1. Introduction
The approximate solution of a function
where
, is a complex valued function possessing the
nth order derivatives and roots with multiplicity
can be evaluated through iterative methods. These types of methods have attracted interest for some recent research [
1,
2], including symmetry-related works [
3,
4,
5,
6]. There are two types of iterative methods which can serve the purpose: one-point iterative methods and multi-point iterative methods. One-point iterative methods of order
use high order derivatives, namely
of function
For example, the methods presented by Chun et al. [
7], Hansen et al. [
8], Neta [
9], Osada [
10] and Sharma et al. [
11] are some one-point iterative methods. However, it is very difficult to find out the higher order derivatives when the function
g is complex. To reduce this ambiguity, multi-point iterative methods are used as they are free to use any number of evaluations of derivatives. In most of the multi-point iterative methods, the most reputable modified Newton–Raphson’s Method [
12] for multiple roots of a non linear function is used as the first step, sometimes as it is and sometimes by making some modifications to it. The scheme for modified Newton–Raphson’s Method is
This method has quadratic order of convergence for
. The multipoint iterative methods by Zhou et al. [
13], Geum et al. [
14,
15] and Behl et al. [
16] have used a modified Newton’s method as the first phase of their suggested schemes. Further, the methods by Li et al. [
17], Zhou et al. [
18], Behl et al. [
19], Kansal et al. [
20] and Rani et al. [
21] are some examples of multi-point iterative methods whose first step is based upon a modified Newton–Raphson’s method.
From the literature, one can observe that the primary goal behind the construction of the multi-point iterative method is to bring the order of convergence as high as possible without using the higher order derivatives. Different types of approaches [
22,
23,
24,
25,
26,
27,
28,
29] (for example, quadrature formula, adomian polynomial, divided difference approach, the weight function approach) have been applied by researchers to develop the multi-point iterative methods. Below, we provide some of the multi-point methods which are based on a weight function approach. In 2015, Artidiello et al. [
30] developed a two-point scheme using weight function as follows:
where
is weight function,
, and
and
are real parameters.
Very recently, in August 2022, Cordero et al. [
31] developed a new iterative scheme with the help of weight function, which is given below:
where
is weight function,
and
is a free parameter.
Further, Chanu et al. [
32] created a new scheme using the weight function and divided difference in September 2022, as follows:
where
is weight function, and
.
Motivated by this weight function approach, we are fully concentrated on developing a multi-point iterative method for multiple roots of order five which uses two function evaluations and two derivative evaluations per iteration. The first step of our new scheme is also a modified Newton–Raphson’s Method, and the second step involves a weight function. Mathematica [
33] is used in the whole work for symbolic and numerical computation.
The outline of the rest of the paper is as follows:
Section 2 of the paper includes the development of the new family and also an investigation of its convergence.
Section 3 discusses a few distinctive members of the newly formed family. The basins of attraction are contained in
Section 4 of the paper. The theoretical findings are validated in
Section 5 by a number of numerical instances. Finally,
Section 6 includes the closing remarks.
4. Basins of Attraction
The graphical images known as the basins of attraction of the roots of a polynomial
in the Complex plane are used to inspect the convergence of the scheme. The major significance of using the basins of attraction is that it widens the scope of inceptive guesses to obtain the zeros of an equation. These graphical images have been used by many researchers [
34,
35,
36,
37,
38,
39,
40,
41,
42] to measure the stability and effectiveness of the iterative formulae. We use
as tolerance, with a maximum of 25 iterations to exhibit the basins. The procedure is closed down with the comment that the iteration method starting from
is divergent, if the tolerance is not gained in the needed number of iterations. There are some basic rules that are used to draw the basins of attraction, given as below:
The first rule is to select a rectangular area and make sure that every root of the considered polynomial lies inside this region.
Each initial guess of a root is given a color in the basins of attraction. Similarly, another color is given to each initial guess of another root in the basins of attraction. For each of the complex polynomial’s roots, this operation is repeated.
If the iterative formula which started with the initial approximation converges to a root, then the basins of attraction display the color which is allotted to the initial guess of that root at point Otherwise, the initial guess is painted with black color.
We now proceed to compare our newly proposed methods,
TM1,
TM2,
TM3 and
TM4, with some existing schemes of the same nature. For comparison, we consider the three subcases of the scheme by Sharma et al. [
40] and three subcases of the family presented by Chanu et al. [
41]. The first method developed by Sharma et al. [
40], which we denoted by
SM1, is given as:
We designate the second subcase of the method by Sharma et al. [
40] as
SM2, which is given below:
Here, is a multi-valued function in both the subcases SM1 and SM2.
We write the third subcase of the method by Sharma et al. [
40] as
SM3, which is given below:
We denote the first subcase of the method by Chanu et al. [
41] as
NPM1. The scheme for
NPM1 is:
The second subcase of the method by Chanu et al. [
41] is expressed as
NPM2. This scheme is given by:
The third subcase of the method by Chanu et al. [
41] is denoted by
NPM3. The method is presented by:
where
is a multi-valued function in schemes
NPM1,
NPM2 and
NPM3.
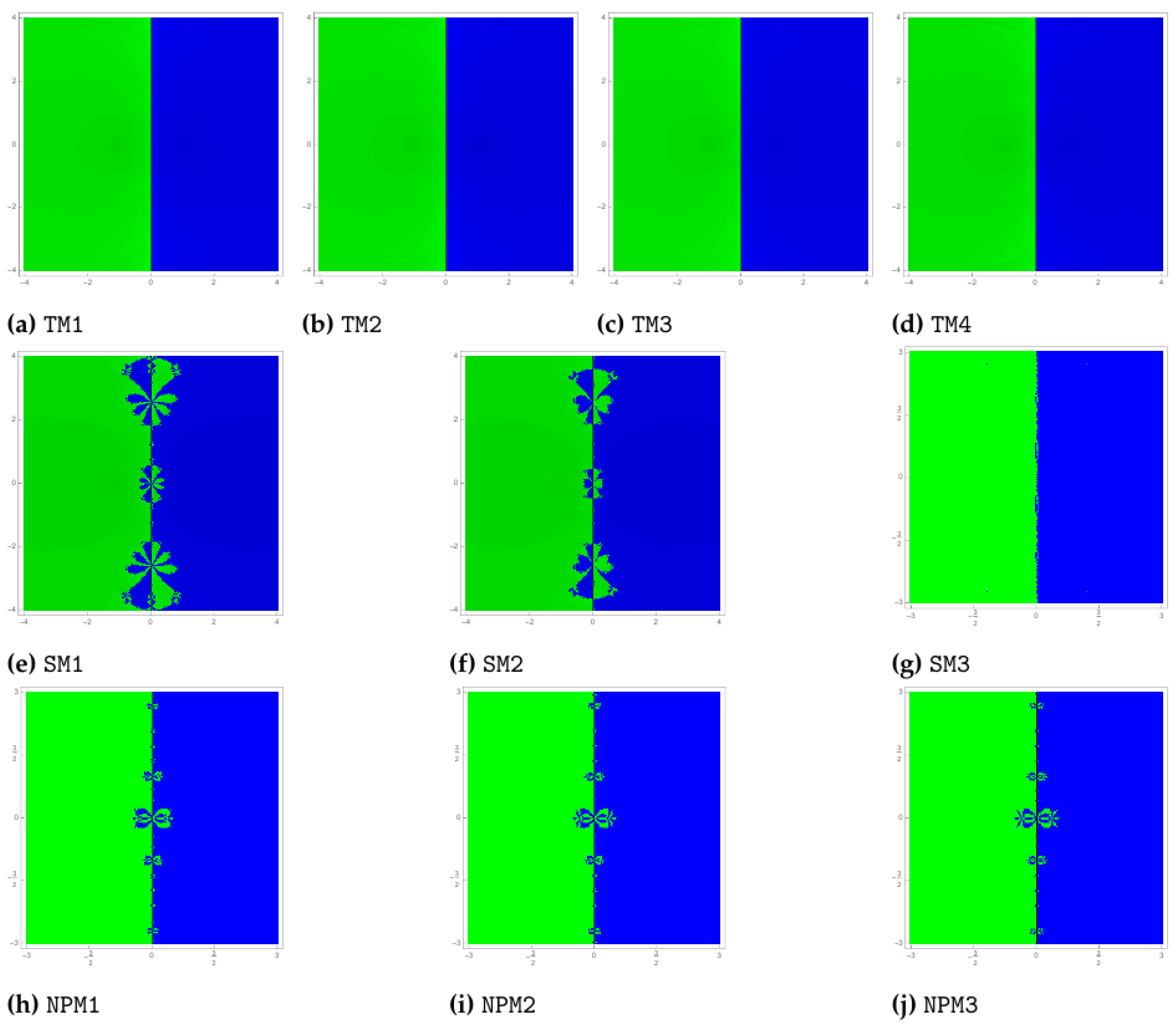
We compare our newly proposed methods TM1, TM2, TM3 and TM4 with SM1, SM2, SM3, NPM1, NPM2 and NPM3 by using the following four problems through basins of attraction. To view dynamical vision, we assume a rectangle with grid points.
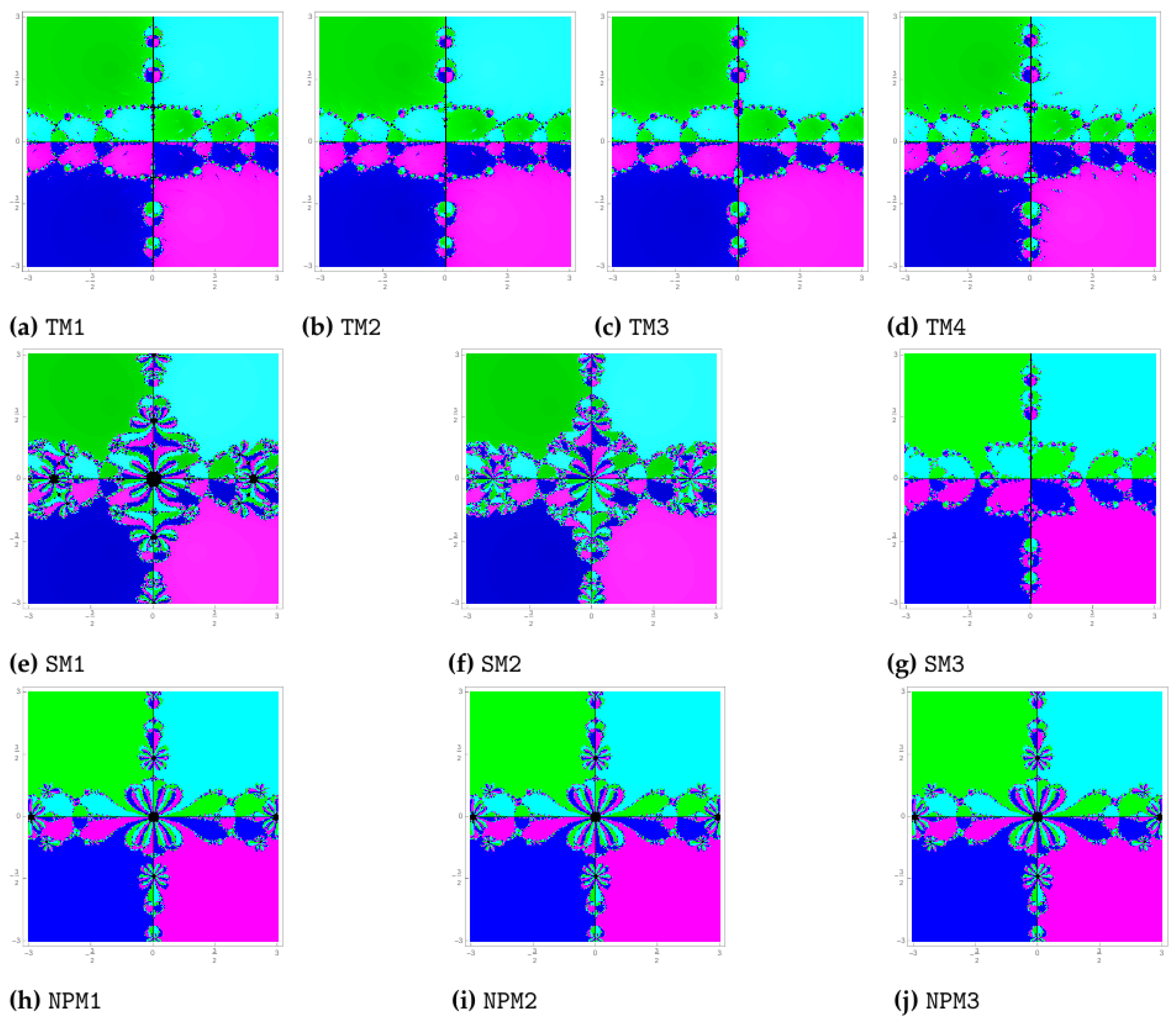
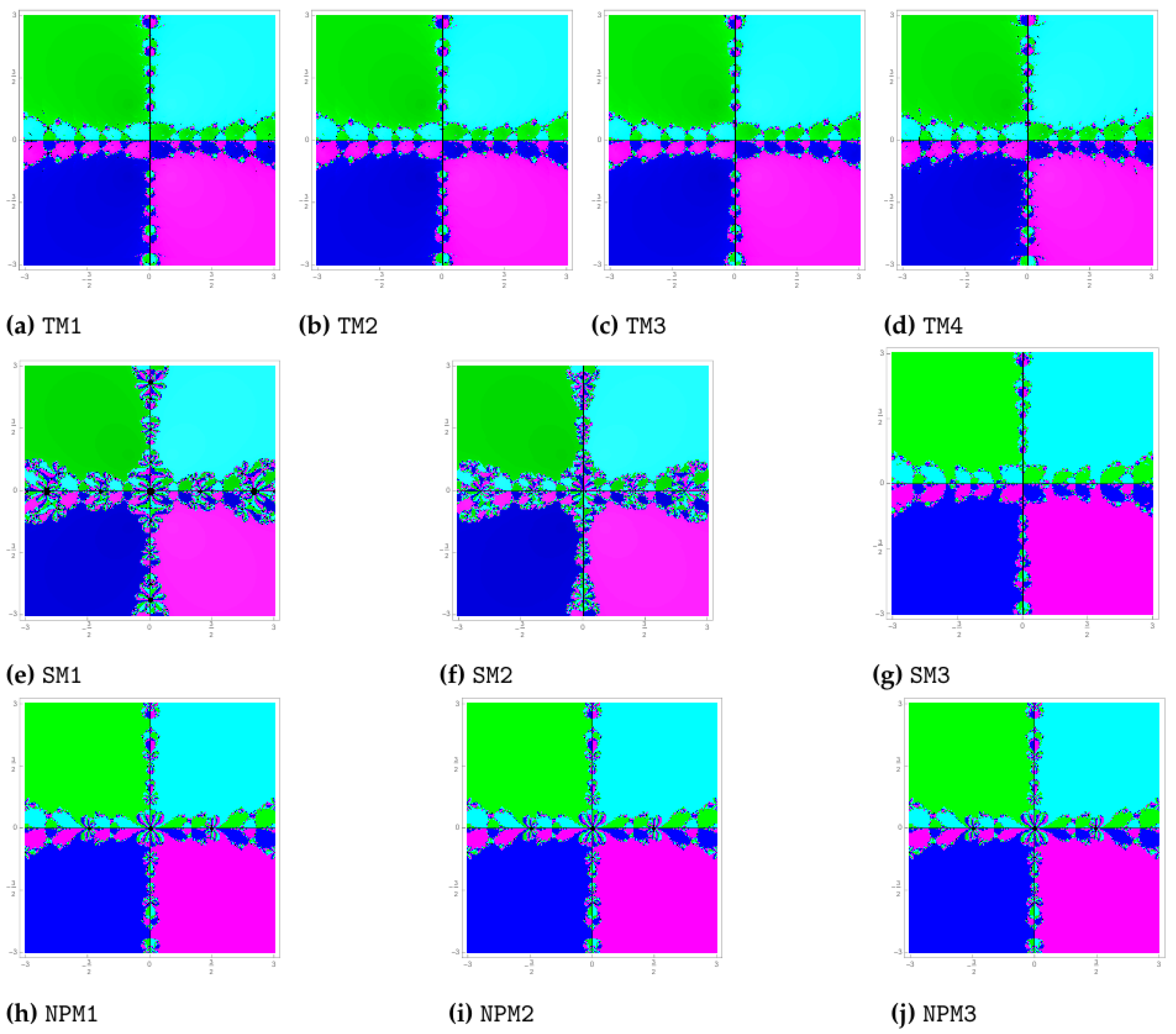
Problem 1. Let us assume the polynomial , having zeros with multiplicity 3. Distribute the colours blue and green among each starting point in the basins of attraction of roots and respectively. Figure 1 shows the basins that were obtained for the methods TM1, TM2, TM3, TM4, SM1, SM2, SM3, NPM1, NPM2 and NPM3. From Figure 1, one can easily observe that the methods TM1, TM2, TM3 and TM4 divide the complex plane into two equal halves without any disturbance in the regions, but in case of the methods SM1, SM2, SM3, NPM1, NPM2 and NPM3, the complex plane is divided into two equal halves, which have disturbances. Therefore, the basins of attraction for the proposed methods, TM1, TM2, TM3 and TM4, are more stable than those for SM1, SM2, SM3, NPM1, NPM2 and NPM3. Among the newly proposed methods, all performed equally well. Problem 2. Now, consider the polynomial , having zeros with multiplicity We have assigned the colors blue, green, magenta and cyan for each initial point in the basins of attraction of zeros respectively. Figure 2 displays the basins created using the techniques TM1, TM2, TM3, TM4, SM1, SM2, SM3, NPM1, NPM2 and NPM3. Black spots in Figure 2 show the points which are not convergent to any of the roots. It is clear from Figure 2 that the convergence area is more for methods TM1, TM2, TM3, TM4 and SM3 as compared to the methods SM1, SM2, NPM1, NPM2 and NPM3. Furthermore, it can be seen that the new proposed methods, SM2 and SM3, do not contain any black spots which indicate the divergent points. Problem 3. Consider the polynomial The roots of this polynomial are , , and with multiplicity Assign the colours green, blue, cyan, and magenta to each initial point on the roots and It is observed from Figure 3 that the proposed methods TM1, TM2, TM3 and TM4, as well as the method SM3, are adequate to converge to all the roots, and the divergent points occur in case of the methods SM1, SM2, NPM1, NPM2 and NPM3.
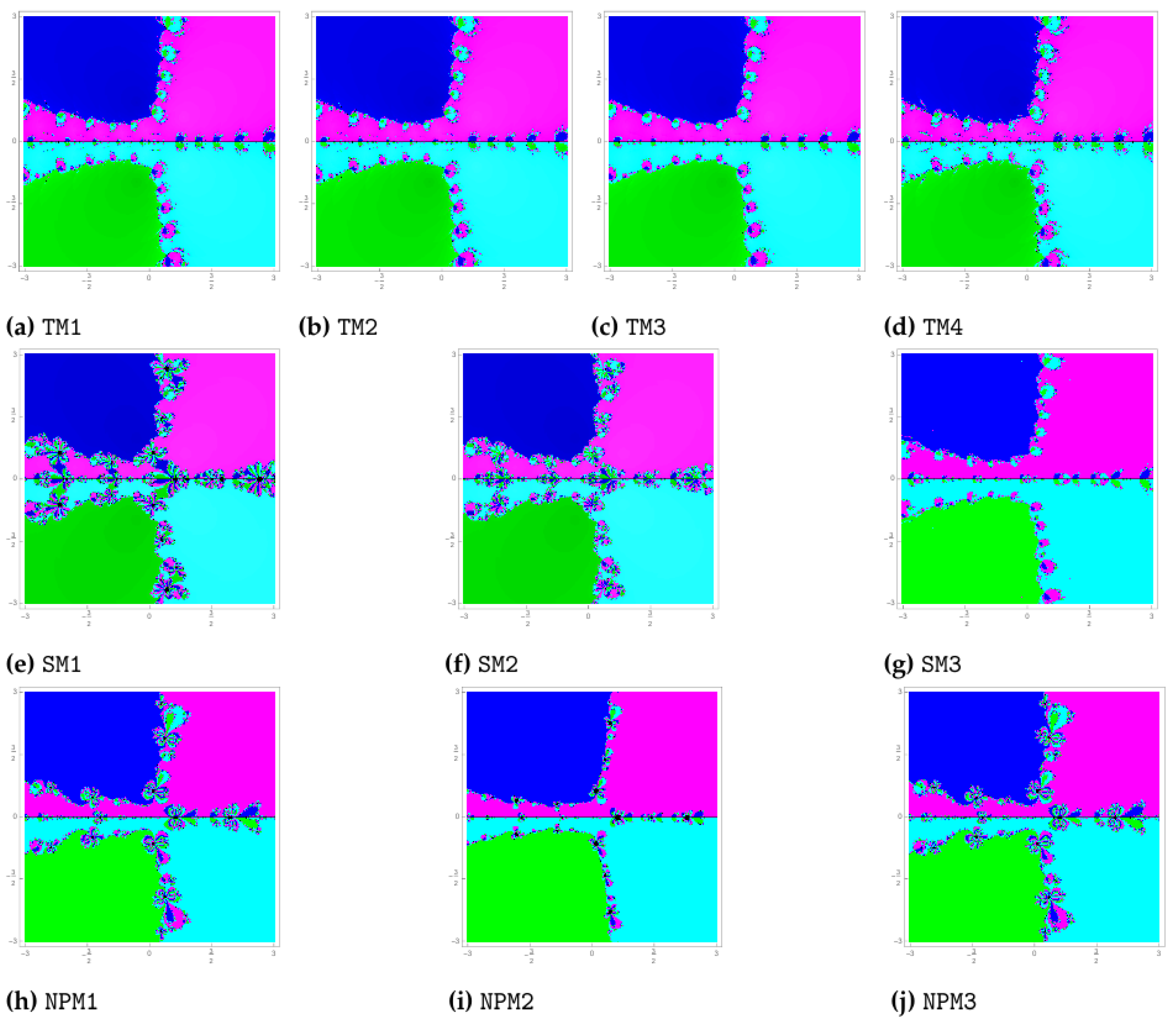
Problem 4. The fourth polynomial we consider is For this polynomial, , , and are the roots of the polynomial with multiplicity We assign the colors to each initial guess of zero , , and as green, blue, cyan and magenta, respectively. It is observed from Figure 4 that the methods TM1, TM2, TM3, TM4 and SM3 do not contain any black spots, but the methods SM1, SM2, NPM1, NPM2 and NPM3 do contain them, which means that the methods TM1, TM2, TM3, TM4 and SM3 have performed better than the methods SM1, SM2, NPM1, NPM2 and NPM3. As is visible in all figures, the basins of attraction possess reflection symmetry, and one can even go further to provide a proof for their symmetry [
42], while in other instances [
3] the behavior was identified as near to symmetric.
5. Numerical Results
The convergence of the newly generated methods is ensured in this section, numerically. Some nonlinear problems are solved by the newly generated methods. Other existing schemes mentioned in the previous section are also considered for comparison.
Mathematica programming software [
33] is used to bring off the computational work. The numerical results are summarized in tabular form. The table embraces the number of iterations necessary to procure the root with finishing benchmark
and estimated error
in the last three iterations, residual error of the considered function
and computational order of convergence (
COC), by exerting the formula:
The CPU running time is also presented in numerical results. For all the numerical computations, we have used Mathematica 12.0 programming software on Windows 10 on Intel Core i3. The problems considered for comparison are mentioned in
Table 2. For our methods, in all the problems we have taken
The computational results in
Table 3 and
Table 4 show that the methods
NPM1,
NPM2 and
NPM3 have the best residuals, but the major drawback of these methods is that they do not retain their order of convergence. Therefore, our proposed methods have performed better and possess lower residual error as well as low CPU-time for functions
and
. They also preserve their fifth order of convergence. The numerical data for the function
shown in
Table 5 demonstrate that
TM4 performs better than the existing methods, with low error and precise result estimations. Further, the elapsed CPU time is minimal in the case of
TM3. The numerical results obtained for function
are shown in
Table 6. One can observe that each scheme has extremely high precision, with the lowest residual calculated by
TM4.
Table 7 shows the numerical results of the methods for function
. The best performer for this function is
TM4. Furthermore, it is worth mentioning here that the methods NPM1–NPM3 do not converge to the required root for the problems
and
, or we can say that they are divergent for these problems.
6. Concluding Remarks
We have introduced a new multi-point iterative algorithm that can solve nonlinear equations having multiple zeros. The scheme is based on the weight function approach. Per iteration, the presented scheme requires two assessments of functions and two assessments of its derivatives to achieve the fifth order convergence. Some special cases of the new family are also presented. The presented basins of attraction have confirmed that the performance of the new methods is on par with or better than the established schemes in the literature. The theoretical results proved in the paper regarding the order of convergence are verified through various numerical examples. A comparison with the existing methods is also made. The results obtained have once again proved the robustness of the new schemes. Moreover, the CPU time is also evaluated, which is lesser for the newly proposed schemes. In a nutshell, we can say that the new methods have performed better than the existing methods in terms of basins of attraction, the number of iterations required to converge to the root, residual errors and CPU-time for the considered problems.








{kind=link}
{kind=link}
{kind=link}
{kind=link}