
Variable Step Size Methods of the Hybrid Affine Projection Adaptive Filtering Algorithm under Symmetrical Non-Gaussian Noise
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Related Algorithms
2.1. Hybrid Affine Projection Algorithm (H-APA)
2.2. Two Variable Step-Size Methods of APSA
2.2.1. Variable Step-Size Affine Projection Sign Algorithm (VSS-APSA)
2.2.2. Modified Variable Step-Size Affine Projection Sign Algorithm (MVSS-APSA)
3. The Proposed Algorithms
3.1. Variable Step-Size Hybrid Affine Algorithm (VSS-H-APA)
3.2. Modified Variable Step-Size Hybrid Affine Algorithm (MVSS-H-APA)
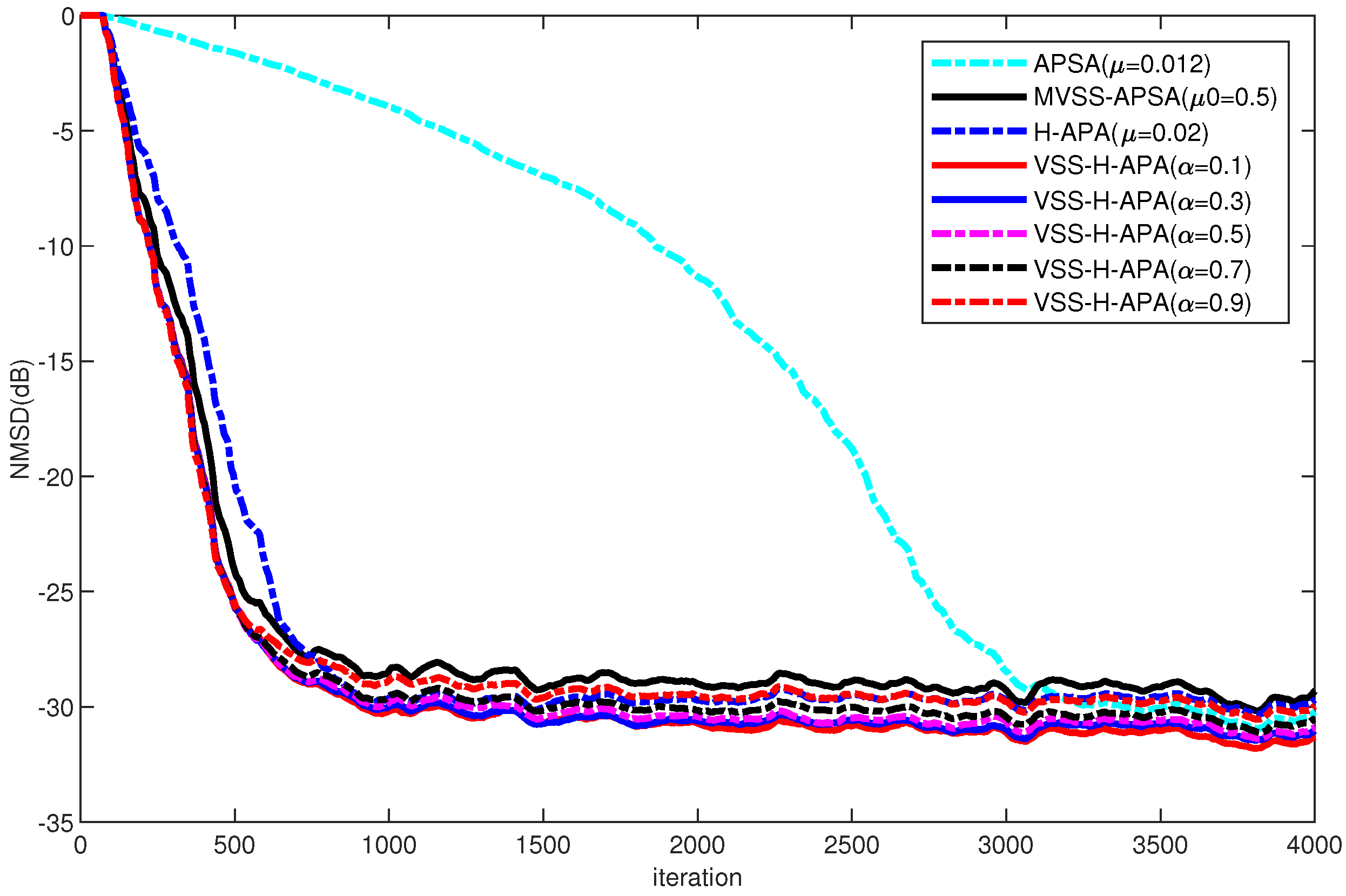
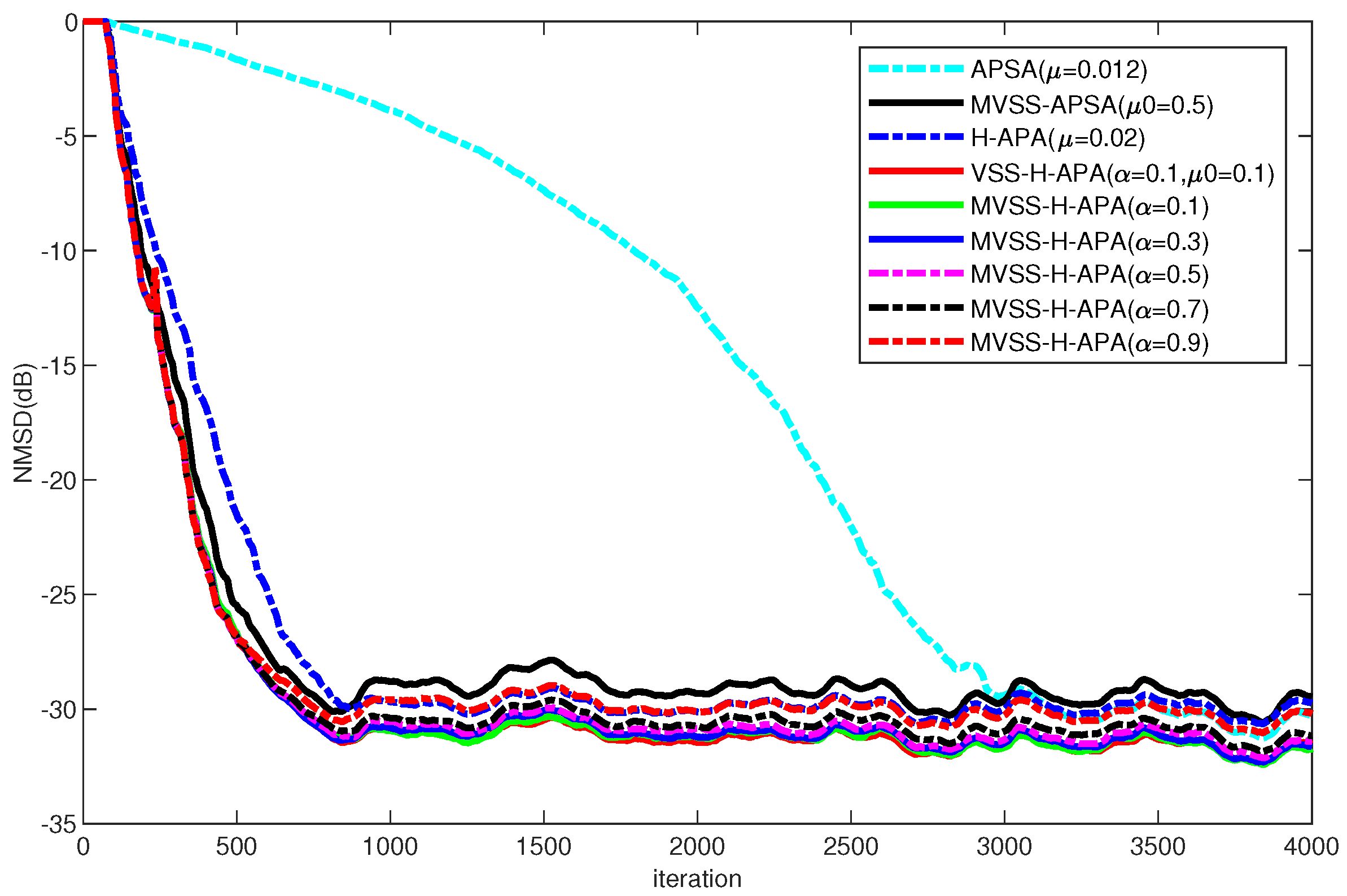
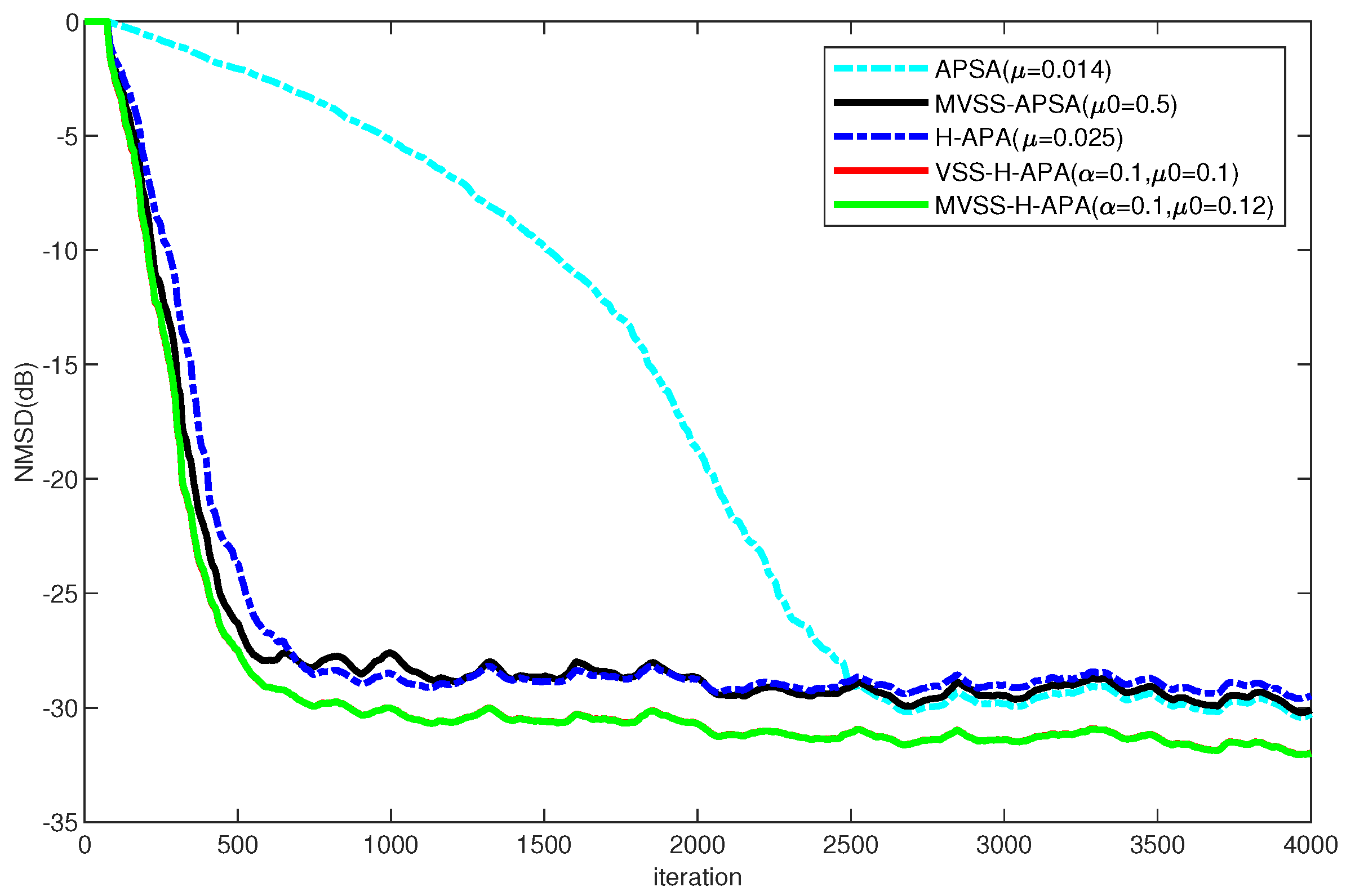
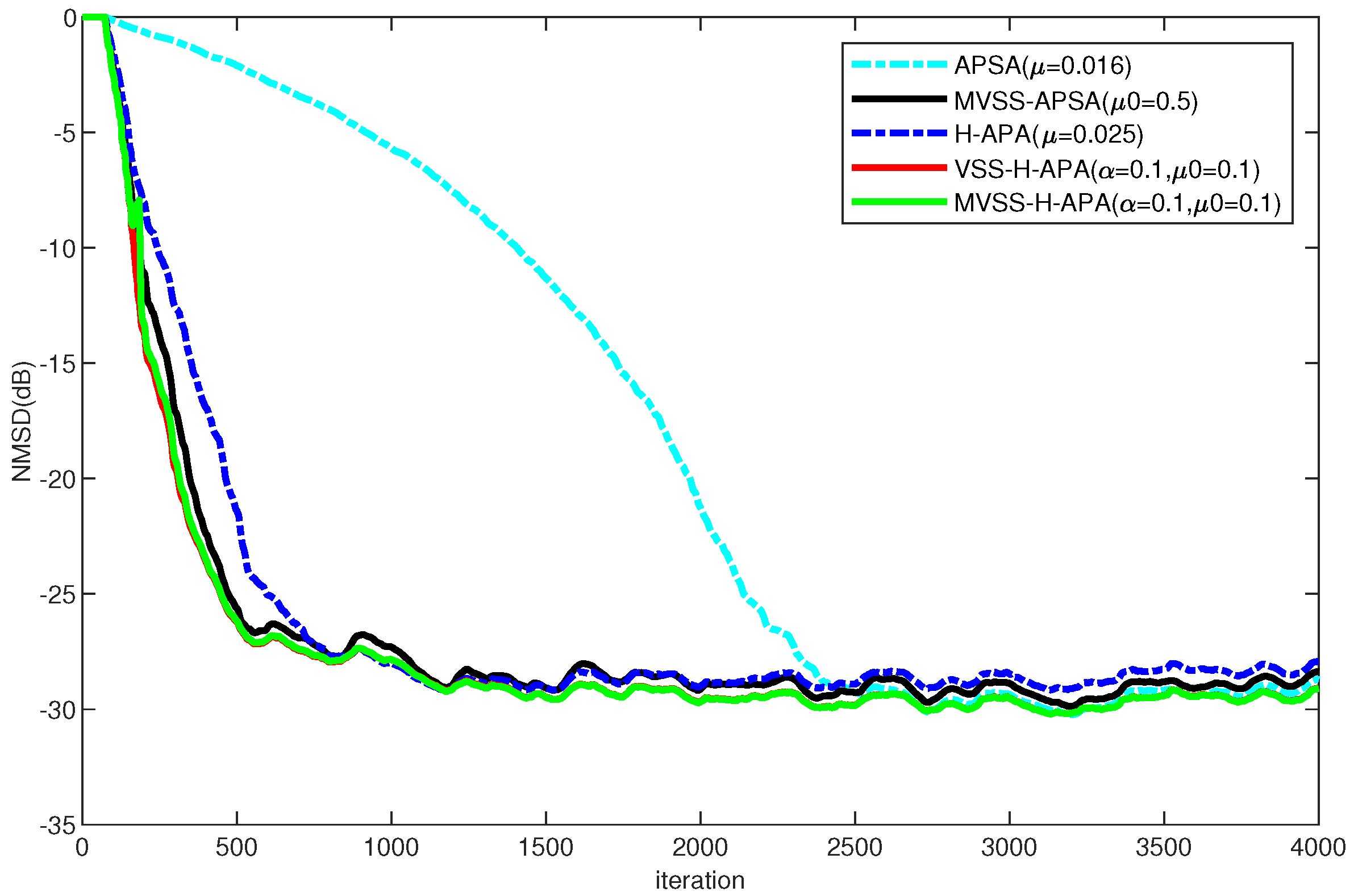
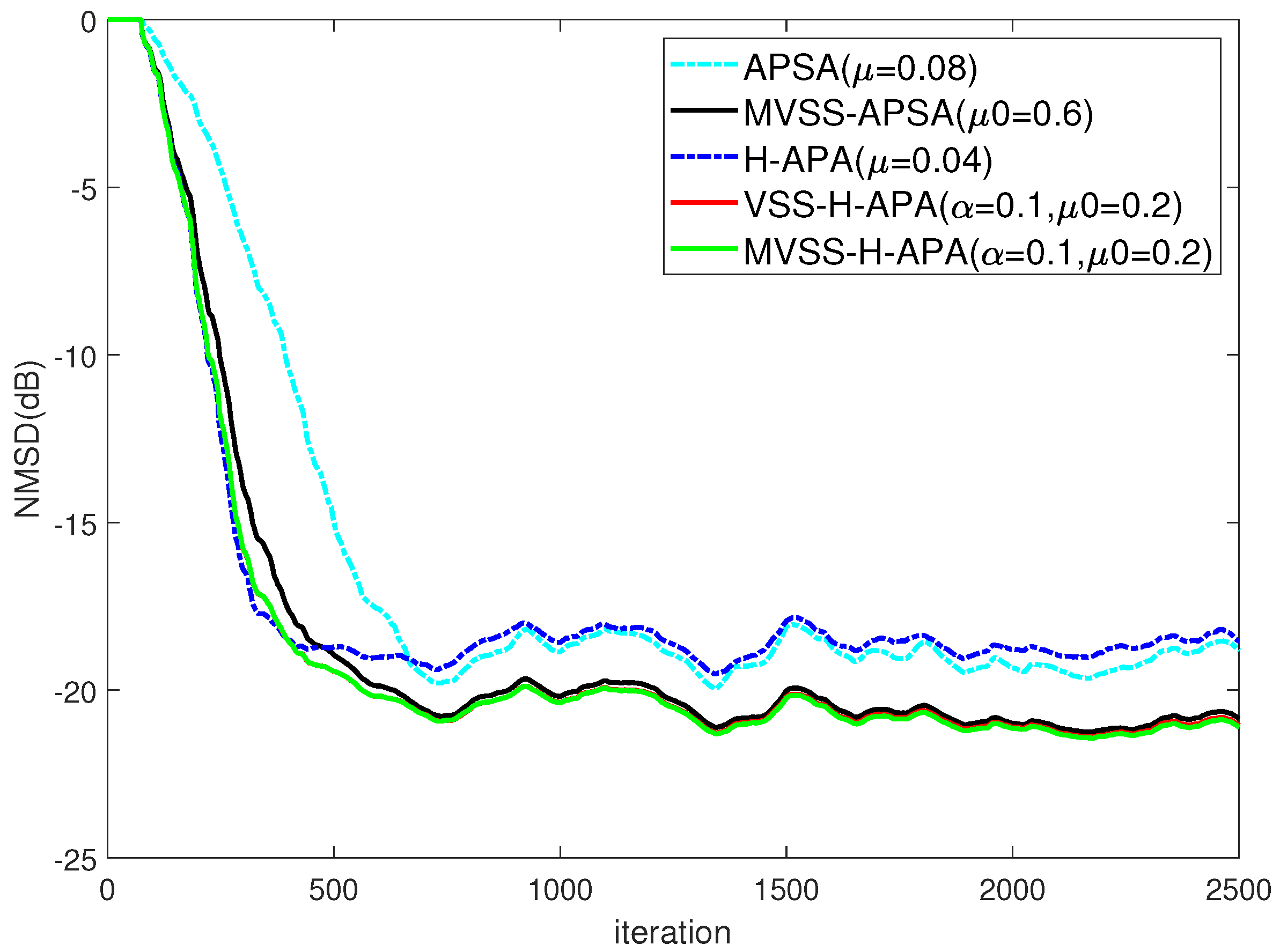
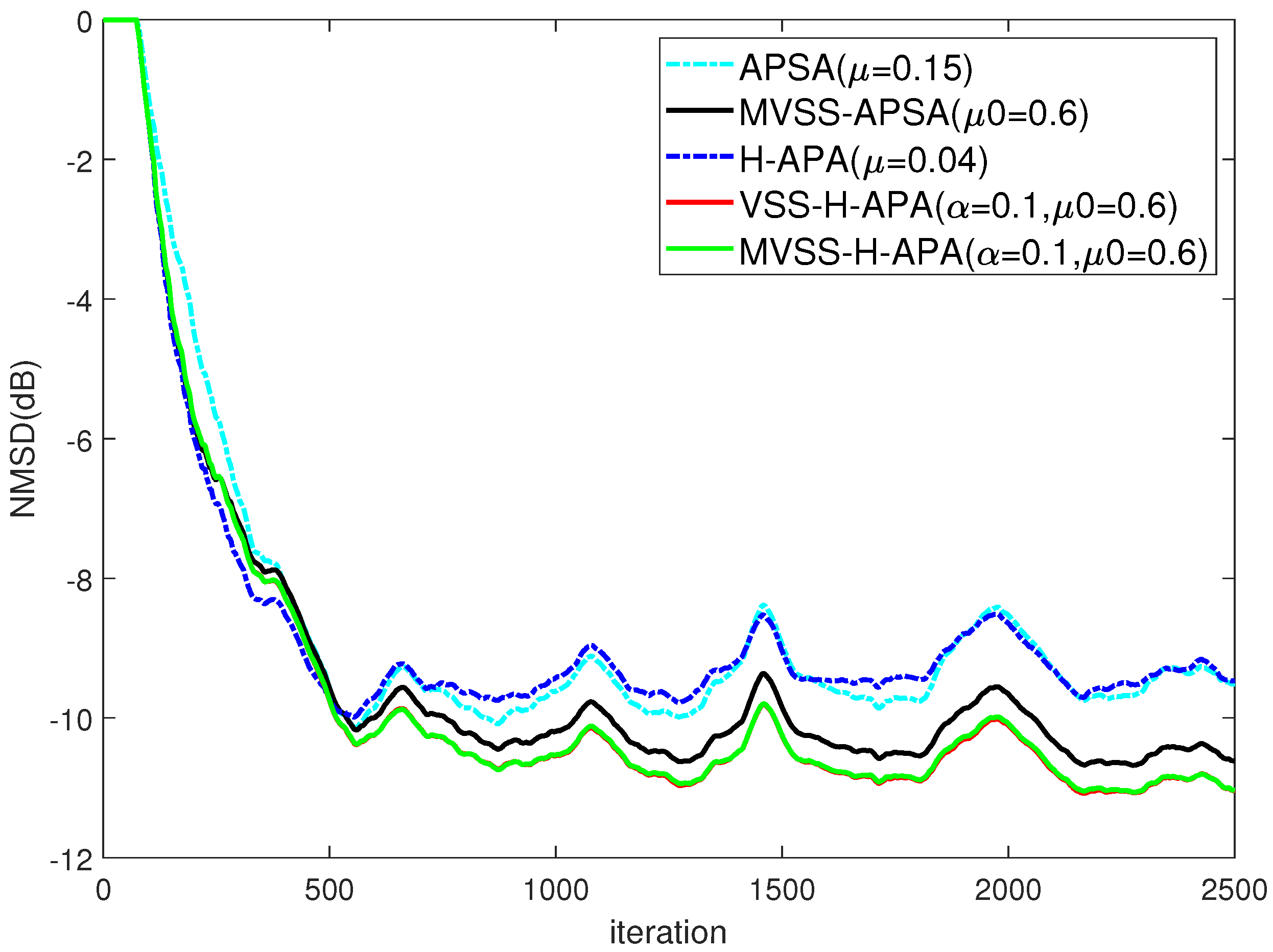
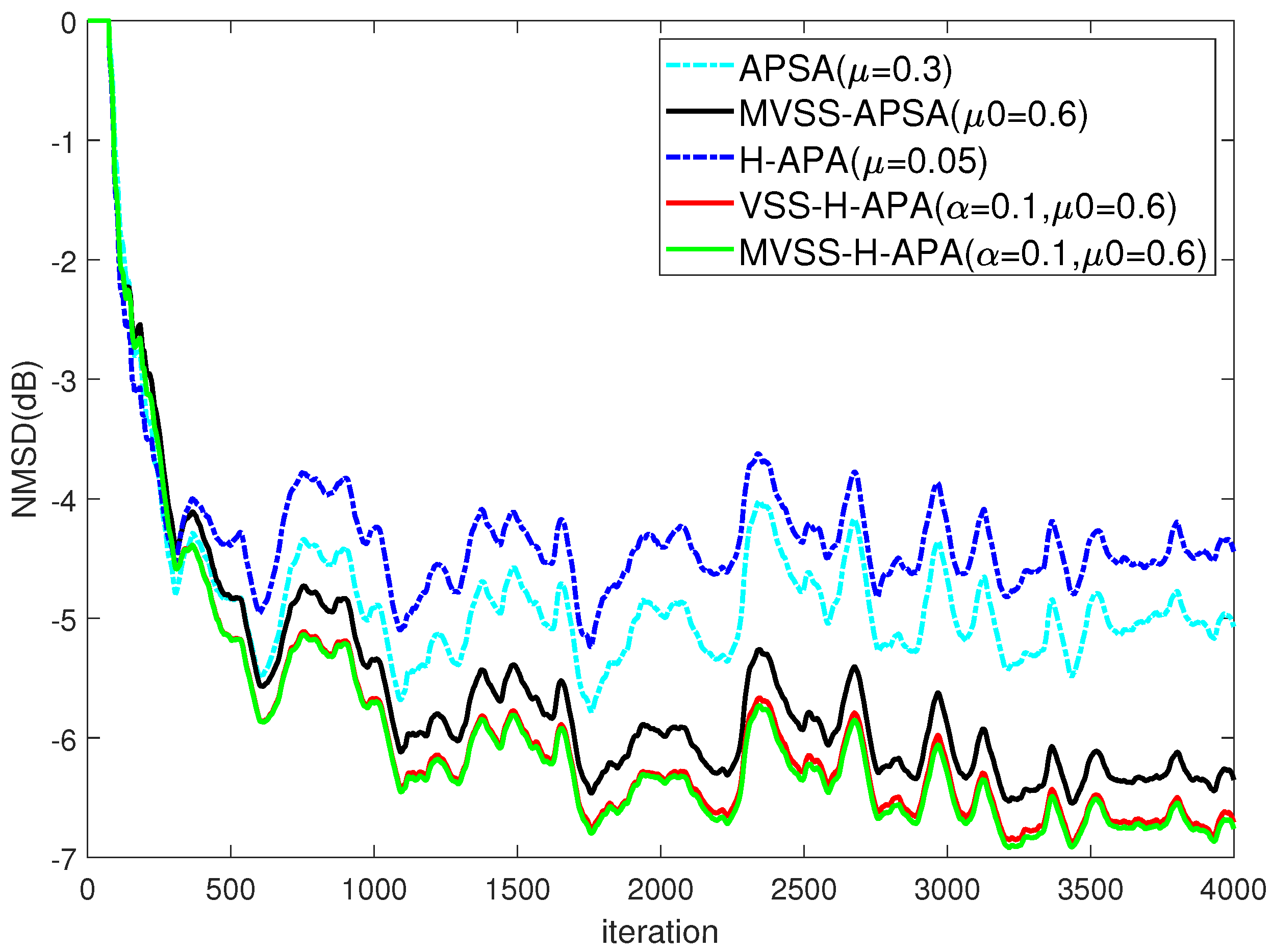
4. Simulation Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ozeki, K.; Umeda, T.; Members, R. An adaptive filtering algorithm using an orthogonal projection to an affine subspace and its properties. Electron. Commun. Jpn. 1984, 67, 126–132. [Google Scholar] [CrossRef]
- Chen, B.; Xing, L.; Zhao, H.; Zheng, N. Generalized Correntropy for Robust Adaptive Filtering. IEEE Trans. Signal Process. 2016, 64, 3376–3387. [Google Scholar] [CrossRef]
- Shao, M.; Nikias, C.L. Signal processing with fractional lower order moments: Stable processes and their applications. Proc. IEEE 1993, 81, 986–1010. [Google Scholar] [CrossRef]
- Shao, T.; Zheng, Y.R.; Benesty, J. An affine projection sign algorithm robust against impulsive interferences. IEEE Signal Process. Lett. 2010, 17, 327–330. [Google Scholar] [CrossRef]
- Zhou, X.; Li, G.; Wang, Z.; Wang, G.; Zhang, H. Robust hybrid affine projection filtering algorithm under α-stable environment. Signal Process. 2023, 208, 108981. [Google Scholar] [CrossRef]
- Li, G.; Wang, G.; Dai, Y.; Sun, Q.; Yang, X.; Zhang, H. Affine projection mixed-norm algorithms for robust filtering. Signal Process. 2021, 187, 108153. [Google Scholar] [CrossRef]
- Bhattacharjee, S.S.; Kumar, K.; George, N.V. Nearest Kronecker Product Decomposition Based Generalized Maximum Correntropy and Generalized Hyperbolic Secant Robust Adaptive Filters. IEEE Signal Process. Lett. 2020, 27, 1525–1529. [Google Scholar] [CrossRef]
- Kumar, K.; Pandey, R.; Bhattacharjee, S.S.; George, N.V. Exponential Hyperbolic Cosine Robust Adaptive Filters for Audio Signal Processing. IEEE Signal Process. Lett. 2021, 28, 1410–1414. [Google Scholar] [CrossRef]
- Kumar, K.; Karthik, M.L.N.S.; Bhattacharjee, S.S.; George, N.V. Affine Projection Champernowne Algorithm for Robust Adaptive Filtering. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 1947–1951. [Google Scholar] [CrossRef]
- Bhattacharjee, S.S.; Shaikh, M.A.; Kumar, K.; George, N.V. Robust Constrained Generalized Correntropy and Maximum Versoria Criterion Adaptive Filters. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3002–3006. [Google Scholar] [CrossRef]
- Kumar, K.; Bhattacharjee, S.S.; George, N.V. Joint Logarithmic Hyperbolic Cosine Robust Sparse Adaptive Algorithms. IEEE Trans. Circuits Syst.s II Express Briefs 2021, 68, 526–530. [Google Scholar] [CrossRef]
- Kumar, K.; Karthik, M.L.N.S.; George, N.V. Generalized Modified Blake–Zisserman Robust Sparse Adaptive Filters. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 647–652. [Google Scholar] [CrossRef]
- Kumar, K.; Pandey, R.; Bora, S.S.; George, N.V. A Robust Family of Algorithms for Adaptive Filtering Based on the Arctangent Framework. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 1967–1971. [Google Scholar] [CrossRef]
- Ren, C.; Wang, Z.; Zhao, Z. A new variable step-size affine projection sign algorithm based on a posteriori estimation error analysis. Circuits Syst. Signal Process. 2017, 36, 1989–2011. [Google Scholar] [CrossRef]
- Kim, J.; Chang, J.H.; Nam, S.W. Affine projection sign algorithm with l1 minimization-based variable step-size. Signal Process. 2014, 105, 376–380. [Google Scholar] [CrossRef]
- Shams Esfand Abadi, M.; Mesgarani, H.; Khademiyan, S.M. Robust variable step-size affine projection sign algorithm against impulsive noises. Circuits Syst. Signal Process. 2020, 39, 1471–1488. [Google Scholar] [CrossRef]
- Yoo, J.; Shin, J.; Park, P. Variable Step-Size Affine Projection Sign Algorithm. IEEE Trans. Circuits Syst. II Express Briefs 2014, 61, 274–278. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, J. Modified variable step-size affine projection sign algorithm. Electron. Lett. 2013, 49, 1264–1265. [Google Scholar] [CrossRef]
- Cao, X.; Wang, C.; Li, W.; Cai, Q. An On-Chip Fractally Chipped FBAR Filter With Ba-Zn-Fe-Sc-O Thin Film in 5G-FR2 Millimeter-Wave Band. IEEE Electron Device Lett. 2023, 44, 682–685. [Google Scholar] [CrossRef]
- Shin, J.; Yoo, J.; Park, P. Variable step-size affine projection sign algorithm. Electron. Lett. 2012, 48, 1. [Google Scholar] [CrossRef]
- Huang, F.; Zhang, J.; Zhang, S. Combined-step-size affine projection sign algorithm for robust adaptive filtering in impulsive interference environments. IEEE Trans. Circuits Syst. II Express Briefs 2015, 63, 493–497. [Google Scholar] [CrossRef]
- Ljung, T. A shift in paradigm for system identification. Int. J. Control 2020, 93, 173–180. [Google Scholar] [CrossRef]
- Nolan, J.P. Univariate Stable Distributions, Models for Heavy Tailed Data; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.; Li, G.; Zhang, H.; Cao, X. Variable Step Size Methods of the Hybrid Affine Projection Adaptive Filtering Algorithm under Symmetrical Non-Gaussian Noise. Symmetry 2023, 15, 1158. https://doi.org/10.3390/sym15061158
Zhou X, Li G, Zhang H, Cao X. Variable Step Size Methods of the Hybrid Affine Projection Adaptive Filtering Algorithm under Symmetrical Non-Gaussian Noise. Symmetry. 2023; 15(6):1158. https://doi.org/10.3390/sym15061158
Chicago/Turabian StyleZhou, Xingli, Guoliang Li, Hongbin Zhang, and Xin Cao. 2023. "Variable Step Size Methods of the Hybrid Affine Projection Adaptive Filtering Algorithm under Symmetrical Non-Gaussian Noise" Symmetry 15, no. 6: 1158. https://doi.org/10.3390/sym15061158