1. Introduction
Extensivity of an entropy is expressed as
S being proportional to the number
N of elements of the system. The hypervolume
of the phase space of a system composed by independent subsystems increases with the product of the hypervolumes
of the corresponding subspaces of its elements (
). For identical and independent subsystems, the phase space exponentially increases with the number of elements,
, and thus the Boltzmann entropy is proportional to
N:
, i.e., it is extensive. Correlations between subsystems make the hypervolume of the phase space smaller than that of the product of the hypervolumes of its subsystems, and particular kinds of strong correlations make the phase space asymptotically increase as a power law, at a much slower rate than the exponential law; in these cases the Boltzmann entropy is no longer extensive. For such special cases, —and there are plenty of observational, experimental, and numerical examples— the nonadditive entropy
[
1] becomes proportional to
N, recovering extensivity, which is a central property for connecting with thermodynamics (see details and further implications of extensivity in Ref. [
2]). The mathematical property that plays this role is a generalized multiplication operator defined in Ref. [
3]. The present paper identifies four classes of generalized algebras associated with the nonextensive formalism in a broader point of view. One of them contains the above-mentioned generalized multiplication. These developments hopefully help to understand the underlying mathematical structures that support the nonextensive statistical mechanics.
The Tsallis nonadditive entropy
has induced investigations on deformed mathematical structures aiming to represent relations of the nonextensive framework through expressions formally similar to the standard Boltzmann-Gibbs (BG) statistical mechanics. The definition of the generalized logarithm function (the
q-logarithm) [
4]
allowed to rewrite
(in its discrete version) as
(sum over
W microstates, each one labeled
i, with their corresponding probabilities
,
k is a positive constant,
is the generalizing entropic index). Ordinary formalism is recovered as
(
;
), equiprobability yields
. The
q-logarithm presents the limiting cases
Its inverse, the
q-exponential, is
(
is the Heaviside step function) that is more compactly written as
, with the symbol
,—the subscript symbol + encompasses the Heaviside function. The Heaviside step function
defines the cutoff condition: the
q-exponential is set to zero for
and
, and diverges for
and
. In the following we use either notations
or
, equivalently. Some properties of
q-logarithm and
q-exponential functions may be found in [
2,
5,
6,
7].
The
q-logarithm of a product splits into a nonadditive form for
:
This property triggered the definition of new generalized arithmetic operators: (
i) what if the right hand side (r.h.s.) of this expression is viewed as the definition of a generalized addition of
q-logarithms? Answer: Equation (
4) of [
3], Equation (
7) of [
8], Equation (
25) of the present work. (
ii) What should be the argument of the
q-logarithm of the left hand side (l.h.s.) of (
6) if its r.h.s. were an ordinary addition, instead of the generalized addition just defined? Answer: Equation (
7) of [
3], Equation (8) of [
8], Equation (48) of the present work. Since then, these operators have usually been referred to as
q-addition and
q-multiplication, or, more colloquially,
q-sum and
q-product. This
q-multiplication is the one that makes
extensive, as mentioned previously, and it is not distributive with respect to the
q-addition, and Nivanen et al. [
8] identified additional deformed operators, recovering the distributivity [their Equations (24)–(28)]. In an extension of that work by the same authors with collaborators [
9], the
q-multiplication and the
q-addition were identified as belonging to two different classes, and further operators were defined.
Examples of mathematical developments along these lines include: spiral generalizations of the trigonometric and hyperbolic functions through the extension of Euler’s formula to the complex domain [
10], generalization of derivative operators [
3,
11], generalizations of Fourier transforms, representations of the Dirac delta function [
12,
13], two parameter extensions for the logarithm and exponential and their related algebras [
14,
15] etc. Other deformed mathematical structures were introduced, particularly the Kaniadakis formalism [
16,
17,
18,
19], from which some of the developments within the nonextensive context have been inspired. Generalization of algebras has been recently proposed [
20], conforming to the group entropy theory [
21].
Examples of physical systems described by nonextensive statistical mechanics include: anomalous diffusion of cold atoms in dissipative optical lattices [
22], anomalous diffusion in granular matter [
23], experimental high energy physics [
24], and observational high energy physics in cosmic rays [
25]. An up-to-date bibliography may be found at the site [
26].
The present paper revisits generalized algebras and calculus motivated by the nonextensive formalism in a broader point of view. It identifies the basic arithmetic operators for four complementary classes, and defines a pair of linear/nonlinear derivative for each one. A connection with entropic functionals is established. The starting point is the definition of the generalized numbers.
The paper is organized as follows.
Section 2 introduces four deformed numbers, by combining the pair of the inverse logarithm/exponential functions and their generalized forms.
Section 3 explores each class of deformed arithmetics, derived from the generalized numbers.
Section 4 is dedicated to the deformed calculus emerged from the infinitesimal deformed differences. Two possibilities are focused: a linear and a nonlinear deformed derivative. A connection between these structures with entropic functionals is addressed in
Section 5. Particularly, the nonadditive entropy
is alternatively obtained through a procedure that uses one of the generalized powers defined in
Section 3.
Section 6 draws our final remarks and points towards new perspectives. Throughout the text, many expressions use symbols designed for compactness. Some of them appear in their explicit forms in the
Appendix A.
2. Deformed -Numbers
One fundamental mathematical object deserves a special attention within the present context, namely, the very concept of number. This was implicitly advanced within the nonextensive formalism in Ref. [
10], through the variable
(
) used in the generalization of Euler’s formula, that may be read as a complex generalized number [see Equation (
22) of [
10], Equation (
10a) of the present work]. Deformed numerical sets (
q-natural
,
q-integer
,
q-rational
,
q-real
numbers) were considered following Peano-like axioms and generalized arithmetic operators were consistently defined [
27]. Those generalized numbers are a transformation of the so-called
Q-analog of n—
Q standing for quantum, within the context of quantum calculus (we write it with upper case
Q to avoid confusion with the present lower case index
q) [
28]:
from which we borrow the idea of a
q-number. This connection had been previously realized, see [
29]. Deformation of reals had also been reported in Ref. [
30].
Given a continuous, analytical, monotonous, invertible function
generalized through a real parameter
q that recovers the ordinary case as a limiting procedure (in this context,
), we introduce the generalized numbers through four combinations, such as the ordinary case identically recovered:
The adopted notation obeys the following criteria: the square brackets are used when
(or
) is the argument of
f (or
) and the curly brackets are used when
(or
f) is the argument of
(or
); the function labeled as
f is arbitrary. The deformation parameter
q is used as a subscripted
postfix if the
inner function is deformed, referred to as i-number, Equations (
8a) and (8c), and as a subscripted
prefix if the
outer function is deformed, referred to as o-number, Equations (8b) and (8d) (in analogy with the notation employed for the generalized hypergeometric series—in that case, prefix for the numerator, postfix for the denominator).
The pair of i/o numbers are inverse of each other, and thus
To be more specific to the case we are focusing upon, we define
, and, consequently,
. It follows the le-numbers (l stands for logarithm and e stands for exponential, ‘le’ expresses the order in which the functions are taken)
and the el-numbers
Equation (11) is constrained to
. This limitation can be overcome, allowing
, in analogy to what was done in Ref. [
31], by ad hoc redefining the el-numbers as
with
and
. The present work uses the el-numbers as defined by Equation (12), but expressions are easily rewritten in its simpler form (11) by taking into consideration the restricted domain.
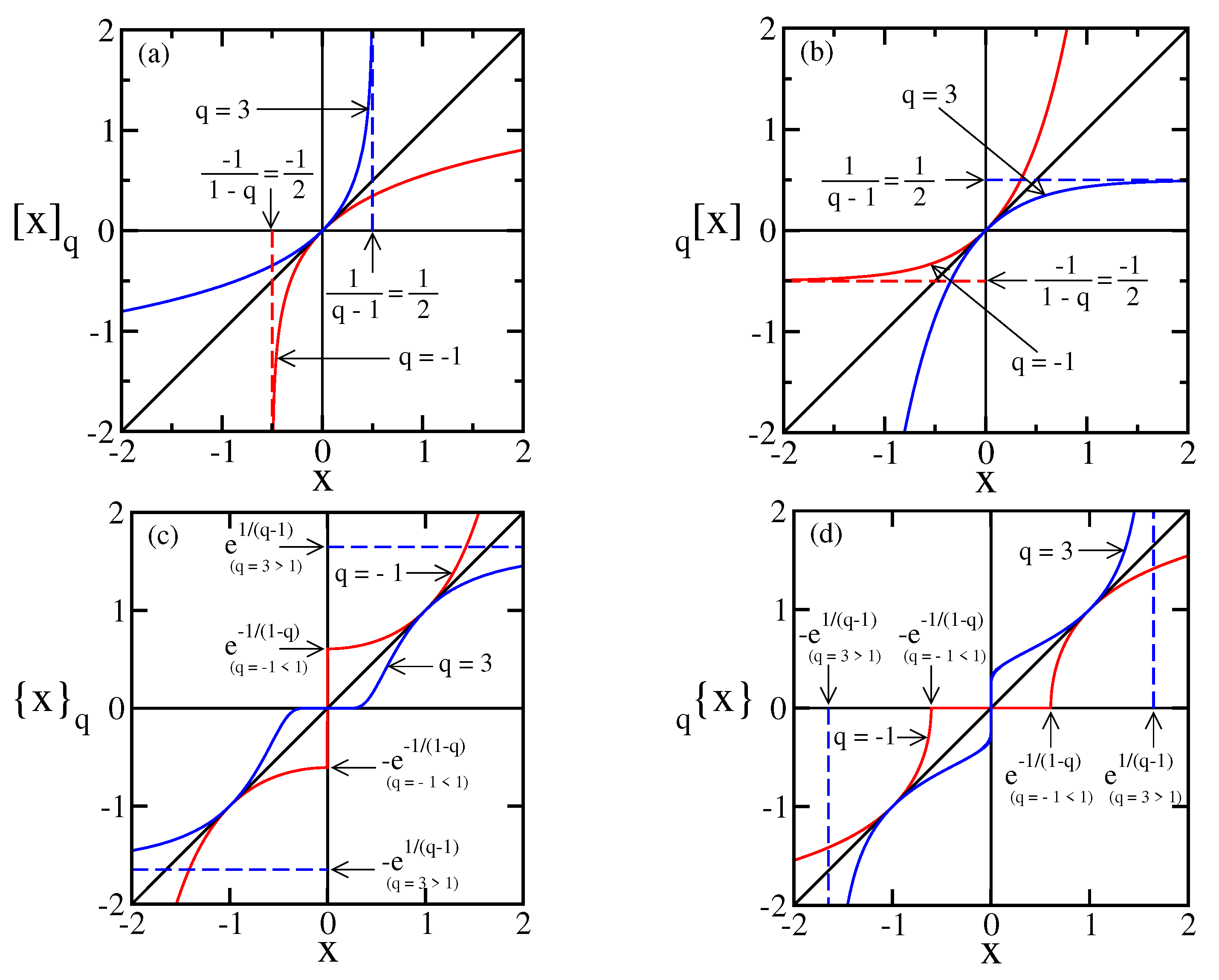
The le-numbers have one fixed point (
) at
, and
(ile and ole, respectively) for all values of
. The iel-numbers have two fixed points (
) for
, at
,—zero is not a fixed point for iel-numbers, since
(
,
)—, and three fixed points for
, at
and
. The oel-numbers have three fixed points, at
, and
. Due to the cutoff condition of the
q-exponential,
, and due to the absolute values, the el-numbers are odd, for both i and o deformed numbers (
). le-numbers and el-numbers are monotonous crescent with the ordinary numbers, i.e., if
,
and
for both i and o deformed numbers. An exception may apply for the oel-numbers: it may happen
but
for
within the cutoff region,
and
. The inverse relations between ile/ole and iel/oel numbers expressed by Equation (
9) are valid outside the cutoff regions.
Figure 1 illustrates the four
q-numbers. These deformed numbers also satisfy the identities
Whenever convenient and not ambiguous, for the sake of compactness of notation, we henceforth may occasionally use the symbols to denote the i-numbers (either or ), and to denote the o-numbers (either or ), and the most general case , without subscripts, to denote any of the four generalized numbers (not to be confound with mean value or the bra-ket symbols). The expressions ‘generalized number’ and ‘generalized variable’ are used interchangeably, just as the convenience of the context, without restricting ourselves to the rigorous mathematical distinction these concepts may have.
The following sections explore the connections of these deformed numbers with their corresponding arithmetics and calculus.
3. Deformed -Arithmetics
Starting from the generalized numbers (10) and (12) we identify four generalized classes of arithmetics. In this paper, the designation
q-addition,
q-multiplication, etc., are ambiguous, and thus we introduce a different notation: the ile-, ole-, iel-, and oel- arithmetic operators. Particularly, and partially anticipating the results of the next subsections, the deformed addition and subtraction of Ref. [
3] belong to the ole-algebra (here symbolized by
and
), considered in
Section 3.2, and the deformed multiplication and division of Ref. [
3] belong to the oel-algebra (here symbolized by
and
), considered in
Section 3.3. By
q-arithmetics we generically denote the set of the four arithmetics described in this paper. They can also be referred to as
q-algebras, understood as algebras over the real numbers, or some subset of the reals.
An i-arithmetic operator is defined as the i-number of the ordinary arithmetic operator of the corresponding o-numbers, and, complementary, an o-arithmetic operator is defined as the o-number of the ordinary arithmetic operator of the corresponding i-numbers. The generating rules follow the lines of the
-arithmetic operators of Kaniadakis [
16,
17,
18], more generally expressed by Equation (
1) of [
32] (also in [
20]), and are
The symbol ∘, a small circle without subscripts, represents any general usual arithmetic operator, ; its generalized version is represented by a larger circle ◯, with bracket subscripts: prefixed/postfixed, square/curly, in consonance with the case. To avoid ambiguity in notation, the generalized operators are represented within a circle with their subscripts within brackets. The generalized numbers are represented within brackets, with their subscripts without brackets.
Some general relations are valid for all cases (the symbol
N without subscript generically represents the neutral element of the addition for any of the four arithmetics
; similarly to
I, the neutral element of the multiplication;
A, the absorbing element of the multiplication): the neutral element of the deformed addition
N, such as
, is the corresponding deformed zero (
,
,
,
); the deformed additive opposite of
x, written as
, such that
, and
. Similarly, the neutral element of the deformed multiplication
I,
, is the corresponding deformed unity (
,
,
,
). The deformed multiplicative inverse of
x, written as
, is such that
, and
. The absorbing element
A of the deformed multiplication, such that
, coincides with the neutral element
N of the corresponding deformed addition (
,
,
,
). The deformed addition and multiplication are commutative (
,
), associative [
,
], and the deformed multiplication is (left and right) distributive with respect to the deformed addition [
,
] [
32]. Some constraints may apply to these relations according to the case, to be detailed in the next subsections.
3.1. ile-Arithmetics
The ile-algebraic operators follow from the generating rule expressed by (
15a). The ile-addition is
The neutral element of the ile-addition is
, and consequently the opposite ile-additive of
y is
The ile-difference (
15a) with
,
consistently satisfies
for all
q.
The ile-multiplication is
with its neutral ile-multiplicative element
for
(
,
for
), and its ile-absorbing element
, for all
q. The ile-division is
and
.
The ile-power of
x is defined as the ile-multiplication of
n identical factors
x,
Its analytical extension from
to
is written as
with the particular cases:
(
),
(
),
(for
),
(
),
(
), and the trivial case
. The ile-power is right-distributive with respect to the ile-multiplication:
The repeated generalized addition defines a different generalized multiplication that can be named as dot-multiplication, identified by the symbol ⊙, to distinguish it from the previous generalized multiplication (or times-multiplication), symbolized by ⊗ [Equation (
19) for the ile class]. The repeated ile-addition is given by
where we have used the generalized summation symbol for the ile class,
, compatible with the notation adopted in this work. Analytical extension from
to
yields the non commutative generalized ile-dot-multiplication:
The dot-multiplication with the unity has two behaviors, due to its non-commutativity. The trivial case () holds for the four classes (for the ile-dot-multiplication of this subsection, as well as for the ole-, iel-, and oel- of the subsections to come). The other case, , connects the dot-multiplication with the deformed numbers. The ile-dot-multiplication with unity results , with for . Repeated ile-dot-multiplication defines ile-dot-power, not explicitly shown here.
The generating rule (
15b) defines the ole-algebraic operators. The ole-addition (or ole-sum) is
Its neutral ole-additive element is
and the opposite ole-additive element
such as
is
and, consequently, the ole-subtraction is
provided
. These are the generalized addition and subtraction of Ref. [
3], referred to as
q-sum and
q-difference, respectively (see also Section 3.3.3 of Ref. [
2]).
From (
15b), the ole-product
and its neutral ole-multiplicative element
for
, together with the ole-division,
are coherent with the ole-multiplicative inverse element
. The ole-absorbing element is
. The generalized diamond multiplication defined by Equation (
24) of Ref. [
27] is related to the ole-multiplication as
, and this expression connects the distributivity property of the diamond multiplication with respect to the ole-addition (Equation (
28) of Ref. [
27]) and the distributivity of the ole-multiplication with respect to this generalized addition.
The ole-power (the repeated ole-multiplication),
after analytic continuation, becomes
with
(
),
(
),
(for
),
(
),
(
and
),
(
and
),
. The ole-power is right-distributive with respect to the ole-multiplication:
The repeated ole-addition has been defined in Ref. [
3], and reads
This is identical to Equation (8) of Ref. [
9]. Analytical extension into the real domain yields the non commutative ole-dot-multiplication:
The ole-dot-multiplication with the unity is expressed by
, with
for
and
. This relation connects the ole-dot-multiplication and the le deformed numbers with the
Q-analog of
n (
7):
, with
. The ole-dot power naturally follows from the repeated ole-dot-multiplication, not shown here.
3.2. iel-Arithmetics
According to the generating rule for i-algebras (
15a), the iel-addition is
The cutoff of the
q-exponential (
5) imposes restrictions on the domain of (
34). Its neutral iel-additive element
, is
For
, there are infinite neutral iel-additive elements, including the zero. The iel-difference reads
The opposite iel-additive element is
The iel-multiplication and the iel-division are
The neutral element of the iel-multiplication is .
The iel-absorbing element coincides with the neutral iel-additive element,
(
35).
The repeated iel-multiplication (iel-power) is given by
which is rewritten as (after analytical extension from
to
)
with the particular cases
(
),
(
),
(
),
(
and
),
(
and
),
(
and
),
(
and
),
. The iel-power is right-distributive with respect to the iel-multiplication:
The repeated iel-addition defines the iel-dot-multiplication:
Analytical extension from
to
can be represented by
The iel-number is connected to the iel-dot-multiplication by , since .
3.3. oel-Arithmetics
The oel-arithmetic operators derives from (
15b):
Equations (46) and (47) can be rearranged as
and
The oel-product and the oel-ratio were defined in Ref. [
3], referred to as
q-product and
q-ratio, respectively (see also Section 3.3.2 of Ref. [
2]). The cutoff that appears in (
48) defines regions in which the oel-arithmetical operators are ill-defined.
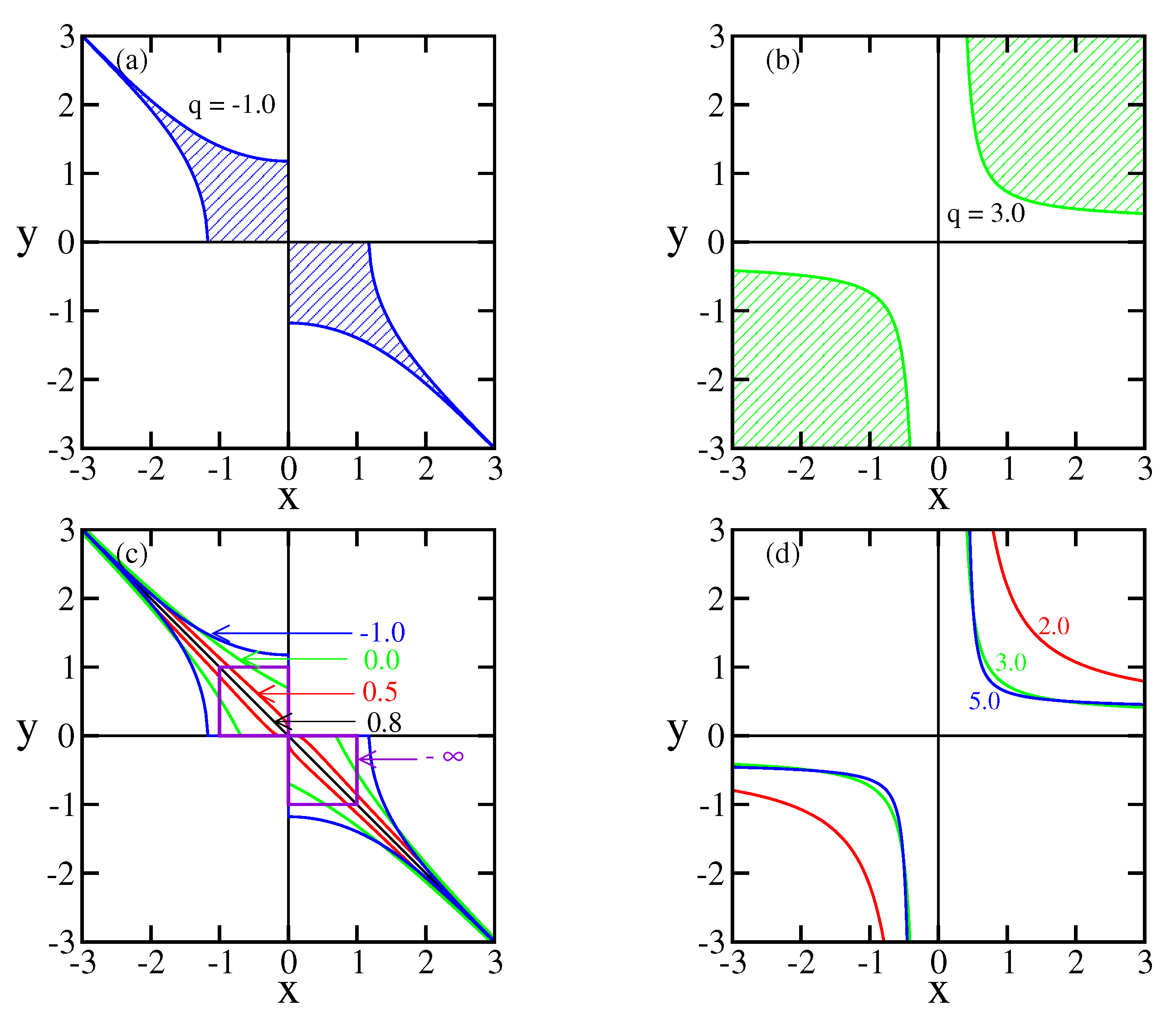
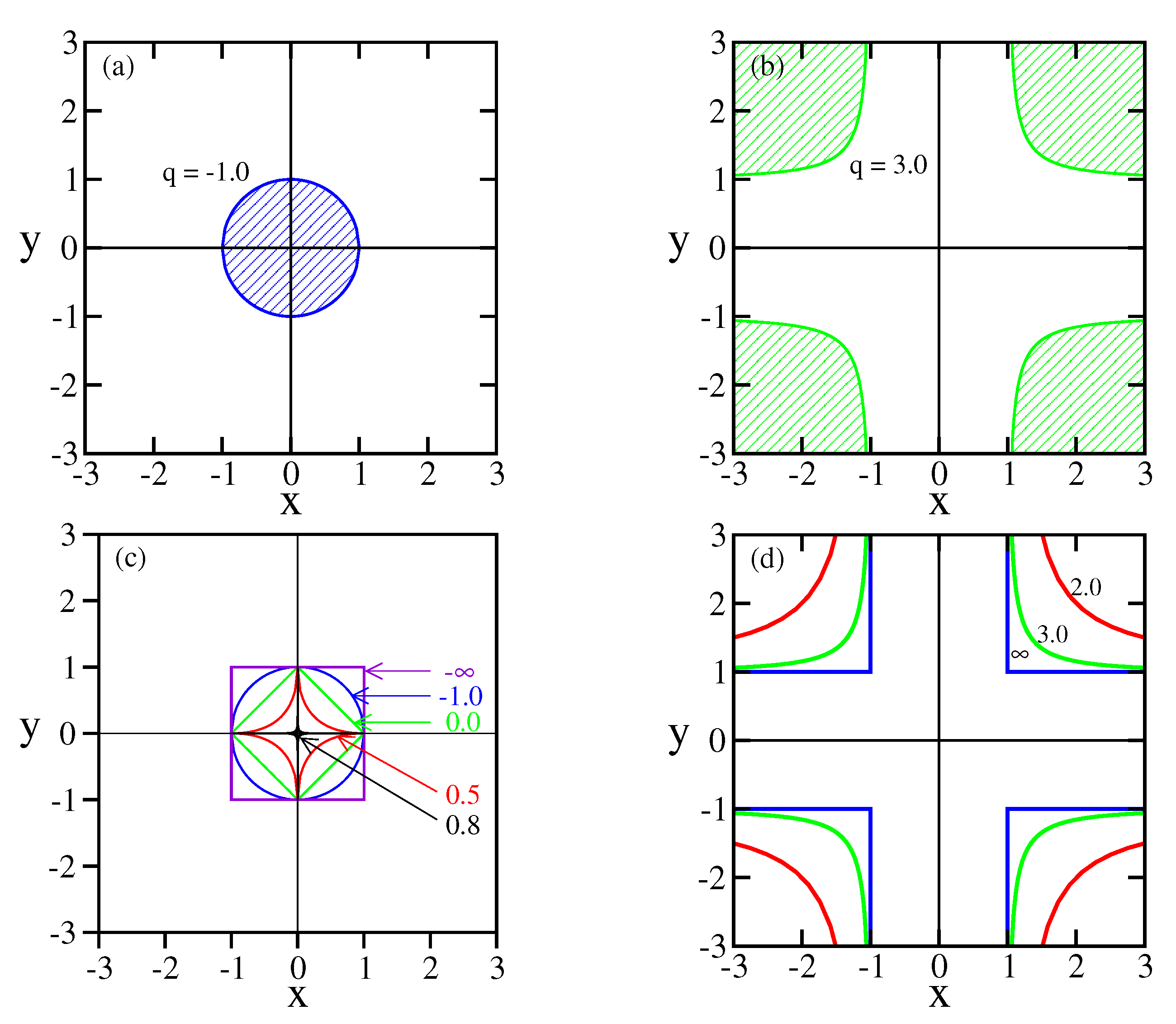
Figure 2 and
Figure 3 show the regions for which the cutoff applies for the oel-addition and oel-multiplication, respectively. The first column of each (Figures a and c) shows instances for
, and the second column (Figures b and d), for
. The first line (Figures a and b) exhibits the cutoff regions with a shaded pattern for one typical value of the parameter
q. The second line (Figures c and d) display superimposed curves of the borders of the cutoff regions for various values of
q, without shading them, otherwise they would be confusing; they follow the same pattern of the corresponding Figures a and b, respectively. The cutoff regions are closed for
(illustrated with
by
Figure 2a and
Figure 3a), and they are open and not connected, lying on the outer side delimited by the bounding curves, for
(illustrated with
by
Figure 2b and
Figure 3b). The second line of the figures help us to understand the effect of the deforming parameter
q on the cutoff regions. As
q approaches unity from below (
Figure 2c and
Figure 3c), the cutoff regions become smaller and eventually vanish. For the oel-addition,
Figure 2c, the borders of the cutoff region approach the second bisector (
), and, for the oel-multiplication,
Figure 3c, they approach the origin
. As
q approaches unity from above (
Figure 2d and
Figure 3d), the cutoff regions move away from the origin. At
, no pair of numbers
fall within the cutoff regions, and the ordinary arithmetic operators are defined everywhere.
The distributivity of the oel-multiplication with respect to the oel-addition is valid whenever the cutoff conditions of the l.h.s. and the r.h.s. of are not met. As q approaches unity, even from below or from above, the distributivity of the oel-multiplication with respect to the oel-addition is valid for all real values .
The neutral oel-additive element is
for
, and
for
. As a consequence, there is no opposite oel-additive element for
. For
,
. The absorbing element
for
, and
for
and
. If
, and
the cutoff of (
48) (see (
5)) implies that zero is an absorbing element, and, in this case, differently from the other three generalized algebras,
. The neutral multiplicative element of the oel-multiplication is
, for all values of
q. The inverse oel-multiplicative element is
This implies the unorthodox property , for .
The oel-power, previously defined in Ref. [
3] (with different symbols), is written as
This operator also appears as Equation (8) of Ref. [
9]. We make an analytical extension from
to
, and the oel-power can also be written as
Particular cases are (), (), (), (, ), (, ), (, ), (, ), and, as always, . The oel-power is right-distributive with respect to the oel-multiplication:
The repeated oel-addition is
Its analytical extension from
to
defines the non commutative oel-dot-multiplication:
The oel-number is connected to the oel-dot-multiplication by , since .
4. Deformed -Calculus
Following the lines of Ref. [
3] (see also Sections II.C and II.D of [
33]), we connect the deformed algebra with deformed calculus, and define the deformed differentials of ordinary numbers:
The definitions of the corresponding deformed differences, Equations (
18), (
27), (
36), and (45), lead to
i.e., the deformed differential of an ordinary variable (l.h.s. of (56)) is equal to the ordinary differential of the corresponding complementary deformed variable (r.h.s. of (56)): the i-differential of a variable is equal to the ordinary differential of an o-variable, (
56a) and (
56c), and the o-differential of a variable is equal to the ordinary differential of an i-variable, (
56b) and (
56d). All the deformed differentials given by (56) can be arranged as the product of the ordinary differential
by a deforming function
, with
representing the deformation (
,
,
,
). Their explicit forms are
A pair of generalized derivatives of a function , holding a duality nature between them, stem from each of the deformed differentials, according to which variable the deformed differential applies on: whether on the independent variable x,—and thus a linear deformed derivative—, generically represented by , or on the dependent variable f,—and thus a nonlinear deformed derivative—generically represented by , resulting in eight different cases:
ile-Derivatives
Nonlinear ile-derivative:
ole-Derivatives
Nonlinear ole-derivative:
iel-Derivatives
Nonlinear iel-derivative:
oel-Derivatives
Nonlinear oel-derivative:
The duality between the linear and the nonlinear generalized derivatives is expressed by
. The el-derivatives are defined for
. The ole-derivatives has been defined in Ref. [
3], then referred to as
q-derivative (the linear deformed derivative) and its dual
q-derivative (the nonlinear deformed derivative). Particularly, the linear ole-derivative (
59a) was used to generalize Fisher’s information measure and the Cramer-Rao inequality [
34]. The eigenfunction of the linear i/o-deformed derivative is the ordinary exponential of the o/i-deformed variable, which directly follows from (56). They are (written with the symbols
representing either
or
)
and
Particularly, the
q-exponential (
5) is the eigenfunction of the linear ole-derivative,
(a particular case of (
62b) with
, see (14b)). Alternatively, its ordinary derivative is
. The nonlinear deformed derivative of which the
q-exponential is eigenfunction was defined in Ref. [
11]:
where we have used the symbol,
to distinguish it from the present deformed derivatives.
The integral of the inverse of a variable,
, is typically associated to, and frequently taken as the definition of, the logarithm function. The general nonlinear cases are
The particular case of this equation for the nonlinear ole-derivative is (see (13b)):
. Alternatively, the ordinary derivative of the
q-logarithm is
. This expression yields an integral representation of the
q-logarithm function,
The dual linear deformed derivative of (
63), defined by Equation (
25) of Ref. [
33],
operates on the
q-logarithm similarly to the nonlinear ole-derivative:
.
Generalized derivatives of a power (for the linear cases), or generalized powers (for the nonlinear cases), of
q-numbers, are
Second and higher deformed linear derivatives follow the usual rule,
and so on, but for the deformed nonlinear cases, second order derivatives (and similarly for higher order derivatives) are defined as
The product rule for the deformed linear derivatives is identical to the usual one,
. The product rule for the deformed nonlinear derivatives is
The deformed antiderivatives, or indefinite deformed integrals, associated to the linear deformed derivatives are defined by
(the symbol
within parenthesis refers to the deformation, and not a limit of integration), so
and
One possibility for defining the deformed antiderivatives associated to the nonlinear deformed derivatives, particularly following the definition used in [
3] for the
ole case, is
A significant weakness with this option is that the following important properties are not satisfied:
and
5. Entropy Generator
The connection between entropies and derivatives was pointed out by Abe [
35]. He observed that the Boltzmann-Gibbs entropy can be rewritten as (with
)
with
He realized that
entropy can be similarly recast through the Jackson’s derivative of a function
[
36]
(the same deformed derivative of quantum calculus [
28]; Newtonian derivative is recovered as the limiting case
), so
This property had been interpreted as expressing the association between Boltzmann-Gibbs entropy (
) to infinitesimal translations, and Tsallis entropy to finite dilations [
2]. Abe applied this procedure a step further, and used a different derivative operator on
, generating a new symmetric entropic functional
with
invariance. Following the same line, a two-parameter derivative operator was used to define a two-parameter
entropy, that recovers the previous
,
and
with convenient choices of the indices
q and
[
37].
All the eight deformed derivatives (58)–(61) applied on (
79) result in
entropy with a multiplying function of the parameter
q:
, where
represents any of the deformed (linear or nonlinear) derivatives (at this point we do not use the tilde for the nonlinear deformed derivatives),
is a particular value of the corresponding Equation (57),
for the linear deformed derivatives, and
for the nonlinear deformed derivatives. This is a consequence of the generalized derivatives being based on infinitesimal deformed translations, and the infinitesimal nature of the translation determines the entropy (except for a multiplicative constant), despite of the deformations.
A non-trivial result is obtained by inverting the procedure. Instead of applying one of the generalized derivatives on the generating function (
79), we apply the ordinary Newtonian derivative on a generalized generating function:
The generalized generating functions are obtained through the four generalized powers, (
22), (
31), (
41), (
52):
,
,
,
. The resulting functionals are
The use of the generalized derivatives essentially result in the same,
, except for a multiplicative constant for the le cases, since
. The certainty distribution originates non zero values for the le functionals:
for
, and,
for
, since
and
. Additionally, the le functionals present negative values:
presents negative values for
,
presents negative values for
. Besides, there are ranges of values of
q for which neither
nor
present a definite concavity (two instances:
, for ile;
, for ole). These are severe drawbacks and consequently (
83a) and (
83b) can not be considered as legitimate entropic forms.
The iel-functional
fails on the expansibility property for
(adding events of zero probability), since
is not defined. For
, it is expansible, non negative and the certainty distribution (
) implies
, so, (
83c) is admissible as an entropic form for
.
The oel-functional (
83d) is the nonadditive entropy
(see Equation (13b)), vastly considered in the literature. This result permits to amend a previous statement:
entropy, that is associated to finite dilations, can also be associated to infinitesimal translations, but in a deformed space expressed by the oel-power.
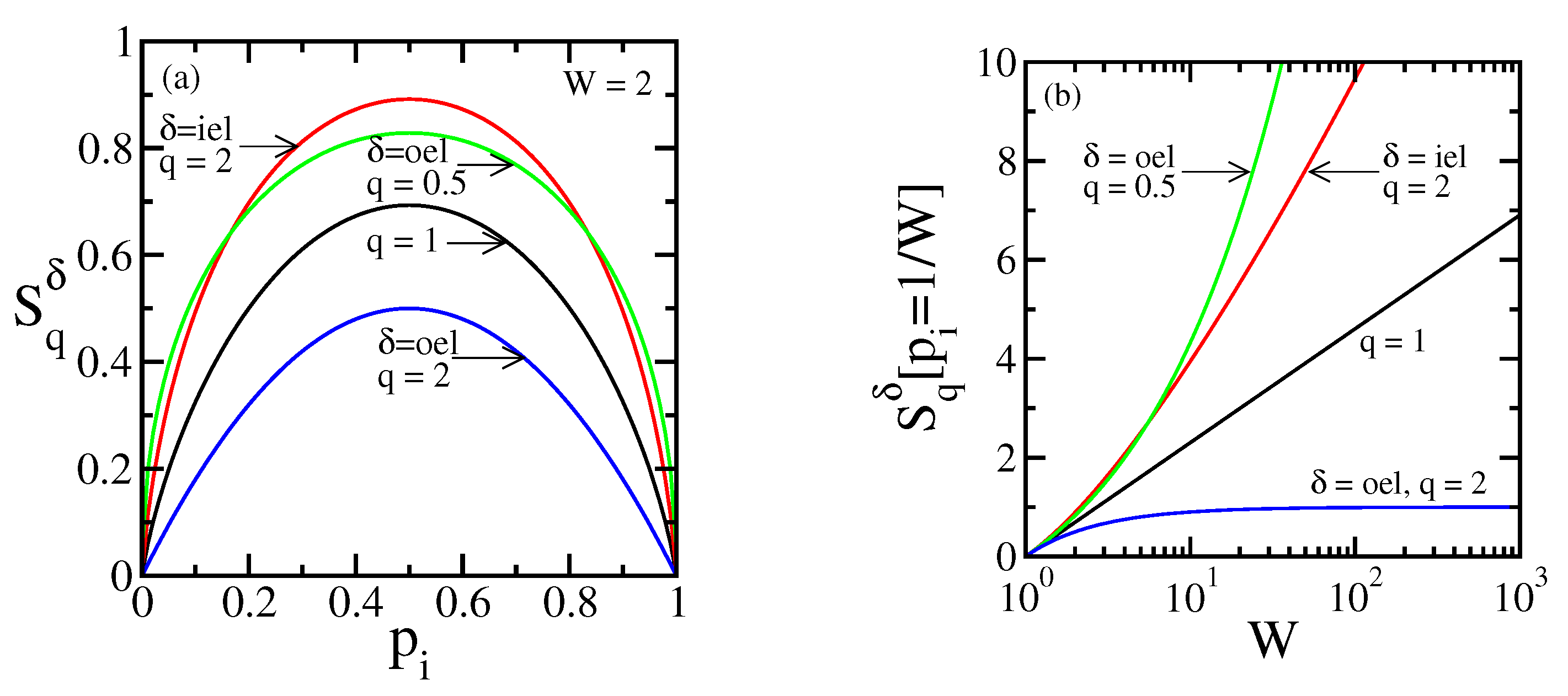
Figure 4a illustrates the concavity for the two admissible entropic functionals, Equation (
83c) with
and Equation (
83d), for a two-state system.
Figure 4b illustrates el-entropies as monotonically increasing functions of the number of states
W for the equiprobable distribution,
,
, with the abscissa in logarithm scale, for which the usual case appears as a straight line.
6. Final Remarks
A forerunner of the transformations given by Equation (10) is the relation between Rényi entropy,
, and Tsallis entropy (
2) (see Equation (8) of Ref. [
1]),
, and, equivalently,
. Another instance of the transformation represented by the ile-number (
10a) appeared in Equation (
22) of Ref. [
10] and allowed the generalization of trigonometric functions. The ole-number
appeared as Equation (
5) of Ref. [
38], as the scaling factor of the generalized Kolmogorov-Nagumo average for expressing the Rényi entropy. A former example of connecting deformed numbers with deformed differential operators have appeared in Ref. [
39], with the transformation (
10a) and the deformed differential (
59a), establishing an equivalence between a position-dependent mass system in a usual space and a constant mass within a deformed space. These works have been recently extended to the deformed version of the Fokker-Planck equation for inhomogeneous medium with position-dependent mass [
33]. In addition, the use of the iel-number, Equation (
11a), to the generalization of the Riemann’s zeta function has been recently advanced in [
40].
Expressions with operations belonging to one class of
q-algebra may result in operations belonging to a different class. Some instances: the following are generalizations of the logarithm of a product as a sum of logarithms (
):
Generalizations of the logarithm of a power,
, are
The counterpart of these expressions are generalizations of the exponential of a sum as a product of exponentials,
:
and the power of an exponential as the exponential of a product (
):
Relations (84) are also valid for the logarithm, or for the
q-logarithm, of a ratio, simply replacing ordinary or general products by ordinary or general ratios, and ordinary or general sums by ordinary or general differences. Similarly, relations (86) are also valid for the exponential, or for the
q-exponential, of a difference, by replacing the operators accordingly. Sums of
q-logarithm functions, Equation (
84b), appeared in the literature prior to the definition of the
q-product [
3]—here called the oel-product, Equation (
48)—within the context of the generalization of Boltzmann’s molecular chaos hypothesis and the
H Theorem, see Equation (
16) of Ref. [
41] and Equation (
22) of Ref. [
42]. The oel-product has shown to be a key ingredient to the generalization of the Fourier transform and the central limit theorem [
43,
44]. It is allowed to think that the present algebras may be relevant within these contexts.
Equation (
85a) is the one referred to in the Introduction, that makes
extensive: consider a composed system for which its subsystems have
available states. If they are independent, the number of available states of the composed system is
, and, besides, if they are identical,
. Correlations between the subsystems lead to a smaller number of available states for the composed system, and particular strong correlations represented by
, with
, makes
. This is a non trivial case of extensivity.
Different possibilities for generating rules of arithmetic operations, instead of (15), are
,
; These patterns are used in References [
27,
40].
Weberszpil, Lazo, and Helayël-Neto [
45] have shown that the linear ole-derivative (
59a) is the first order expansion of the Hausdorff derivative. Whether the other generalized derivatives are also connected to fractal derivatives and fractal metrics remains to be investigated.
Two of the functionals obtained with the recipe of applying the ordinary derivatives to a generalized version of the generating function, (
82), result in admissible entropic forms corresponding to the el-class:
(
83c), and
(
83d). The other functionals (
83a) and (
83b) are not admissible to be considered as entropies, but this does not mean that the le-algebras or le-calculus they are based on are not feasible for other applications.
Extension to the complex domain of the deformed numbers still remains to be explored. Two-parameter generalization are not addressed here, we just advance a few lines. Two-parameter generalizations of numbers in accordance with the present developments are given by
The use of the relatively uncommon subscripted prefix to represent the two parameter deformed number may be avoided, since there is no ambiguity with the symbol
. Two-parameter arithmetic operators follow straightforwardly:
for which, of course, all the previous developments are particular cases. The two-parameter algebra of Ref. [
15] is obtained through a different generating rule than (
89): it derives from the two-parameter generalized logarithm and exponential functions [
14] (Equations (16) and (17) of [
15]).
It also comes naturally the two-parameter derivative
, with deformation on both the independent and dependent variables. A broader generalization of the derivatives can be defined by using not only deformations on the variation of the independent and dependent variable, but also on the ratio among them, with three parameters, in a rather intricate way, say:
q for the deformed differential of the independent variable,
for the deformed differential of the dependent variable, and
for the deformed ratio between them. A particular case with
was shown in Ref. [
46], and, more recently, in Ref. [
47].
Finally, all the present scenario stands on the pair of q-logarithm/q-exponential functions, inverse of each other. The whole picture may be differently deformed by using different continuous, monotonous, and invertible pair of functions, in agreement with Equation (8).



{kind=link}
{kind=link}
{kind=link}
{kind=link}



