
On Edge Detection Algorithms for Water-Repellent Images of Insulators Taking into Account Efficient Approaches
Abstract
:1. Introduction
- Sobel Operator: One of the most commonly used edge detection algorithms is the Sobel operator. The Sobel operator is a gradient-based method that calculates the intensity gradient of an image at each pixel using a small convolution kernel. The Sobel operator has two kernels, one for horizontal edges and one for vertical edges, which are convolved with the image to produce two separate gradient images. The final edge map is obtained by combining these two gradient images.
- Canny Edge Detector: The Canny edge detector is another popular method used for edge detection. The Canny edge detector is a multi-stage algorithm that involves smoothing the image to reduce noise, calculating the gradient magnitude and orientation, applying nonmaximum suppression to thin the edges, and finally thresholding to identify strong edges.
- Laplacian Operator: The Laplacian operator is another gradient-based edge detection algorithm that calculates the second derivative of an image to detect edges. The Laplacian operator is more sensitive to noise than other edge detection algorithms, so it is often used in combination with other methods to improve edge detection performance.
- Marr–Hildreth Edge Detector: The Marr–Hildreth edge detector uses a Laplacian of the Gaussian (LoG) filter to detect edges. The LoG filter is used to smooth the image and highlight edges, and then zero crossings are detected to identify edges.
- Prewitt Operator: The Prewitt operator is another gradient-based edge detection algorithm that calculates the intensity gradient of an image using a 3 × 3 convolution kernel. The Prewitt operator is similar to the Sobel operator, but it has a simpler kernel and is less computationally expensive.
- Roberts Cross Operator: The Roberts cross operator is a simple edge detection algorithm that uses two kernels to detect edges in the horizontal and vertical directions. The Roberts cross operator is less sensitive to noise than other edge detection algorithms, but it is also less accurate.
2. A Brief Overview of Some Essential Concepts in Fractional Calculus
3. Some Popular Mask-Based Techniques Used for Image Processing
3.1. Windows Mask Applications in Image Denoising
- The following symmetrical window mask is used as a fractional integral mask:
- Also, the fractional integral mask in size of is suggested as
- The structure of this mask, considering the dimensions , becomes as follows:
- The structure of this mask, considering the dimensions , becomes as follows:
- Finally, the structure of this mask, considering the dimensions , becomes as follows in a symmetric form as:
3.2. Windows Mask Applications in Edge Detection
- Type I
- Type II
4. Some Recent Fractional Masks in Edge Detecting
4.1. The Results of the Grumwald–Letnikov (GL) Approach
- Fractional window mask of GL1:
- Fractional window mask of GL2:
4.2. Toufik–Atangana’s Method-Based Fractional Window Masks (TA) Approach
- Fractional window mask of TA1:
- Fractional window mask of TA2:
4.3. Euler’s Method-Based Fractional Window Masks (Eu)
- Fractional window mask of Eu1
- Fractional window mask of Eu2
4.4. The Middle Point Approach Based on Fractional Window Masks (MP)
- Fractional window mask of MP1
- Fractional window mask of MP2
5. Numerical Implementations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, R.; Zhang, H.; Chen, Z.; Yu, N.; Kong, W.; Li, T.; Wang, E.; Wu, X.; Liu, Y. Denoising method of ground-penetrating radar signal based on independent component analysis with multifractal spectrum. Measurement 2022, 192, 110886. [Google Scholar]
- Liu, F.; Zhao, X.; Zhu, Z.; Zhai, Z.; Liu, Y. Dual-microphone active noise cancellation paved with Doppler assimilation for TADS. Mech. Syst. Signal Process. 2023, 184, 109727. [Google Scholar] [CrossRef]
- Ghanbari, B.; Atangana, A. A new application of fractional Atangana–Baleanu derivatives: Designing ABC-fractional masks in image processing. Phys. A Stat. Mech. Its Appl. 2020, 542, 123516. [Google Scholar] [CrossRef]
- Zhu, H.; Xue, M.; Wang, Y.; Yuan, G.; Li, X. Fast visual tracking with siamese oriented region proposal network. IEEE Signal Process. Lett. 2022, 29, 1437–1441. [Google Scholar] [CrossRef]
- Liu, R.; Wang, X.; Lu, H.; Wu, Z.; Fan, Q.; Li, S.; Jin, X. SCCGAN: Style and characters inpainting based on CGAN. Mob. Netw. Appl. 2021, 26, 3–12. [Google Scholar] [CrossRef]
- Liu, Q.; Yuan, H.; Hamzaoui, R.; Su, H.; Hou, J.; Yang, H. Reduced reference perceptual quality model with application to rate control for video-based point cloud compression. IEEE Trans. Image Process. 2021, 30, 6623–6636. [Google Scholar] [CrossRef]
- Sheng, H.; Wang, S.; Yang, D.; Cong, R.; Cui, Z.; Chen, R. Cross-View Recurrence-based Self-Supervised Super-Resolution of Light Field. IEEE Trans. Circuits Syst. Video Technol. 2023. [Google Scholar] [CrossRef]
- Zhu, W.; Chen, J.; Sun, Q.; Li, Z.; Tan, W.; Wei, Y. Reconstructing of High-Spatial-Resolution Three-Dimensional Electron Density by Ingesting SAR-Derived VTEC Into IRI Model. IEEE Geosci. Remote Sens. Lett. 2022, 19, 4508305. [Google Scholar] [CrossRef]
- Zhou, X.; Sun, K.; Wang, J.; Zhao, J.; Feng, C.; Yang, Y.; Zhou, W. Computer Vision Enabled Building Digital Twin Using Building Information Model. IEEE Trans. Ind. Inform. 2022, 19, 2684–2692. [Google Scholar] [CrossRef]
- Zhuo, Z.; Du, L.; Lu, X.; Chen, J.; Cao, Z. Smoothed Lv distribution based three-dimensional imaging for spinning space debris. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5113813. [Google Scholar] [CrossRef]
- Li, B.; Tan, Y.; Wu, A.G.; Duan, G.R. A distributionally robust optimization based method for stochastic model predictive control. IEEE Trans. Autom. Control 2021, 67, 5762–5776. [Google Scholar] [CrossRef]
- Xie, X.; Huang, L.; Marson, S.M.; Wei, G. Emergency response process for sudden rainstorm and flooding: Scenario deduction and Bayesian network analysis using evidence theory and knowledge meta-theory. Nat. Hazards 2023, 117, 3307–3329. [Google Scholar] [CrossRef]
- Xie, X.; Xie, B.; Cheng, J.; Chu, Q.; Dooling, T. A simple Monte Carlo method for estimating the chance of a cyclone impact. Nat. Hazards 2021, 107, 2573–2582. [Google Scholar] [CrossRef]
- Zhang, J.; Zhu, C.; Zheng, L.; Xu, K. ROSEFusion: Random optimization for online dense reconstruction under fast camera motion. ACM Trans. Graph. 2021, 40, 56. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, N.; Liu, A.A.; Li, W.; Zhang, Y. High-order interaction learning for image captioning. IEEE Trans. Circuits Syst. Video Technol. 2021, 32, 4417–4430. [Google Scholar] [CrossRef]
- Wang, Y.; Su, Y.; Li, W.; Xiao, J.; Li, X.; Liu, A.A. Dual-path Rare Content Enhancement Network for Image and Text Matching. IEEE Trans. Circuits Syst. Video Technol. 2023. [Google Scholar] [CrossRef]
- Zhou, L.; Ye, Y.; Tang, T.; Nan, K.; Qin, Y. Robust matching for SAR and optical images using multiscale convolutional gradient features. IEEE Geosci. Remote Sens. Lett. 2021, 19, 4017605. [Google Scholar] [CrossRef]
- Deng, X.; Liu, E.; Li, S.; Duan, Y.; Xu, M. Interpretable Multi-modal Image Registration Network Based on Disentangled Convolutional Sparse Coding. IEEE Trans. Image Process. 2023, 32, 1078–1091. [Google Scholar] [CrossRef]
- Tan, X.; Lin, J.; Xu, K.; Chen, P.; Ma, L.; Lau, R.W. Mirror detection with the visual chirality cue. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 45, 3492–3504. [Google Scholar] [CrossRef]
- Wang, S.; Hu, X.; Sun, J.; Liu, J. Hyperspectral Anomaly Detection Using Ensemble and Robust Collaborative Representation. Inf. Sci. 2023, 624, 748–760. [Google Scholar] [CrossRef]
- Lin, Z.; Wang, H.; Li, S. Pavement anomaly detection based on transformer and self-supervised learning. Autom. Constr. 2022, 143, 104544. [Google Scholar] [CrossRef]
- Zhang, J.; Peng, S.; Gao, Y.; Zhang, Z.; Hong, Q. APMSA: Adversarial Perturbation Against Model Stealing Attacks. IEEE Trans. Inf. Forensics Secur. 2023, 18, 1667–1679. [Google Scholar] [CrossRef]
- Zhou, G.; Song, B.; Liang, P.; Xu, J.; Yue, T. Voids filling of DEM with multiattention generative adversarial network model. Remote Sens. 2021, 14, 1206. [Google Scholar] [CrossRef]
- Ban, Y.; Liu, M.; Wu, P.; Yang, B.; Liu, S.; Yin, L.; Zheng, W. Depth estimation method for monocular camera defocus images in microscopic scenes. Electronics 2022, 11, 2012. [Google Scholar] [CrossRef]
- Fu, C.; Yuan, H.; Xu, H.; Zhang, H.; Shen, L. TMSO-Net: Texture adaptive multi-scale observation for light field image depth estimation. J. Vis. Commun. Image Represent. 2023, 90, 103731. [Google Scholar] [CrossRef]
- Li, B.; Zhang, M.; Rong, Y.; Han, Z. Transceiver optimization for wireless powered time-division duplex MU-MIMO systems: Non-robust and robust designs. IEEE Trans. Wirel. Commun. 2021, 21, 4594–4607. [Google Scholar] [CrossRef]
- Ma, X.; Dong, Z.; Quan, W.; Dong, Y.; Tan, Y. Real-time assessment of asphalt pavement moduli and traffic loads using monitoring data from Built-in Sensors: Optimal sensor placement and identification algorithm. Mech. Syst. Signal Process. 2023, 187, 109930. [Google Scholar] [CrossRef]
- Zhang, X.; Wen, S.; Yan, L.; Feng, J.; Xia, Y. A hybrid-convolution spatial–temporal recurrent network for traffic flow prediction. Comput. J. 2022. [Google Scholar] [CrossRef]
- Han, Y.; Wang, B.; Guan, T.; Tian, D.; Yang, G.; Wei, W.; Tang, H.; Chuah, J.H. Research on road environmental sense method of intelligent vehicle based on tracking check. IEEE Trans. Intell. Transp. Syst. 2022, 24, 1261–1275. [Google Scholar] [CrossRef]
- Chen, J.; Wang, Q.; Cheng, H.H.; Peng, W.; Xu, W. A Review of Vision-Based Traffic Semantic Understanding in ITSs. IEEE Trans. Intell. Transp. Syst. 2022, 23, 19954–19979. [Google Scholar] [CrossRef]
- Chen, J.; Xu, M.; Xu, W.; Li, D.; Peng, W.; Xu, H. A Flow Feedback Traffic Prediction Based on Visual Quantified Features. IEEE Trans. Intell. Transp. Syst. 2023. [Google Scholar] [CrossRef]
- Chen, J.; Wang, Q.; Peng, W.; Xu, H.; Li, X.; Xu, W. Disparity-Based Multiscale Fusion Network for Transportation Detection. IEEE Trans. Intell. Transp. Syst. 2022, 23, 18855–18863. [Google Scholar] [CrossRef]
- Fan, W.; Yang, L.; Bouguila, N. Unsupervised grouped axial data modeling via hierarchical Bayesian nonparametric models with Watson distributions. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 44, 9654–9668. [Google Scholar] [CrossRef] [PubMed]
- Dai, B.; Zhang, B.; Niu, Z.; Feng, Y.; Liu, Y.; Fan, Y. A novel ultrawideband branch waveguide coupler with low amplitude imbalance. IEEE Trans. Microw. Theory Tech. 2022, 70, 3838–3846. [Google Scholar] [CrossRef]
- Zhang, Y.; Shao, Z.; Zhang, J.; Wu, B.; Zhou, L. The effect of image enhancement on influencer’s product recommendation effectiveness: The roles of perceived influencer authenticity and post type. J. Res. Interact. Mark. 2023. [Google Scholar] [CrossRef]
- Feng, Y.; Zhang, B.; Liu, Y.; Niu, Z.; Fan, Y.; Chen, X. A D-band manifold triplexer with high isolation utilizing novel waveguide dual-mode filters. IEEE Trans. Terahertz Sci. Technol. 2021, 12, 678–681. [Google Scholar] [CrossRef]
- Xu, K.D.; Guo, Y.J.; Liu, Y.; Deng, X.; Chen, Q.; Ma, Z. 60-GHz compact dual-mode on-chip bandpass filter using GaAs technology. IEEE Electron. Device Lett. 2021, 42, 1120–1123. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, K.; Liu, L.; Lan, H.; Lin, L. Tcgl: Temporal contrastive graph for self-supervised video representation learning. IEEE Trans. Image Process. 2022, 31, 1978–1993. [Google Scholar] [CrossRef]
- Cheng, L.; Yin, F.; Theodoridis, S.; Chatzis, S.; Chang, T.H. Rethinking Bayesian learning for data analysis: The art of prior and inference in sparsity-aware modeling. IEEE Signal Process. Mag. 2022, 39, 18–52. [Google Scholar] [CrossRef]
- Nie, W.; Bao, Y.; Zhao, Y.; Liu, A. Long Dialogue Emotion Detection Based on Commonsense Knowledge Graph Guidance. IEEE Trans. Multimed. 2023. [Google Scholar] [CrossRef]
- Zhou, X.; Zhang, L. SA-FPN: An effective feature pyramid network for crowded human detection. Appl. Intell. 2022, 52, 12556–12568. [Google Scholar] [CrossRef]
- Xie, X.; Jin, X.; Wei, G.; Chang, C.T. Monitoring and early warning of SMEs’ shutdown risk under the impact of global pandemic shock. Systems. Systems 2023, 11, 260. [Google Scholar] [CrossRef]
- Liu, H.; Li, J.; Meng, X.; Zhou, B.; Fang, G.; Spencer, B.F. Discrimination Between Dry and Water Ices by Full Polarimetric Radar: Implications for China’s First Martian Exploration. IEEE Trans. Geosci. Remote Sens. 2022, 61, 5100111. [Google Scholar] [CrossRef]
- Liu, H.; Yuan, H.; Liu, Q.; Hou, J.; Zeng, H.; Kwong, S. A Hybrid Compression Framework for Color Attributes of Static 3D Point Clouds. IEEE Trans. Circuits Syst. Video Technol. 2022, 32, 1564–1577. [Google Scholar] [CrossRef]
- Guan, Z.; Jing, J.; Deng, X.; Xu, M.; Jiang, L.; Zhang, Z.; Li, Y. DeepMIH: Deep invertible network for multiple image hiding. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 372–390. [Google Scholar] [CrossRef]
- Tian, H.; Huang, N.; Niu, Z.; Qin, Y.; Pei, J.; Wang, J. Mapping winter crops in China with multi-source satellite imagery and phenology-based algorithm. Remote Sens. 2019, 11, 820. [Google Scholar] [CrossRef] [Green Version]
- Tian, H.; Pei, J.; Huang, J.; Li, X.; Wang, J.; Zhou, B.; Qin, Y.; Wang, L. Garlic and Winter Wheat Identification Based on Active and Passive Satellite Imagery and the Google Earth Engine in Northern China. Remote Sens. 2020, 12, 3539. [Google Scholar] [CrossRef]
- Zhuang, Y.; Chen, S.; Jiang, N.; Hu, H. An Effective WSSENet-Based Similarity Retrieval Method of Large Lung CT Image Databases. KSII Trans. Internet Inf. Syst. 2022, 16, 2359–2376. [Google Scholar]
- Xu, J.; Zhang, X.; Park, S.H.; Guo, K. The alleviation of perceptual blindness during driving in urban areas guided by saccades recommendation. IEEE Trans. Intell. Transp. Syst. 2022, 23, 16386–16396. [Google Scholar] [CrossRef]
- Xu, J.; Park, S.H.; Zhang, X.; Hu, J. The improvement of road driving safety guided by visual inattentional blindness. IEEE Trans. Intell. Transp. Syst. 2022, 23, 4972–4981. [Google Scholar] [CrossRef]
- Xiong, S.; Li, B.; Zhu, S. DCGNN: A single-stage 3D object detection network based on density clustering and graph neural network. Complex Intell. Syst. 2023, 9, 3399–3408. [Google Scholar] [CrossRef]
- Cheng, D.; Chen, L.; Lv, C.; Guo, L.; Kou, Q. Light-Guided and Cross-Fusion U-Net for Anti-Illumination Image Super-Resolution. IEEE Trans. Circuits Syst. Video Technol. 2022, 32, 8436–8449. [Google Scholar] [CrossRef]
- Zhou, G.; Zhang, R.; Huang, S. Generalized buffering algorithm. IEEE Access 2021, 9, 27140–27157. [Google Scholar] [CrossRef]
- Yang, M.; Wang, H.; Hu, K.; Yin, G.; Wei, Z. IA-Net: An Inception–Attention-Module-Based Network for Classifying Underwater Images From Others. IEEE J. Ocean. Eng. 2022, 47, 704–717. [Google Scholar] [CrossRef]
- Zhong, Q.; Han, S.; Shi, K.; Zhong, S.; Kwon, O.M. Co-design of adaptive memory event-triggered mechanism and aperiodic intermittent controller for nonlinear networked control systems. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 4979–4983. [Google Scholar] [CrossRef]
- Xiong, Z.; Zeng, M.; Zhang, X.; Zhu, S.; Xu, F.; Zhao, X.; Wu, Y.; Li, X. Social similarity routing algorithm based on socially aware networks in the big data environment. J. Signal Process. Syst. 2022, 94, 1253–1267. [Google Scholar]
- Zhou, G.; Wang, Q.; Huang, Y.; Tian, J.; Li, H.; Wang, Y. True2 Orthoimage Map Generation. Remote Sensing. Remote Sens. 2022, 14, 4396. [Google Scholar] [CrossRef]
- Cong, R.; Sheng, H.; Yang, D.; Cui, Z.; Chen, R. Exploiting Spatial and Angular Correlations With Deep Efficient Transformers for Light Field Image Super-Resolution. IEEE Trans. Multimed. 2023. [Google Scholar] [CrossRef]
- Wang, S.; Sheng, H.; Yang, D.; Zhang, Y.; Wu, Y.; Wang, S. Extendable multiple nodes recurrent tracking framework with RTU++. IEEE Trans. Image Process. 2022, 31, 5257–5271. [Google Scholar] [CrossRef]
- Yang, D.; Zhu, T.; Wang, S.; Wang, S.; Xiong, Z. LFRSNet: A robust light field semantic segmentation network combining contextual and geometric features. Front. Environ. Sci. 2022, 10, 996513. [Google Scholar] [CrossRef]
- Yan, A.; Li, Z.; Cui, J.; Huang, Z.; Ni, T.; Girard, P.; Wen, X. LDAVPM: A latch design and algorithm-based verification protected against multiple-node-upsets in harsh radiation environments. IEEE Trans.-Comput.-Aided Des. Integr. Circuits Syst. 2022, 42, 2069–2073. [Google Scholar] [CrossRef]
- Cheng, B.; Zhu, D.; Zhao, S.; Chen, J. Situation-aware IoT service coordination using the event-driven SOA paradigm. IEEE Trans. Netw. Serv. Manag. 2016, 13, 349–361. [Google Scholar] [CrossRef]
- Wang, J.; Tian, J.; Zhang, X.; Yang, B.; Liu, S.; Yin, L.; Zheng, W. Control of time delay force feedback teleoperation system with finite time convergence. Front. Neurorobot. 2022, 16, 877069. [Google Scholar] [CrossRef] [PubMed]
- Gu, Q.; Tian, J.; Yang, B.; Liu, M.; Gu, B.; Yin, Z.; Yin, L.; Zheng, W. A novel architecture of a six degrees of freedom parallel platform. Electronics 2023, 12, 1774. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, Z.; Guo, D.; Zhao, Z.; Lin, T.; Zhang, C. Underground space use of urban built-up areas in the central city of Nanjing: Insight based on a dynamic population distribution. Undergr. Space 2022, 7, 748–766. [Google Scholar] [CrossRef]
- Guo, F.; Zhou, W.; Lu, Q.; Zhang, C. Path extension similarity link prediction method based on matrix algebra in directed networks. Comput. Commun. 2022, 187, 83–92. [Google Scholar] [CrossRef]
- Li, J.; Deng, Y.; Sun, W.; Li, W.; Li, R.; Li, Q.; Liu, Z. Resource orchestration of cloud-edge–based smart grid fault detection. ACM Trans. Sens. Netw. (TOSN) 2022, 18, 1–26. [Google Scholar] [CrossRef]
- Wang, S.; Sheng, H.; Zhang, Y.; Yang, D.; Shen, J.; Chen, R. Blockchain-empowered distributed multi-camera multi-target tracking in edge computing. IEEE Trans. Ind. Inform. 2023. [Google Scholar] [CrossRef]
- Wang, Y.; Han, X.; Jin, S. MAP based modeling method and performance study of a task offloading scheme with time-correlated traffic and VM repair in MEC systems. Wirel. Netw. 2023, 29, 47–68. [Google Scholar] [CrossRef]
- Dai, X.; Xiao, Z.; Jiang, H.; Lui, J.C.S. UAV-Assisted Task Offloading in Vehicular Edge Computing Networks. IEEE Trans. Mob. Comput. 2023. [Google Scholar] [CrossRef]
- Zong, C.; Wan, Z. Container ship cell guide accuracy check technology based on improved 3D point cloud instance segmentation. Brodogradnja 2022, 73, 23–35. [Google Scholar] [CrossRef]
- Xiong, Z.; Li, X.; Zhang, X.; Deng, M.; Xu, F.; Zhou, B.; Zeng, M. A Comprehensive Confirmation-based Selfish Node Detection Algorithm for Socially Aware Networks. J. Signal Process. Syst. 2023, 1–19. [Google Scholar] [CrossRef]
- Wei, X.; Wu, Y.; Dong, F.; Zhang, J.; Sun, S. Developing an image manipulation detection algorithm based on edge detection and faster r-cnn. Symmetry 2019, 11, 1223. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Liu, Y.; Liu, T.; Li, Y.; Ye, W. Edge detection algorithm of a symmetric difference kernel SAR image based on the GAN network model. Symmetry 2019, 11, 557. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Ma, L. Insulator Hydrophobic Image Edge Detection Algorithm considering Deconvolution and Deblurring Algorithm. Math. Probl. Eng. 2022, 2022, 1871079. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, 6, 679–698. [Google Scholar] [CrossRef]
- Melin, P.; Mendoza, O.; Castillo, O. An Improved Method for Edge Detection Based on Interval Type-2 Fuzzy Logic. Expert Syst. Appl. 2010, 37, 8527–8535. [Google Scholar] [CrossRef]
- Samko, G.; Kilbas, A.A.; Marichev, O.I. Fractional Integrals and Derivatives: Theory and Applications; Gordon & Breach: Yverdon, Switzerland, 1993. [Google Scholar]
- Caputo, M.; Fabrizio, M. A new definition of fractional derivative without singular kernal. Prog. Fract. Differ. Appl. 2015, 1, 73–85. [Google Scholar]
- Atangana, A.; Baleanu, D. New fractional derivatives with non-local and non-singular kernel: Theory and application to heat transfer model. Therm. Sci. 2016, 20, 763–769. [Google Scholar] [CrossRef] [Green Version]
- Baleanu, D.; Jajarmi, A.; Mohammadi, H.; Rezapour, S. A new study on the mathematical modeling of human liver with Caputo–Fabrizio fractional derivative. Chaos Solitons Fractals 2020, 134, 109705. [Google Scholar] [CrossRef]
- Defterli, O.; Baleanu, D.; Jajarmi, A.; Sajjadi, S.S.; Alshaikh, N.; Asad, J. Fractional treatment: An accelerated mass-spring system. Rom. Rep. Phys. 2022, 74, 1–3. [Google Scholar]
- Baleanu, D.; Hasanabadi, M.; Vaziri, A.M.; Jajarmi, A. A new intervention strategy for an HIV/AIDS transmission by a general fractional modeling and an optimal control approach. Chaos Solitons Fractals 2023, 167, 113078. [Google Scholar] [CrossRef]
- Ghanbari, B.; Gómez-Aguilar, J.F. New exact optical soliton solutions for nonlinear Schrödinger equation with second-order spatio-temporal dispersion involving M-derivative. Mod. Phys. Lett. B 2019, 33, 1950235. [Google Scholar] [CrossRef] [Green Version]
- Ghanbari, B. Chaotic behaviors of the prevalence of an infectious disease in a prey and predator system using fractional derivatives. Math. Methods Appl. Sci. 2021, 44, 9998–10013. [Google Scholar] [CrossRef]
- Ghanbari, B. Abundant exact solutions to a generalized nonlinear Schrödinger equation with local fractional derivative. Math. Methods Appl. Sci. 2021, 44, 8759–8774. [Google Scholar] [CrossRef]
- Ghanbari, B. On approximate solutions for a fractional prey–predator model involving the Atangana–Baleanu derivative. Adv. Differ. Equations 2020, 2020, 679. [Google Scholar] [CrossRef]
- Wang, M.; Wang, S.; Ju, X.; Wang, Y. Image Denoising Method Relying on Iterative Adaptive Weight-Mean Filtering. Symmetry 2023, 15, 1181. [Google Scholar] [CrossRef]
- Ghanbari, B.; Atangana, A. Some new edge detecting techniques based on fractional derivatives with non-local and non-singular kernels. Adv. Differ. Equations 2020, 2020, 435. [Google Scholar] [CrossRef]
- Podlubny, I. Fractional Dfferential Equations, Vol. 198 of Mathematics in Science and Engineering; Academic Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Toufik, M.; Atangana, A. New numerical approximation of fractional derivative with non-local and non-singular kernel: Application to chaotic models. Eur. Phys. J. Plus 2017, 132, 444. [Google Scholar] [CrossRef]
- Li, C.; Zeng, F. The finite difference methods for fractional ordinary differential equations. Num. Funct. Anal. Opt 2013, 34, 149–179. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample No. | CM | PM | SM | GL1 | GL2 | TA1 | TA2 | Eu1 | Eu2 | MP1 | MP2 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | −39.58 | 11.56 | 11.29 | 11.57 | 11.45 | 11.55 | 11.54 | 11.54 | 11.52 | 11.57 | 11.55 |
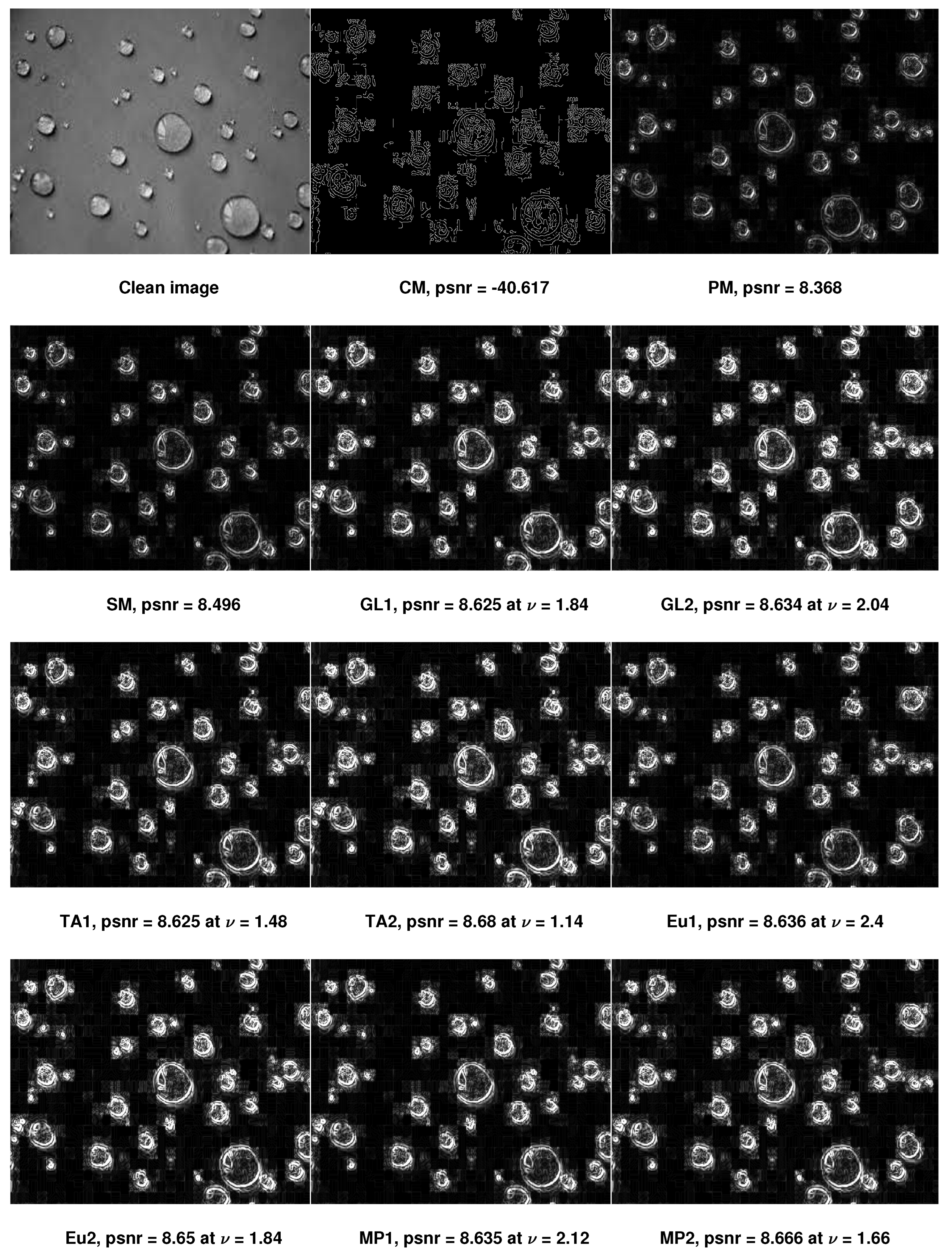
| 2 | −40.62 | 8.37 | 8.50 | 8.63 | 8.64 | 8.63 | 8.68 | 8.64 | 8.65 | 8.64 | 8.67 |
| 3 | −43.74 | 6.26 | 6.49 | 6.67 | 6.67 | 6.67 | 6.68 | 6.65 | 6.67 | 6.67 | 6.68 |
| 4 | −40.48 | 10.84 | 11.28 | 11.36 | 11.35 | 11.37 | 11.31 | 11.29 | 11.31 | 11.36 | 11.30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, Y.; Nan, X. On Edge Detection Algorithms for Water-Repellent Images of Insulators Taking into Account Efficient Approaches. Symmetry 2023, 15, 1418. https://doi.org/10.3390/sym15071418
Ding Y, Nan X. On Edge Detection Algorithms for Water-Repellent Images of Insulators Taking into Account Efficient Approaches. Symmetry. 2023; 15(7):1418. https://doi.org/10.3390/sym15071418
Chicago/Turabian StyleDing, Yizhuo, and Xiaofei Nan. 2023. "On Edge Detection Algorithms for Water-Repellent Images of Insulators Taking into Account Efficient Approaches" Symmetry 15, no. 7: 1418. https://doi.org/10.3390/sym15071418