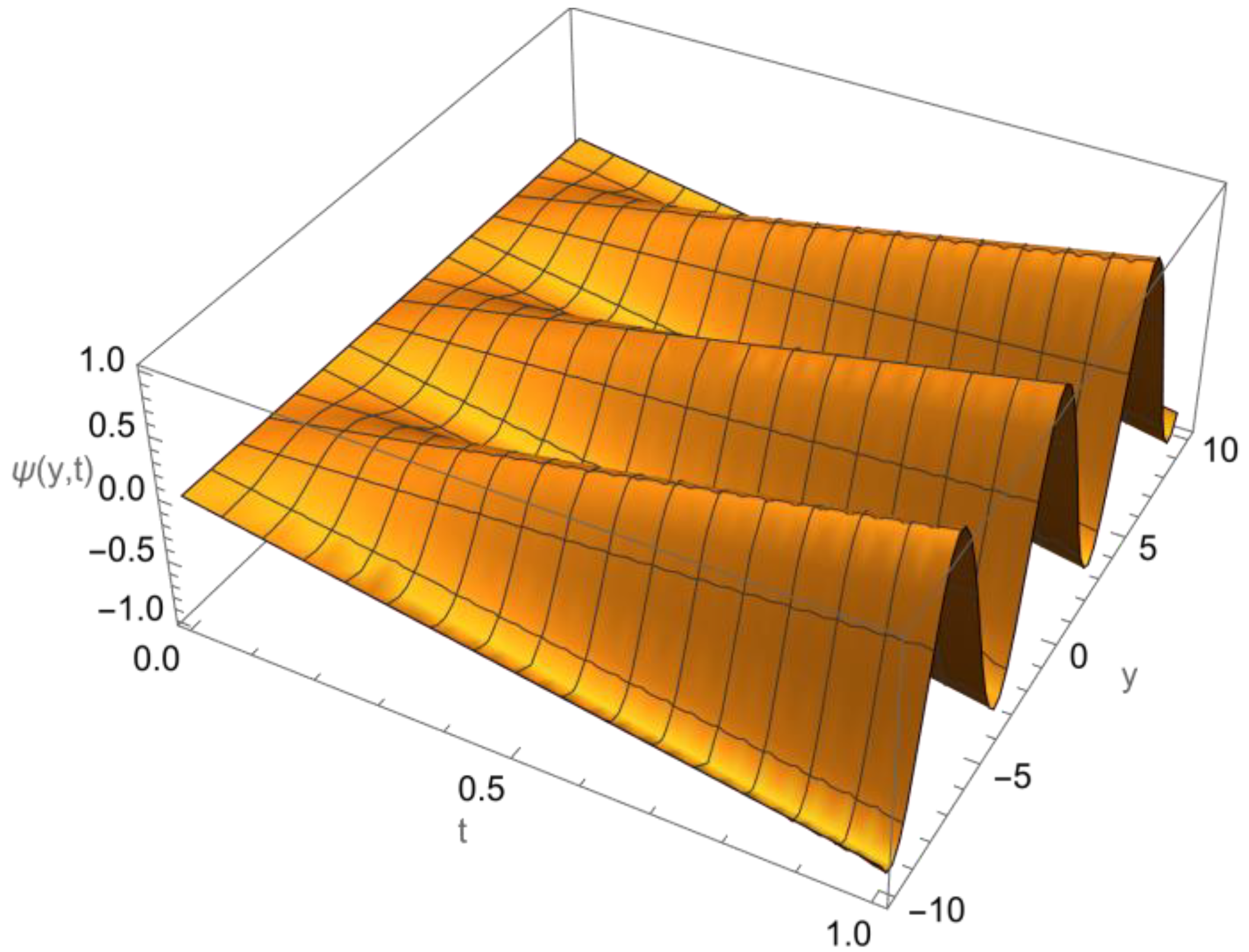
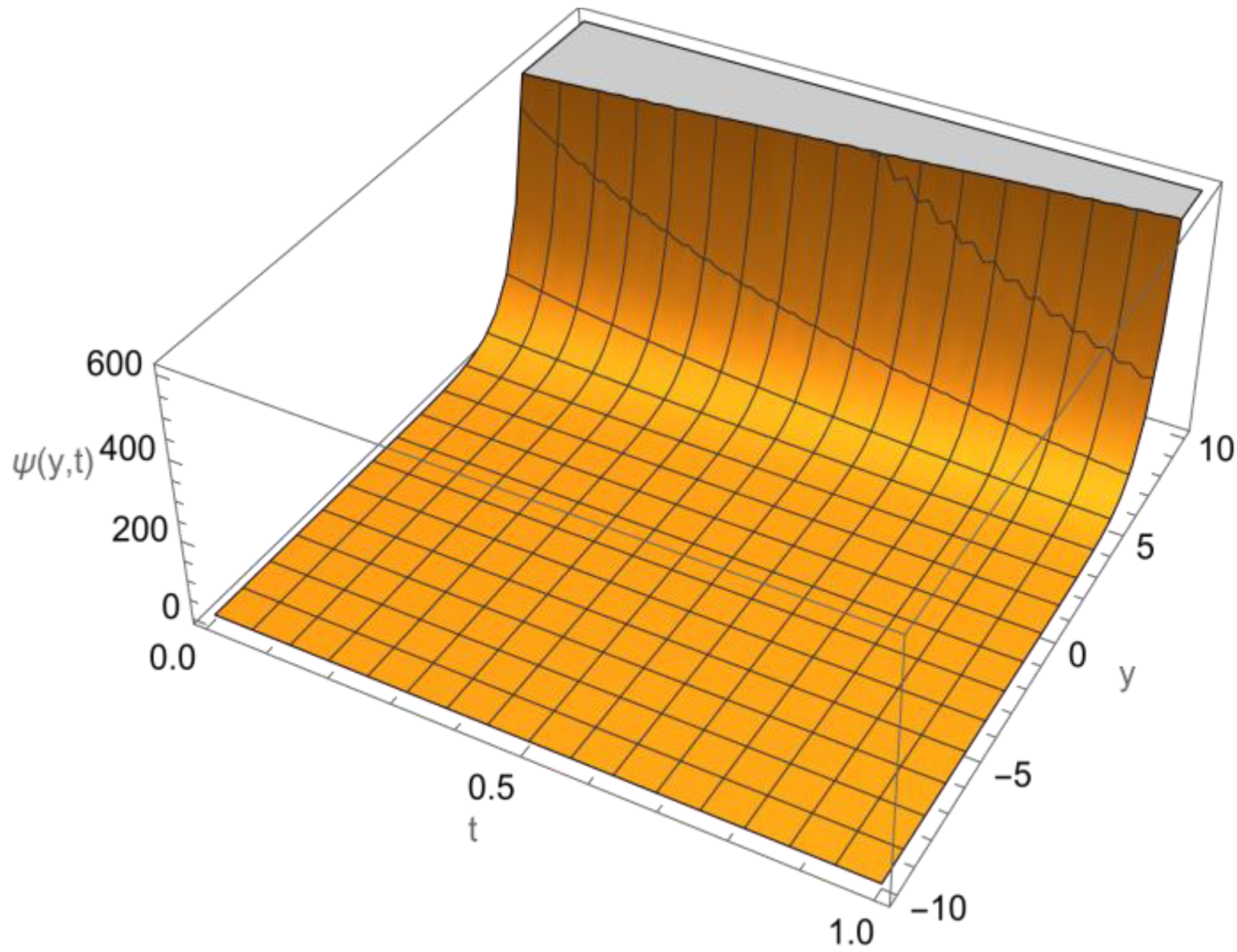
4. Elucidative Examples
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Adomian, G. A review of the decomposition method and some recent results for nonlinear equations. Math. Comput. Model. 1990, 13, 17–43. [Google Scholar] [CrossRef]
- Adomian, G. Nonlinear dissipative wave equations. Appl. Math. Lett. 1998, 11, 125–126. [Google Scholar] [CrossRef] [Green Version]
- Kaya, D. A new approach to solve a nonlinear wave equation. Bull. Malays. Math. Soc. 1998, 21, 95–100. [Google Scholar]
- Kaya, D.; Inc, M. On the solution of the nonlinear wave equation by the decomposition method. Bull. Malays. Math. Soc. 1999, 22, 151–155. [Google Scholar]
- Kaya, D.; Aassila, M. An application for a generalized KdV equation by the decomposition method. Phys. Lett. A 2002, 299, 201–206. [Google Scholar] [CrossRef]
- Kaya, D. An explicit and numerical solutions of some fifth-order KdV equation by decomposition method. Appl. Math. Comput. 2003, 144, 353–363. [Google Scholar] [CrossRef]
- Pamuk, S. Solution of the porous media equation by Adomian’s decomposition method. Phys. Lett. A 2005, 344, 184–188. [Google Scholar] [CrossRef]
- Wazwaz, A.M. The variational iteration method: A reliable analytic tool for solving linear and nonlinear wave equations. Comput. Math. Appl. 2007, 54, 926–932. [Google Scholar] [CrossRef] [Green Version]
- Wazwaz, A.M. The variational iteration method: A powerful scheme for handling linear and nonlinear diffusion equations. Comput. Math. Appl. 2007, 54, 933–939. [Google Scholar] [CrossRef] [Green Version]
- Rafei, M.; Ganji, D.D. Explicit solutions of Helmholtz equation and fifth-order KdV equation using homotopy perturbation method. Int. J. Nonlinear Sci. Numer. Simul. 2006, 7, 321–329. [Google Scholar] [CrossRef]
- Keskin, Y.; Oturanc, G. Reduced differential transform method for solving linear and nonlinear wave equations. Iran. J. Sci. Technol. Trans. A 2010, 34, 113–122. [Google Scholar]
- Keskin, Y.; Oturanc, G. Reduced differential transform method for generalized KdV equations. Math. Comput. Appl. 2010, 15, 382–393. [Google Scholar] [CrossRef] [Green Version]
- Jajarmi, A.; Baleanu, D.; Zarghami Vahid, K.; Mobayen, S. A general fractional formulation and tracking control for immunogenic tumor dynamics. Math. Methods Appl. Sci. 2022, 45, 667–680. [Google Scholar] [CrossRef]
- Khater, M. Diverse bistable dark novel explicit wave solutions of cubic–quintic nonlinear Helmholtz model. Mod. Phys. Lett. B 2021, 35, 2150441. [Google Scholar] [CrossRef]
- Saadeh, R. Numerical algorithm to solve a coupled system of fractional order using a novel reproducing kernel method. Alex. Eng. J. 2021, 60, 4583–4591. [Google Scholar] [CrossRef]
- Saadeh, R.; Ghazal, B. A new approach on transforms: Formable integral transform and its applications. Axioms 2021, 10, 332. [Google Scholar] [CrossRef]
- Khater, M.; Lu, D. Analytical versus numerical solutions of the nonlinear fractional time–space telegraph equation. Mod. Phys. Lett. B 2021, 35, 2150372. [Google Scholar] [CrossRef]
- Erturk, V.S.; Godwe, E.; Baleanu, D.; Kumare, P.; Asadf, J.; Jajarmig, A. Novel fractional-order Lagrangian to describe motion of beam on nanowire. Acta Phys. Pol. A 2021, 140, 265–272. [Google Scholar] [CrossRef]
- Qazza, A.; Burqan, A.; Saadeh, R. A new attractive method in solving families of fractional differential equations by a new transform. Mathematics 2021, 9, 3039. [Google Scholar] [CrossRef]
- Burqan, A.; Saadeh, R.; Qazza, A. A novel numerical approach in solving fractional neutral pantograph equations via the ARA integral transform. Symmetry 2022, 14, 50. [Google Scholar] [CrossRef]
- Baleanu, D.; Ghassabzade, F.; Nieto, J.J.; Jajarmi, A. On a new and generalized fractional model for a real cholera outbreak. Alex. Eng. J. 2022, 61, 9175–9186. [Google Scholar] [CrossRef]
- Khater, M.A. Diverse solitary and Jacobian solutions in a continually laminated fluid with respect to shear flows through the Ostrovsky equation. Mod. Phys. Lett. B 2021, 35, 2150220. [Google Scholar] [CrossRef]
- Sakamoto, K.; Yamamoto, M. Initial value boundary value problems for fractional diffusion wave equations and applications to some inverse problems. J. Math. Anal. Appl. 2011, 382, 426–447. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, S.; Elzaki, T.; Elbadri, M.; Mohamed, M.Z. Solution of partial differential equations by new double integral transform (Laplace-Sumudu transform). Ain Shams Eng. J. 2021, 12, 4045–4049. [Google Scholar] [CrossRef]
- Ahmed, S.; Elzaki, T.; Hassan, A.A. Solution of integral differential equations by new double integral transform (Laplace-Sumudu transform). J. Abstr. Appl. Anal. 2020, 2020, 4725150. [Google Scholar] [CrossRef]
- Ahmed, S. Applications of new double integral transform (Laplace-Sumudu transform) in mathematical physics. J. Abstr. Appl. Anal. 2021, 2021, 6625247. [Google Scholar] [CrossRef]
- Elzaki, T.; Ahmed, S.; Areshi, M.; Chamekh, M. Fractional partial differential equations and novel double integral transform. J. King Saud Univ. Sci. 2022, 34, 101832. [Google Scholar] [CrossRef]
- Baleanu, D.; Hassan Abadi, M.; Jajarmi, A.; Zarghami Vahid, K.; Nieto, J.J. A new comparative study on the general fractional model of COVID-19 with isolation and quarantine effects. Alex. Eng. J. 2022, 61, 4779–4791. [Google Scholar] [CrossRef]
- Khater, M.A. Abundant breather and semi-analytical investigation: On high-frequency waves’ dynamics in the relaxation medium. Mod. Phys. Lett. B 2021, 35, 2150372. [Google Scholar] [CrossRef]
- Mishra, H.K.; Nagar, A.K. He-Laplace method for linear and nonlinear partial differential equations. J. Appl. Math. 2012, 2012, 180315. [Google Scholar]
- Hamza, A.E.; Elzaki, T. Application of homotopy perturbation and Sumudu Transform Method for Solving Burgers Equations. Am. J. Theor. Appl. Stat. 2015, 4, 480–483. [Google Scholar] [CrossRef] [Green Version]
- Hilal, E.; Elzaki, T. Solution of nonlinear partial differential equations by new Laplace variational iteration method. J. Funct. Spaces 2014, 2014, 790714. [Google Scholar] [CrossRef]
- Khater, M.A. Abundant wave solutions of the perturbed Gerdjikov–Ivanov equation in telecommunication industry. Mod. Phys. B 2021, 35, 2150456. [Google Scholar] [CrossRef]
- Jajarmi, A.; Baleanu, D.; Zarghami Vahid, K.; Mohammadi Pirouz, H.; Asad, J.H. A new and general fractional Lagrangian approach: A capacitor microphone case study. Results Phys. 2021, 31, 104950. [Google Scholar] [CrossRef]
- Khan, Y.; Wu, Q. Homotopy perturbation transform method for nonlinear equations using He’s polynomials. Comput. Math. Appl. 2011, 61, 1963–1967. [Google Scholar] [CrossRef] [Green Version]
- Eltayeb, H.; Kilicman, A. A note on double Laplace transform and telegraphic equations. Abstr. Appl. Anal. 2013, 2013, 932578. [Google Scholar] [CrossRef]
- Dhunde, R.R.; Waghamare, G.L. Double Laplace iterative method for solving nonlinear partial differential equations. New Trends Math. Sci. 2019, 7, 138–149. [Google Scholar] [CrossRef]
- Eltayeb, H. A note on double Laplace decomposition method and nonlinear partial differential equations. New Trends Math. Sci. 2017, 5, 156–164. [Google Scholar] [CrossRef]
- Gejji, V.D.; Jafari, H. An iterative method for solving nonlinear functional equations. J. Math. Anal. Appl. 2006, 316, 753–763. [Google Scholar] [CrossRef] [Green Version]
- Ali, L.; Islam, S.; Gul, T.; Amiri, I.S. Solution of nonlinear problems by a new analytical technique using Daftardar-Gejji and Jafari polynomials. Adv. Mech. Eng. 2019, 11, 1687814019896962. [Google Scholar] [CrossRef] [Green Version]
- AL-Jawary, M.A.; Radhi, G.H.; Ravnik, J. Daftardar—Jafari method for solving nonlinear thin film flow problem. Arab. J. Basic Appl. Sci. 2018, 25, 20–27. [Google Scholar] [CrossRef]
- AL-Jawary, M.A. Analytic solutions for solving fourth-order parabolic partial differential equations with variable coefficients. Int. J. Adv. Sci. Tech. Res. 2015, 3, 531–535. [Google Scholar]
- Al-luhaibi, M.S. New iterative method for fractional gas dynamics and coupled Burger’s equations. Sci. World J. 2015, 2015, 153124. [Google Scholar] [CrossRef] [PubMed]
- Dhunde, R.R.; Waghamare, G.L. Double Laplace transform combined with iterative method for solving non-linear telegraph equation. J. Indian Math. Soc. 2016, 83, 221–230. [Google Scholar]
- Dhunde, R.R.; Waghamare, G.L. Analytical solution of the nonlinear Klein-Gordon equation using double Laplace transform and iterative method. Am. J. Comput. Appl. Math. 2016, 6, 195–201. [Google Scholar]
- Wazwaz, A.M. Partial Differential Equations and Solitary Wave’s Theory; Springer: New York, NY, USA; NDordrecht, The Netherlands; Berlin/Heidelberg, Germany, 2009. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ahmed, S.A.; Qazza, A.; Saadeh, R. Exact Solutions of Nonlinear Partial Differential Equations via the New Double Integral Transform Combined with Iterative Method. Axioms 2022, 11, 247. https://doi.org/10.3390/axioms11060247
Ahmed SA, Qazza A, Saadeh R. Exact Solutions of Nonlinear Partial Differential Equations via the New Double Integral Transform Combined with Iterative Method. Axioms. 2022; 11(6):247. https://doi.org/10.3390/axioms11060247
Chicago/Turabian StyleAhmed, Shams A., Ahmad Qazza, and Rania Saadeh. 2022. "Exact Solutions of Nonlinear Partial Differential Equations via the New Double Integral Transform Combined with Iterative Method" Axioms 11, no. 6: 247. https://doi.org/10.3390/axioms11060247