


An Algorithm for Solving Common Points of Convex Minimization Problems with Applications


Abstract
:1. Introduction
2. Preliminaries
- (I)
- For every exists;
- (II)
- where is the set of all weak-cluster points of
3. Main Results
- ►
- and are convex and differentiable functions from to
- ►
- and are Lipschitz continuous with constants and respectively;
- ►
- and are convex and proper lower semi-continuous functions from to
- ►
| Algorithm 1: Given: Choose and |
Fordo end for. |
- (A1)
- for some with and ;
- (A2)
- and ;
- (A3)
- such that and as .
- (i)
- where and
- (ii)
- converges weakly to common point in
| Algorithm 2: Given: Choose and |
Fordo end for. |
- (A1)
- , for some with and ;
- (A2)
- and ;
- (A3)
- such that as .
- (i)
- where and
- (ii)
- converges weakly to a point in
4. Applications
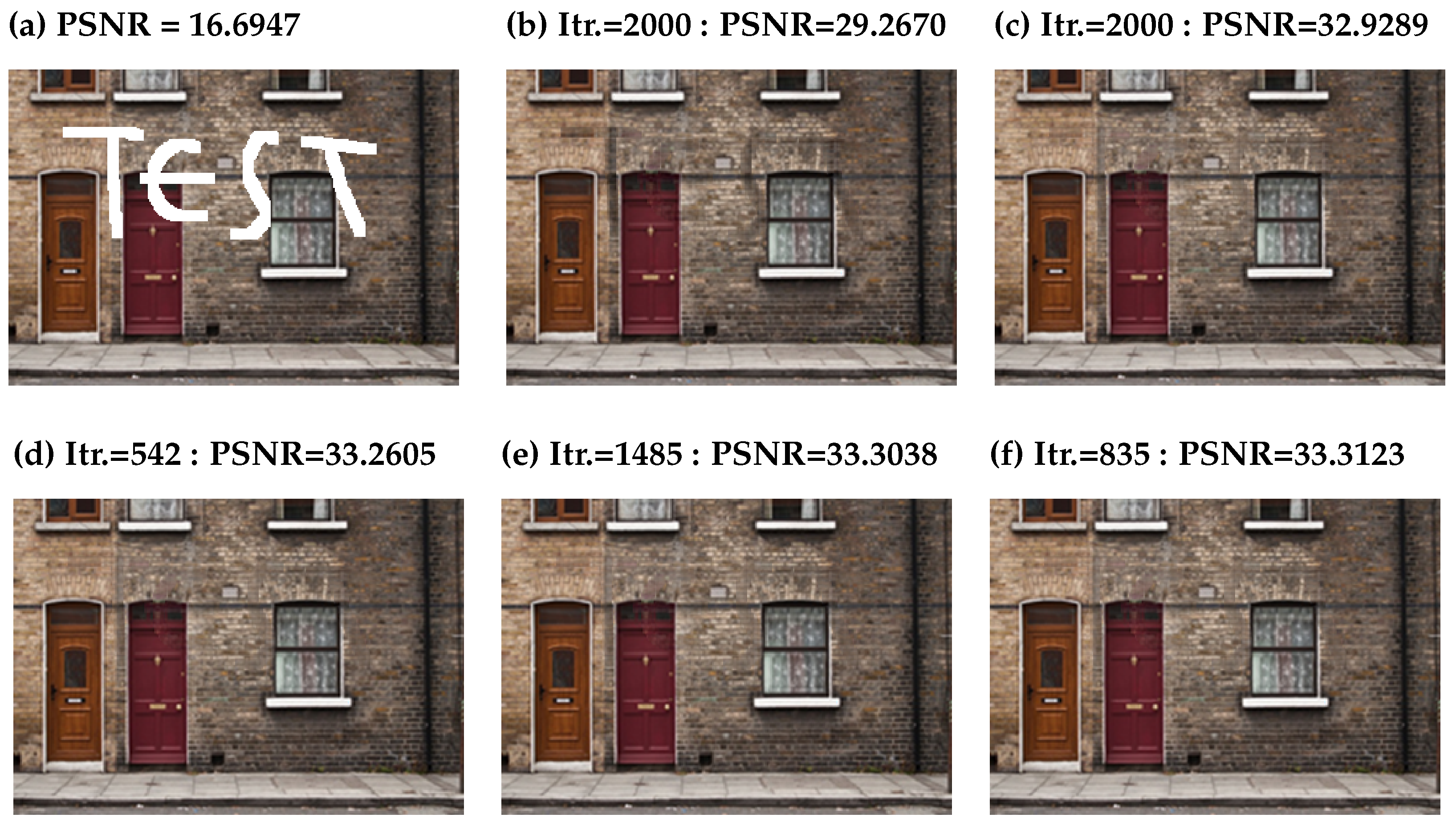
4.1. Image Inpainting Problems
| Algorithm 3: Given: Choose and |
Fordo end for. |
| Algorithm 4: An inertial three-operator splitting (iTOS) algorithm [13]. |
Let and where For , let
where is nondecreasing with and for all and such that
|
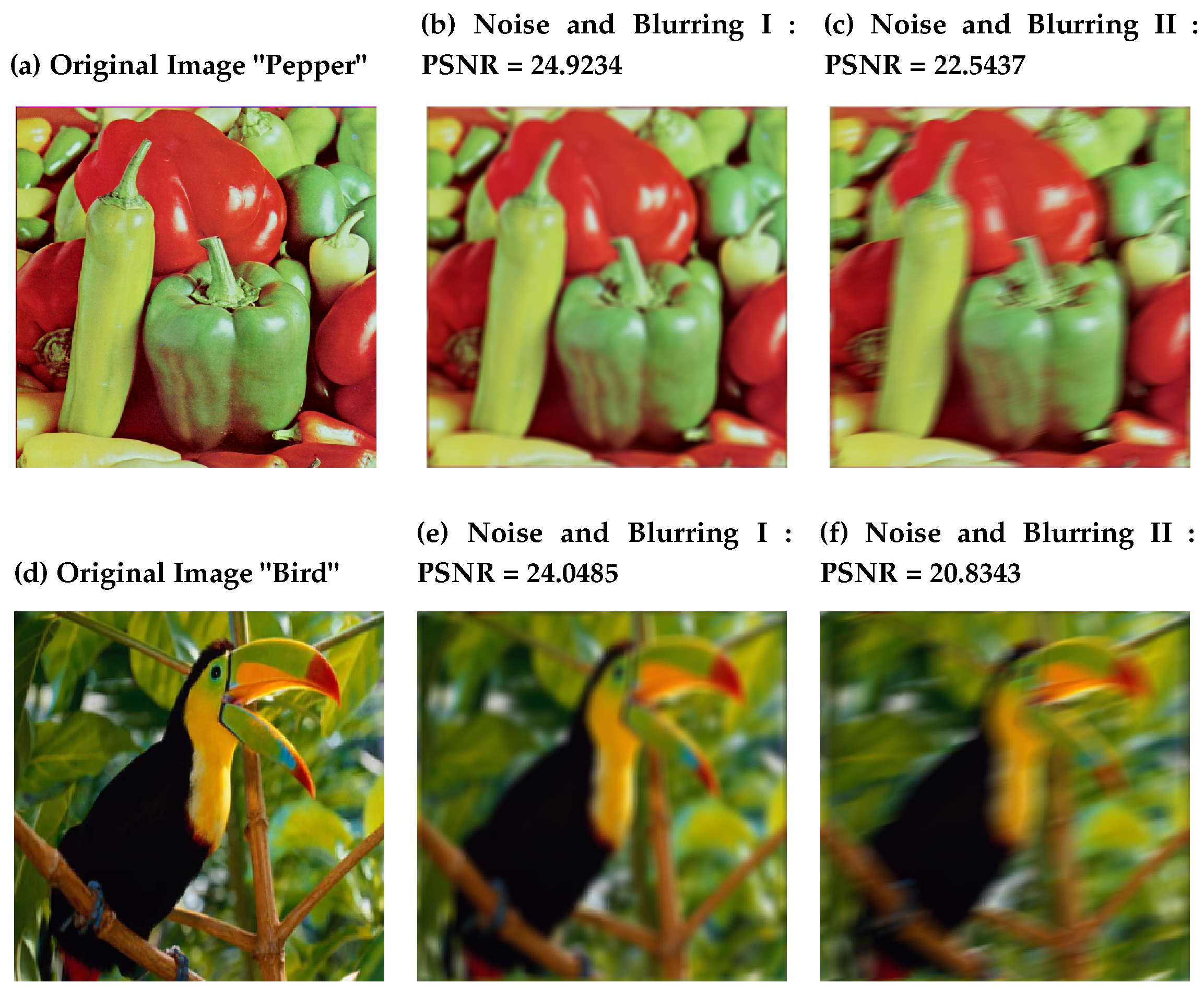
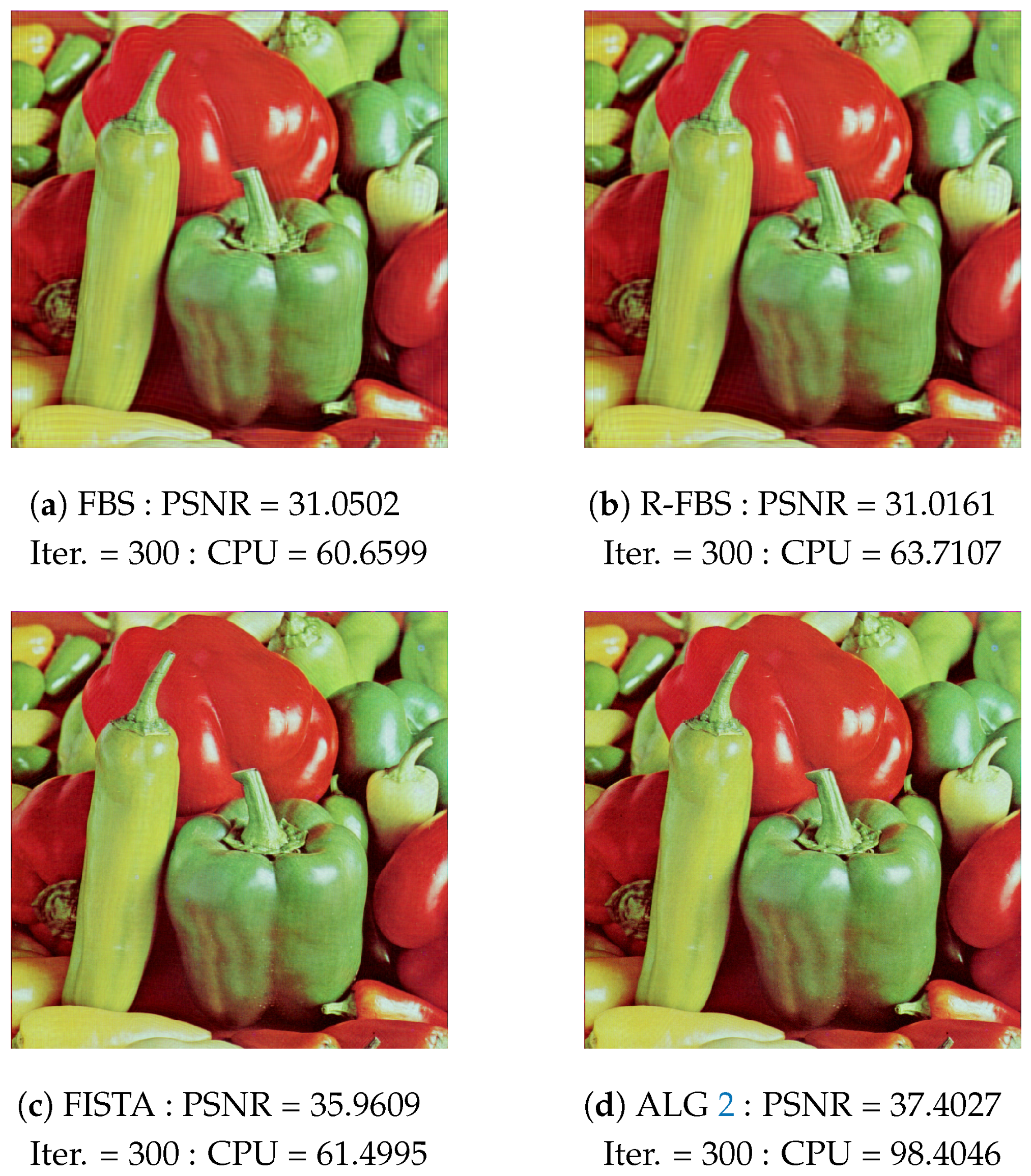
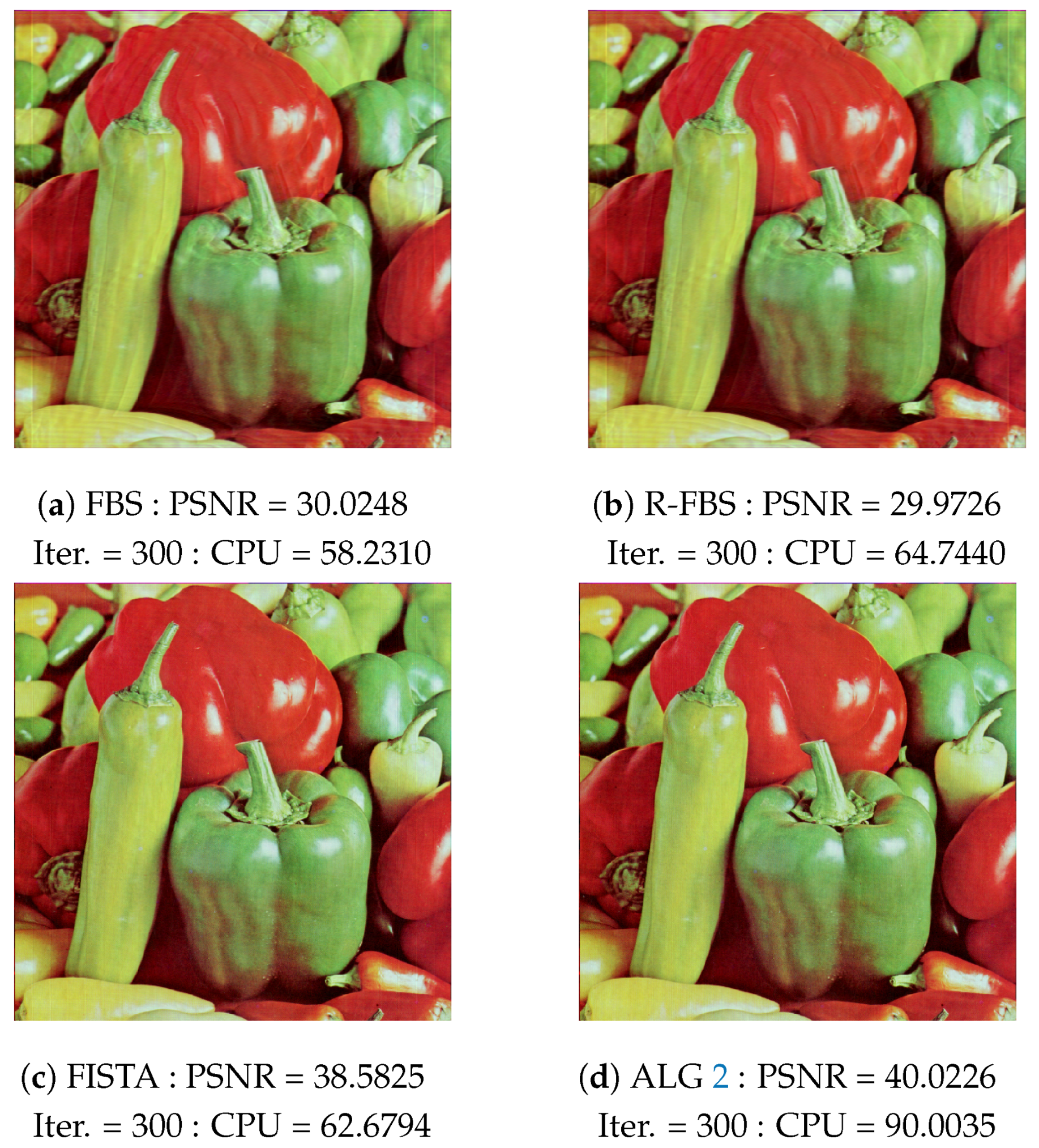
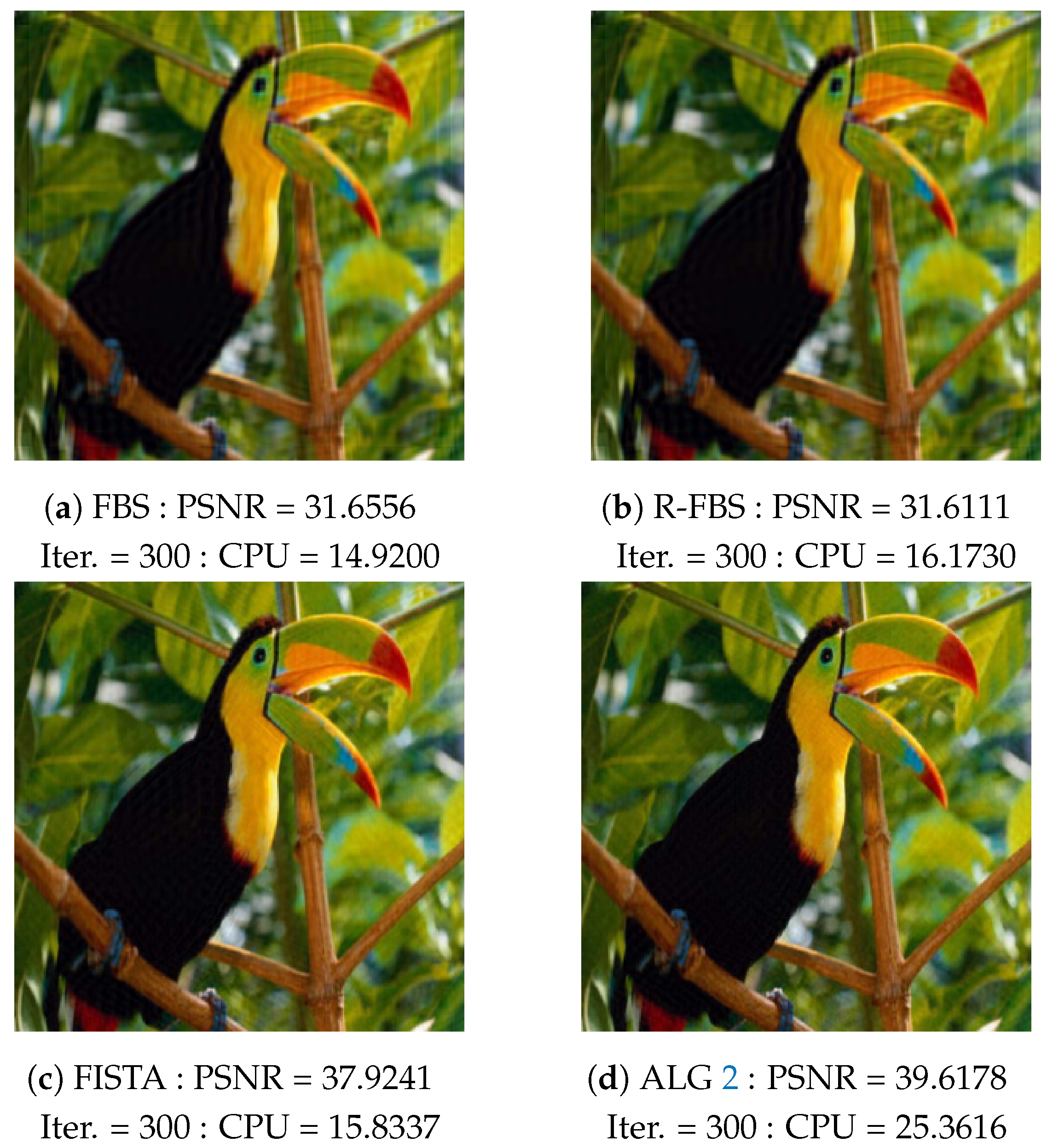
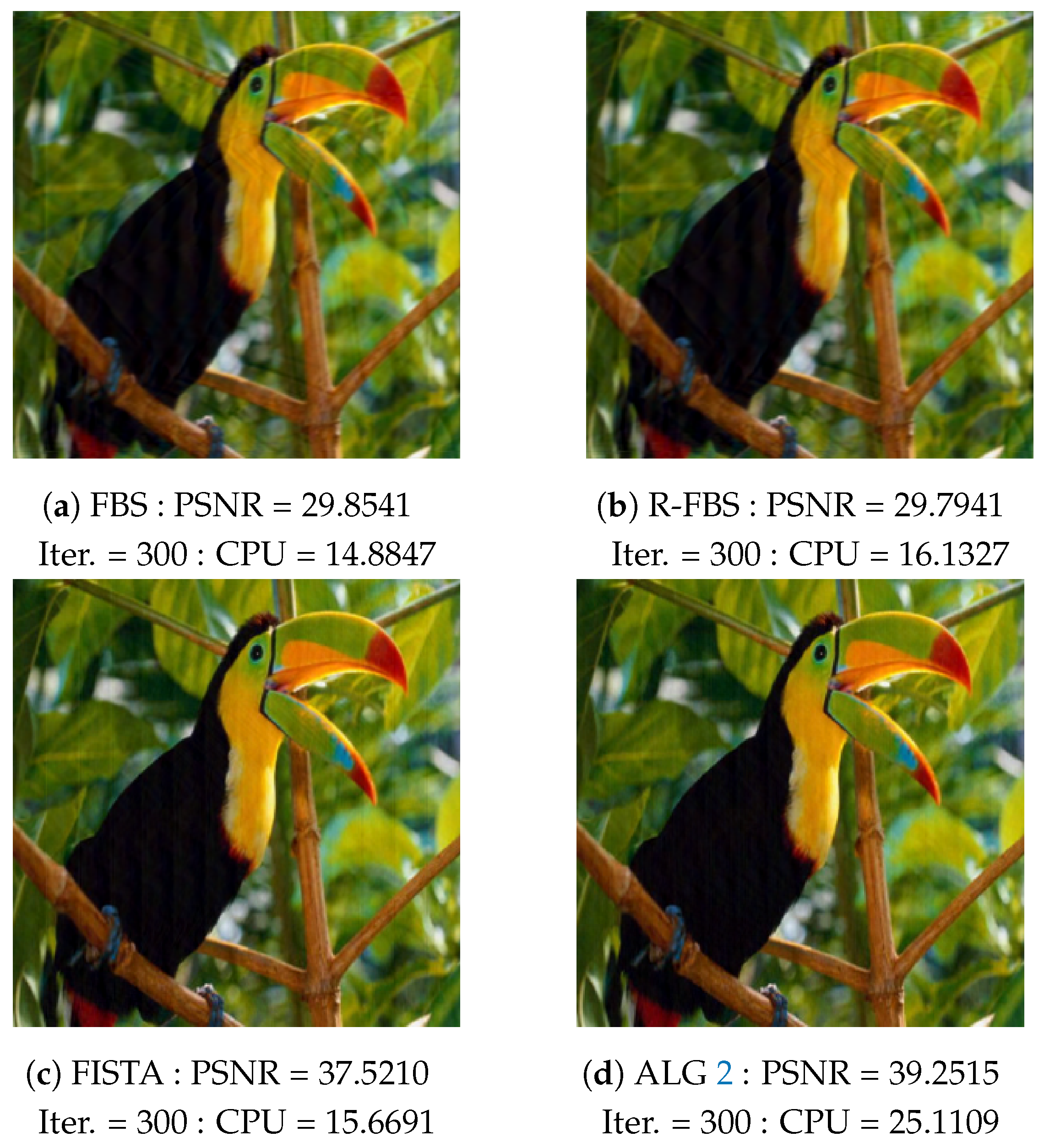
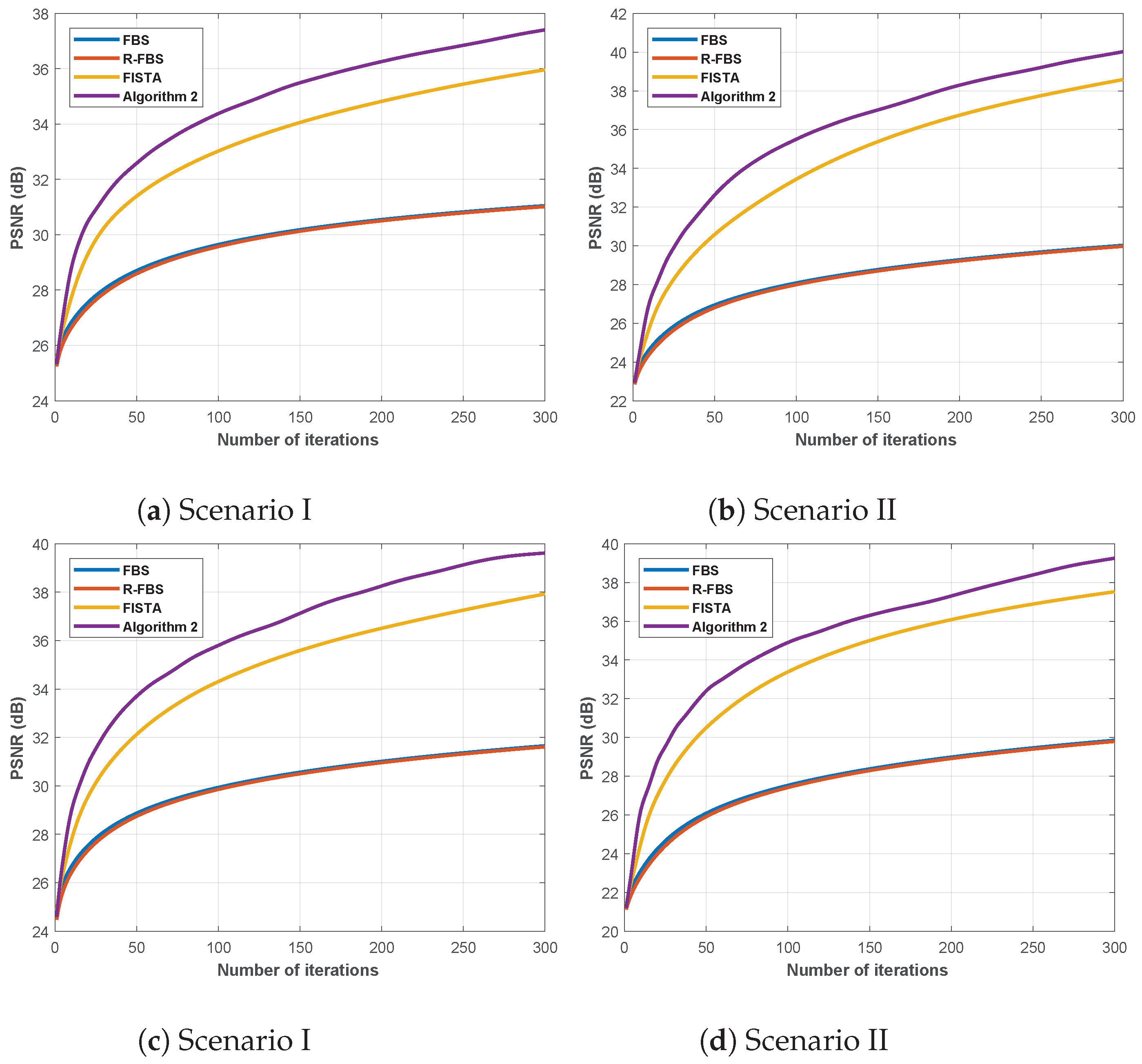
4.2. Image Restoration Problems
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bertsekas, D.P.; Tsitsiklis, J.N. Parallel and Distributed Computation: Numerical Methods; Athena Scientific: Belmont, MA, USA, 1997. [Google Scholar]
- Combettes, P.L.; Pesquet, J.C. A Douglas-Rachford splitting approach to nonsmooth convex variational signal recovery. IEEE J. Sel. Top. Signal Process. 2007, 1, 564–574. [Google Scholar] [CrossRef]
- Combettes, P.L.; Wajs, V.R. Signal recovery by proximal forward-backward splitting. Multiscale Model. Simul. 2005, 4, 1168–1200. [Google Scholar] [CrossRef] [Green Version]
- Hanjing, A.; Suantai, S. An inertial alternating projection algorithm for convex minimization problems with applications to signal recovery problems. J. Nonlinear Convex Anal. 2022, 22, 2647–2660. [Google Scholar]
- Lin, L.J.; Takahashi, W. A general iterative method for hierarchical variational inequality problems in Hilbert spaces and applications. Positivity 2012, 16, 429–453. [Google Scholar] [CrossRef]
- Lions, P.L.; Mercier, B. Splitting algorithms for the sum of two nonlinear operators. SIAM J. Numer. Anal. 1979, 16, 964–979. [Google Scholar] [CrossRef]
- Martinet, B. Régularisation d’inéquations variationnelles par approximations successives. Rev. Fr. D’Inform. Rech. Oper. 1970, 4, 154–158. [Google Scholar]
- Yatakoat, P.; Suantai, S.; Hanjing, A. On some accelerated optimization algorithms based on fixed point and linesearch techniques for convex minimization problems with applications. Adv. Contin. Discret. Model. 2022, 25. [Google Scholar] [CrossRef]
- Suantai, S.; Jailoka, P.; Hanjing, A. An accelerated viscosity forward-backward splitting algorithm with the linesearch process for convex minimization problems. J. Inequal. Appl. 2021, 42. [Google Scholar] [CrossRef]
- Rockafellar, R.T. Monotone operators and the proximal point algorithm. SIAM J. Control Optim. 1976, 17, 877–898. [Google Scholar] [CrossRef] [Green Version]
- Aremu, K.O.; Izuchukwu, C.; Grace, O.N.; Mewomo, O.T. Multi-step iterative algorithm for minimization and fixed point problems in p-uniformly convex metric spaces. J. Ind. Manag. Optim. 2020, 13, 2161–2180. [Google Scholar] [CrossRef] [Green Version]
- Bot, R.I.; Csetnek, E.R.; Hendrich, C. Inertial Douglas-Rachford splitting for monotone inclusion problems. Appl. Math. Comput. 2015, 256, 472–487. [Google Scholar] [CrossRef] [Green Version]
- Cui, F.; Tang, Y.; Yang, Y. An inertial three-operator splitting algorithm with applications to image inpainting. arXiv 2019, arXiv:1904.11684. [Google Scholar]
- Hanjing, A.; Suantai, S. A fast image restoration algorithm based on a fixed point and optimization. Mathematics 2020, 8, 378. [Google Scholar] [CrossRef]
- Thongpaen, P.; Wattanataweekul, R. A fast fixed-point algorithm for convex minimization problems and its application in image restoration problems. Mathematics 2021, 9, 2619. [Google Scholar] [CrossRef]
- Suantai, S.; Kankam, K.; Cholamjiak, P. A novel forward-backward algorithm for solving convex minimization problem in Hilbert spaces. Mathematics 2020, 8, 42. [Google Scholar] [CrossRef] [Green Version]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef] [Green Version]
- Bussaban, L.; Suantai, S.; Kaewkhao, A. A parallel inertial S-iteration forward-backward algorithm for regression and classification problems. Carpathian J. Math. 2020, 36, 35–44. [Google Scholar] [CrossRef]
- Burachik, R.S.; Iusem, A.N. Set-Valued Mappings and Enlargements of Monotone Operator; Springer Science Business Media: New York, NY, USA, 2007. [Google Scholar]
- Opial, Z. Weak convergence of the sequence of successive approximations for nonexpansive mappings. Bull. Am. Math. Soc. 1967, 73, 591–597. [Google Scholar] [CrossRef] [Green Version]
- Nakajo, K.; Shimoji, K.; Takahashi, W. On strong convergence by the hybrid method for families of mappings in Hilbert spaces. Nonlinear Anal. Theory Methods Appl. 2009, 71, 112–119. [Google Scholar] [CrossRef]
- Bauschke, H.H.; Combettes, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces; Springer: New York, NY, USA, 2011. [Google Scholar]
- Tan, K.; Xu, H.K. Approximating fixed points of nonexpansive mappings by the ishikawa iteration process. J. Math. Anal. Appl. 1993, 178, 301–308. [Google Scholar] [CrossRef] [Green Version]
- Moudafi, A.; Al-Shemas, E. Simultaneous iterative methods for split equality problem. Trans. Math. Program. Appl. 2013, 1, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Thung, K.; Raveendran, P. A survey of image quality measures. In Proceedings of the International Conference for Technical Postgraduates (TECHPOS), Kuala Lumpur, Malaysia, 14–15 December 2009; pp. 1–4. [Google Scholar]
- Cai, J.F.; Candes, E.J.; Shen, Z. A singular value thresholding algorithm for matrix completion. SIAM J. Optim. 2010, 20, 1956–1982. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cases | Inertial Parameters |
|---|---|
| I | |
| II | |
| III | |
| IV | |
| V |
| Inertial Parameters | Iter. | CPU | PSNR (dB) | ||
|---|---|---|---|---|---|
| Case I | 2000 | 148.6537 | 23.1486 | 4.6305 × | |
| Case II | 2000 | 148.7307 | 27.1841 | 5.4313 × | |
| 0.5 | Case III | 1225 | 91.3319 | 33.1603 | 9.9616 × |
| Case IV | 2000 | 148.1541 | 33.3112 | 1.8945 × | |
| Case V | 878 | 65.1786 | 33.3264 | 9.9611 × | |
| Case I | 2000 | 147.9165 | 27.1766 | 5.4335 × | |
| Case II | 2000 | 148.2205 | 32.1462 | 2.5990 × | |
| 1 | Case III | 682 | 50.4207 | 33.2415 | 9.9935 × |
| Case IV | 1692 | 125.4178 | 33.3025 | 9.9841 × | |
| Case V | 852 | 62.9013 | 33.3276 | 9.9929 × | |
| Case I | 2000 | 150.4054 | 29.2670 | 4.8888 × | |
| Case II | 2000 | 147.7252 | 32.9289 | 1.2150 × | |
| 1.3 | Case III | 542 | 40.1375 | 33.2605 | 9.9835 × |
| Case IV | 1485 | 109.8176 | 33.3038 | 9.9924 × | |
| Case V | 835 | 61.5336 | 33.3123 | 9.9484 × |
| Parameters | Iter. | CPU | PSNR (dB) | ||
|---|---|---|---|---|---|
| 2000 | 150.3057 | 25.3434 | 5.5297 × | ||
| 2000 | 152.3218 | 23.0876 | 4.6797 × | ||
| 0.5 | 2000 | 151.0935 | 21.4506 | 3.5078 × | |
| 2000 | 161.5143 | 27.0492 | 5.5804 × | ||
| 2000 | 163.1106 | 30.4406 | 3.9901 × | ||
| 2000 | 150.6947 | 30.2252 | 4.7538 × | ||
| 2000 | 150.9510 | 27.0585 | 5.5603 × | ||
| 1 | 2000 | 164.3304 | 23.9033 | 5.0955 × | |
| 2000 | 156.7255 | 30.9755 | 4.0485 × | ||
| 2000 | 158.6223 | 25.3198 | 7.2758 × | ||
| 2000 | 149.7497 | 30.9921 | 4.0100 × | ||
| 2000 | 151.2015 | 29.0476 | 5.2936 × | ||
| 1.3 | 2000 | 153.6181 | 25.3584 | 5.5326 × | |
| 2000 | 155.3317 | 30.3421 | 3.9970 × | ||
| 2000 | 155.7551 | 22.9716 | 9.3178 × |
| Scenarios | Kernel Matrix |
|---|---|
| I | Gaussian blur of filter size with standard deviation |
| II | Motion blur specifying with motion length of 21 pixels and motion orientation |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hanjing, A.; Pholasa, N.; Suantai, S. An Algorithm for Solving Common Points of Convex Minimization Problems with Applications. Symmetry 2023, 15, 7. https://doi.org/10.3390/sym15010007
Hanjing A, Pholasa N, Suantai S. An Algorithm for Solving Common Points of Convex Minimization Problems with Applications. Symmetry. 2023; 15(1):7. https://doi.org/10.3390/sym15010007
Chicago/Turabian StyleHanjing, Adisak, Nattawut Pholasa, and Suthep Suantai. 2023. "An Algorithm for Solving Common Points of Convex Minimization Problems with Applications" Symmetry 15, no. 1: 7. https://doi.org/10.3390/sym15010007