

Newton-like Polynomial-Coded Distributed Computing for Numerical Stability
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
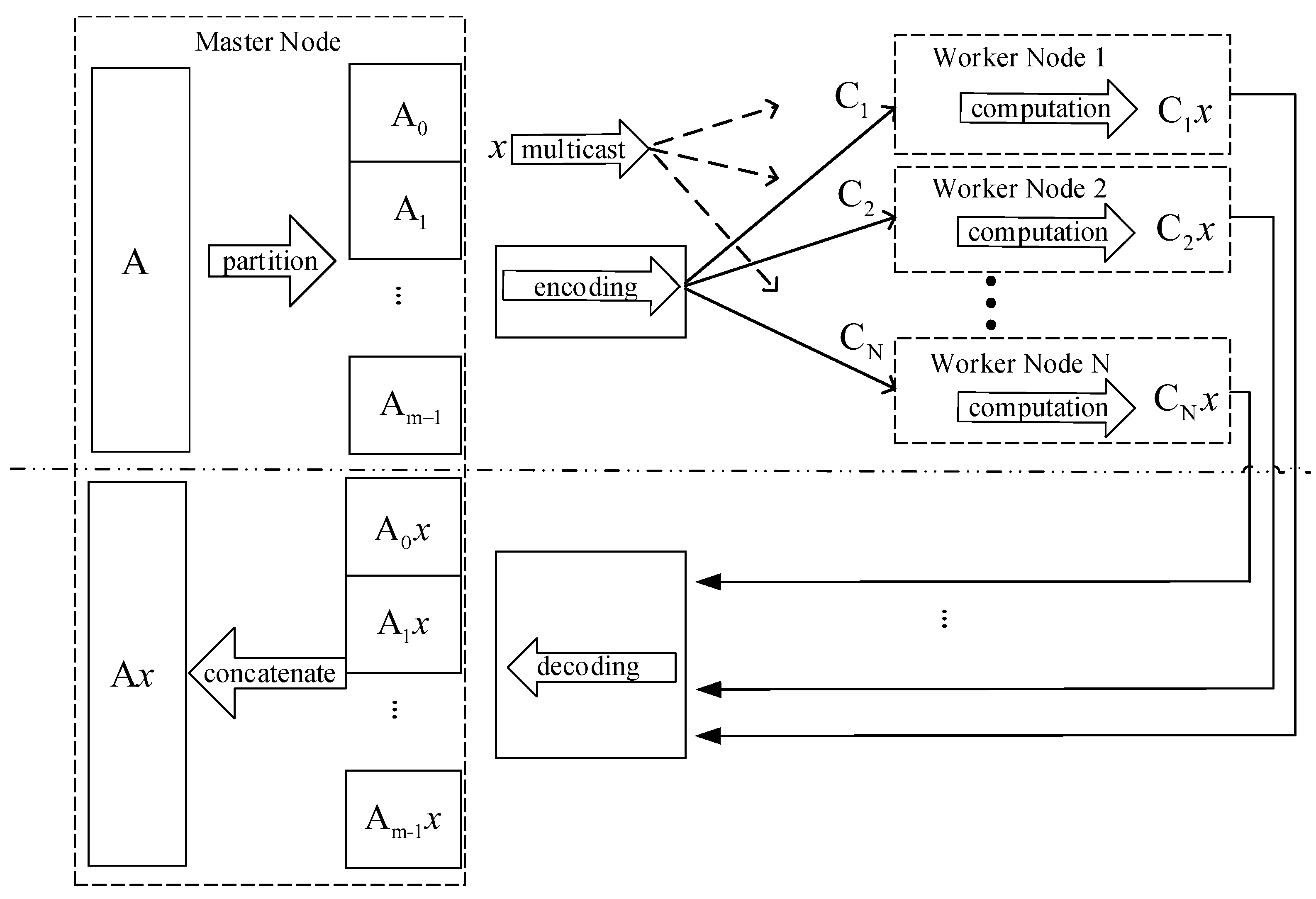
2.1. Matrix–Vector Multiplication within the CDC Framework
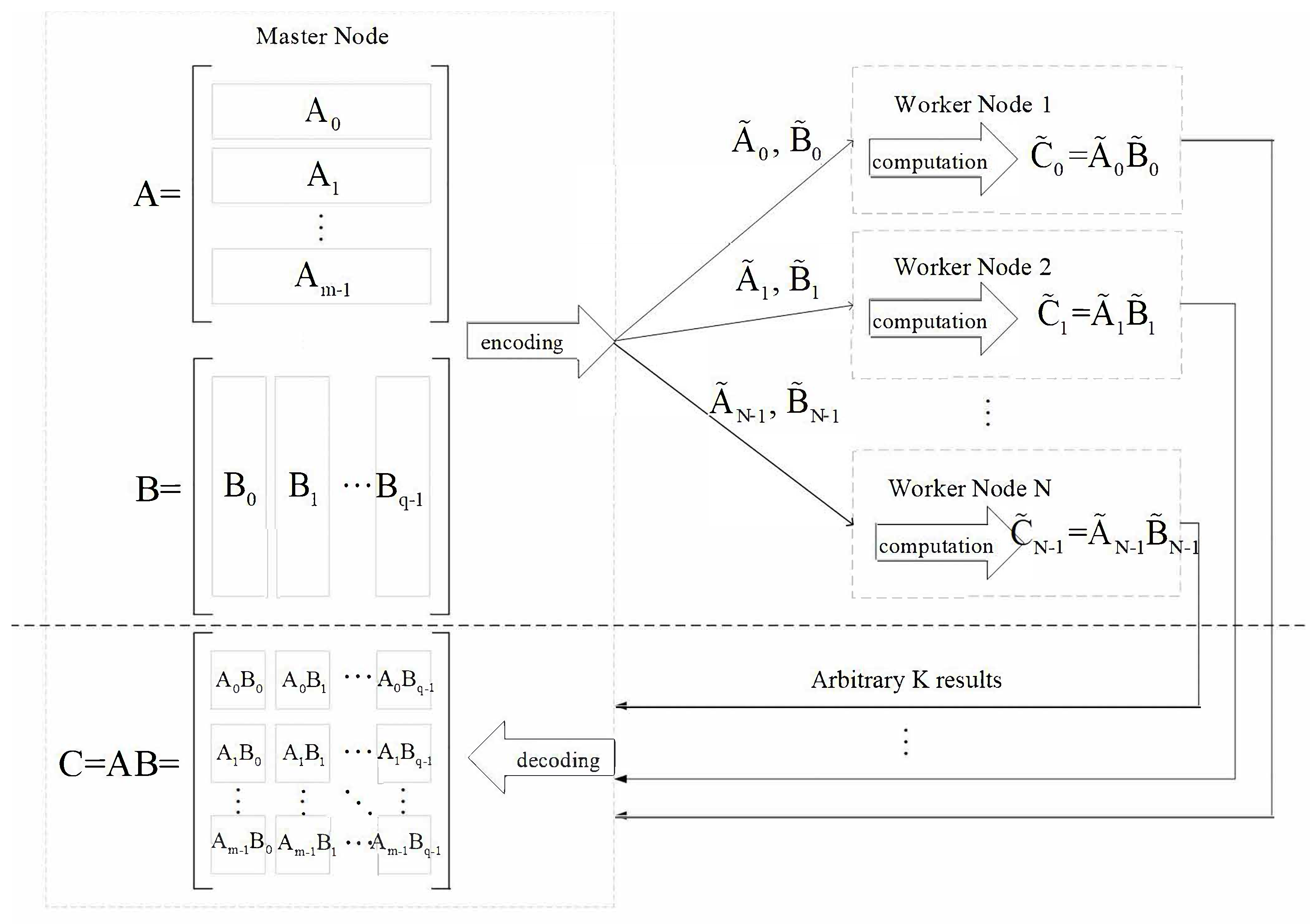
2.2. Matrix–Matrix Multiplication within the CDC Framework
2.3. Newton Interpolation Polynomial (NIP) Encoding
3. Proposed NLPC-Based CDC (NLPC-CDC)
3.1. NLPC-CDC for Matrix–Vector Multiplication
3.2. NLPC-CDC for Matrix–Matrix Multiplication
4. Numerical Study
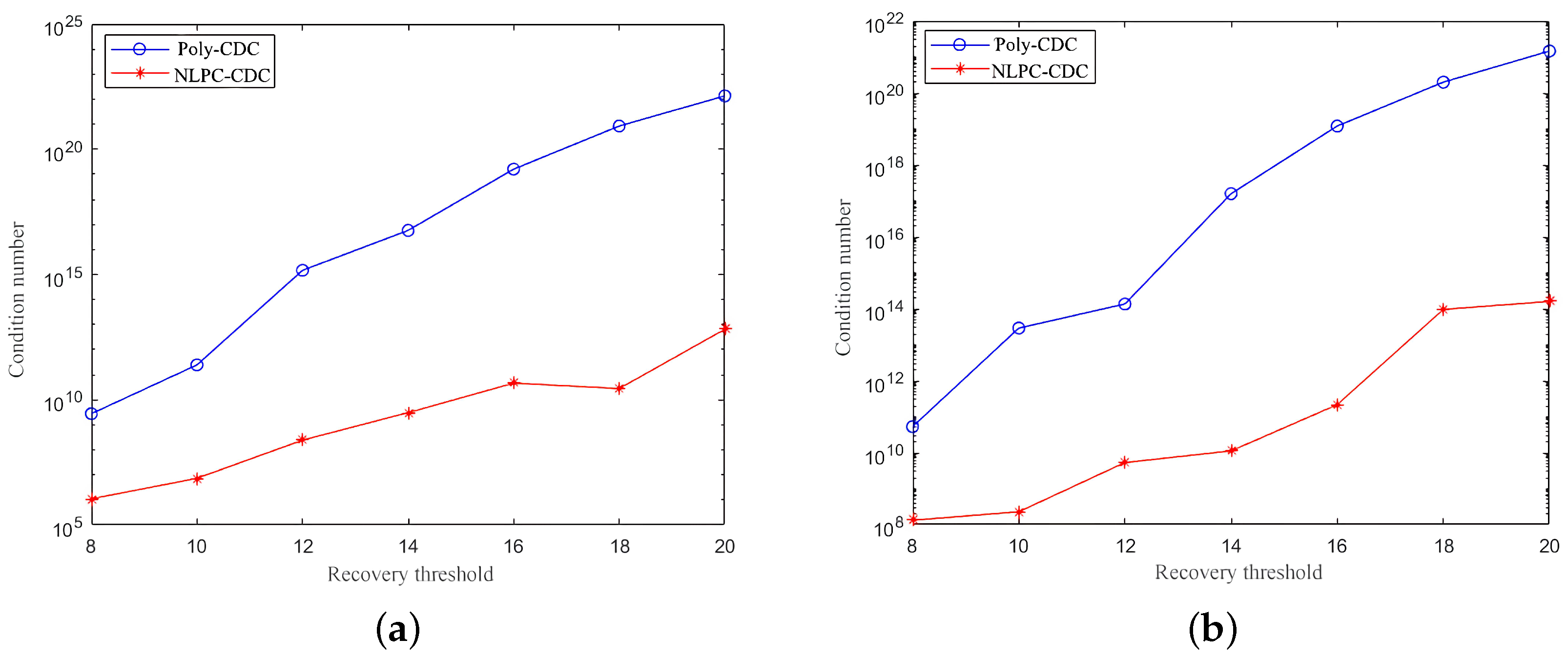
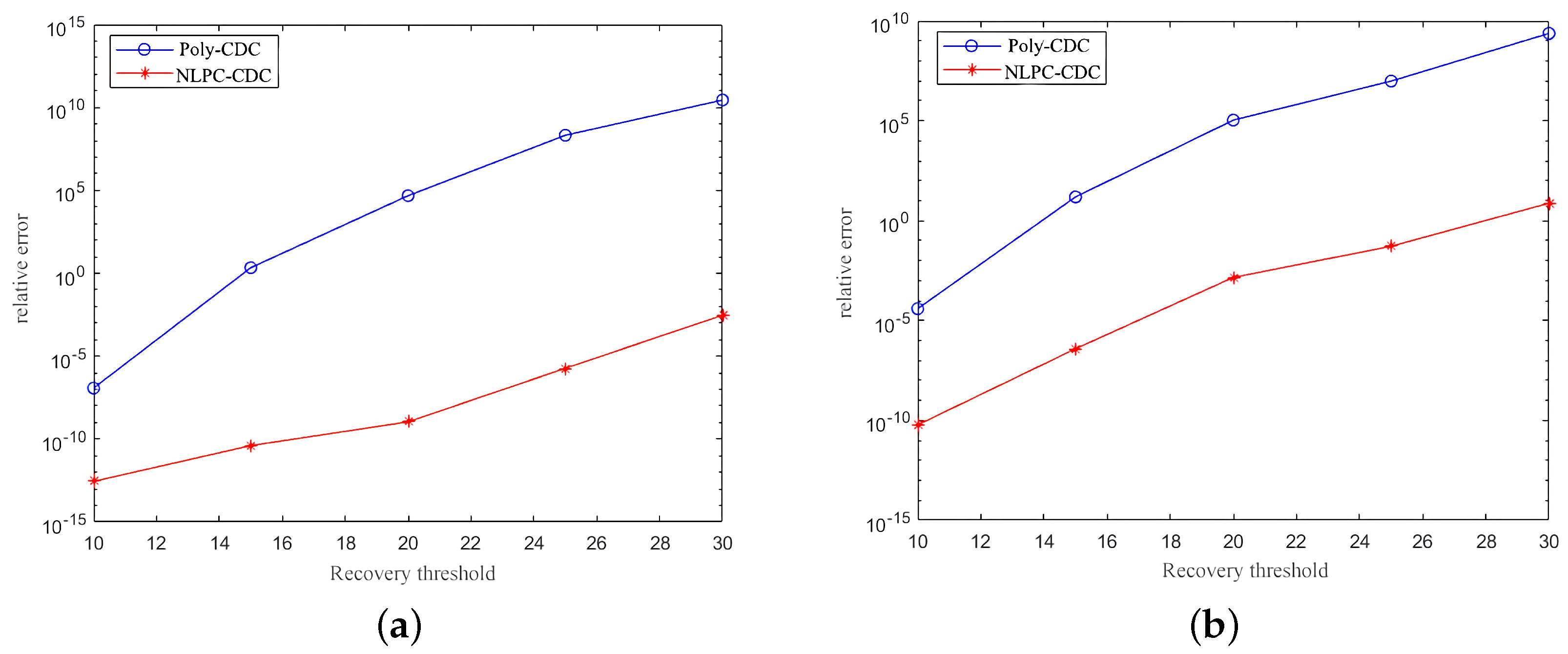
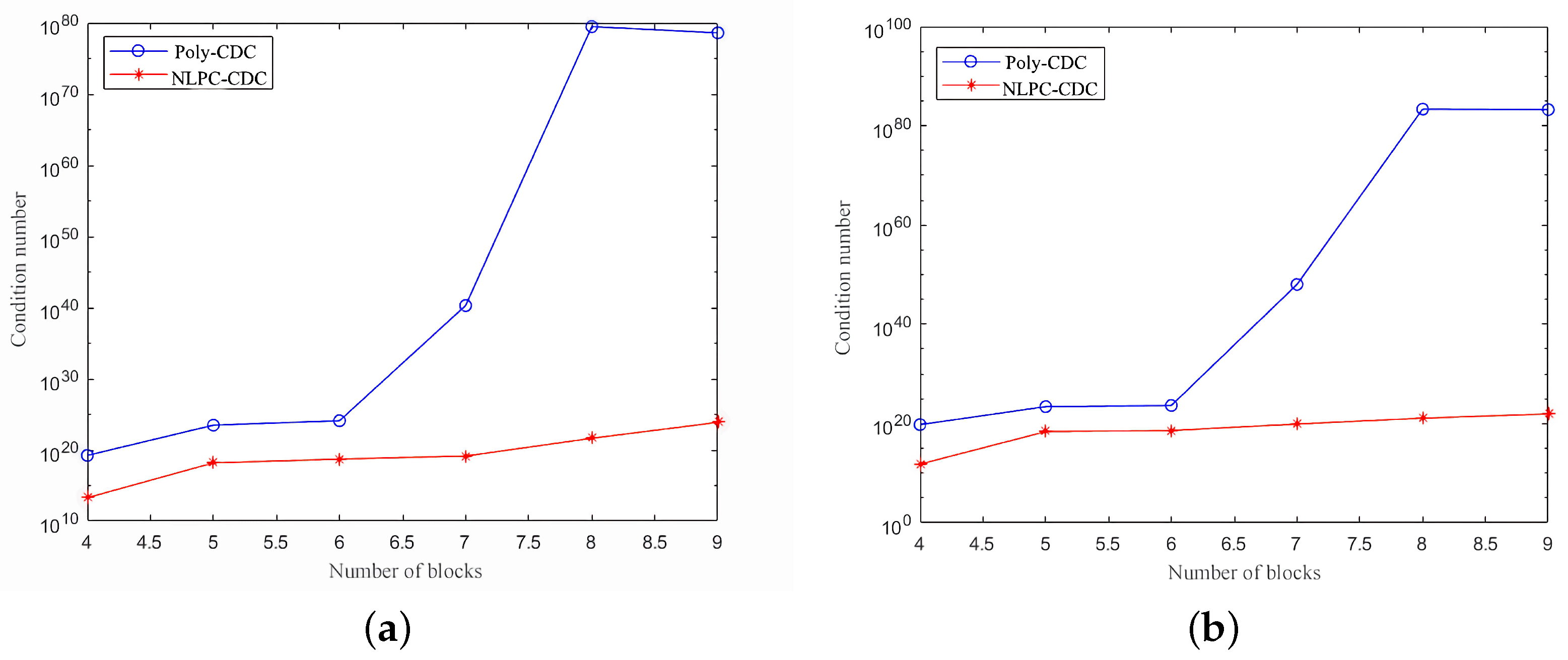
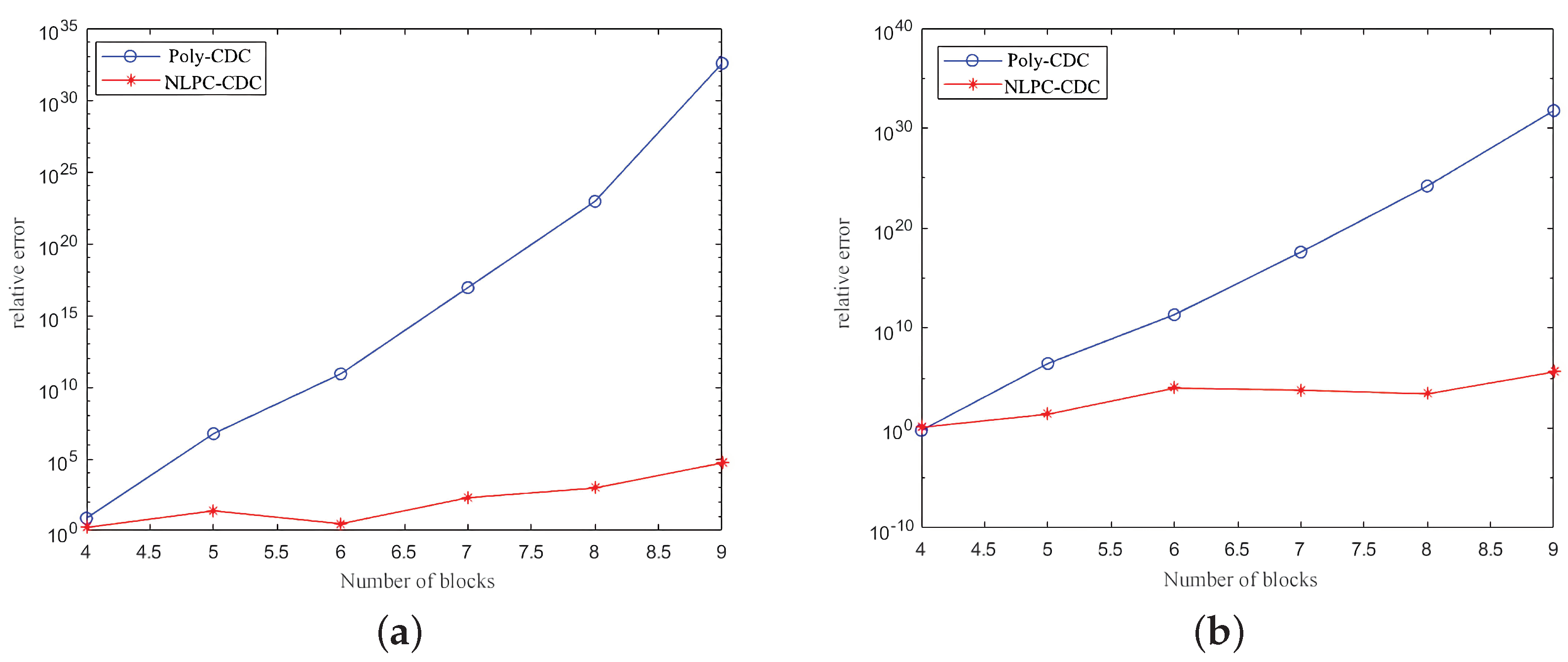
4.1. Matrix–Vector Multiplication
4.2. Matrix–Matrix Multiplication
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
- (1)
- We first consider the case where . In this case, determinant . Therefore, is non-zero, and hence we prove the determinant is non-zero.
- (2)
- We assume that the determinant is non-zero for an arbitrary Newton-interpolation matrix, namelywhere takes actual values at random from . We let Q denote the above matrix within the determinant.
- (3)
- We prove that the determinant of an arbitrary Newton-interpolation matrix is non-zero.
References
- Fan, M.; Hong, C.; Yingke, L. Blind Recognition of Forward Error Correction Codes Based on a Depth Distribution Algorithm. Symmetry 2021, 13, 1094. [Google Scholar] [CrossRef]
- Abbas, N.; Zhang, Y.; Taherkordi, A. Mobile edge computing: A survey. IEEE Internet Things J. 2017, 5, 450–465. [Google Scholar] [CrossRef] [Green Version]
- Shi, W.; Cao, J.; Zhang, Q. Edge Computing: Vision and Challenges. IEEE Internet Things J. 2016, 3, 637–646. [Google Scholar] [CrossRef]
- Zhu, H.; Luan, T.H.; Dong, M. Guest editorial: Fog computing on wheels. Peer-Peer Netw. Appl. 2018, 11, 735–737. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Zhou, J.; Liu, A. Fog-Based Computing and Storage Offloading for Data Synchronization in IoT. IEEE Internet Things J. 2018, 6, 4272–4282. [Google Scholar] [CrossRef]
- Sisinni, E.; Saifullah, A.; Han, S. Industrial internet of things: Challenges, opportunities, and directions. IEEE Internet Things J. 2018, 14, 4724–4734. [Google Scholar] [CrossRef]
- Pokamestov, D. Adaptation of Signal with NOMA and Polar Codes to the Rayleigh Channel. Symmetry 2022, 14, 2103. [Google Scholar] [CrossRef]
- Shen, X.; Gao, J.; Wu, W.; Li, M.; Zhou, C.; Zhuang, W. Holistic network intelligence for 6G. IEEE Commun. Surv. Tutotrials 2022, 24, 1–30. [Google Scholar] [CrossRef]
- Li, J.; Dang, S.; Huang, Y.; Chen, P.; Qi, X.; Wen, M. Composite multiple-mode orthogonal frequency division multiplexing with index modulation. IEEE Trans. Wirel. Commun. 2022, 22, 3748–3761. [Google Scholar] [CrossRef]
- Li, J.; Dang, S.; Wen, M.; Li, Q.; Chen, Y.; Huang, Y. Index Modulation Multiple Access for 6G Communications: Principles, Applications, and Challenges. IEEE Netw. 2023, 37, 52–60. [Google Scholar] [CrossRef]
- Liu, N.; Li, K.; Tao, M. Code design and latency analysis of distributed matrix multiplication with straggling servers in fading channels. China Commun. 2021, 18, 15–29. [Google Scholar] [CrossRef]
- Shin, D.-J.; Kim, J.-J. Cache-Based Matrix Technology for Efficient Write and Recovery in Erasure Coding Distributed File Systems. Symmetry 2023, 15, 872. [Google Scholar] [CrossRef]
- Dean, J.; Barroso, L.A. The tail at scale. Commun. ACM 2013, 56, 74–80. [Google Scholar] [CrossRef]
- Herault, T.; Hoarau, W. FAIL-MPI: How fault-tolerant is fault-tolerant MPI? In Proceedings of the IEEE International Conference on Cluster Computing, Barcelona, Spain, 25–28 September 2006. [Google Scholar]
- Dai, M. SAZD: A low computational load coded distributed computing framework for IoT systems. IEEE Internet Things J. 2020, 7, 3640–3649. [Google Scholar] [CrossRef]
- Yu, Q.; Maddah-Ali, M.A.; Avestimehr, A.S. Polynomial Codes: An Optimal Design for High-Dimensional Coded Matrix Multiplication. Adv. Neural Inf. Process. Syst. 2017, 30, 1–11. [Google Scholar]
- Hasırcıoğlu, B.; Gómez-Vilardebó, J.; Gündüz, D. Bivariate Hermitian Polynomial Coding for Efficient Distributed Matrix Multiplication. In Proceedings of the IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar]
- Hasırcıoğlu, B.; Gómez-Vilardebó, J.; Gündüz, D. Bivariate Polynomial Coding for Efficient Distributed Matrix Multiplication. IEEE J. Sel. Areas Inf. Theory 2021, 2, 814–829. [Google Scholar] [CrossRef]
- Gautschi, W.; Inglese, G. Lower bounds for the condition number of vandermonde matrices. Numer. Math. 1987, 52, 241–250. [Google Scholar] [CrossRef]
- Gautschi, W. How (un) stable are vandermonde systems. Asymptot. Comput. Anal. 1990, 124, 193–210. [Google Scholar]
- Reichel, L.; Opfer, G. Chebyshev-vandermonde systems. Math. Comput. 1991, 57, 703–721. [Google Scholar] [CrossRef]
- Shen, X.; Gao, J.; Wu, W. AI-assisted network-slicing based next-generation wireless networks. IEEE Open J. Veh. Technol. 2020, 1, 45–66. [Google Scholar] [CrossRef]
- Quarteroni, A.; Sacco, R.; Saleri, F. Numerical Mathematics; Springer: Berlin/Heidelberg, Germany, 2010; Volume 37. [Google Scholar]
- Trefethen, L.N. Approximation Theory and Approximation Practice; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2013; Volume 128. [Google Scholar]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, M.; Lai, X.; Tong, Y.; Li, B. Newton-like Polynomial-Coded Distributed Computing for Numerical Stability. Symmetry 2023, 15, 1372. https://doi.org/10.3390/sym15071372
Dai M, Lai X, Tong Y, Li B. Newton-like Polynomial-Coded Distributed Computing for Numerical Stability. Symmetry. 2023; 15(7):1372. https://doi.org/10.3390/sym15071372
Chicago/Turabian StyleDai, Mingjun, Xiong Lai, Yanli Tong, and Bingchun Li. 2023. "Newton-like Polynomial-Coded Distributed Computing for Numerical Stability" Symmetry 15, no. 7: 1372. https://doi.org/10.3390/sym15071372