In the setting of integral equations, boundary value problems play a significant role in the theory of applied differential calculus. Differential equation of ordinary, partial, integro, and stochastic types are some examples (see [
1,
2,
3,
4]). Numerous mathematical formulations of mathematical phenomena incorporate integro-differential equations, which appear in many domains such as in physics, material sciences, fractional calculus theory, number theory, ecology, and epidemiology (see [
5,
6,
7,
8,
9]). They often occur in approximation models of the real-world problems and this motivates the in-depth study of these types of integral models aiming to prove existence or/and uniqueness of their solutions.
The Fredholm, Volterra, and integro-differential equations have important features and are used widely in mathematics. Many mathematicians have explored generating functions and combinatorial sums of specific polynomials and integro-differential equations in particular. Because integral questions of this sort exist in many mathematical models, computer algorithms, engineering difficulties, physics, and fractional calculus theory (cf. other articles [
10,
11,
12,
13,
14,
15,
16]).
On the other hand, the Adomian decomposition and its modifications are widely utilized in many fields of applied mathematics, particularly in integral equation theory. As a result, numerous researchers, including Wazwaz and his students, have researched these numerical methods in order to solve difficult problems and get accurate outcomes. In previous articles, these approaches were also applied to the numerical solution of Abel’s integral equations, the Bagley–Torvik equations, the Fredholm and Volterra integral equations, the integro equations that play a significant role in mathematics to obtain meaningful relations and representations; see [
17,
18,
19,
20,
21,
22,
23,
24] and closed references therein.
Furthermore, the exploration and solution of integro differential equation of nonlinear Volterra and Fredholm types have attracted more and more attention by using homotopy analysis methods. Over the years, this method has been proposed to find solution of linear and nonlinear integral equations, for example, see [
25,
26,
27,
28,
29].
Among the previous obtained results in study of the BVPs including the construction of an integro-differential solution are those obtained in previous studies. For instance, in this paper, we will consider a nonlinear integro-differential equation of the form and solving it by using modified Adomian and homotopy analysis methods,
with the boundary conditions
where
,
,
and the kernel
are known functions under fulfilling the requirements to be provided in the following section. The parameters
,
and ℧ are nonzero real parameters and
are finite natural numbers. While
is an unknown function that must be discovered in the space
and
.
On the other hand, the main advantage of this problem is the application of boundary value problem on integral equation, which enable us to convert and analyse the problem to an ordinary differential equation. In addition, the large number of studies on differential equations in neutral, delay, and KdV with different boundary conditions have been investigated by researchers; see for example, [
30,
31,
32].
The rest of our study is arranged as follows: In
Section 1, we recall the main concepts, and existence and uniqueness of the solution.
Section 2 describes the methods of solution of (
1) by the algorithms proposed in this article in detail in
Section 2.1 and
Section 2.2, respectively.
Section 3 describes the numerical results and analysis. Finally,
Section 4 gives the conclusion of our study.
1. Basic Tools and Existence of Solutions
In this section we briefly review some basic elements of the Volterra–Fredholm integral equations and integro-differential equations. For a comprehensive study on these topics, we refer the interested reader to [
33,
34,
35,
36,
37].
Definition 1 (See [
33])
. Let be a metric space. Then, we say a function : is a contraction mapping, if there is a non-negative real number such that Theorem 1 (See [
37])
. Suppose that on J, where are all Riemann integrable functions on I. If is uniformly bounded on J, then and Theorem 2 (See [
34])
. Let be a metric space, then for each contraction mapping has a unique fixed point of τ in X. Theorem 3 (See [
35])
. Let be a Banach space over and be a nonempty closed, convex and bounded subset of X. Any Compact operator has at least one fixed point. Our two theorems are considering the Arzela–Ascoli theorem and Krasnoselskii fixed point theorem, respectively.
Theorem 4 (See [
33])
. Every bounded and equicontinuous sequence in the closed and bounded interval has a uniformly convergent subsequence. Theorem 5 (See [
36])
. Let X be a Banach space and μ be a closed and convex nonempty subset of X, then the functions with the following properties:- 1.
is a contraction mapping,
- 2.
is compact and continuous,
- 3.
for all , such that
Then, there is in μ such that .
Let us briefly recall the following concepts that will be involved in proving the next theorem of existence and uniqueness of the solutions.
Main postulates:
We suppose the following Hypotheses to prove all theorems.
Hypothesis 1 (H1). The functions and belong to .
Hypothesis 2 (H2). The known free function is a member of the .
Hypothesis 3 (H3). For any
, the known kernel
is continuous in
, for all
.
Hypothesis 5 (H5).
where
and
where
are finite positive constants depend on
l and
is a positive real numbers.
Theorem 6. If the conditions – are applied, then (
1)–(
2)
are reduce to the as follows Equation (3) is nonlinear Volterra–Fredholm integral equations (NVFIE).
where Proof. If a function
belongs
, then:
and
It follows from Equation (
13) with
that
and by putting Equation (
14) into Equation (
12), we obtain
By using the result in Equations (
12) and (
11), we can obtain
where
and
Substitution Equations (
11), (
15), (
16), (
19) and (
20) into Equation (
1) to get
where
and
are determined in Equations (
5)–(
7), (
9) and (
10) above, respectively.
The converse is straight forward and thereby it is omitted. □
The following theorem states that if the NVFIE (
3) has a continuous solution if it meet the requirements
–
.
Theorem 7. If conditions – hold, then an NVFIE (
3) has a continuous solution.
Proof. Let
. Where the positive, finite solution of the Equation (
22) is denoted by the symbol
.
and
is an upper bound of
Considering (
3) and setting the following two operators
where
,
are two arbitrary functions in the set
. Now,
By using the same arguments as above, we can deduce
From Equations (
23) and (
24), it follows that
Now, if
are two elements in
J, without loss generality
. Applying the conditions
–
and using the continuous functions
,
and
in
, we have
We can conclude that the right-hand side of Equation (
26) is independent of
. In addition, it tends zero when
tends zero. Therefore, this leads to
approaches zero.
Considering Equation (
27), if
approaches zero, then
tends zero. Hence, the set
is equicontinuous. Also, we have
and
are two elements in
As a result, considering
,
is a self-operator. If
and
are any two functions, then they belong to
. Therefore,
and according to the condition (5),
is a contraction operator on
.
Let
with
be a sequence such that
approaches
whereas
n tends to
∞. Then, for any two elements
which contains in
and
, we have
By applying (1), it follows that
where
and
are finite positive real numbers that depend on
l. As a result, the operator
is a sequentially continuous operator on
.
The sequence
is uniformly bounded on
J since
Furthermore, the sequence
is equicontinuous because
The sequence
has a subsequence
which uniformly converges according to the Arzela–Ascoli theorem (4). Furthermore, the operator
is completely continuous and the collection
is compact. After satisfying all of the conditions of the Krasnosel’skii theorem (5), the operator
has at least one fixed point in
, which is a solution to the NVFIE (
3). □
Theorem 8. The NVFIE (
21)
has a unique solution, whenever the conditions – and are satisfied. Proof. It is obvious that the operator
is a self-adjoint operator on
. By using the same method used in Equation (
28), we have
Also,
, we have
By using Equation (
28) with
and (
29), it follows that
We conclude that the operator is contraction on
according to the Banach contraction principal (3) and the condition
. As a result, the NVFIE (
21) has a unique continuous solution in
. □
2. Methods of Solutions
Our main section is divided into two subsections that deal with the solution technique for the given nonlinear problem including the modified Adomain decomposition and homotopy analysis methods.
2.1. The Modified Adomain Decomposition Method Solution
If the criteria of Theorem 8 hold, then the next section will explain how can we apply the MADM to get an approximate solution to the NVFIE (
21). Assume that the formula can be used to estimate the unknown function
of the Equation (
21)
If
, then we have
where
is an Adomain’s polynomial, for
.
The following theorem holds if the conditions of Theorem 8 are satisfied:
Theorem 9. The NVFIE (
21)
converges to the exact solution , whenever the approximate solution established by Equations (
32)–(
34).
Proof. Define a sequence of partial sum
as follows:
For each pair of positive integers
with
and
, we have
By setting
, we have
where
and
Take
to get
Substituting the inequality (
37) into the inequality (
36), setting
, and applying the triangle inequality, we get
where
As a result, the sequence
is a Cauchy in the Banach space
, and hence,
□
2.2. The Homotopy Analysis Method Solution
In this section, we analyse for the NVFIE (
21) under the conditions of Theorem 8 by applying the HAM (see [
27]) to (
2) as follows: If the criteria of Theorem 8 hold, then the HAM will be used to obtain an approximate solution to the NVFIE (
21) in the section that follows. Equation (
2) provides that
We define the nonlinear operator
by
From Equations (
38) and (
39), we get
The following explanation for the homotopy of the unknown function
can be considered
The function is the initial approximate solution of the unknown function ;
The rate of convergence parameter is used to the method suggested;
Equation (
41) embeds the homotopy parameter
.
The operator is known as an auxiliary linear operator if when ;
If the Equation (
39) is denoted by the operator
, then we obtain
Solving Equation (
43) yields
where
3. Numerical Results
As an application of the construction of the above algorithms in Theorems 7 and 8, we can now present some numerical examples. Data calculations and graphs are implemented by MATLAB 2022a.
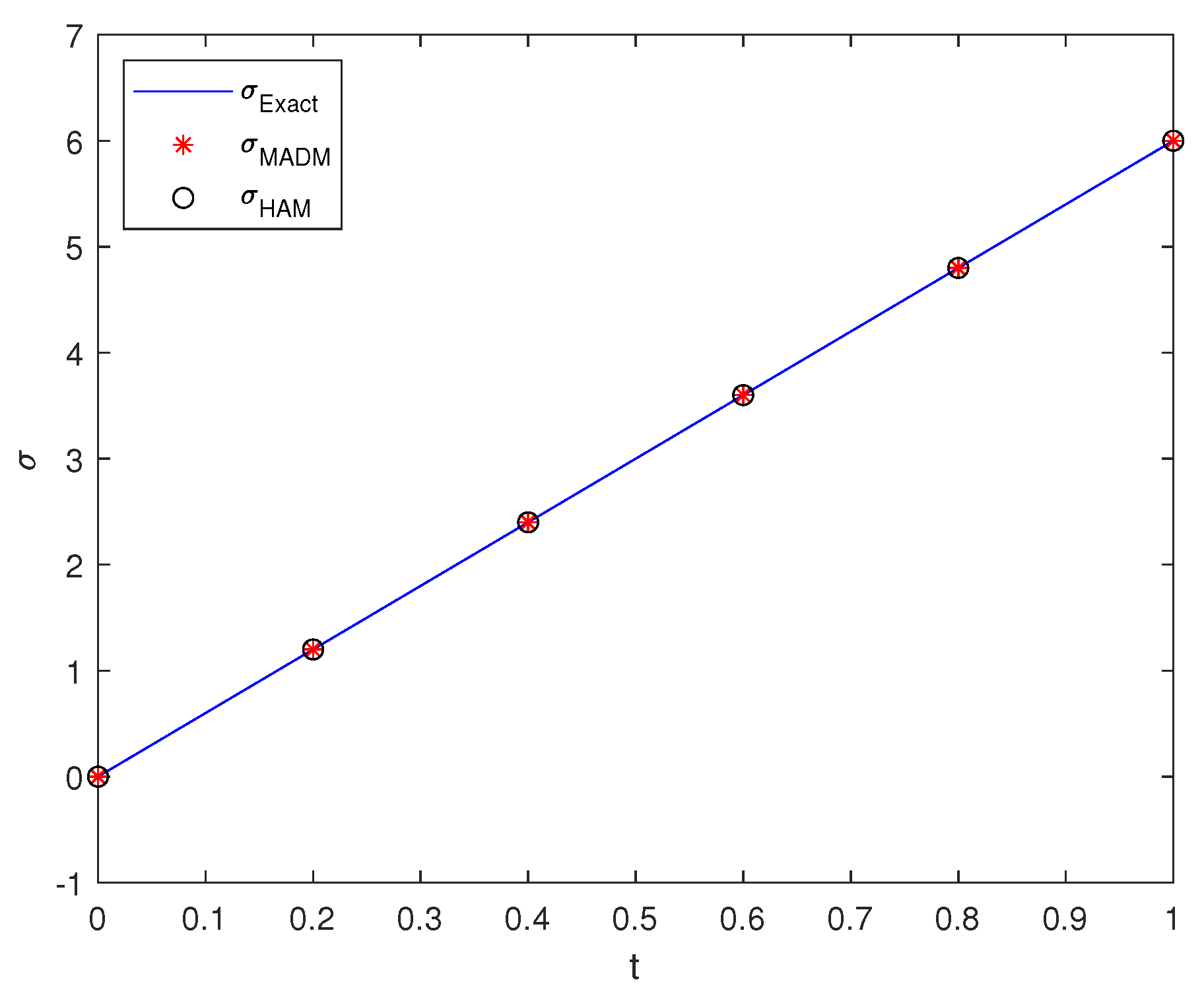
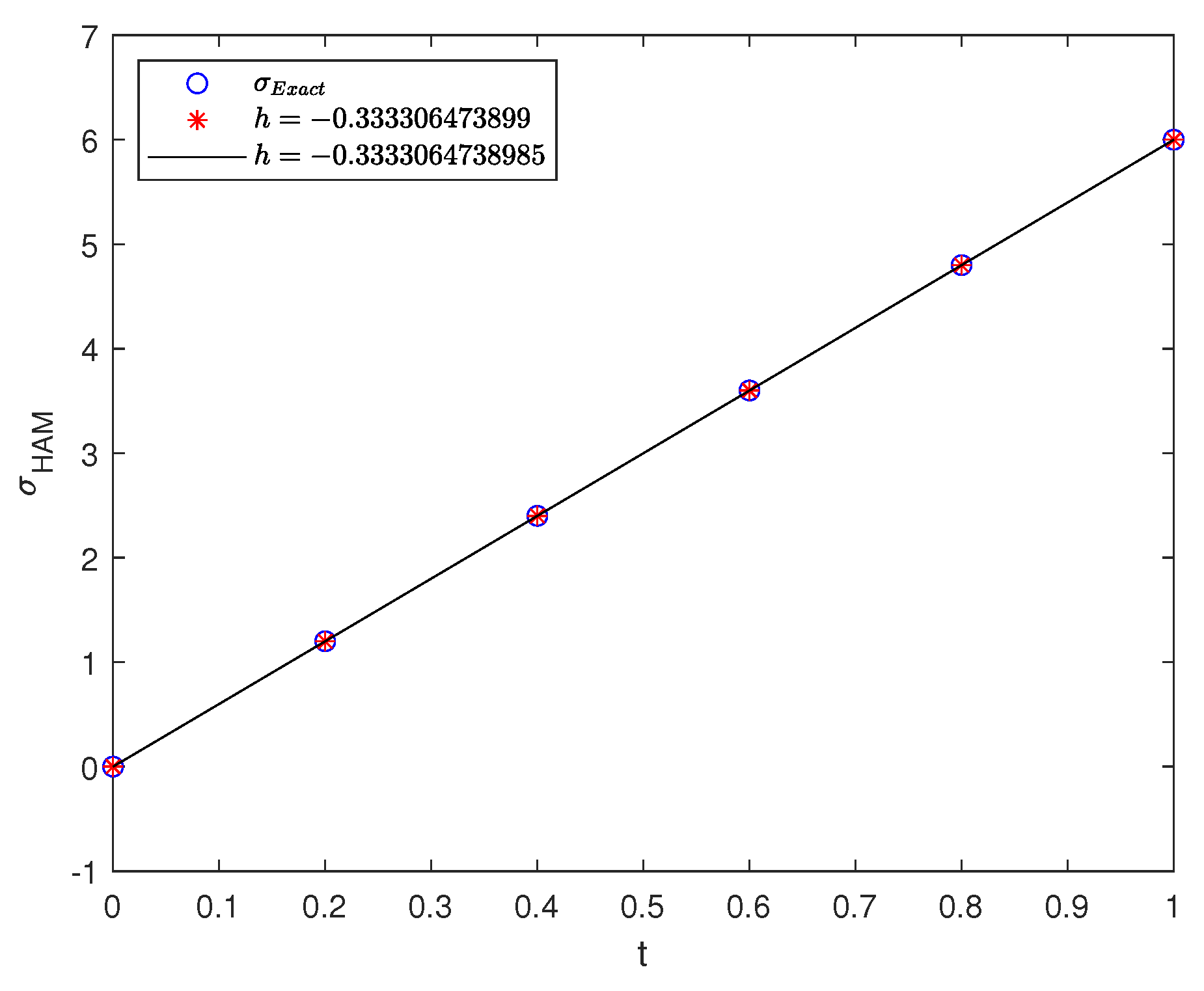
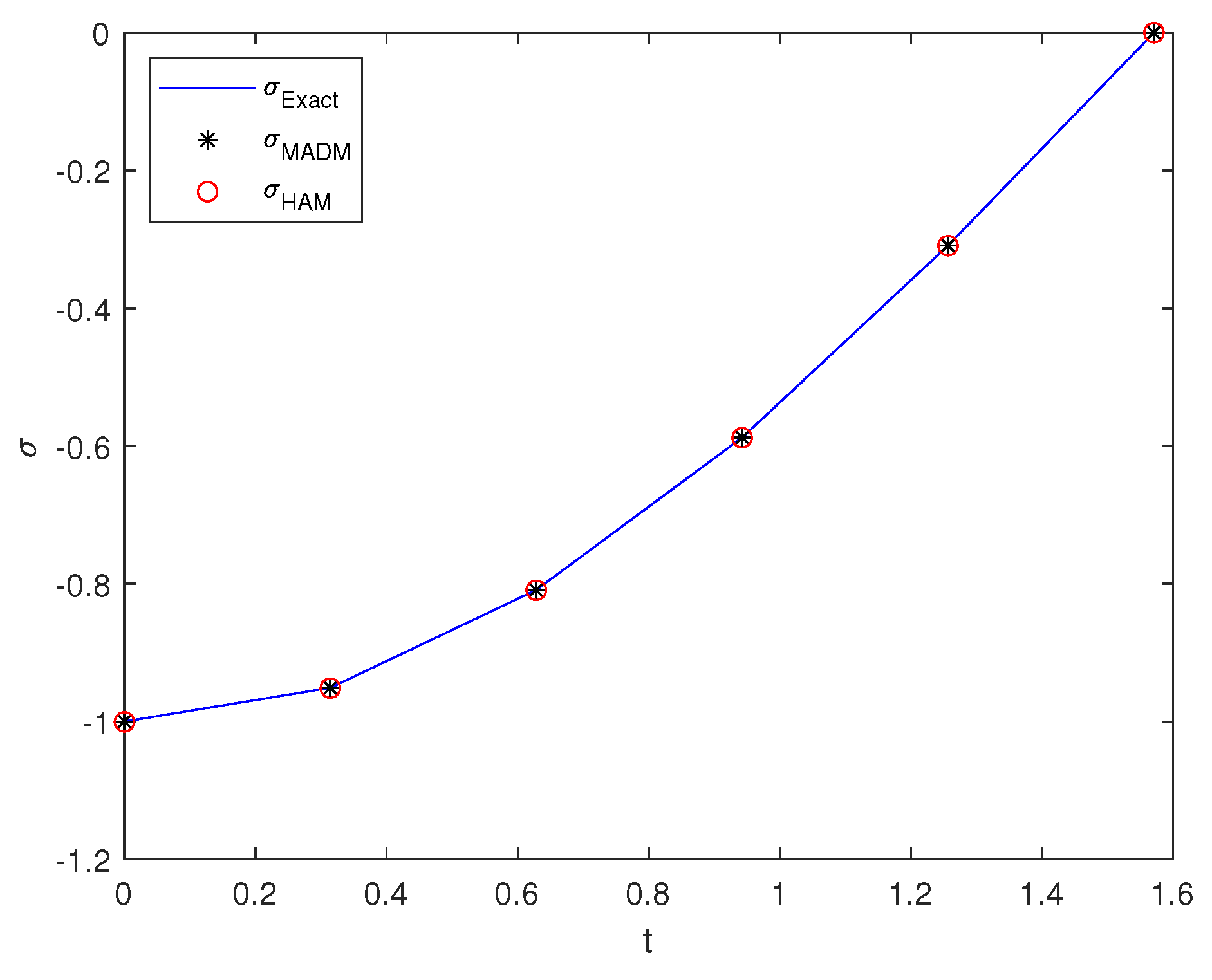
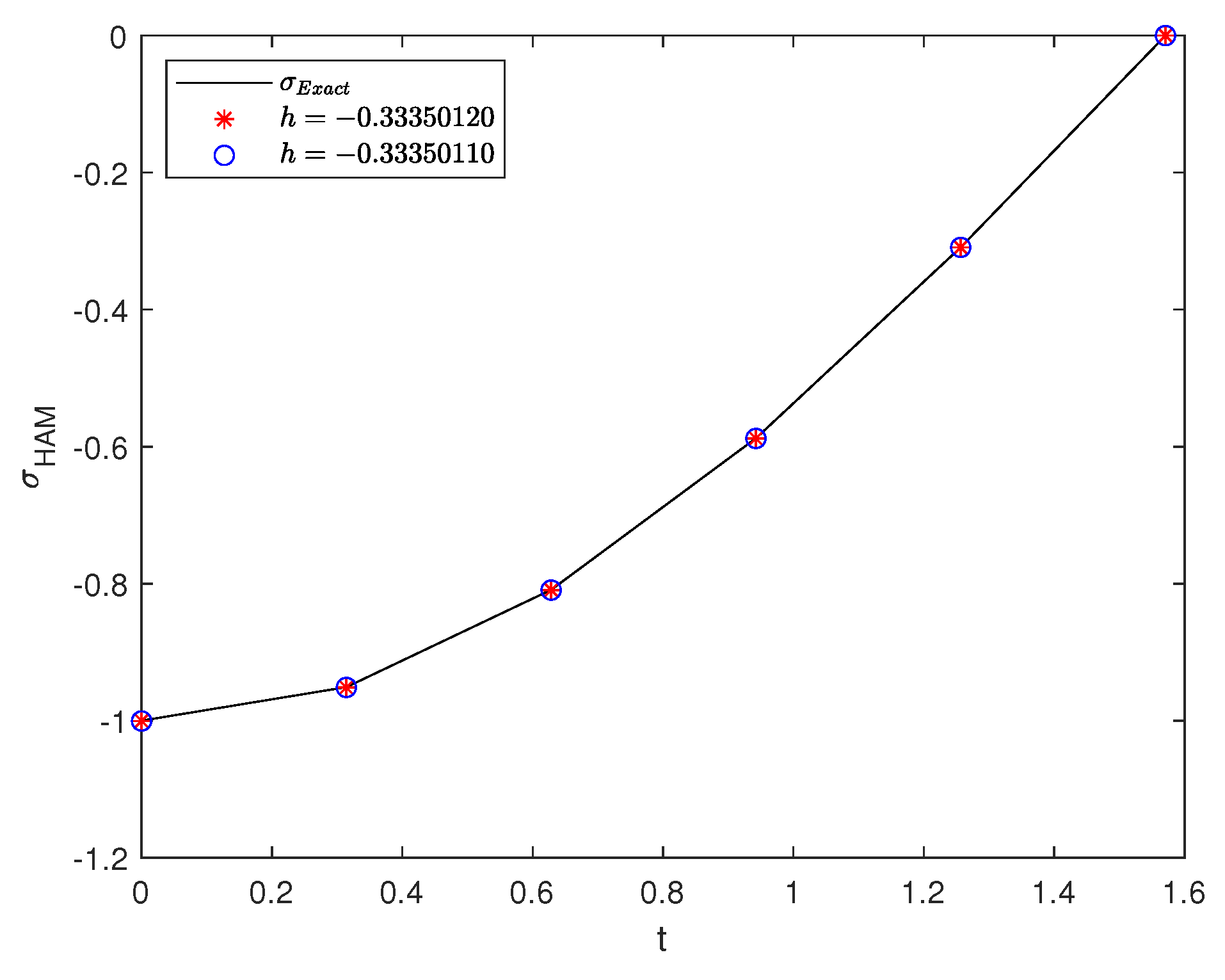
Example 1. Our first example considers the boundary value problemwhere and the exact solution , with boundary conditions and and Considering the postulate ,postulate ,and postulate ,respectively. These confirm the convergence of the problem. Repeating the above process as in Section 1 by setting , we can deduce a nonlinear Volterra–Fredholm integral equation in the form of (3). Moreover, (45) can satisfy the condition postulate it has a unique solution. Thus, Theorem 8 confirms the uniqueness of solution of this problem. Finally, we tabulate the numerical results in Table 1 with for the proposed methods and their absolute errors between them with the exact value. Moreover, we have drawn it graphically in Figure 1 for the same value of h. For several values of , the best approximations of can be deduced as tabulated in Table 2. It is worth mentioning that the h values can confirm the convergence of the approximate solution, which are demonstrated in Figure 2. Example 2. Consider the following boundary value problem:with boundary conditionswhere , is exact solution, for all and Observe that the postulate postulate and postulate respectively. These confirm the convergence of the problem. By repeating the approach described in Section 1 and setting , we may get a nonlinear Volterra–Fredholm integral equation in the form of (3). Furthermore, (46) meets the requirement postulate . Thus, Theorem 8 confirms the uniqueness of this problem’s solution. Finally, we arrange the numerical results for the suggested approaches and their absolute errors with the exact value in Table 3 with . Furthermore, we have illustrated it graphically in Figure 3 for the same value of h. Table 2 illustrates the average absolute infinity norm errors between the exact and approximate solutions (MADM and HAM) with . In addition, Figure 4 illustrates the absolute errors of infinity of the , , with and the exact solution at the same points used in Table 2. Again, there are many values of which give the best approximations of as shown in Table 4. 4. Conclusions and Future Directions
The main theme of this research is focused on the solution and analysis of a nonlinear boundary value problems for a Volterra–Fredholm integro equation with specific boundary conditions. We explicitly build the existence and uniqueness of an auxiliary problem with the simplified right-hand side using Arzela–Ascoli and Krasnoselskii fixed point theorems. Furthermore, using the theory of the Banach contraction principle index, we demonstrate the existence of at least one continuous solution to the original issue, as stated in Theorem 7. We have included some numerical talks and clear graphical representations for Volterra–Fredholm integro issues for several eigenvalues and homotopy parameters to help you grasp the resultant boundary models. Many solutions have been found and are depicted in
Figure 1,
Figure 2 and
Figure 3. In addition, efficiency of the proposed schemes is also presented in tables by calculating absolute errors.
The Volterra–Fredholm integro fractional differential problems have a bright future as a type of highly integrated boundary value problem in integrated fractional operators; however, there is still room for improvement in transmission efficiency and numerical solutions, which is also the future direction of our work.
Author Contributions
Conceptualization, H.H., M.H., E.A.-S. and M.Y.A.; Data curation, H.H. and H.M.S.; Formal analysis, E.A.-S.; Funding acquisition, M.Y.A.; Investigation, H.H., H.M.S., M.H., P.O.M. and M.Y.A.; Methodology, H.M.S., E.A.-S. and M.Y.A.; Project administration, H.M.S. and P.O.M.; Resources, E.A.-S.; Software, H.H., H.M.S. and P.O.M.; Supervision, M.H.; Validation, P.O.M.; Visualization, E.A.-S.; Writing—original draft, H.H.; Writing—review & editing, M.H., P.O.M. and M.Y.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- AzZobi, E.; AlZoubi, W.; Akinyemi, L.; Senol, I.; Mamat, M. Abundant closed-form solitons for time-fractional integro-differential equation in fluid dynamics. Opt. Quantum Electron. 2021, 53, 132. [Google Scholar]
- Indiaminov, R.; Butaev, R.; Isayev, N.; Ismayilov, K.; Yuldoshev, B.; Numonov, A. Nonlinear integro-differential equations of bending of physically nonlinear viscoelastic plates. IOP. Conf. Ser. Mater 2020, 869, 052048. [Google Scholar] [CrossRef]
- Srivastava, H.M.; Mohammed, P.O.; Guirao, J.L.G.; Hamed, Y.S. Some higher-degree Lacunary fractional splines in the approximation of fractional differential equations. Symmetry 2021, 13, 422. [Google Scholar] [CrossRef]
- Alvarez, O.; Tourin, A. Viscosity solutions of nonlinear integro-differential equations. In Annales de l’Institut Henri Poincaré C, Analyse Non Linéaire; Elsevier: Amsterdam, The Netherlands, 1996; Volume 13, pp. 293–317. [Google Scholar]
- Laadjal, Z.; Ma, Q.-H. Existence and uniqueness of solutions for nonlinear Volterra–Fredholm integro-differential equation of fractional order with boundary conditions. J. Math. Meth. Appl. Sci. 2019, 44, 8215–8227. [Google Scholar] [CrossRef]
- Singh, H.; Sahoo, M.R.; Singh, O.P. Numerical method based on Galerkin approximation for the fractional advection-dispersion equation. Int. J. Appl. Comput. Math. 2017, 3, 2171–2187. [Google Scholar] [CrossRef]
- Rao, V.S.H.; Rao, K.K. On a nonlinear differential-integral equation for ecological problems. Bull. Austral. Math. Soc. 2009, 19, 363–369. [Google Scholar] [CrossRef]
- Hethcote, H.W.; Tudor, D.W. Integral equation models for endemic infectious diseases. J. Math. Biol. 2009, 9, 37–47. [Google Scholar] [CrossRef]
- Srivastava, H.M. A survey of some recent developments on higher transcendental functions of analytic number theory and applied mathematics. Symmetry 2021, 13, 2294. [Google Scholar] [CrossRef]
- Wazwaz, A.M.; El-Sayed, S.M. A new modification of the Adomian decomposition method for linear and nonlinear operators. J. Appl. Math. Compt. 2001, 122, 393–405. [Google Scholar] [CrossRef]
- Bildik, N.; Inc, M. Modified decomposition method for nonlinear Volterra–Fredholm integral equations. Chaos, Solit. Fract. 2007, 33, 308–313. [Google Scholar] [CrossRef]
- Abdou, M.A.; Youssef, M.I. On an approximate solution of a boundary value problem for a nonlinear integro-differential equation. Arab J. Basic Appl. Sci. 2021, 28, 386–396. [Google Scholar] [CrossRef]
- HamaRashid, H.A.; Hama, M.F. Approximate solutions for a class of nonlinear Volterra–Fredholm integro-differential equations under Dirichlet boundary conditions. AIMS Math. 2022, 8, 463–483. [Google Scholar]
- Dawooda, L.A.; Hamoud, A.A.; Mohammed, N.M. Laplace discrete decomposition method for solving nonlinear Volterra–Fredholm integro-differential equations. J. Math. Comput. Sci. 2020, 21, 158–163. [Google Scholar] [CrossRef]
- HamaRashid, H.; Srivastava, H.M.; Hama, M.; Mohammed, P.O.; Almusawa, M.Y.; Baleanu, D. Novel algorithms to approximate the solution of nonlinear integro-differential equations of Volterra-Fredholm integro type. AIMS Math. 2023, 8, 14572–14591. [Google Scholar] [CrossRef]
- Srivastava, H.M.; Saxena, R.K. Some Volterra-type fractional integro-differential equations with a multivariable confluent hypergeometric function as their kernel. J. Integr. Equat. 2005, 17, 199–217. [Google Scholar] [CrossRef]
- Diethelm, K.; Ford, J. Numerical Solution of the Bagley–Torvik Equation. BIT Numer. Math. 2002, 42, 490–507. [Google Scholar] [CrossRef]
- Wazwaz, A. A new algorithm for calculating Adomian polynomials for nonlinear operators. Appl. Math. Comput. 2000, 111, 33–51. [Google Scholar] [CrossRef]
- Babolian, E.; Biazar, J. Solution of nonlinear equations by modified Adomian decomposition method. Appl. Math. Comput. 2002, 132, 167–172. [Google Scholar] [CrossRef]
- Yalcinbas, S.; Sezer, M. The approximate solution of high-order linear Volterra–Fredholm integro-differential equations in terms of Taylor polynomials. Appl. Math. Comput. 2000, 112, 291–308. [Google Scholar]
- Batiha, B.; Noorani, M.S.M.; Hashim, I. Numerical solutions of the nonlinear integro-differential equations. IJOPCM 2008, 1, 34–42. [Google Scholar]
- El-Sayed, S.M.; Kaya, D.; Zarea, S. The decomposition method applied to solve high-order linear Volterra–Fredholm integro-differential equations. Int. J. Nonlinear Sci. Numer. Simul. 2004, 5, 105–112. [Google Scholar] [CrossRef]
- Ali, M.R.; Hadhoud, A.R.; Srivastava, H.M. Solution of fractional Volterra–Fredholm integro-differential equations under mixed boundary conditions by using the HOBW method. Adv. Differ. Equat. 2019, 2019, 115. [Google Scholar] [CrossRef]
- Ma, X.-J.; Srivastava, H.M.; Baleanu, D.; Yang, X.-J. A new Neumann series method for solving a family of local fractional Fredholm and Volterra integral equations. Math. Probl. Eng. 2013, 2013, 325121. [Google Scholar] [CrossRef]
- He, J.-H. Homotopy perturbation method: A new nonlinear analytical technique. Appl. Math. Comput. 2003, 135, 73–79. [Google Scholar] [CrossRef]
- He, J.-H. Homotopy perturbation method for solving boundary value problems. Phys. Lett. A 2006, 350, 87–88. [Google Scholar] [CrossRef]
- Liao, S. Homotopy Analysis Method in Nonlinear Differential Equations; Higher Education Press: Beijing, China; Springer: Cham, Switzerland, 2012. [Google Scholar]
- Lakshmikantham, V.; Mohana Rao, M.R. Theory of Integro-Differential Equations; Gordon and Breach Science Publishers: Amsterdam, The Netherlands, 1995. [Google Scholar]
- Mohammed, P.O.; Machado, J.A.T.; Guirao, J.L.G.; Agarwal, R.P. Adomian decomposition and fractional power series solution of a class of nonlinear fractional differential equations. Mathematics 2021, 9, 1070. [Google Scholar] [CrossRef]
- Moaaz, O.; El-Nabulsi, R.A.; Muhib, A.; Elagan, S.K.; Zakarya, M. New improved results for oscillation of fourth-order neutral differential equations. Mathematics 2021, 9, 2388. [Google Scholar] [CrossRef]
- Ali, K.K.; Mohamed, E.M.H.; Abd El salam, M.A.; Nisar, K.S.; Khashan, M.M.; Zakarya, M. A collocation approach for multiterm variable-order fractional delay-differential equations using shifted Chebyshev polynomials. Alex. Eng. J. 2022, 61, 3511–3526. [Google Scholar] [CrossRef]
- Zakarya, M.; Abd-Rabo, M.A.; AlNemer, G. Hypercomplex systems and non-Gaussian stochastic solutions with Some numerical simulation of χ-Wick-type (2 + 1)-D C-KdV equations. Axioms 2022, 11, 658. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, J.; Zhang, L. Basic Theory of Fractional Differential Equations; World Scientific: Singapore, 2016. [Google Scholar]
- Thomson, B.S.; Bruckner, J.B.; Bruckner, A.M. Elementary Real Analysis, 2nd ed.; Prentice Hall: Kent, OH, USA, 2008. [Google Scholar]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; North-Holland: Amsterdam, The Netherlands; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Smart, D.R. Fixed Point Theorem; Cambridge Tracts in Mathematics; Cambridge University Press: Cambridge, UK, 1980. [Google Scholar]
- Thomson, B. The bounded convergence theorem. Amer. Math. Mon. 2020, 127, 483–503. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}