
Solving Fractional Order Differential Equations by Using Fractional Radial Basis Function Neural Network



Abstract
:1. Introduction
2. Preliminaries
2.1. Fractional Derivative Definition
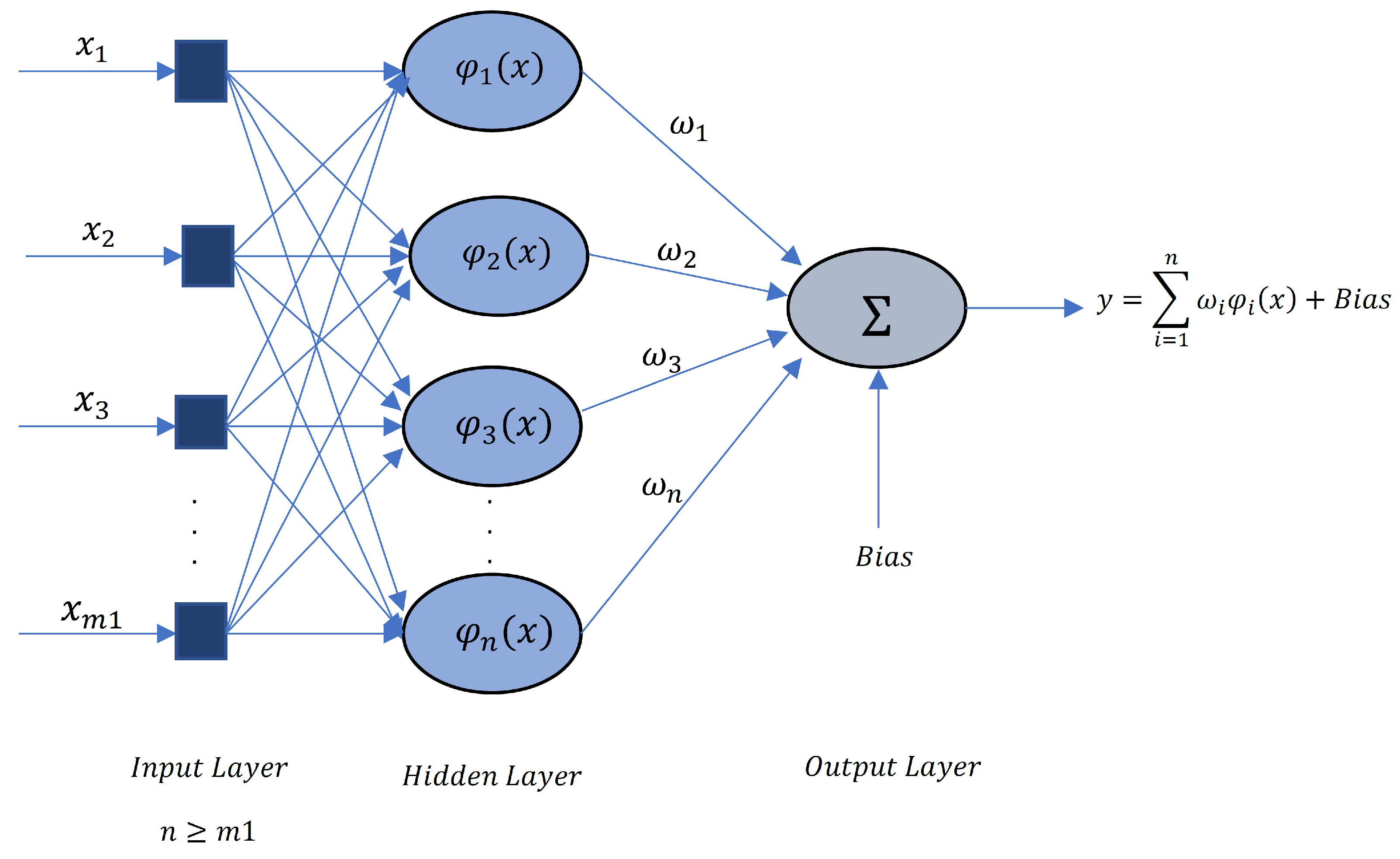
2.2. Structure of RBF-Neural Network
- The input layer
- The hidden layer includes radial basis functions:
- The output layer consists of linear neurons:
3. Description of the Method
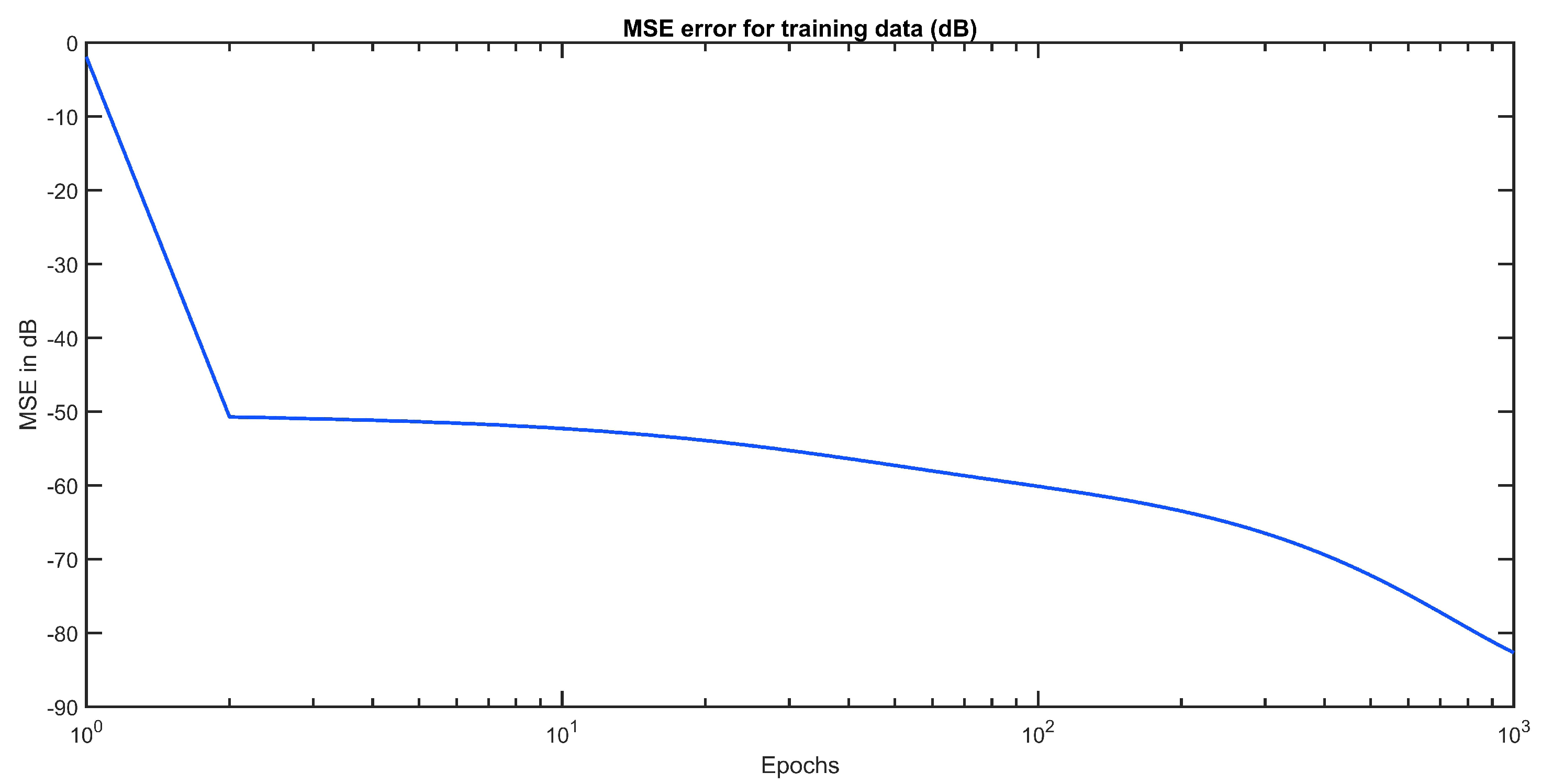
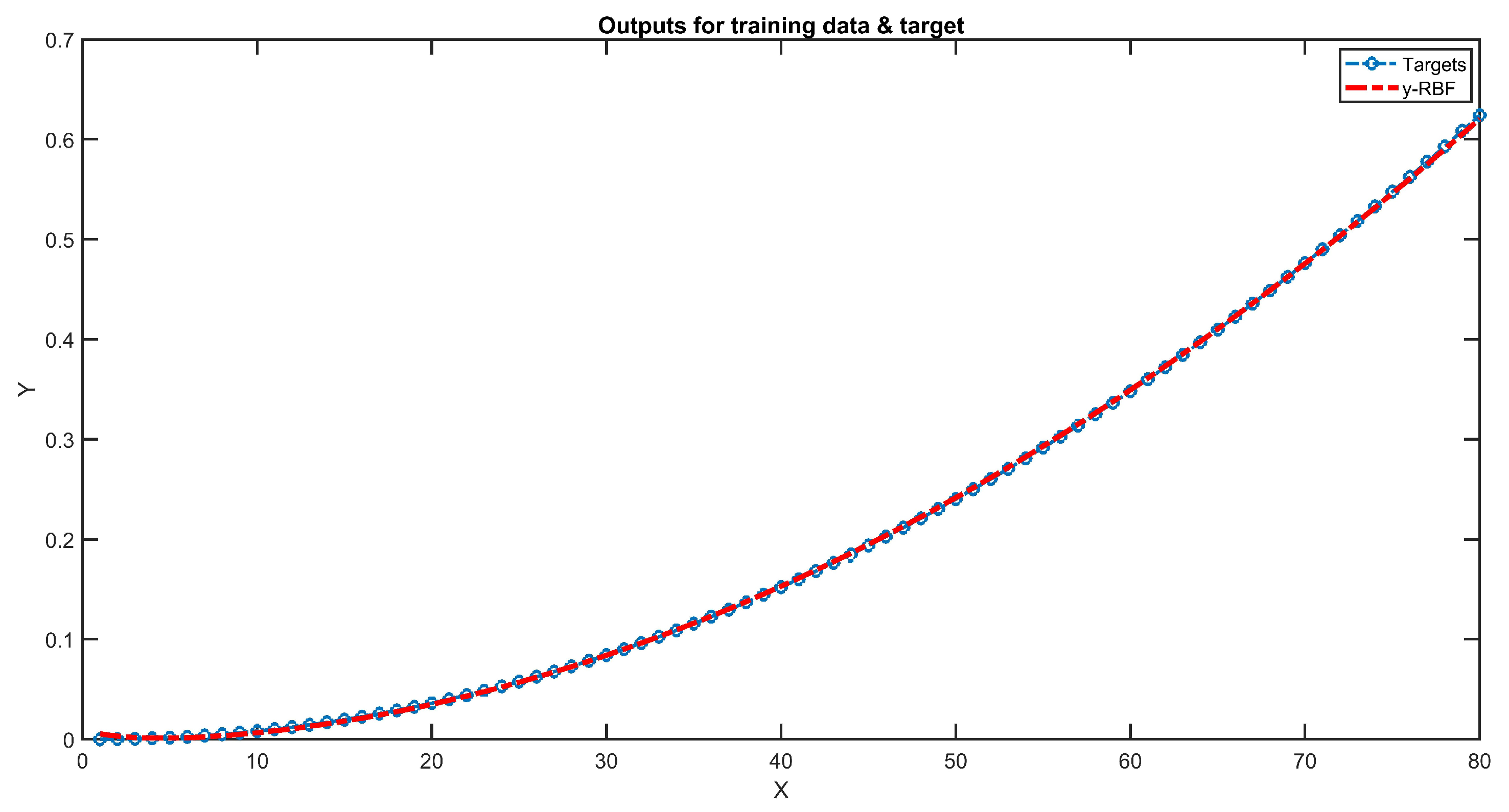
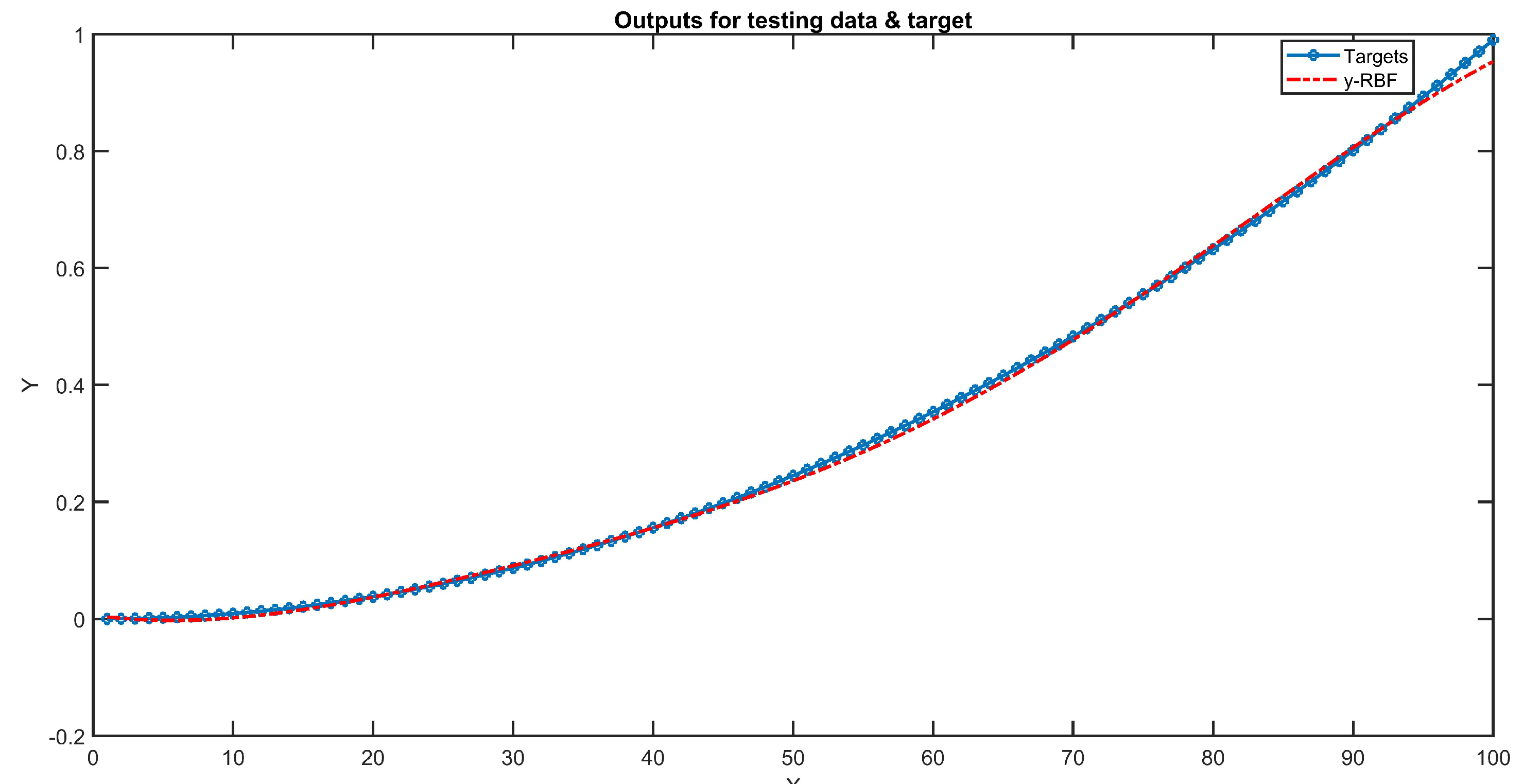
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sabatier, J.; Agrawal, O.P.; Machado, J.T. Advances in Fractional Calculus; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4. [Google Scholar]
- Uchaikin, V.V. Fractional Derivatives for Physicists and Engineers; Springer: Berlin/Heidelberg, Germany, 2013; Volume 2. [Google Scholar]
- Uchaĭkin, V.V.; Sibatov, R. Fractional Kinetics in Solids: Anomalous Charge Transport in Semiconductors, Dielectrics, and Nanosystems; World Scientific: Singapore, 2013. [Google Scholar]
- Teka, W.; Marinov, T.M.; Santamaria, F. Neuronal spike timing adaptation described with a fractional leaky integrate-and-fire model. PLoS Comput. Biol. 2014, 10, e1003526. [Google Scholar] [CrossRef] [PubMed]
- Qiao, L.; Qiu, W.; Xu, D. Error analysis of fast L1 ADI finite difference/compact difference schemes for the fractional telegraph equation in three dimensions. Math. Comput. Simul. 2023, 205, 205–231. [Google Scholar] [CrossRef]
- Qiao, L.; Guo, J.; Qiu, W. Fast BDF2 ADI methods for the multi-dimensional tempered fractional integrodifferential equation of parabolic type. Comput. Math. Appl. 2022, 123, 89–104. [Google Scholar] [CrossRef]
- Qiu, W.; Xu, D.; Yang, X.; Zhang, H. The efficient ADI Galerkin finite element methods for the three-dimensional nonlocal evolution problem arising in viscoelastic mechanics. Discret. Contin. Dyn. Syst. B 2023, 28, 3079–3106. [Google Scholar] [CrossRef]
- AlAhmad, R.; AlAhmad, Q.; Abdelhadi, A. Solution of fractional autonomous ordinary differential equations. J. Math. Comput. Sci. 2020, 27, 59–64. [Google Scholar] [CrossRef]
- Jassim, H.K.; Shareef, M. On approximate solutions for fractional system of differential equations with Caputo-Fabrizio fractional operator. J. Math. Comput. Sci. 2021, 23, 58–66. [Google Scholar] [CrossRef]
- Abu-Rqayiq, A.; Zannon, M. On Dynamics of Fractional Order Oncolytic Virotherapy Models. J. Math. Comput. Sci. 2020, 20, 79–87. [Google Scholar] [CrossRef] [Green Version]
- Akram, T.; Abbas, M.; Ali, A. A numerical study on time fractional Fisher equation using an extended cubic B-spline approximation. J. Math. Comput. Sci. 2021, 22, 85–96. [Google Scholar] [CrossRef]
- Luo, M.; Qiu, W.; Nikan, O.; Avazzadeh, Z. Second-order accurate, robust and efficient ADI Galerkin technique for the three-dimensional nonlocal heat model arising in viscoelasticity. Appl. Math. Comput. 2023, 440, 127655. [Google Scholar] [CrossRef]
- Can, N.H.; Nikan, O.; Rasoulizadeh, M.N.; Jafari, H.; Gasimov, Y.S. Numerical computation of the time non-linear fractional generalized equal width model arising in shallow water channel. Therm. Sci. 2020, 24, 49–58. [Google Scholar] [CrossRef]
- Nikan, O.; Molavi-Arabshai, S.M.; Jafari, H. Numerical simulation of the nonlinear fractional regularized long-wave model arising in ion acoustic plasma waves. Discret. Contin. Dyn. Syst. S 2021, 14, 3685. [Google Scholar] [CrossRef]
- Guo, T.; Nikan, O.; Avazzadeh, Z.; Qiu, W. Efficient alternating direction implicit numerical approaches for multi-dimensional distributed-order fractional integro differential problems. Comput. Appl. Math. 2022, 41, 236. [Google Scholar] [CrossRef]
- Ciesielski, M.; Leszczynski, J. Numerical simulations of anomalous diffusion. arXiv 2003, arXiv:math-ph/0309007. [Google Scholar]
- Odibat, Z. Approximations of fractional integrals and Caputo fractional derivatives. Appl. Math. Comput. 2006, 178, 527–533. [Google Scholar] [CrossRef]
- Momani, S.; Odibat, Z. Numerical approach to differential equations of fractional order. J. Comput. Appl. Math. 2007, 207, 96–110. [Google Scholar] [CrossRef] [Green Version]
- Cui, Y.; Sun, Q.; Su, X. Monotone iterative technique for nonlinear boundary value problems of fractional order p ∈ (2,3]. Adv. Differ. Equ. 2017, 2017, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Metzler, R.; Klafter, J. The random walk’s guide to anomalous diffusion: A fractional dynamics approach. Phys. Rep. 2000, 339, 1–77. [Google Scholar] [CrossRef]
- Saadatmandi, A.; Dehghan, M. A new operational matrix for solving fractional-order differential equations. Comput. Math. Appl. 2010, 59, 1326–1336. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Sun, N. Numerical solution of fractional differential equations using the generalized block pulse operational matrix. Comput. Math. Appl. 2011, 62, 1046–1054. [Google Scholar] [CrossRef] [Green Version]
- Demirci, E.; Ozalp, N. A method for solving differential equations of fractional order. J. Comput. Appl. Math. 2012, 236, 2754–2762. [Google Scholar] [CrossRef] [Green Version]
- Mall, S.; Chakraverty, S. Application of Legendre neural network for solving ordinary differential equations. Appl. Soft Comput. 2016, 43, 347–356. [Google Scholar] [CrossRef]
- Mall, S.; Chakraverty, S. Chebyshev neural network based model for solving Lane–Emden type equations. Appl. Math. Comput. 2014, 247, 100–114. [Google Scholar] [CrossRef]
- Chakraverty, S.; Mall, S. Regression-based weight generation algorithm in neural network for solution of initial and boundary value problems. Neural Comput. Appl. 2014, 25, 585–594. [Google Scholar] [CrossRef]
- Lagaris, I.E.; Likas, A.; Fotiadis, D.I. Artificial neural networks for solving ordinary and partial differential equations. IEEE Trans. Neural Netw. 1998, 9, 987–1000. [Google Scholar] [CrossRef] [Green Version]
- Pakdaman, M.; Ahmadian, A.; Effati, S.; Salahshour, S.; Baleanu, D. Solving differential equations of fractional order using an optimization technique based on training artificial neural network. Appl. Math. Comput. 2017, 293, 81–95. [Google Scholar] [CrossRef]
- Pang, G.; Lu, L.; Karniadakis, G.E. fPINNs: Fractional physics-informed neural networks. SIAM J. Sci. Comput. 2019, 41, A2603–A2626. [Google Scholar] [CrossRef] [Green Version]
- Jafarian, A.; Rostami, F.; Golmankhaneh, A.K.; Baleanu, D. Using ANNs approach for solving fractional order Volterra integro-differential equations blue. Int. J. Comput. Intell. Syst. 2017, 10, 470–480. [Google Scholar]
- Qu, H.; She, Z.; Liu, X. Neural network method for solving fractional diffusion equations. Appl. Math. Comput. 2021, 391, 125635. [Google Scholar] [CrossRef]
- Qu, H.; Liu, X. A numerical method for solving fractional differential equations by using neural network. Adv. Math. Phys. 2015, 2015, 439526. [Google Scholar] [CrossRef] [Green Version]
- Jumarie, G. Modified Riemann-Liouville derivative and fractional Taylor series of nondifferentiable functions further results. Comput. Math. Appl. 2006, 51, 1367–1376. [Google Scholar] [CrossRef] [Green Version]
- Haykin, S.; Network, N. A comprehensive foundation. Neural Netw. 2004, 2, 41. [Google Scholar]
- Wettschereck, D.; Dietterich, T. Improving the performance of radial basis function networks by learning center locations. Adv. Neural Inf. Process. Syst. 1991, 4, 1133–1140. [Google Scholar]
- Kleinz, M.; Osler, T.J. A child’s garden of fractional derivatives. Coll. Math. J. 2000, 31, 82–88. [Google Scholar] [CrossRef]
- Khan, S.; Naseem, I.; Malik, M.A.; Togneri, R.; Bennamoun, M. A fractional gradient descent-based RBF neural network. Circuits Syst. Signal Process. 2018, 37, 5311–5332. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Kernels | MSE (Training) | MSE (Testing) | Approximation Accuracy | |
|---|---|---|---|---|
| 0.01 | 35 | 99.40% | ||
| 0.001 | 70 | 99.66% |
| t | x = y | Number of Kernels | MSE (Training) | MSE (Testing) | Approximation Accuracy |
|---|---|---|---|---|---|
| 0.1 | 0.1 | 150 | 99.40% | ||
| 0.05 | 0.05 | 400 | 99.75% |
| t | x | Number of Kernels | MSE (Training) | MSE (Testing) | Approximation Accuracy |
|---|---|---|---|---|---|
| 0.01 | 0.01 | 120 | 99.44% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Javadi, R.; Mesgarani, H.; Nikan, O.; Avazzadeh, Z. Solving Fractional Order Differential Equations by Using Fractional Radial Basis Function Neural Network. Symmetry 2023, 15, 1275. https://doi.org/10.3390/sym15061275
Javadi R, Mesgarani H, Nikan O, Avazzadeh Z. Solving Fractional Order Differential Equations by Using Fractional Radial Basis Function Neural Network. Symmetry. 2023; 15(6):1275. https://doi.org/10.3390/sym15061275
Chicago/Turabian StyleJavadi, Rana, Hamid Mesgarani, Omid Nikan, and Zakieh Avazzadeh. 2023. "Solving Fractional Order Differential Equations by Using Fractional Radial Basis Function Neural Network" Symmetry 15, no. 6: 1275. https://doi.org/10.3390/sym15061275