
Analytical Solutions for a New Form of the Generalized q-Deformed Sinh–Gordon Equation:
 , ,
, ,  and
and 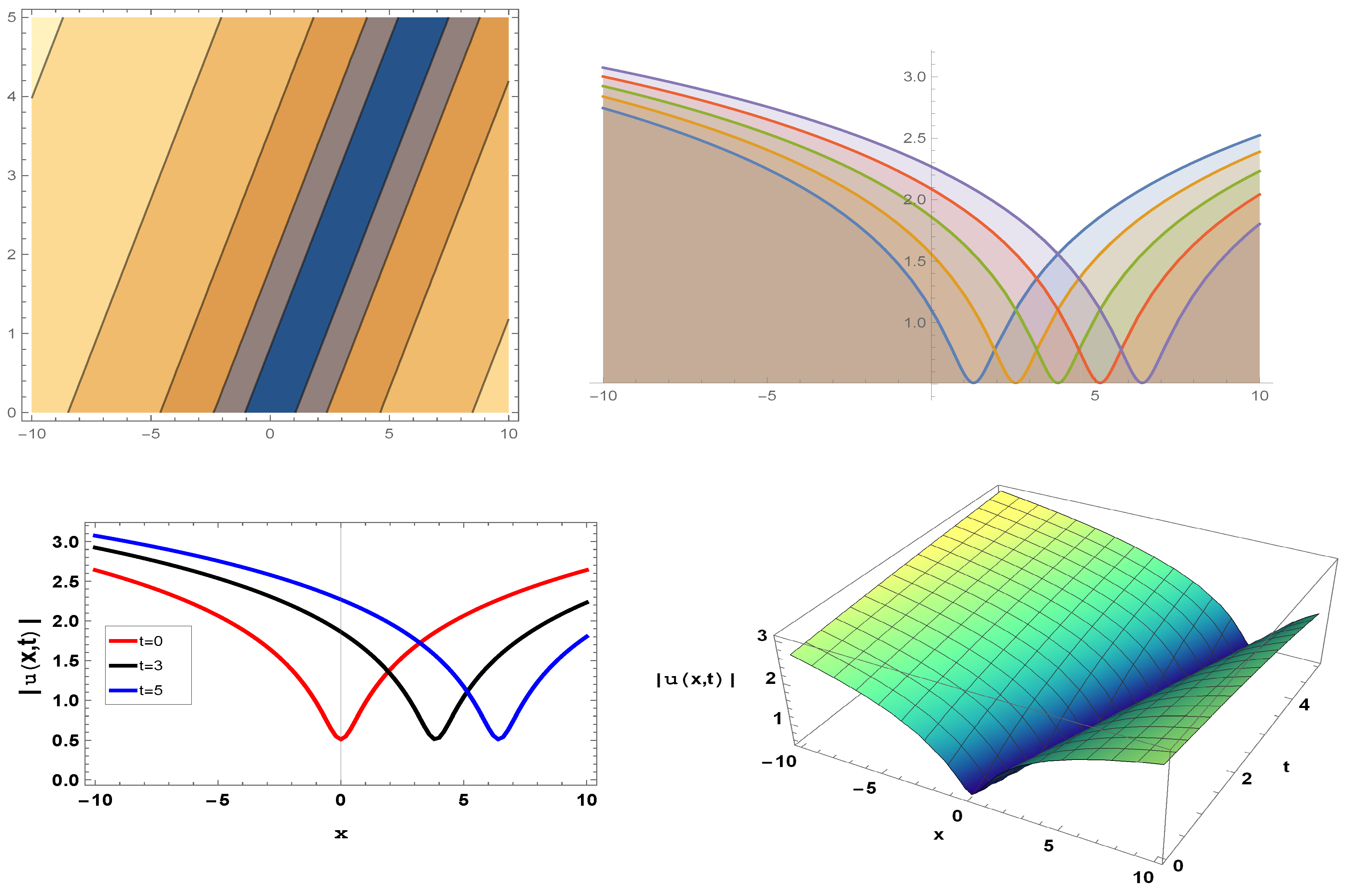{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Mathematical Examination of the Model
- Case one:
- Case two:
- Case three: Assume that
3. The Strategy of the Kudryashov Technique
- Step 1:
- Suppose the solution of (20) can be expressed as follows:where are constants that may be found using the homogeneous balancing principle that determines N.
- Step 2:
- The ordinary differential equation is fulfilled by the function :The solution to (22) is as follows:
- Step 3:
- Step 4:
- We determine the solution of (19) by solving this system.
4. Soliton Solutions for the Model
- Case1::
- Case 2::
- Case 3::
- Set one:
- Set two:
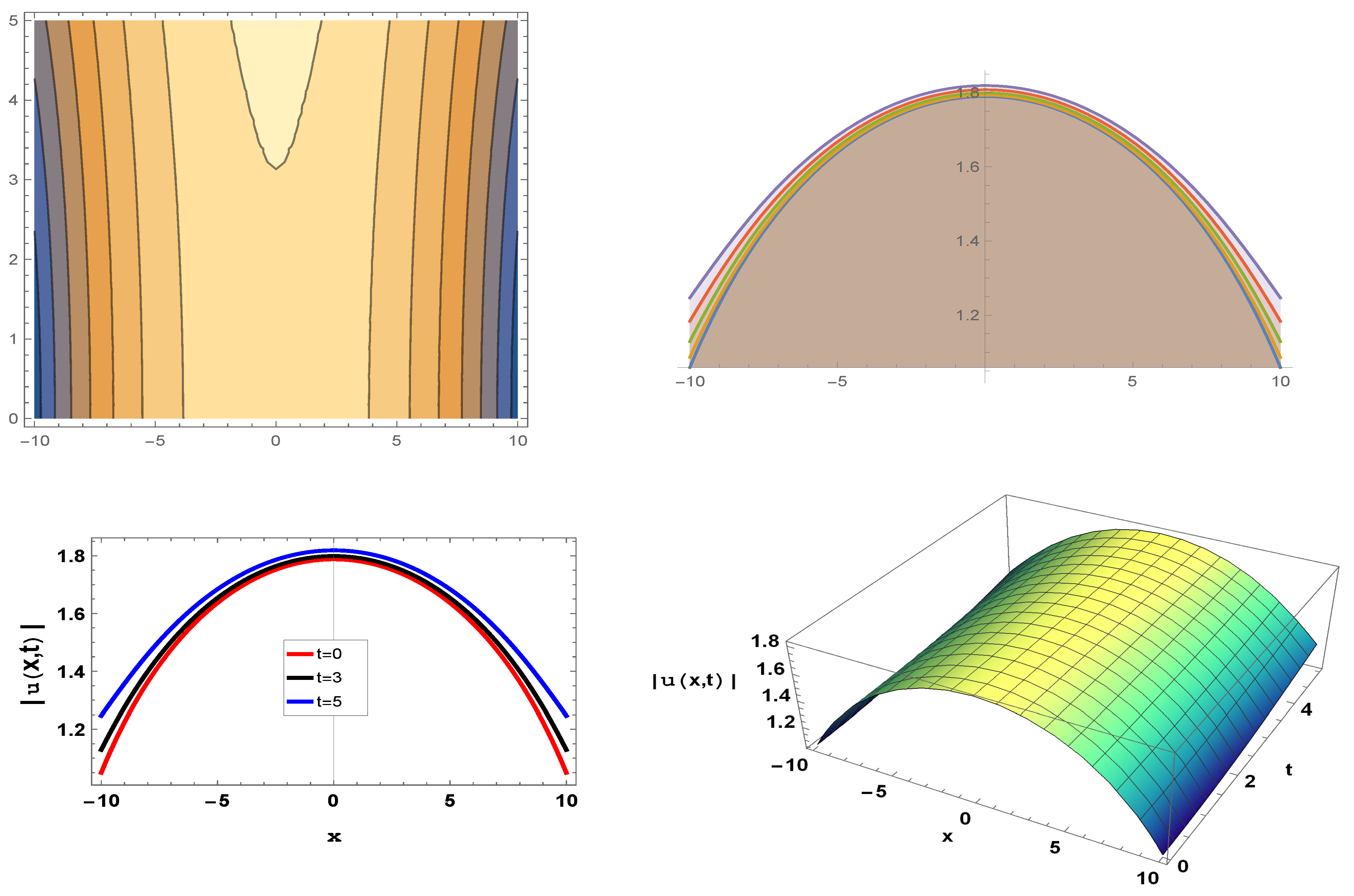
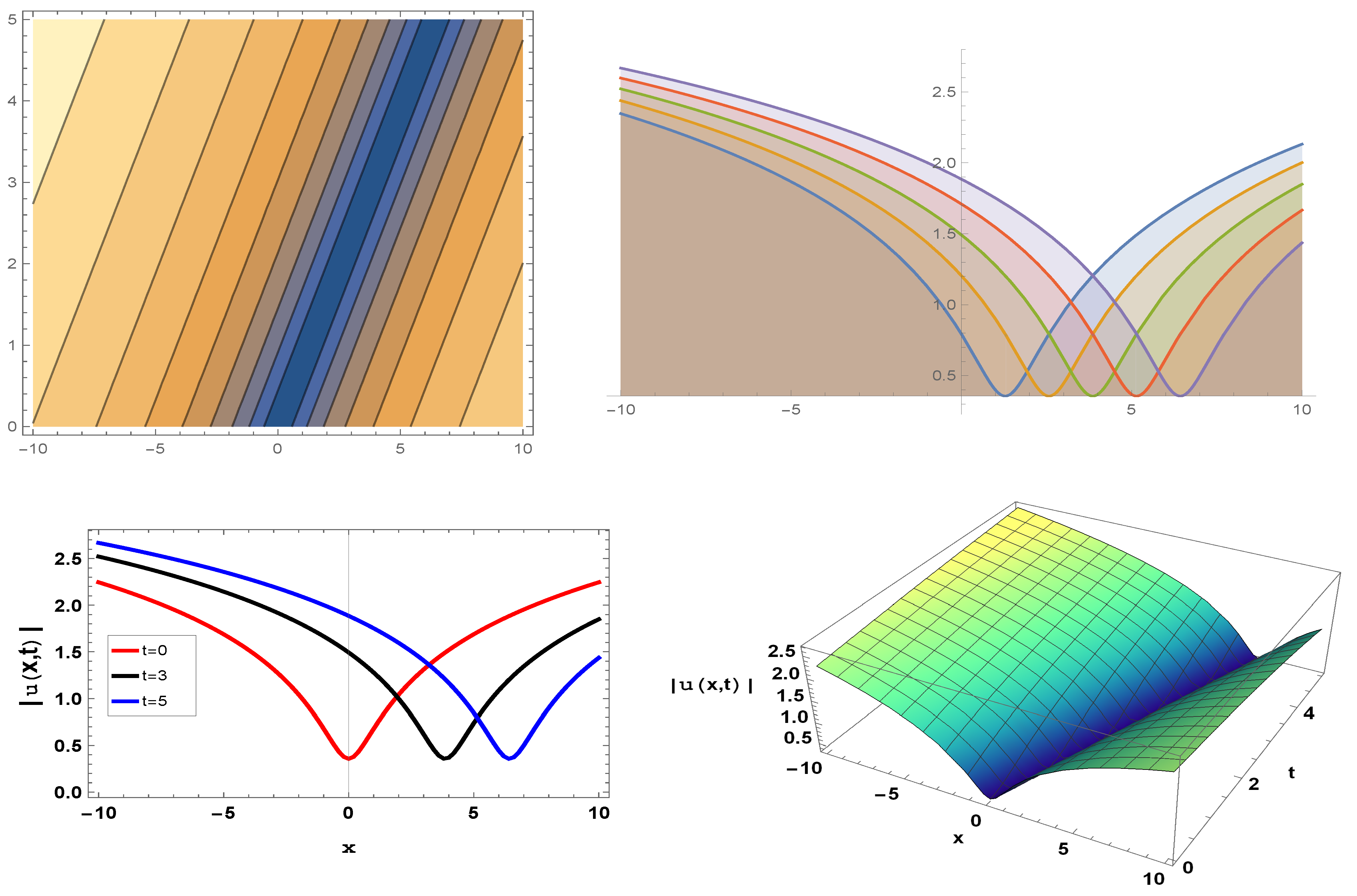
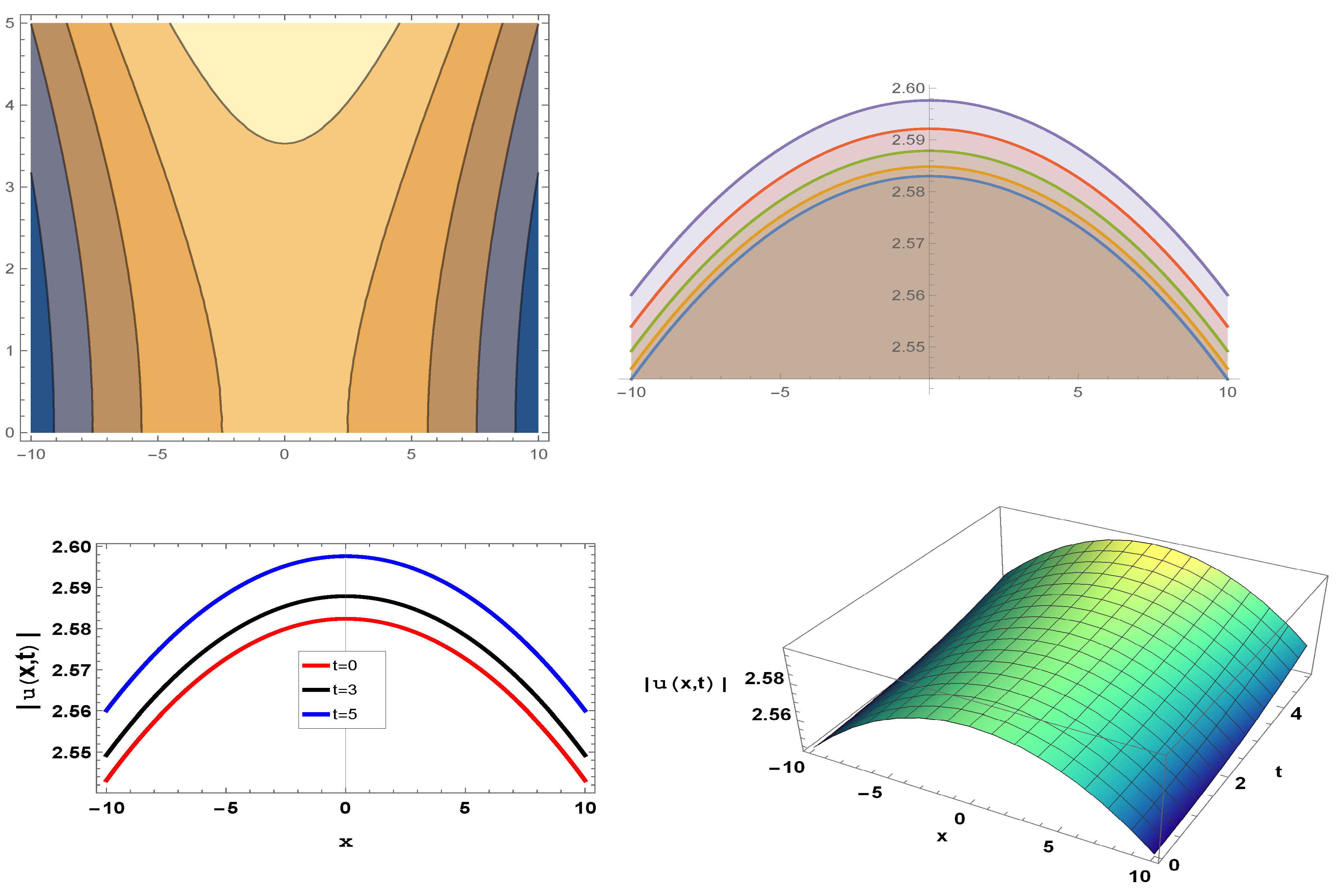
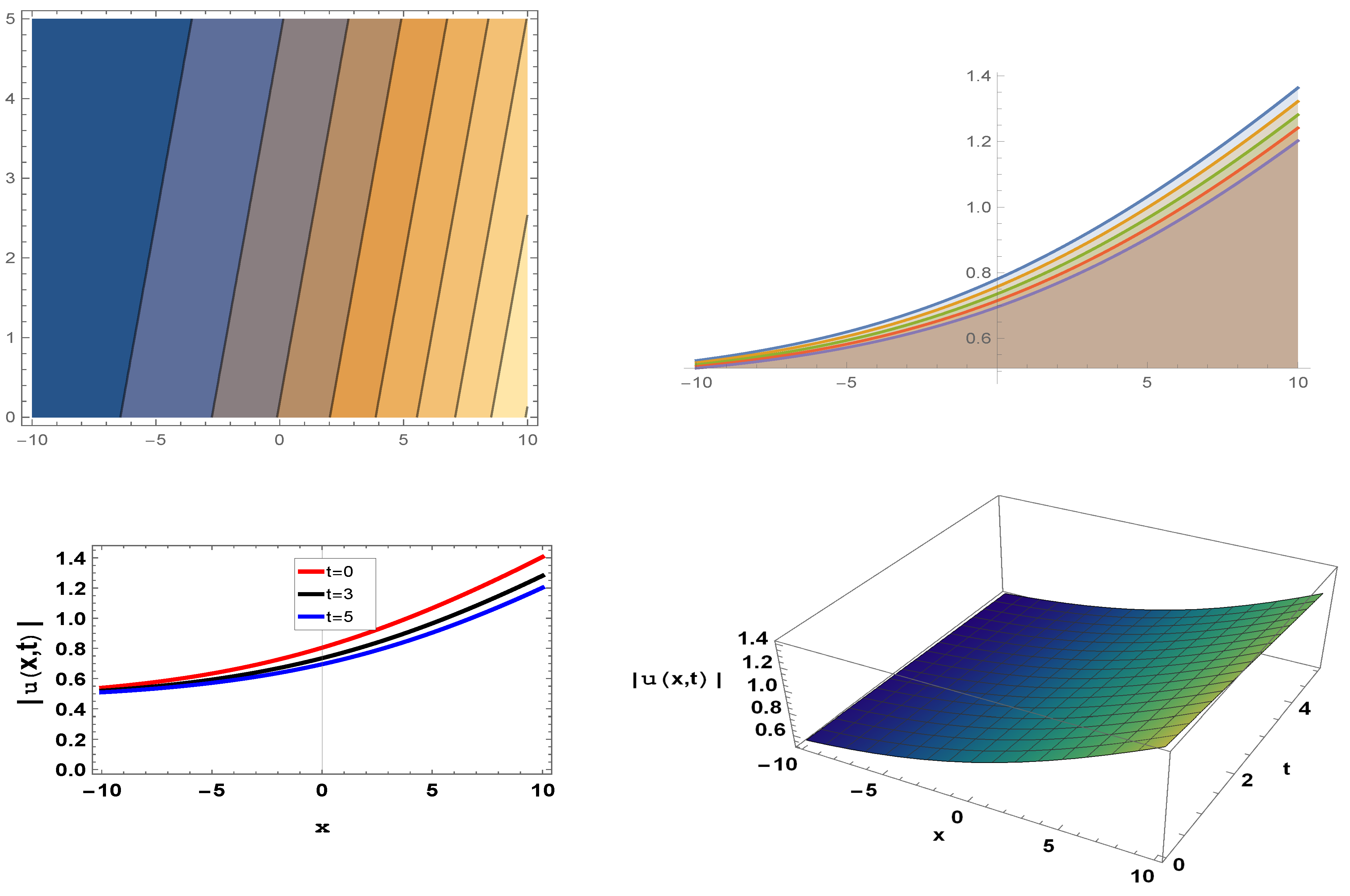
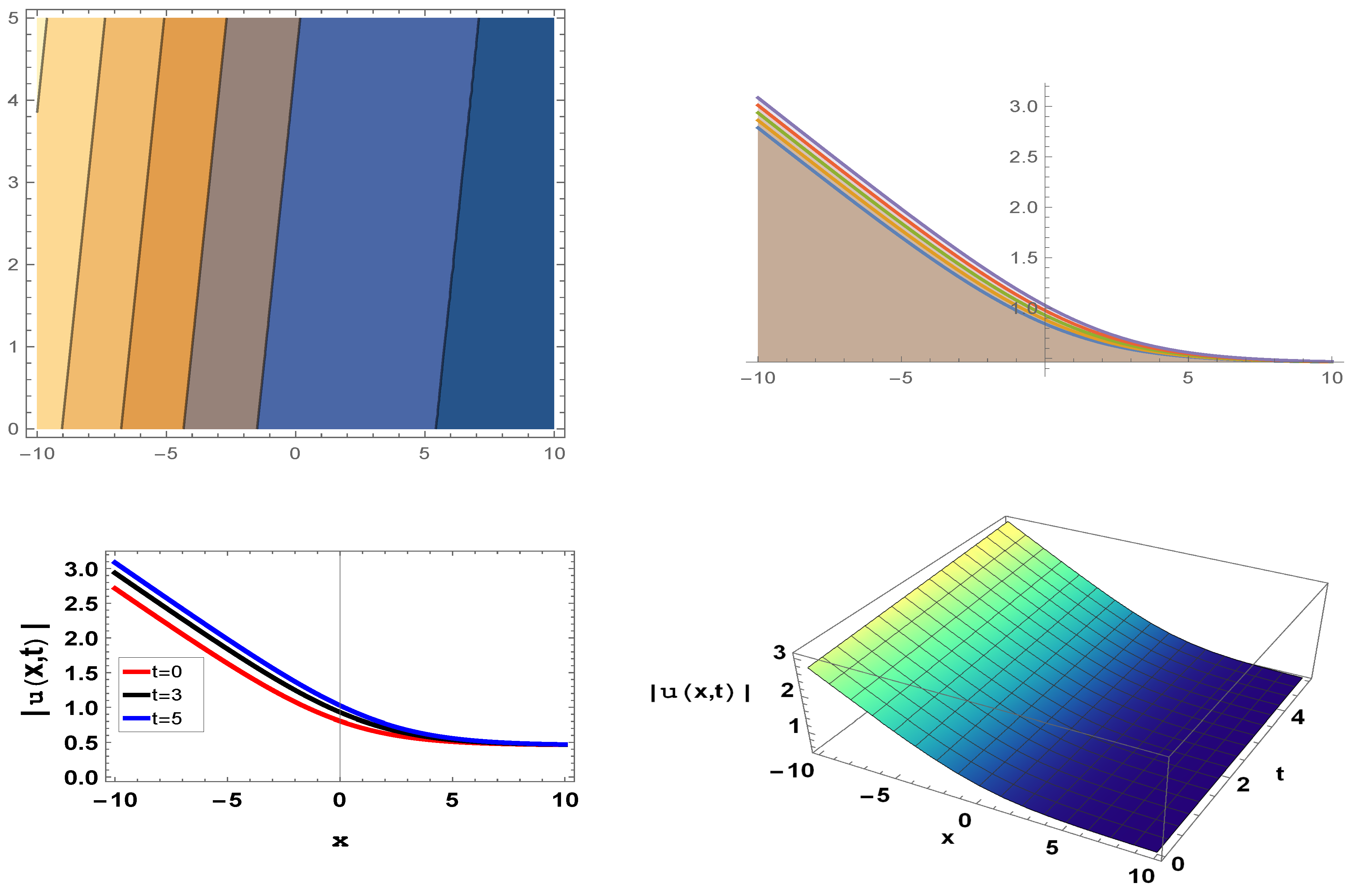
5. Illustrations with Graphics
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yusuf, A.; Sulaiman, T.A.; Mirzazadeh, M.; Hosseini, K. M-truncated optical solitons to a nonlinear Schrodinger equation describing the pulse propagation through a two-mode optical fiber. Opt. Quantum. Electron. 2021, 53, 1–17. [Google Scholar] [CrossRef]
- Boutabba, N. Kerr-effect analysis in a three-level negative index material under magneto cross-coupling. J. Opt. 2018, 20, 025102. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Lanre, A.; Mohammad, M.; Kamyar, H. Solitons and other solutions of perturbed nonlinearBiswas–Milovic equation with Kudryashov’s lawof refractive index. Nonlinear Anal. Model. Control. 2022, 27, 479–495. [Google Scholar]
- Abdel-Aty, A.H.; Khater, M.M.; Attia, R.A.; Abdel-Aty, M.; Eleuch, H. On the New Explicit Solutions of the Fractional Nonlinear Spacetime Nuclear Model. Fractals 2020, 28, 2040035. [Google Scholar] [CrossRef]
- Raslan, K.R.; Ali, K.K. Numerical study of MHD-duct flow using the two-dimensional finite difference method. Appl. Math. Inf. Sci. 2020, 14, 693–697. [Google Scholar]
- Boutabba, N.; Eleuch, H.; Bouchriha, H. Thermal bath effect on soliton propagation in three-level atomic system. Synth. Met. 2009, 159, 1239–1243. [Google Scholar] [CrossRef]
- Zafar, A.; Raheel, M.; Ali, K.K.; Razzaq, W. On optical soliton solutions of new Hamiltonian amplitude equation via Jacobi elliptic functions. Eur. Phys. J. Plus 2020, 135, 674. [Google Scholar] [CrossRef]
- Eleuch, H.; Nessib, N.B.; Bennaceur, R. Quantum Model of emission in weakly non ideal plasma. Eur. Phys. J. D 2004, 29, 391. [Google Scholar] [CrossRef]
- Saha, A.; Ali, K.K.; Rezazadeh, H.; Ghatani, Y. Analytical optical pulses and bifurcation analysis for the traveling optical pulses of the hyperbolic nonlinear Schrödinger equation. Opt. Quantum Electron. 2021, 53, 150. [Google Scholar] [CrossRef]
- Sharifi, B.; Naderi, D. The effect of deformation and orientation of colliding nuclei on synthesis of superheavy elements. Nucl. Phys. A 2019, 991, 121616. [Google Scholar] [CrossRef]
- Lynch, D.R.; O’Neill, K. Continuously deforming finite elements for the solution of parabolic problems, with and without phase change. Int. J. Numer. Meth. Engng. 1981, 17, 81–96. [Google Scholar] [CrossRef]
- Ching, C.L.; Ng, W.K. Generalized coherent states under deformed quantum mechanics with maximum momentum. Phys. Rev. D 2013, 88, 084009. [Google Scholar] [CrossRef]
- Berra-Montiel, J.; Molgado, A. Coherent representation of fields and deformation quantization. Int. J. Geom. Methods Mod. Phys. 2020, 17, 2050166. [Google Scholar] [CrossRef]
- Holmes, D.P. Elasticity and stability of shape-shifting structures. Curr. Opin. Colloid Interface Sci. 2019, 40, 118–137. [Google Scholar] [CrossRef]
- Eleuch, H. Some analytical solitary wave solutions for the generalized q-deformed Sinh-Gordon equation Hindawi Adv. Math. Phys. 2018, 2018, 5242757. [Google Scholar]
- Raza, N.; Arshed, S.; Alrebdi, H.I.; Abdel-Aty, A.H.; Eleuch, H. Abundant new optical soliton solutions related to q-deformed Sinh-Gordon model using two innovative integration architectures. Results Phys. 2022, 35, 105358. [Google Scholar] [CrossRef]
- Ali, K.K.; Abdel-Aty, A.H.; Eleuch, H. New soliton solutions for the conformal time derivative q-deformed physical model. Results Phys. 2022, 42, 105993. [Google Scholar] [CrossRef]
- Ali, K.K.; Al-Harbi, N.; Abdel-Aty, A.H. Traveling wave solutions to (3 + 1) conformal time derivative generalized q-deformed Sinh-Gordon equation. Alex. Eng. J. 2023, 65, 233–243. [Google Scholar] [CrossRef]
- Alrebdi, H.I.; Raza, N.; Arshed, S.; Butt, A.R.; Abdel-Aty, A.H.; Cesarano, C.; Eleuch, H. A Variety of New Explicit Analytical Soliton Solutions of q-Deformed Sinh-Gordon in (2+1) Dimensions. Symmetry 2022, 14, 2425. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ali, K.K.; Alrebdi, H.I.; Alsaif, N.A.M.; Abdel-Aty, A.-H.; Eleuch, H.
Analytical Solutions for a New Form of the Generalized q-Deformed Sinh–Gordon Equation:
Ali KK, Alrebdi HI, Alsaif NAM, Abdel-Aty A-H, Eleuch H.
Analytical Solutions for a New Form of the Generalized q-Deformed Sinh–Gordon Equation:
Ali, Khalid K., Haifa I. Alrebdi, Norah A. M. Alsaif, Abdel-Haleem Abdel-Aty, and Hichem Eleuch.
2023. "Analytical Solutions for a New Form of the Generalized q-Deformed Sinh–Gordon Equation: