
Extension of King’s Iterative Scheme by Means of Memory for Nonlinear Equations


Abstract
:1. Introduction
2. Extension of King’s Method to an Optimal Eighth-Order Derivative-Free Scheme
3. Efficient King’s Type Scheme with Memory
4. Some Special Cases of Weight Functions
5. Numerical Experiments
5.1. Location of Maximum Energy Distribution
5.2. Eigenvalue Problem
5.3. Continuous Stirred-Tank Reactor (CSTR)
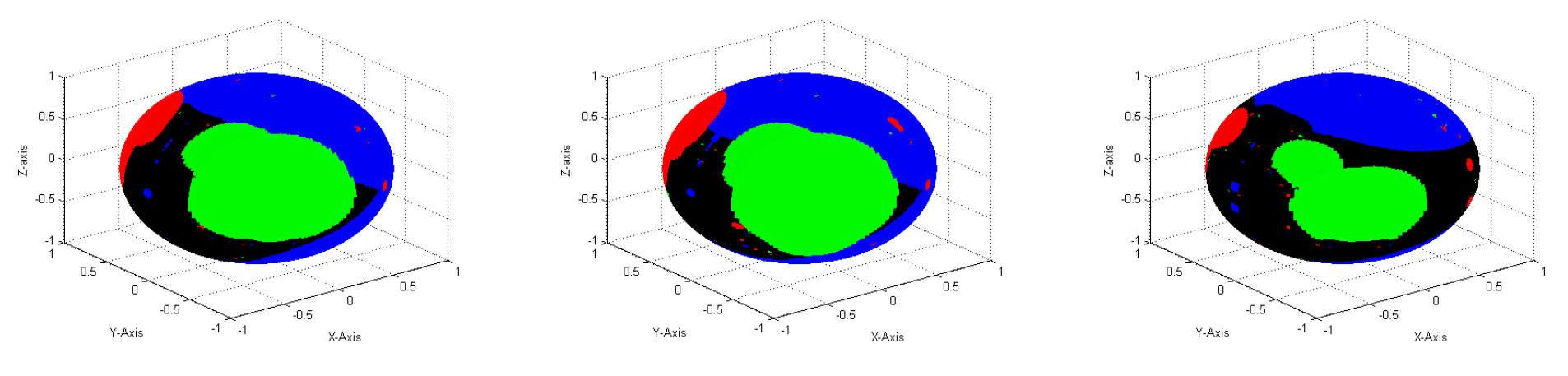
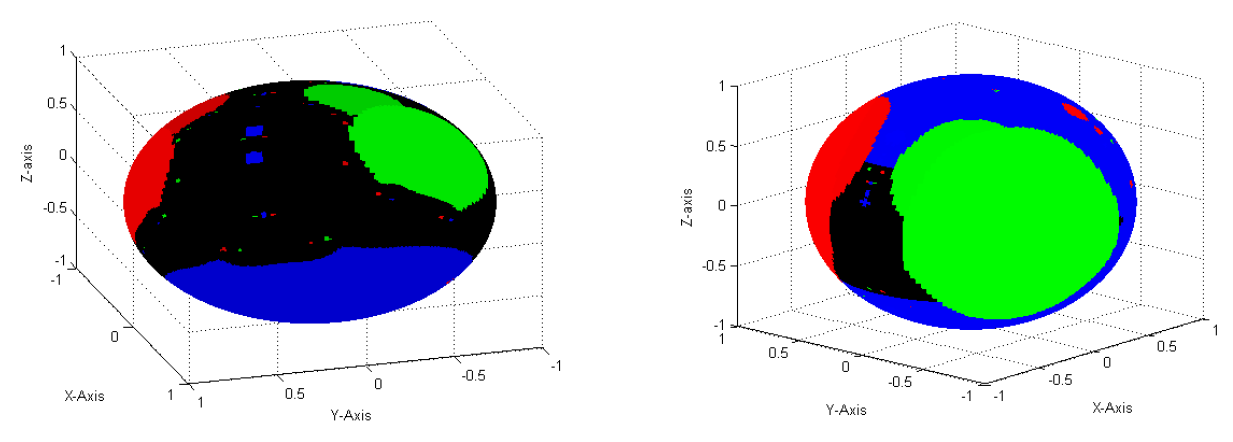
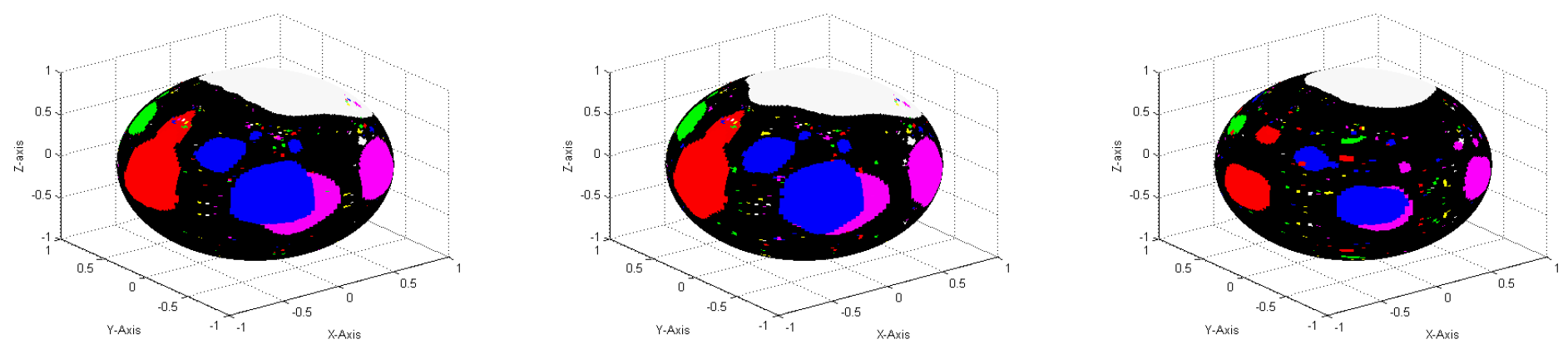
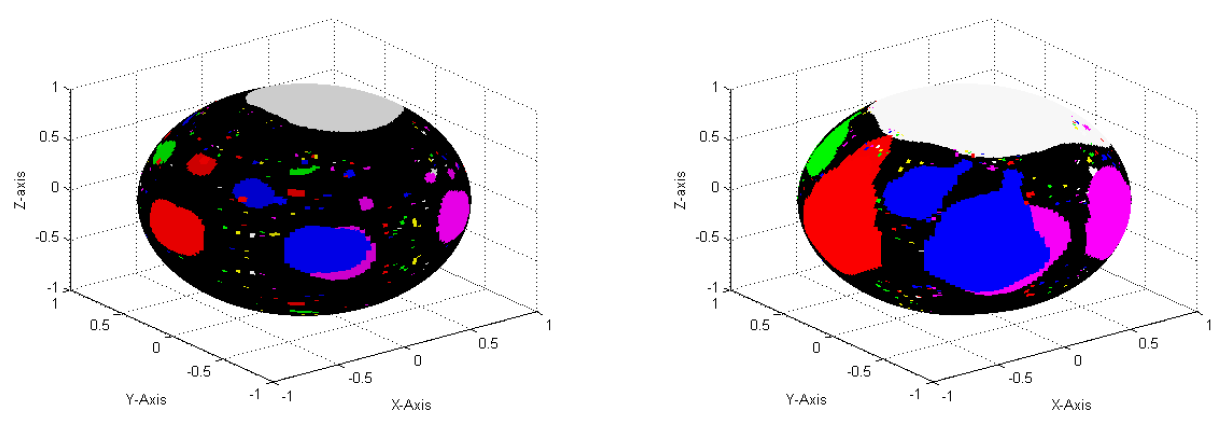
6. Stereographic Projection of Iterative Method without Memory
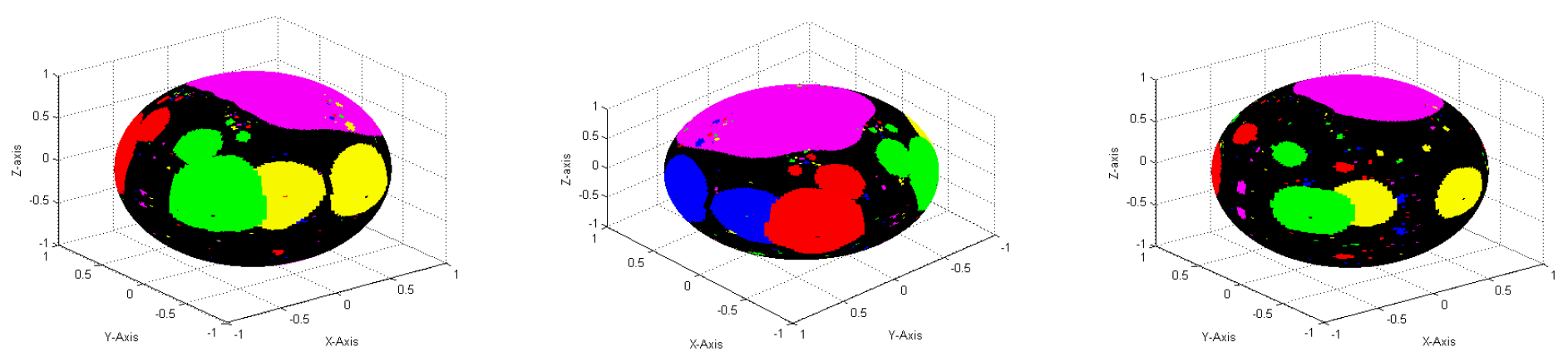
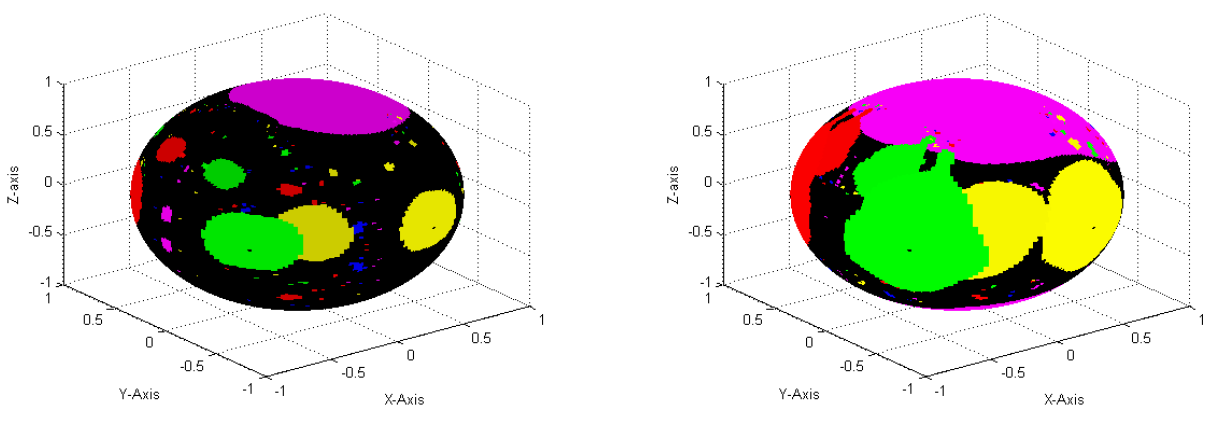
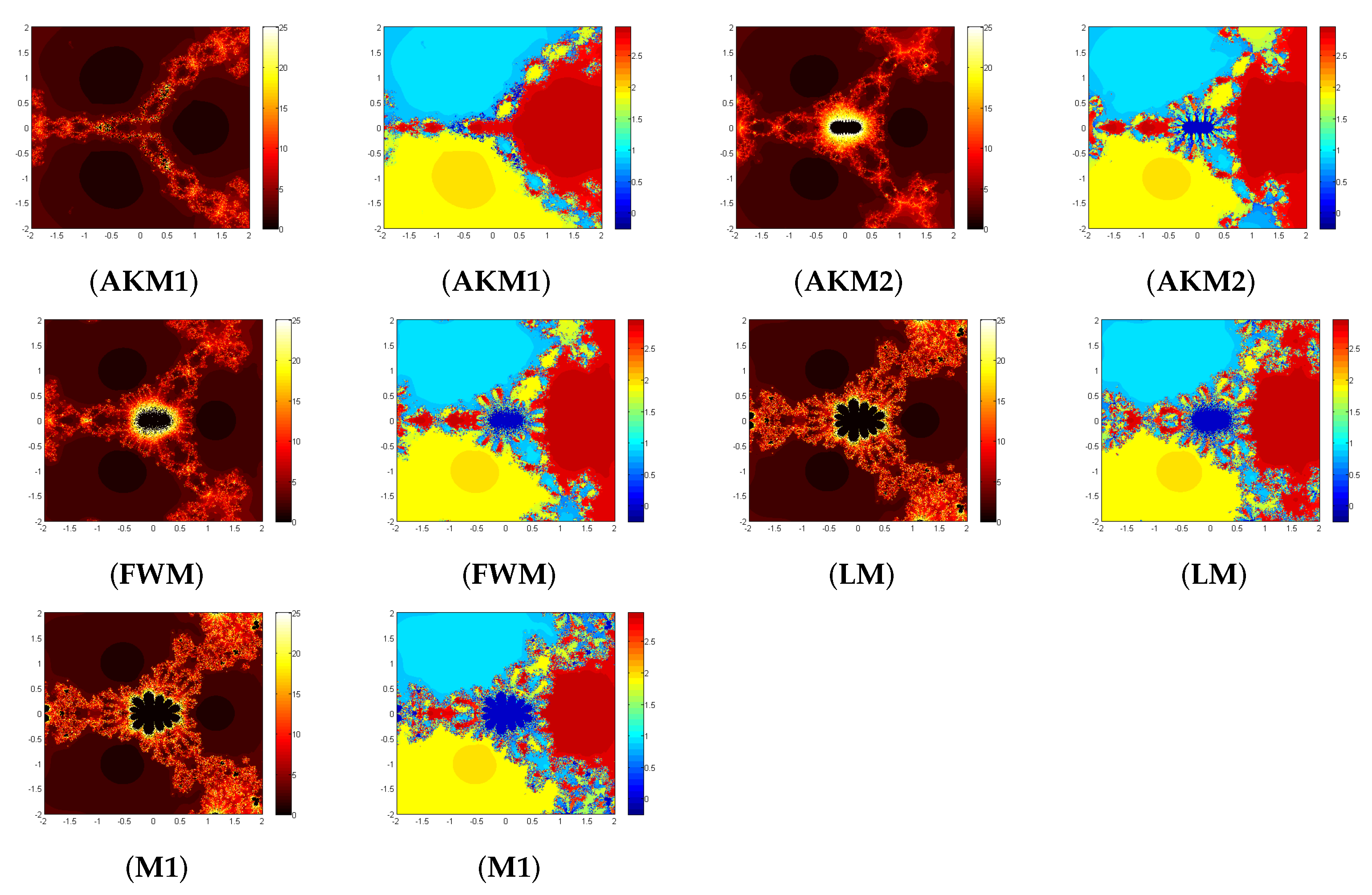
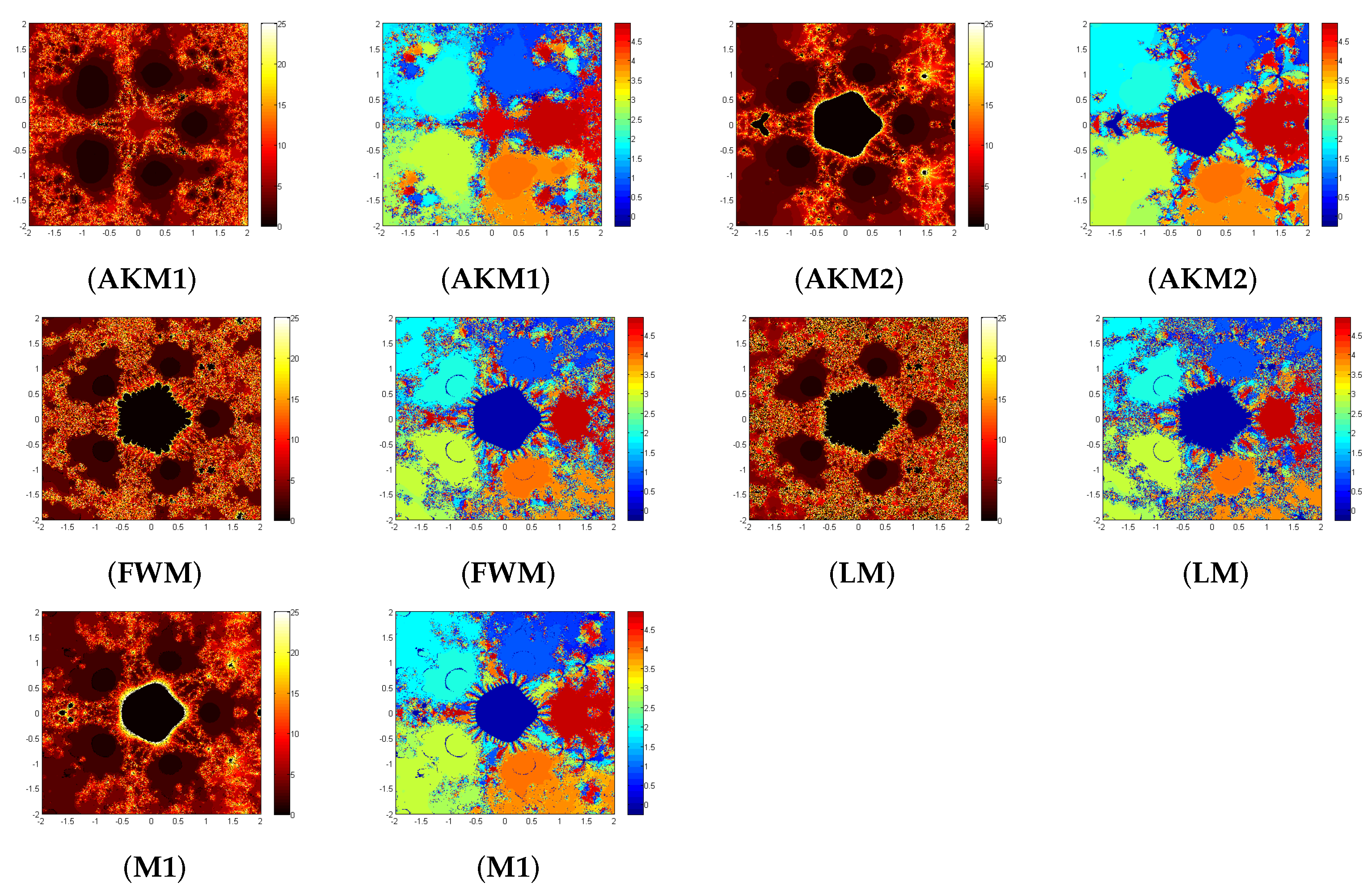
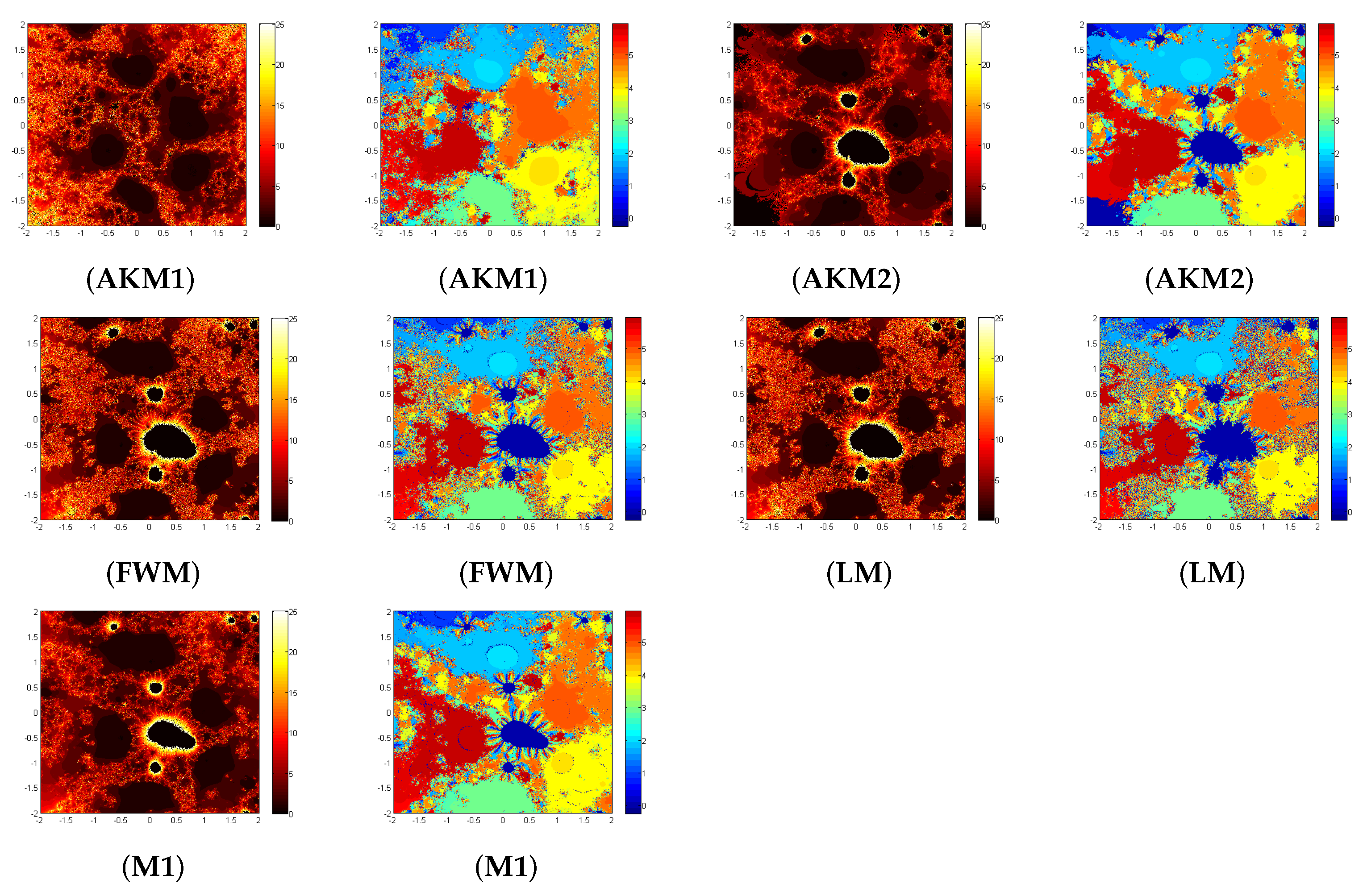
7. Dynamical Analysis of Iterative Methods with Memory
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Sample Availability
References
- Traub, J.F. Iterative Methods for the Solution of Equations; PrenticeHall, Inc.: Englewood Cliffs, NJ, USA, 1964. [Google Scholar]
- King, R.F. A family of fourth order methods for non-linear equations. SIAM J. Numer. Anal. 1973, 10, 876–879. [Google Scholar] [CrossRef]
- Ostrowski, A.M. Solution of Equations and System of Equations; Academic Press: New York, NY, USA, 1960. [Google Scholar]
- Kung, H.T.; Traub, J.F. Optimal order of one point and multipoint iteration. J. Assoc. Comput. Math. 1974, 21, 643–651. [Google Scholar] [CrossRef]
- Steffensen, I.F. Remarks on iteration. Skand. Aktuarietidskr. 1933, 16, 64–72. [Google Scholar] [CrossRef]
- Akram, S.; Zafar, F.; Junjua, M.D.; Yasmin, N. A general family of derivative free with and without memory root finding methods. JPRM 2020, 16, 64–83. [Google Scholar]
- Džunić, J.; Petković, M.S. On generalized multipoint root-solvers with memory. Comput. Appl. Math. 2012, 236, 2909–2920. [Google Scholar] [CrossRef]
- Junjua, M.D.; Zafar, F.; Yasmin, N.; Akram, S. A general class of derivative free root solvers with-memory. U.P.B. Sci. Bull. Ser. A 2017, 79, 19–28. [Google Scholar]
- Lotfi, T.; Soleymani, F.; Ghorbanzadeh, M.; Assari, P. On the construction of some tri-parametric iterative methods with memory. Numer. Algorithms 2015, 70, 835–845. [Google Scholar] [CrossRef]
- Petković, M.S.; Neta, B.; Petković, L.D.; Džunić, J. Multipoint Methods for Solving Nonlinear Equations; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Petković, M.S.; Neta, B.; Petković, L.D.; Džunić, J. Multipoint methods for solving nonlinear equations: A survey. Appl. Math. Comput. 2014, 226, 635–660. [Google Scholar] [CrossRef]
- Solaiman, O.S.; Ariffin, S.; Karim, A.; Hashimc, I. Optimal fourth- and eighth-order of convergence derivative-free modifications of King’s method. J. King Saud Univ.-Sci. 2019, 31, 1499–1504. [Google Scholar] [CrossRef]
- Zafar, F.; Akram, S.; Yasmin, N.; Junjua, M. On the construction of three step four parametric methods with accelerated order of convergence. J. Nonlinear Sci. Appl. 2016, 9, 4542–4553. [Google Scholar] [CrossRef]
- Zafar, F.; Cordero, A.; Torregrosa, J.R.; Ra, A. A class of four parametric with- and without-memory root finding methods. Comput. Math. Methods 2019, 1, e1024. [Google Scholar] [CrossRef]
- Zafar, F.; Yasmin, N.; Kutbi, M.A.; Zeshan, M. Construction of tri-parametric derivative free fourth order with and without memory iterative method. J. Nonlinear Sci. Appl. 2016, 9, 1410–1423. [Google Scholar] [CrossRef]
- Petkovic, M.S.; Zunic, J.; Petkovic, L.D. A family of two point methods with-memory for solving nonlinear equations. Appl. Anal. Discret. Math. 2011, 5, 298–317. [Google Scholar] [CrossRef]
- Lotfi, T.; Assari, P. New three- and four-parametric iterative with-memory methods with efficiency index near 2. Appl. Math. Comput. 2015, 270, 1004–1010. [Google Scholar] [CrossRef]
- Cordero, A.; Janjua, M.; Torregrosa, J.R.; Yasmin, N.; Zafar, F. Efficient four parametric with and without-memory iterative methods possessing high efficiency indices. Math. Prob. Eng. 2018, 2018, 8093673. [Google Scholar] [CrossRef]
- Behl, R.; Zafar, F.; Alshormani, A.S.; Junjua, M.; Yasmin, N. An Optimal Eighth-Order Scheme for Multiple Zeros of Univariate Functions. Int. J. Comput. Methods 2019, 16, 1843002. [Google Scholar] [CrossRef]
- Douglas, J.M. Process Dynamics and Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1972. [Google Scholar]
- Nicklawsky, A. Visualizing Chaos. Mathematics Student Work. 1. 2012. Available online: https://digitalcommons.csbsju.edu/math_students/1 (accessed on 13 May 2023).
- Amat, S.; Busquier, S.; Bermúdez, C.; Magrenan, A.A. On the election of the damped parameter of a two-step relaxed Newton-type method. Nonlinear Dyn. 2016, 84, 9–18. [Google Scholar] [CrossRef]
- Chun, C.; Neta, B. Comparing the basins of attraction for KANwar-Bhatia-Kansal family to the best fourth order method. Appl. Math. Comput. 2015, 266, 277–292. [Google Scholar] [CrossRef]
- Sharma, J.R.; Kumar, S. Efficient methods of optimal eighth and sixteenth order convergence for solving nonlinear equations. SeMA 2018, 75, 229–253. [Google Scholar] [CrossRef]
- Neta, B.; Chun, C.; Scott, M. Basins of attraction for optimal eighth order methods to find simple roots of nonlinear equations. Appl. Math. Comput. 2014, 227, 567–592. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| COC | ||||
| LM | ||||
| M1 | ||||
| FWM | ||||
| AK1 | ||||
| AK2 | ||||
| COC | ||||
| LM | ||||
| M1 | ||||
| FWM | ||||
| AKM1 | ||||
| AKM2 | ||||
| COC | ||||
| LM | ||||
| M1 | ||||
| FWM | ||||
| AK1 | ||||
| AK2 | ||||
| COC | ||||
| LM | ||||
| M1 | ||||
| FWM | ||||
| AKM1 | ||||
| AKM2 | ||||
| COC | ||||
| LM | ||||
| M1 | ||||
| FWM | ||||
| AK1 | ||||
| AK2 | ||||
| COC | ||||
| LM | ||||
| M1 | ||||
| FWM | ||||
| AKM1 | ||||
| AKM2 | ||||
| COC | ||||
| LM | ||||
| M1 | ||||
| FWM | ||||
| AK1 | ||||
| AK2 | ||||
| COC | ||||
| LM | ||||
| M1 | ||||
| FWM | ||||
| AKM1 | ||||
| AKM2 | ||||
| COC | ||||
| LM | ||||
| M1 | ||||
| FWM | ||||
| AK1 | ||||
| AK2 | ||||
| COC | ||||
| LM | ||||
| M1 | ||||
| FWM | ||||
| AKM1 | ||||
| AKM2 | ||||
| Ex. | Test Functions | Exact Root | Initial Point |
|---|---|---|---|
| 1 | |||
| 2 | |||
| 3 | |||
| 4 | |||
| 5 | |||
| 6 | |||
| 7 | |||
| COC | ||||
| LM | ||||
| M1 | ||||
| FWM | ||||
| AK1 | ||||
| AK2 | ||||
| COC | ||||
| LM | ||||
| M1 | ||||
| FWM | ||||
| AK1 | ||||
| AK2 | ||||
| COC | ||||
| LM | ||||
| M1 | ||||
| FWM | ||||
| AKM1 | ||||
| AKM2 | ||||
| COC | ||||
| LM | ||||
| M1 | ||||
| FWM | ||||
| AKM1 | ||||
| AKM2 | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Akram, S.; Khalid, M.; Junjua, M.-u.-D.; Altaf, S.; Kumar, S. Extension of King’s Iterative Scheme by Means of Memory for Nonlinear Equations. Symmetry 2023, 15, 1116. https://doi.org/10.3390/sym15051116
Akram S, Khalid M, Junjua M-u-D, Altaf S, Kumar S. Extension of King’s Iterative Scheme by Means of Memory for Nonlinear Equations. Symmetry. 2023; 15(5):1116. https://doi.org/10.3390/sym15051116
Chicago/Turabian StyleAkram, Saima, Maira Khalid, Moin-ud-Din Junjua, Shazia Altaf, and Sunil Kumar. 2023. "Extension of King’s Iterative Scheme by Means of Memory for Nonlinear Equations" Symmetry 15, no. 5: 1116. https://doi.org/10.3390/sym15051116