
Improved TV Image Denoising over Inverse Gradient
Abstract
:1. Introduction
2. Related Work
2.1. The ROF Model
2.2. p-Order TV-Based Model
2.3. Lasso Regression Model
3. The Proposed New Model
3.1. New Models
3.2. Solving the Model
| Algorithm 1: SBI to solve the problem (13). |
Input:
|
| Output: as the restored image. |
3.2.1. Solution of Related Sub-Problems
- (1)
- Subproblem (14a). This subproblem is a smooth convex optimization problem and can be expressed as.
- (2)
- Subproblem (14b). This subproblem can be expressed as.
- (3)
- Subproblem (14c). Subproblem (14c) can be expressed as.
3.2.2. Update of the Multiplier
4. Convergence Analysis
5. Numerical Experiments and Analysis
5.1. Image Dataset and Experimental Environment Setup
5.2. Image Quality Assessment Indicators
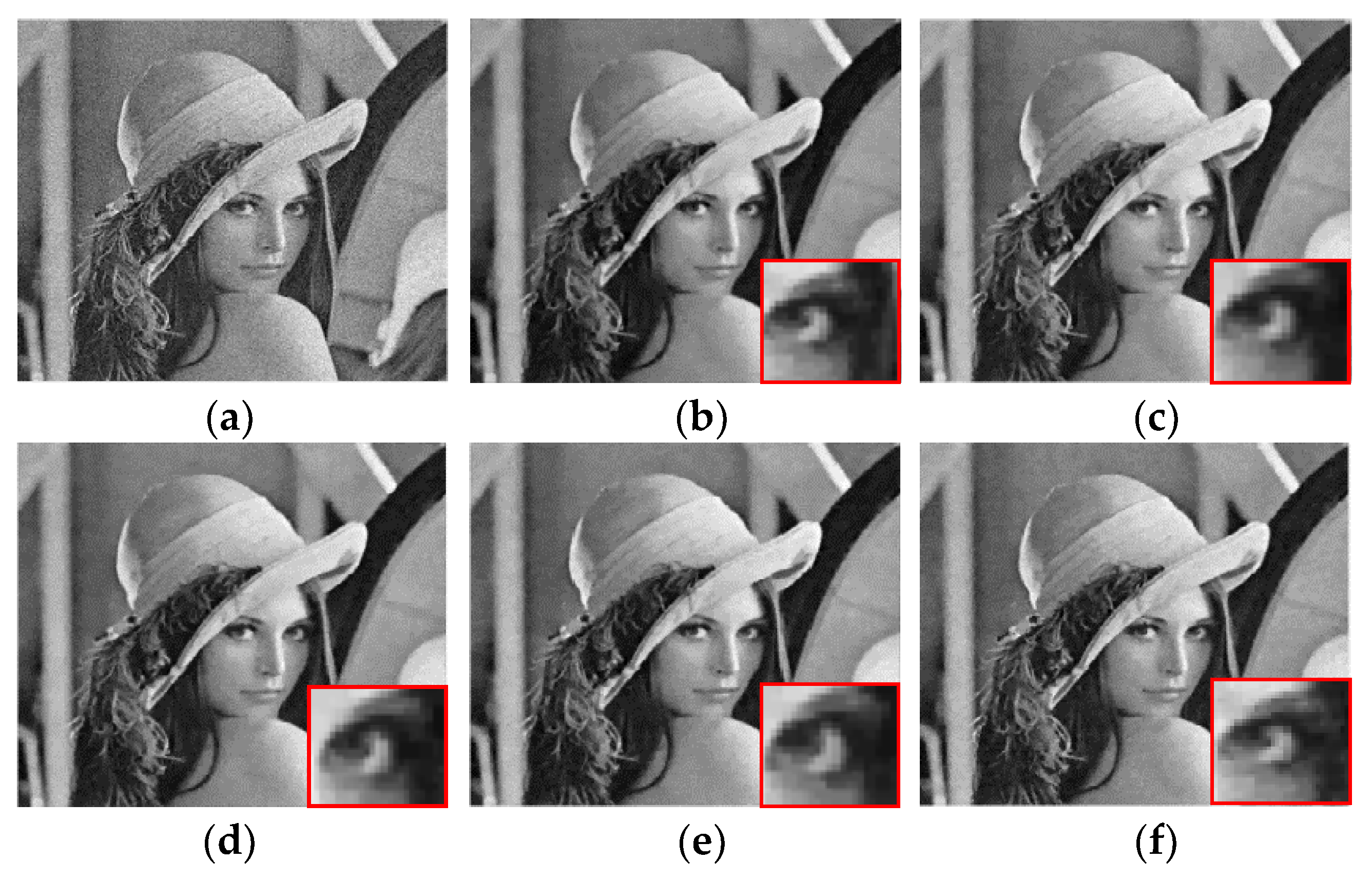
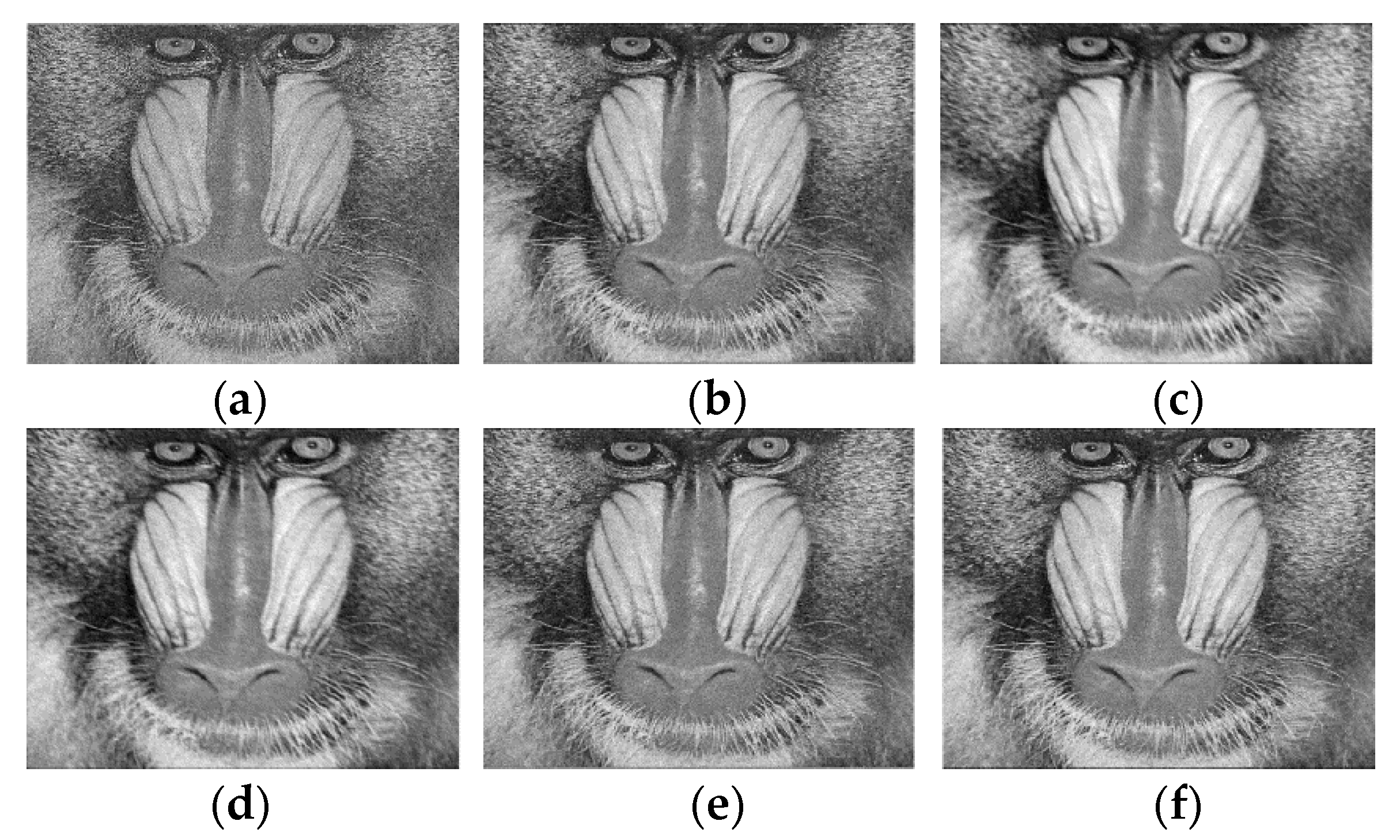
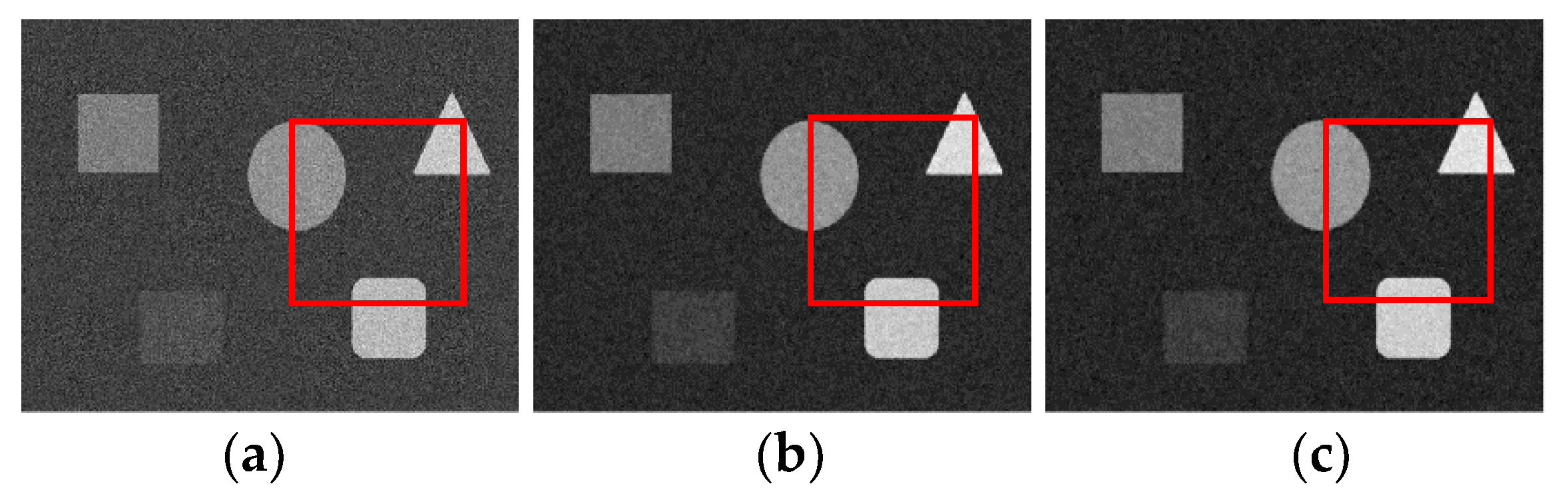
5.3. Numerical Experiments
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Al-Shamasneh, A.R.; Ibrahim, R.W. Image Denoising Based on Quantum Calculus of Local Fractional Entropy. Symmetry 2023, 15, 396. [Google Scholar] [CrossRef]
- Zhong, T.; Wang, W.; Lu, S.; Dong, X.; Yang, B. RMCHN: A Residual Modular Cascaded Heterogeneous Network for Noise Suppression in DAS-VSP Records. IEEE Geosci. Remote Sens. Lett. 2023, 20, 1–5. [Google Scholar] [CrossRef]
- Sun, L.; Hou, J.; Xing, C.; Fang, Z. A Robust Hammerstein-Wiener Model Identification Method for Highly Nonlinear Systems. Processes 2022, 10, 2664. [Google Scholar] [CrossRef]
- Xu, S.; Dai, H.; Feng, L.; Chen, H.; Chai, Y.; Zheng, W.X. Fault Estimation for Switched Interconnected Nonlinear Systems with External Disturbances via Variable Weighted Iterative Learning. IEEE Trans. Circuits Syst. II Express Briefs 2023. [Google Scholar] [CrossRef]
- Aubert, G.; Kornprobst, P. Mathematical Problems in Image Processing: Partial Differential Equations and the Calculus of Variations, 2nd ed.; Springer e-books; Springer: New York, NY, USA, 2006; ISBN 978-0-387-44588-5. [Google Scholar]
- Scherzer, O. Handbook of Mathematical Methods in Imaging; Springer Science & Business Media: New York, NY, USA, 2010; ISBN 0-387-92919-3. [Google Scholar]
- Cai, N.; Zhou, Y.; Wang, S.; Ling, B.W.-K.; Weng, S. Image Denoising via Patch-Based Adaptive Gaussian Mixture Prior Method. Signal Image Video Process. 2016, 10, 993–999. [Google Scholar] [CrossRef]
- Liu, H.; Li, L.; Lu, J.; Tan, S. Group Sparsity Mixture Model and Its Application on Image Denoising. IEEE Trans. Image Process. 2022, 31, 5677–5690. [Google Scholar] [CrossRef]
- Bhujle, H.V.; Vadavadagi, B.H. NLM Based Magnetic Resonance Image Denoising—A Review. Biomed. Signal Process. Control 2019, 47, 252–261. [Google Scholar] [CrossRef]
- Phan, T.D.K. A Weighted Total Variation Based Image Denoising Model Using Mean Curvature. Optik 2020, 217, 164940. [Google Scholar] [CrossRef]
- Pang, Z.-F.; Zhang, H.-L.; Luo, S.; Zeng, T. Image Denoising Based on the Adaptive Weighted TV Regularization. Signal Process. 2020, 167, 107325. [Google Scholar] [CrossRef]
- Chen, Y.; Zhang, H.; Liu, L.; Tao, J.; Zhang, Q.; Yang, K.; Xia, R.; Xie, J. Research on Image Inpainting Algorithm of Improved Total Variation Minimization Method. J. Ambient Intell. Humaniz. Comput. 2021, 1–10. [Google Scholar] [CrossRef]
- Pang, Z.-F.; Zhou, Y.-M.; Wu, T.; Li, D.-J. Image Denoising via a New Anisotropic Total-Variation-Based Model. Signal Process. Image Commun. 2019, 74, 140–152. [Google Scholar] [CrossRef]
- Dong, F.; Ma, Q. Single Image Blind Deblurring Based on the Fractional-Order Differential. Comput. Math. Appl. 2019, 78, 1960–1977. [Google Scholar] [CrossRef]
- Chowdhury, M.R.; Qin, J.; Lou, Y. Non-Blind and Blind Deconvolution Under Poisson Noise Using Fractional-Order Total Variation. J. Math. Imaging Vis. 2020, 62, 1238–1255. [Google Scholar] [CrossRef]
- Jaouen, V.; Gonzalez, P.; Stute, S.; Guilloteau, D.; Chalon, S.; Buvat, I.; Tauber, C. Variational Segmentation of Vector-Valued Images with Gradient Vector Flow. IEEE Trans. Image Process. 2014, 23, 4773–4785. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Zhang, Z.; Liu, X.; Wang, L.; Xia, X. Efficient Image Segmentation Based on Deep Learning for Mineral Image Classification. Adv. Powder Technol. 2021, 32, 3885–3903. [Google Scholar] [CrossRef]
- Zhou, G.; Yang, F.; Xiao, J. Study on Pixel Entanglement Theory for Imagery Classification. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5409518. [Google Scholar] [CrossRef]
- Zhao, L.; Wang, L. A New Lightweight Network Based on MobileNetV3. KSII Trans. Internet Inf. Syst. 2022, 16, 1–15. [Google Scholar] [CrossRef]
- Wang, W.; Xia, X.-G.; Zhang, S.; He, C.; Chen, L. Vector Total Fractional-Order Variation and Its Applications for Color Image Denoising and Decomposition. Appl. Math. Model. 2019, 72, 155–175. [Google Scholar] [CrossRef]
- Kazemi Golbaghi, F.; Eslahchi, M.R.; Rezghi, M. Image Denoising by a Novel Variable-order Total Fractional Variation Model. Math. Methods Appl. Sci. 2021, 44, 7250–7261. [Google Scholar] [CrossRef]
- Lian, W.; Liu, X. Non-Convex Fractional-Order TV Model for Impulse Noise Removal. J. Comput. Appl. Math. 2023, 417, 114615. [Google Scholar] [CrossRef]
- Duan, J.; Qiu, Z.; Lu, W.; Wang, G.; Pan, Z.; Bai, L. An Edge-Weighted Second Order Variational Model for Image Decomposition. Digit. Signal Process. 2016, 49, 162–181. [Google Scholar] [CrossRef]
- Fang, Y.; Zeng, T. Learning Deep Edge Prior for Image Denoising. Comput. Vis. Image Underst. 2020, 200, 103044. [Google Scholar] [CrossRef]
- Phan, T.D.K. A High-Order Convex Variational Model for Denoising MRI Data Corrupted by Rician Noise. In Proceedings of the 2022 IEEE Ninth International Conference on Communications and Electronics (ICCE), Nha Trang, Vietnam, 27–29 July 2022; pp. 283–288. [Google Scholar]
- Thanh, D.N.H.; Prasath, V.B.S.; Hieu, L.M.; Dvoenko, S. An Adaptive Method for Image Restoration Based on High-Order Total Variation and Inverse Gradient. Signal Image Video Process. 2020, 14, 1189–1197. [Google Scholar] [CrossRef]
- Chan, T.; Marquina, A.; Mulet, P. High-Order Total Variation-Based Image Restoration. SIAM J. Sci. Comput. 2000, 22, 503–516. [Google Scholar] [CrossRef]
- Scherzer, O. Denoising with Higher Order Derivatives of Bounded Variation and an Application to Parameter Estimation. Computing 1998, 60, 1–27. [Google Scholar] [CrossRef]
- Lysaker, M.; Lundervold, A.; Tai, X.-C. Noise Removal Using Fourth-Order Partial Differential Equation with Applications to Medical Magnetic Resonance Images in Space and Time. IEEE Trans. Image Process. 2003, 12, 1579–1590. [Google Scholar] [CrossRef]
- Lefkimmiatis, S.; Ward, J.P.; Unser, M. Hessian Schatten-Norm Regularization for Linear Inverse Problems. IEEE Trans. Image Process. 2013, 22, 1873–1888. [Google Scholar] [CrossRef] [Green Version]
- Surya Prasath, V.B.; Vorotnikov, D.; Pelapur, R.; Jose, S.; Seetharaman, G.; Palaniappan, K. Multiscale Tikhonov-Total Variation Image Restoration Using Spatially Varying Edge Coherence Exponent. IEEE Trans. Image Process. 2015, 24, 5220–5235. [Google Scholar] [CrossRef] [Green Version]
- Prasath, V.B.S. Quantum Noise Removal in X-Ray Images with Adaptive Total Variation Regularization. Informatica 2017, 28, 505–515. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y. An Alternating Direction Algorithm for Nonnegative Matrix Factorization; Department of Computational and Applied Mathematics Rice University: Houston, TX, USA, 2010. [Google Scholar]
- Grasmair, M. Locally Adaptive Total Variation Regularization. In Scale Space and Variational Methods in Computer Vision; Tai, X.-C., Mørken, K., Lysaker, M., Lie, K.-A., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2009; Volume 5567, pp. 331–342. ISBN 978-3-642-02255-5. [Google Scholar]
- Li, C.; Yin, W.; Zhang, Y. User’s Guide for TVAL3: TV Minimization by Augmented Lagrangian and Alternating Direction Algorithms. CAAM Rep. 2009, 20, 4. [Google Scholar]
- Liu, H.; Xiong, R.; Zhang, X.; Zhang, Y.; Ma, S.; Gao, W. Nonlocal Gradient Sparsity Regularization for Image Restoration. IEEE Trans. Circuits Syst. Video Technol. 2017, 27, 1909–1921. [Google Scholar] [CrossRef]
- Kumar, A.; Omair Ahmad, M.; Swamy, M.N.S. Tchebichef and Adaptive Steerable-Based Total Variation Model for Image Denoising. IEEE Trans. Image Process. 2019, 28, 2921–2935. [Google Scholar] [CrossRef]
- Khan, M.B.; Santos-García, G.; Noor, M.A.; Soliman, M.S. Some New Concepts Related to Fuzzy Fractional Calculus for up and down Convex Fuzzy-Number Valued Functions and Inequalities. Chaos Solitons Fractals 2022, 164, 112692. [Google Scholar] [CrossRef]
- Khan, M.B.; Santos-García, G.; Noor, M.A.; Soliman, M.S. New Hermite–Hadamard Inequalities for Convex Fuzzy-Number-Valued Mappings via Fuzzy Riemann Integrals. Mathematics 2022, 10, 3251. [Google Scholar] [CrossRef]
- Macías-Díaz, J.; Khan, M.; Noor, M.; Allah, A.; Alghamdi, S. Hermite-Hadamard Inequalities for Generalized Convex Functions in Interval-Valued Calculus. AIMS Math. 2022, 7, 4266–4292. [Google Scholar] [CrossRef]
- Khan, M.B.; Treanțǎ, S.; Soliman, M.S. Generalized Preinvex Interval-Valued Functions and Related Hermite–Hadamard Type Inequalities. Symmetry 2022, 14, 1901. [Google Scholar] [CrossRef]
- Berinde, V.; Ţicală, C. Enhancing Ant-Based Algorithms for Medical Image Edge Detection by Admissible Perturbations of Demicontractive Mappings. Symmetry 2021, 13, 885. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Delta | Methods | Evaluating Criterion (PSNR/SSIM) | |||
|---|---|---|---|---|---|
| Lena | Barbara | Boats | Baboon | ||
| Delta = 10 | LATV | 32.2371/0.8834 | 29.8621/0.8824 | 31.1085/0.8931 | 27.5627/0.8906 |
| T-ASTV | 32.4306/0.8901 | 29.5901/0.8913 | 31.1069/0.8947 | 27.2326/0.8952 | |
| NGS | 32.4195/0.8983 | 30.2378/0.8976 | 31.0814/0.8943 | 28.0918/0.8917 | |
| TVAL3 | 32.3914/0.8843 | 30.1947/0.8862 | 31.1716/0.9013 | 28.0125/0.8922 | |
| ours | 32.4321/0.8987 | 30.4974/0.8932 | 31.8834/0.9029 | 28.3017/0.8923 | |
| Delta = 20 | LATV | 28.1323/0.8906 | 25.0115/0.9029 | 27.3971/0.9012 | 25.1216/0.9023 |
| T-ASTV | 28.4741/0.8878 | 25.5346/0.8989 | 27.4461/0.9063 | 24.9958/0.9046 | |
| NGS | 28.4552/0.8924 | 25.8304/0.8968 | 27.3014/0.9103 | 24.8649/0.9014 | |
| TVAL3 | 28.4545/0.8929 | 25.8467/0.8994 | 27.40130.9046 | 25.1246/0.9127 | |
| ours | 28.4938/0.9050 | 26.8427/0.9009 | 27.8708/0.9068 | 25.2037/0.9091 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, M.; Cai, G.; Bi, S.; Zhang, X. Improved TV Image Denoising over Inverse Gradient. Symmetry 2023, 15, 678. https://doi.org/10.3390/sym15030678
Li M, Cai G, Bi S, Zhang X. Improved TV Image Denoising over Inverse Gradient. Symmetry. 2023; 15(3):678. https://doi.org/10.3390/sym15030678
Chicago/Turabian StyleLi, Minmin, Guangcheng Cai, Shaojiu Bi, and Xi Zhang. 2023. "Improved TV Image Denoising over Inverse Gradient" Symmetry 15, no. 3: 678. https://doi.org/10.3390/sym15030678