1. Introduction
Chaos in a dynamical system means that the final state of the dynamical system displays exponentially sensitive dependence on the initial state. Based on the importance of chaos, many studies have focused on the subject of chaos in the solar system [
1,
2] and galactic dynamics [
3,
4,
5,
6,
7].
Regular or chaotic motions of particles in galactic dynamics may affect the fraction of mass. The authors of Refs. [
3,
5,
6,
7] investigated mass components of non-rotating N-body models of
elliptical galaxies in ordered and chaotic motion. Voglis et al. [
3] found that the fraction of mass in chaotic motion is about 24% of the total mass in one non-rotating triaxial equilibrium model with smooth centers and 32% in another non-rotating triaxial equilibrium model with smooth centers. This shows that the spatial distribution of the mass in chaotic motion is in disagreement with that in ordered motion. Muzzio et al. [
7] pointed out that the fraction of mass in chaotic motion of about 53% in models of non-rotating galaxies with smooth centers. On the other hand, the fraction of mass in ordered or chaotic motion was also studied in
spiral galaxies. Voglis et al. [
8] further showed that rotation leads to increasing the fraction of mass in chaotic motion (up to the level of
) and shifting the Lyapunov numbers to larger values in N-body models of rotating galaxies. In other words, the extent of chaos is substantially enhanced by the rotation, and the fractions of mass in chaotic motion in the rotating models are larger than those in the non-rotating models. The spatial distributions of the dynamical structures along the spiral arms at the ends of the bar in the barred-spiral galaxy correspond to those of particles with masses in regular and in chaotic orbits. In fact, the mass in chaotic motion can almost completely form spiral arms emanating from the neighborhood of the Lagrangian points
and
at the ends of the bar in a barred-spiral galaxy. The distribution of mass must be associated with the gravitational forces of particles. Gravity is the main driving mechanism for the formation and the stability of spiral arms in galaxies. The authors of Refs. [
9,
10] developed the Moser analytic series representing the invariant manifolds near the unstable Lagrangian equilibrium points
,
in a rotating barred galaxy. In this way, these series can represent the spiral arms, which are density waves and are composed of chaotic orbits. In addition to the analytical theory, other methods such as the specific finite time Lyapunov characteristic number, the smaller alignment index, the surface of section and the frequency analysis were used to classify the orbits in regular and chaotic cases in barred galaxies [
11,
12,
13,
14,
15].
The onset of chaos in two-dimensional Hamiltonian systems of rotating galaxies in the disc plane in polar coordinates [
10] is due to the inclusion of non-axisymmetric potential perturbations. These perturbations cause the angular momentum with respect to the angle to vary with time, and therefore, the Hamiltonian systems are not integrable. This non-integrability leads to chaos under some circumstances. Reliable numerical results are always required to detect the chaotic behavior. In some cases, extremely long integration times are also required. The adopted computational schemes for the long-term integration of the Hamiltonian systems become crucial to reach better stability and higher precision. The proper choice of the integrators should naturally be symplectic schemes, which preserve the symplectic nature of Hamiltonian dynamics [
16,
17]. Symplectic methods are a class of geometric integration algorithms [
18] and make the local error in the total energy not grow with time. There are standard symplectic methods [
19,
20] that require some evaluations of the force and force-gradient symplectic integrators [
16,
21,
22,
23,
24] that require some evaluations of force gradient in addition to several evaluations of the force. Because of good long-term behavior, the standard symplectic methods have been used in the solar system [
1,
25] and black hole spacetimes [
26,
27,
28,
29,
30,
31]. They are also suitable for the two-dimensional Hamiltonian systems of rotating galaxies in polar coordinates. However, the force-gradient symplectic integrators are not applicable to such Hamiltonian problems because the kinetic energies of the Hamiltonian systems depend on the momenta and spatial coordinates. In fact, they are only adapted to the integrations of Hamiltonian systems, where the kinetic energies are quadratic functions of momenta, and the potential energies are functions of coordinates. Energy errors of the force-gradient symplectic integrators are several orders of magnitude smaller than those of the standard symplectic algorithms of the same order, as was confirmed in the literature [
22,
23,
24]. Recently, our group extended these force-gradient integrators to the explicitly integrable kinetic energies, which are not only quadratic functions of momenta but also depend on coordinates [
32]. When the original force-gradient operator is adjusted appropriately, the adjusted operator lacks the concept of force gradient and belongs to the momentum operator, such as the operator corresponding to the potential. As a result, the existing explicit force-gradient symplectic integrators [
21,
22,
23,
24] are still available in the extended Hamiltonian systems. The extended force-gradient symplectic integrators do not alter their symmetry and time reversibility compared with the existing force-gradient algorithms. The authors of Ref. [
32] used a modified Hénon-Heiles system and a spring pendulum as two toy models to test the numerical performance of the extended algorithms. They showed that the fourth-order Forest–Ruth standard symplectic method does not give true dynamical properties of order and chaos to the modified Hénon–Heiles system under some circumstances, whereas the fourth-order extended force-gradient symplectic methods do. The obtained results are because the Forest–Ruth method performs with poorer accuracy than the extended force-gradient algorithms. In fact, the optimized fourth-order extended force-gradient symplectic methods have energy errors that are three orders of magnitude smaller than those of the Forest–Ruth method.
Note that the extended force-gradient symplectic methods proposed in Ref. [
32] were shown to have good numerical performance in the simulations of the two toy models. Now, we wonder whether the extended algorithms still exhibit excellent performance in the application of real astronomical and astrophysical problems. Evaluating the performance of the extended force-gradient symplectic methods applicable to the three types of models of rotating barred galaxies in Refs. [
8,
10] is one of the main aims of the present paper. On the other hand, we are interested in studying a distribution of dynamical structures regarding regular and chaotic orbits along the radial direction for a given number of the radial terms of the potential in one of the models using the techniques of the Poincaré surface of section and fast Lyapunov indicators (FLIs) [
33]. In this way, we desire to know how the number of the radial terms of the potential affects chaos in one of the models. We also desire to know what differences in the dynamics exist among the three types of models with the same number of radial terms of the potential, energy and initial conditions.
To implement the three aims, we organize this paper as follows. In
Section 2, we introduce three types of models of rotating barred galaxies. In
Section 3, we apply the extended fourth-order force-gradient symplectic methods to Model A4 and evaluate the performance of these algorithms. In
Section 4, we explore the dynamical structures in these models using the techniques of the Poincaré surface of section and FLIs. Finally, the main results are summarized in
Section 5.
2. Models of Rotating Barred Galaxies
The motion of a test particle of mass
in the plane of a galaxy with a rotating bar is described in polar coordinates
in the rotating frame by a two-dimensional Hamiltonian [
8,
10]
The above notations are given here.
is a pattern speed of the rotating frame.
represents the canonical momentum vs. the coordinate
r, and
is the canonical momentum of the coordinate
corresponding to the angular momentum in the rest frame.
denotes the gravitational potential of the galaxy in the rotating frame and satisfies the Poisson equation
where
G is the constant of gravity, and
stands for the density of matter.
A complete expression of the solution of the Poisson equation is long and complicated. Harsoula et al. [
10] took a simple solution of Equation (
2) as the potential for the
mode of the galactic bar
where
,
and
are functions of
r. If
, then the potential
is axisymmetric and the angular momentum
is conserved. When
or
, the potential
is non-axisymmetric and the angular momentum
is not conserved. Namely, the second and third terms of Equation (
3) act as an
mode of the non-axisymmetric potential perturbation. The three potential functions are given in Ref. [
10] by
where
R is a numerical constant for the description of the size of the system. The size is regarded as the N-body code boundary corresponding to the solutions of the Poisson equation matched with the solutions of the Laplace equation. The other notations such as
are expanded in terms of the series of spherical Bessel functions
and
[
34]:
In the above series of expansions of the potential, n represents the number of the radial terms; that is, each of the functions, such as , in the potential has terms. In addition, . For , is the th root of the equation . For , is the solution of the equation . The solution should be restricted in the range and is solved by the Newton iteration method.
The coefficients
,
,
and
in Equations (7)–(10) are obtained through the N-body code on the positions of the N-body particles and Equation (
2). They are different for three types of galactic models, which are called models A, B and C in Ref. [
10]. The properties of the three models were described in the papers [
8,
9,
10]. Here are some of them. Firstly, the total angular momentum is larger in model B than in model A, but smaller than in model C. This leads to decreasing the size of a rotating central bar formed by density waves and increasing the density in the region of the bar along the sequence of models A, B and C. Secondly, the pattern speed of the bar in each of the models becomes smaller, whereas the corotation radius becomes larger at the end of a Hubble time. Thirdly, the degree of chaos is enhanced by rotation, increasing the fraction of mass in chaotic motion. Fourthly, mass in chaotic motion almost completely dominates the formation of spiral arms. Fifthly, invariant manifolds of all unstable periodic orbits near and beyond corotation support both the outer edge of the bar and the spiral arms. Harsoula provided the coefficients in the three models to the first author of the present paper via private communication. The coefficients with
are listed in
Table 1,
Table 2and
Table 3. The 20 coefficients
, the 20 coefficients
and the 40 coefficients
,
(
) in each model are associated with monopole terms, quadrupole terms and triaxial terms, respectively. In practice, each group of the coefficients determines the potential
. Different potentials
correspond to different galactic models. Hereafter, the three models for
, respectively, correspond to models A19, B19 and C19. Similarly, models A9, B9 and C9 are used when
; models A4, B4 and C4 are also used when
.
The unit systems are those of Refs. [
8,
10]. The half mass radius
is used as a scaling unit of length, i.e.,
, where
r stands for the real distance, and
is the scaling radial distance. For convenience, the scaled radial distance is still written as
r in the later discussions. The half mass radius is
for Model A,
for Model B and
for Model C. The size of the system is
. Here, one unit of length is 8 kpc. The unit of time is the half mass crossing time
, where
represents a Hubble time. The pattern speeds of the rotating frame in the three models A, B and C are taken as
,
and
, which correspond to 20∼25 km s
kpc
in real units.
As is mentioned above, the second and third terms of Equation (
3) destroy the axial-symmetry of the system (1) such that the angular momentum
varies with time. Thus, no additional constants of motion but the Hamiltonian
H of Equation (
1) exists. This implies the nonintegrability of the system (1) with two degrees of freedom in a four-dimensional phase space. A numerical method is a good tool for solving this nonintegrable problem.
4. Regular and Chaotic Dynamics
The authors of Ref. [
10] applied the Moser theory of invariant manifolds to the chaotic spiral arms. The invariant manifolds starting at the Lagrangian points
,
, or unstable periodic orbits around
and
are described in terms of series. The convergence of the series is an analytical means for studying chaotic orbits with initial conditions in the neighborhood of the invariant manifolds of the unstable point
or
. A domain of the convergence of the series around every Lagrangian point is a Moser domain. The intersection of the orbits inside the Moser domain with an apocentric section produces the spiral structure of this domain. The chaotic orbits with initial conditions near but in the exterior of the boundary of the Moser domain of convergence become chaotic attractors. Such chaotic orbits are also identified by the techniques of Poincaré sections and fast Lyapunov indicators (FLIs) [
33]. The method of Poincaré sections, which shows intersections of the particles’ trajectories with the surface of section in phase space, can clearly describe the phase space structure of a conservative four-dimensional system. One or several isolated points on the Poincaré sections correspond to periodic orbits. Kolmogorov–Arnold–Moser (KAM) tori on the Poincaré sections correspond to regular quasi-periodic orbits. If there are many plotted points that are distributed randomly in an area, the motion is chaotic. In a word, the distribution of the points in the Poincaré map can show whether or not the motion is chaotic. For ordered and chaotic orbits, the length of a deviation vector increases at completely different time rates. The FLI uses completely different time rates to distinguish between the ordered and chaotic cases. The Moser theory of invariant manifolds, which allows for the study of chaotic orbits, requires that the series describing the Hamiltonian dynamics near an unstable equilibrium point or an unstable periodic orbit be convergent. It may not work well for the non-convergent Birkhoff normal form series around stable invariant points or stable periodic orbits. The techniques of Poincaré sections and FLIs for finding chaos do not have this restriction. Clearly, they can detect chaotic orbits in larger regions compared with the Moser theory of invariant manifolds. Here, we employ the techniques of Poincaré sections and FLIs to investigate the dynamical behavior of the three types of bar spiral galaxy models A, B and C. The considered orbits are not restricted to those around the unstable Lagrangian points
and
. We are mainly interested in comparing the differences in the dynamical behavior among these types of models. The effect of the number
of the radial terms in the series expansions of the potential on the dynamical behavior in each set of models is also considered.
4.1. Models A4, A9 and A19
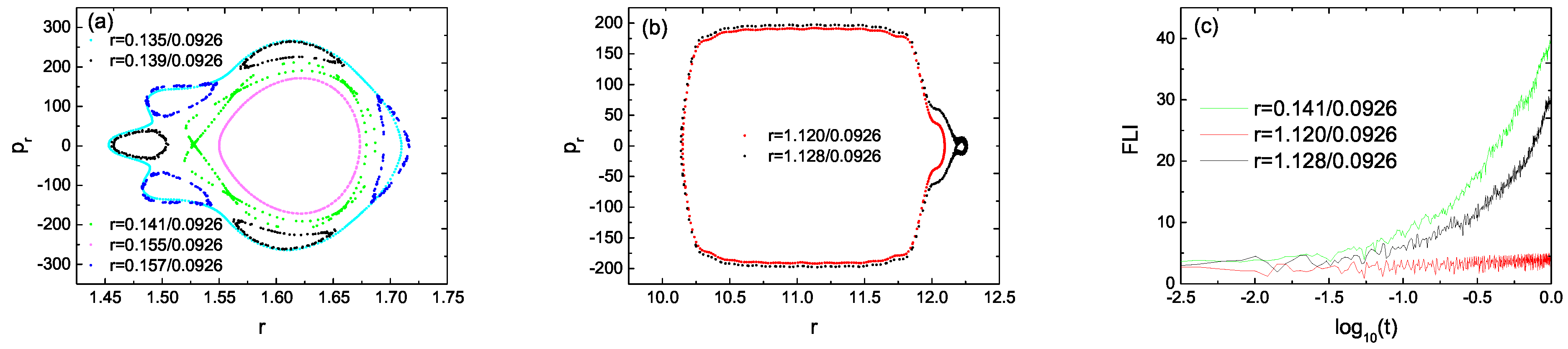
The parameters and initial conditions are those of
Figure 1, but the initial values of
r and
are different. Model A4 exhibits different phase space structures in two ranges of the initial separations
r, as is shown through Poincaré sections at the plane
with
in
Figure 2a,b. The three orbits in
Figure 2a are KAM tori, which correspond to the regularity of the orbits. One orbit with the initial separation
and another orbit with the initial separation
in
Figure 2b seem to have no explicit difference from the phase space structures on the section, but they exhibit different regular and chaotic dynamical features, which can be identified clearly by means of the technique of FLI in
Figure 2c. The FLI is that with two nearby orbits defined in Ref. [
35]:
where
and
are the distances between two nearby orbits at time 0 and
t, respectively. The orbit with the initial separation
corresponds to the FLI increasing in a power law with time
and is regular. However, the orbit with the initial separation
has the FLI increasing in an exponential law with time and should be chaotic. After
integration steps, the FLIs with completely different increasing laws with time are sensitive to distinguishing the two cases of order and chaos.
The phase space structures for Model A9 in
Figure 3a are somewhat unlike those for Model A4 in
Figure 2. When the initial separation
r is given in a small range of
for Model A4, the orbits are regular KAM tori (not plotted). However, the orbit with the initial separation
in Model A9 has several hyperbolic points. Its chaoticity is confirmed by the FLI of
Figure 3c. There are no chaotic orbits in a range of
for Model A4 in
Figure 2a, but there are two chaotic orbits with the initial separations
and
in the range of
for Model A9 in
Figure 2b,c.
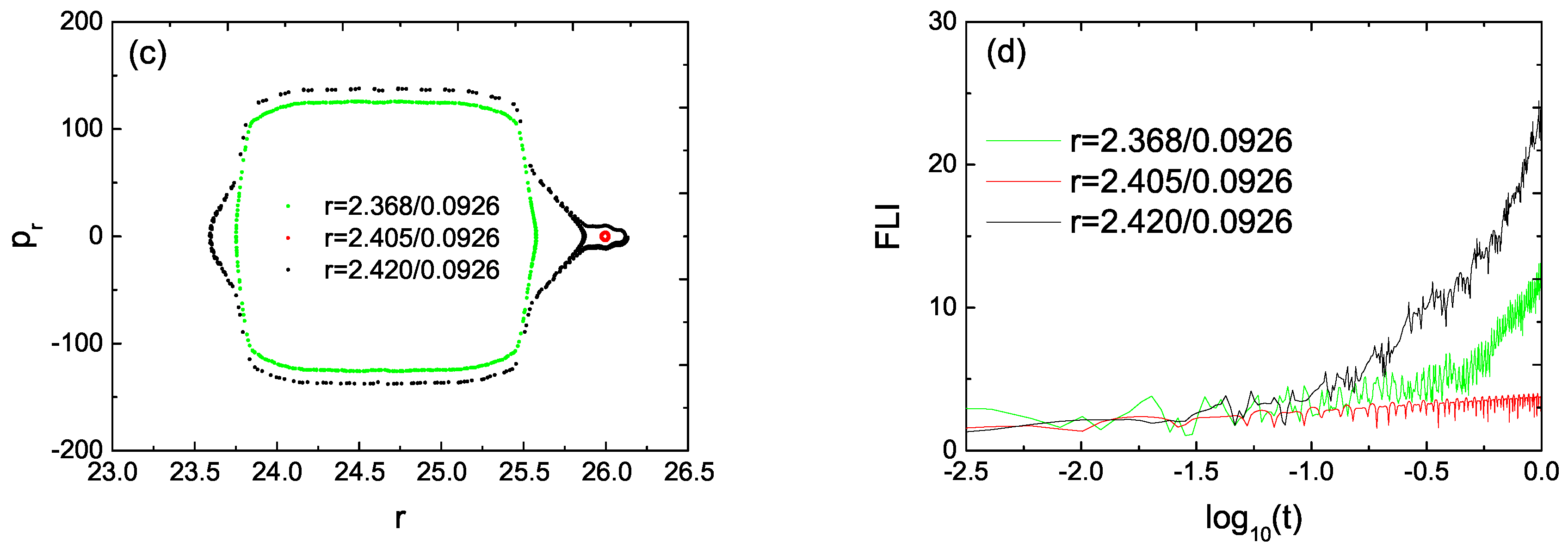
When Model A19 is considered in
Figure 4a, an orbit with the initial separation
is a regular KAM torus. Another orbit with the initial separation
consists of many islands and therefore is still regular. However, the third orbit with the initial separation
is chaotic because it has many discrete points which are randomly filled with an area. The degree of chaos seems to be strengthened in the small range of
from A4 to A9 and to A19. Chaos in the range of
seems to be stronger for A19 in
Figure 4b than for A9 in
Figure 3b. When the initial separation
r spans from 20 to 23 in
Figure 2c, a lot of regular KAM torus orbits exist in the interior of the ordered orbit with the initial separation
. There is a small chaotic region between the two orbits of the initial separations
and
. The regularity of the orbit with the initial separation
and the chaoticity of the orbit with the initial separation
can be identified clearly by means of the technique of FLIs in
Figure 4d.
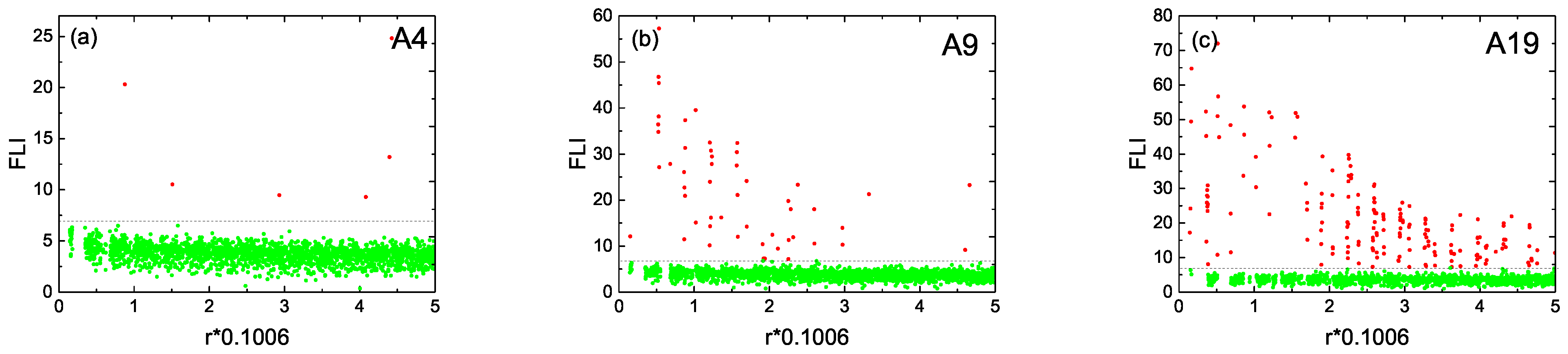
As seen from
Figure 2,
Figure 3 and
Figure 4, the number and degree of chaotic orbits seem to increase as the number of the radial terms
n becomes larger. This result is clearly shown in
Figure 5, which lists the dependence of FLI on the initial separation
r in Models A4, A9 and A19. In other words,
Figure 5 shows that a distribution of the phase space structures of regular and chaotic orbits for each model depends on a range of the initial separation
r. Each of the FLIs is obtained after
integration steps. Seven is a critical value of the FLI between the ordered and chaotic two cases. The FLIs not more than seven indicate the regularity of bounded orbits, whereas those larger than seven correspond to the chaoticity of the bounded orbits. The result of an increase in
n increasing the number and degree of chaotic orbits is based on
n corresponding to the number of the radial terms in the series expansions of the potential. An increase in
n means and increases in the number of radial terms. Equivalently, the nonlinear gravitational interaction effects in the potential are enhanced.
4.2. Models B4, B9 and B19
Figure 6 describes the phase space structures of Model B4 in two ranges of the initial separations
r. There is a weak chaotic orbit with the initial separation
in the range of
in
Figure 6a. The two orbits in the range of
are regular KAM tori in
Figure 6b. However, chaos occurs for the initial separation
in the range of
in
Figure 4c. The dynamical features of the chaotic orbit in panel (a) and the two orbits in panel (c) are also shown in
Figure 6d. The phase space structures of Model B4 in
Figure 6b,c are similar to those of Model A4 in
Figure 2a,b.
The phase space structures of Model B9 in
Figure 7a,b also look like those of Model A9 in
Figure 3a,b. The initial separations
and
correspond to two regular orbits consisting of three loops in
Figure 7a. Chaos is present for
in
Figure 7a and
in
Figure 7b, as the FLIs of
Figure 7c show.
Model B19 seems to have stronger chaos in the ranges of
and
in
Figure 8a,b than Model B9 in
Figure 7a,b. For the initial separation
r belonging to the range of
, the orbital dynamical behavior for Model B19 in
Figure 8a is greatly different from that for Model A19 in
Figure 4a. However, the phase space structures of Model B19 in
Figure 8b,c also resemble those of Model A19 in
Figure 4b,c. The FLIs of
Figure 8d support the chaoticity of the two orbits for
and
in
Figure 8c.
The relation between the FLI and the initial separation
r in
Figure 9 clearly shows that the number and degree of chaotic orbits in the B models increase with an increase in
n.
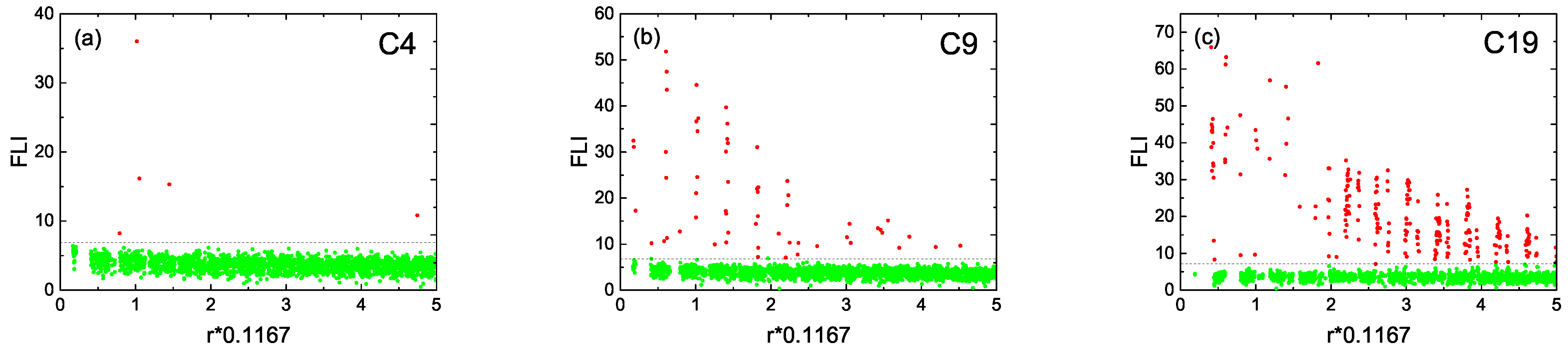
4.3. Models C4, C9 and C19
As far as the C models are concerned, chaos seems to become stronger in the range of
from
in
Figure 10a to
in
Figure 10c and
in
Figure 10e. The result is also suitable for the range of
in
Figure 10b,d,f. The relation between the FLI and the initial separation
r in
Figure 11 supports that chaos becomes stronger with an increase in
n.
Several points can be concluded from the above demonstrations. The three types of models, A, B and C, have the same expressions but have differences in the pattern speeds
and the coefficients
,
,
and
. The three models have similar dynamical behaviors when they have the same radial term number
n, energy
E and initial conditions. The dynamical structures of ordered and chaotic orbits in each model have different distributions along the radial direction. When the radial term number
n increases, the gravity effects are enhanced. This leads to strengthening the degree of chaos. It is worth noting that the main structures of the spiral arms in models A, B and C are formed at radial distances between 3 and 5 scaled radii, as is shown in Refs. [
8,
10]. Some ranges of the scaled radial distances, such as the range of the scaled radial distances from 40 to 43, seem to be very far from the main structures of the spiral arms. These results show that chaos can occur at the radial distances close to the main structures of the spiral arms and those far from the main structures of the spiral arms. In addition, the chaotic orbits we find are not restricted to the regions near the unstable equilibrium points
and
. Thus, the energies selected in this paper are unlike those of [
8,
9,
10].
5. Conclusions
This paper mainly focuses on three classes of models of rotating galaxies in the polar coordinates in the rotating frame. They are models A, B and C, which have the same expressions but have different pattern speeds and different coefficients , , and . When the potentials with large deviations from axial symmetry are included in these models, the angular momentum is not a constant of motion. In this case, the kinetic energy is a function of the momenta and spatial coordinate.
The existing explicit force-gradient symplectic integrators [
21,
22,
23,
24] do not work for the present Hamiltonian problems. However, our extended force-gradient symplectic methods in the previous work [
32] are still available. Numerical tests show that the fourth-order symmetric symplectic method without the extended force-gradient operator performs poorer accuracy than that with the extended force-gradient operator. In particular, the optimized extended force-gradient symplectic method is superior to the corresponding non-optimized one in accuracy.
The fourth-order-optimized symplectic algorithm with the extended force-gradient operator is applied to survey the dynamical features of regular and chaotic orbits in these rotating galaxy models. It is shown through the techniques of Poincaré sections and fast Lyapunov indicators that an increase in the radial term number of the potential strengthens the gravity effects and the degree of chaos. The three types of models have similar dynamical structures for the same radial term number, energy and initial conditions.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}