
Event-Triggered Sliding Mode Impulsive Control for Lower Limb Rehabilitation Exoskeleton Robot Gait Tracking

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Models and Method
2.1. Notation
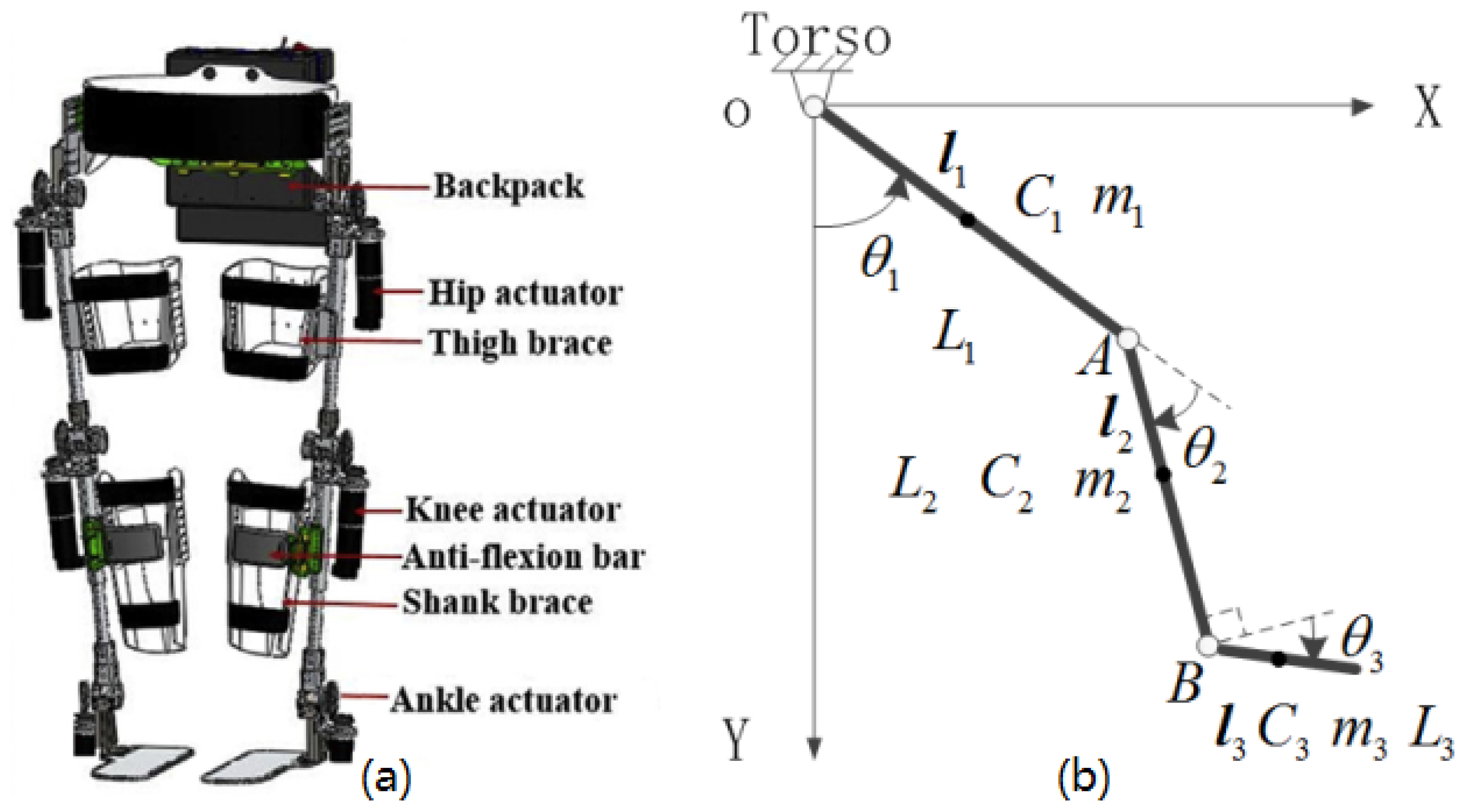
2.2. Dynamic Model of CUHK-EXO LLRER
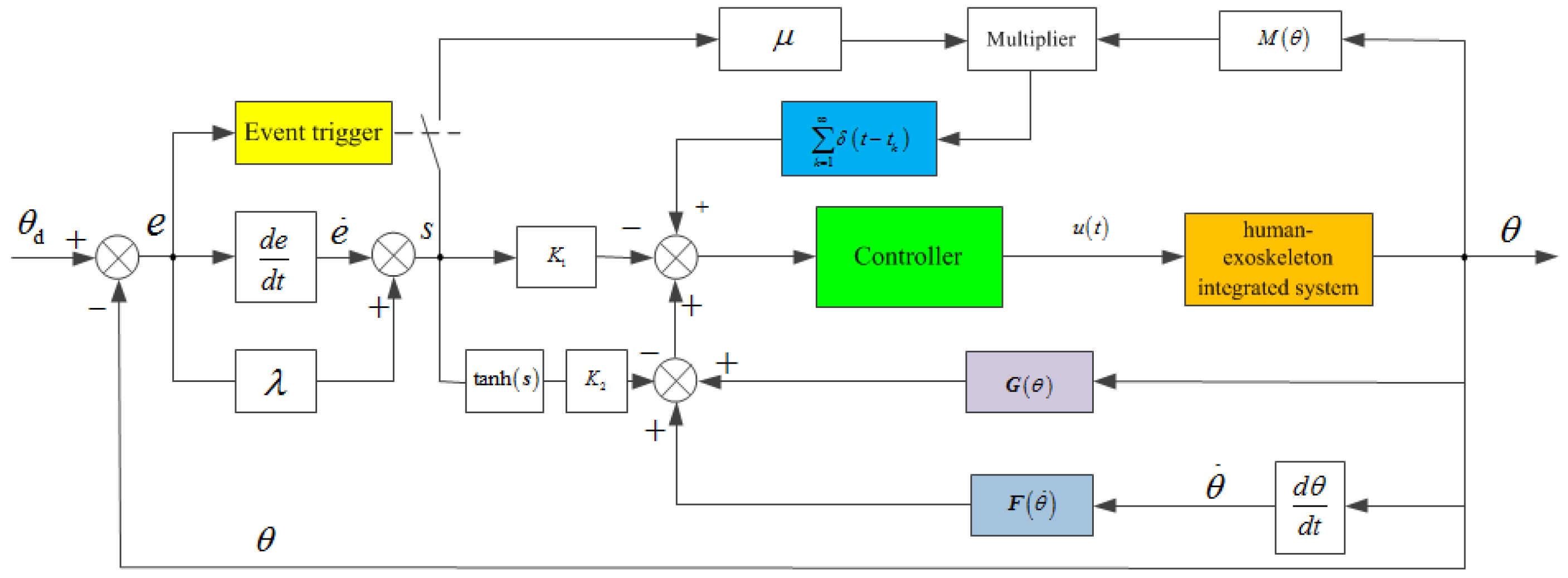
2.3. Event-Triggered Sliding Mode Impulsive Control
2.4. Definitions and Assumptions
3. Main Results
3.1. Lyapunov Stability Analysis
- Step 1: Firstly, we should prove that, for given and any initial values of system (1), there exists a constant , if satisfies, then it holds as follows:To do this, a quadratic Lyapunov function is constructed. If , due to (16), then .On the one hand, when , , for above , taking the Dini derivatives along the solutions of the first equation of (10), we getBy Property 1, i.e., (2), . For , thusBy Property 2, i.e., (3), we have , . According to Assumption 2, (14), and (4), we have , , and . Accordingly, it can be derived asSince , hence, from this one can get thatBecause is left continuous at , so . We integrate both sides of the above inequality (21) from to t, and get thatfrom which one can obtainOn the other hand, at the impulsive instant, when , is expressed as . We substitute the second equation of the impulsive system (10) into the above equality to getBy the constraint , we have . It implies that the Lyapunov function decreases gradually.
- Step 2: Next, we will prove that, for , , the inequality holds as follows:(c). Assume that when , , the inequality (25) holds as follows:
- Step 3: Finally, we will prove that, there exists such that for . If , then holds, Owing to , so . We multiply both sides of the above inequality by to getAccording to the constraint , we have , and it is negative definite function when . Therefore, the Lyapunov function is gradually decreased until . According to definition 1, there always exist , for , holds. It means that the practical tracking synchronization is within a desired tracking error bound and the tracking errors remain within the desired finite ball . The proof of Theorem 1 is completed.
3.2. Exclusion of Zeno Behavior
- Case (a): Triggering time sequence entirely consists of the forced triggering instants . In this case, it follows the assumption , which means with certainty that the Zeno behavior is excluded.
- Case (b): Triggering time sequence fully consists of the required event-triggered instants . In this case, according to (12) and (23), it holds thatDue to , hence, . For , , thus yielding . It can be deduced that . Repeating this procedure for , , we obtain . If the constraints satisfy , , , then as . This implies that the Zeno behavior is excluded.
- Case (c): Triggering time sequence consists of both event-triggered instants and forced triggering instants. In this case, we assume instant Q is the Zeno instant, so . Let , where and , so the interval consists of infinitely many impulsive instants. If there exists a forced triggering instant in , then we claim that there must be only one forced triggering instant called . Otherwise, it will contradict the definition of P. Obviously, all are required event-triggered instants. From case (b), it holds as , which contradicts the definition of instant Q. Inversely, if there is no forced triggering instant in , then the Zeno behavior can also be excluded [33,54].
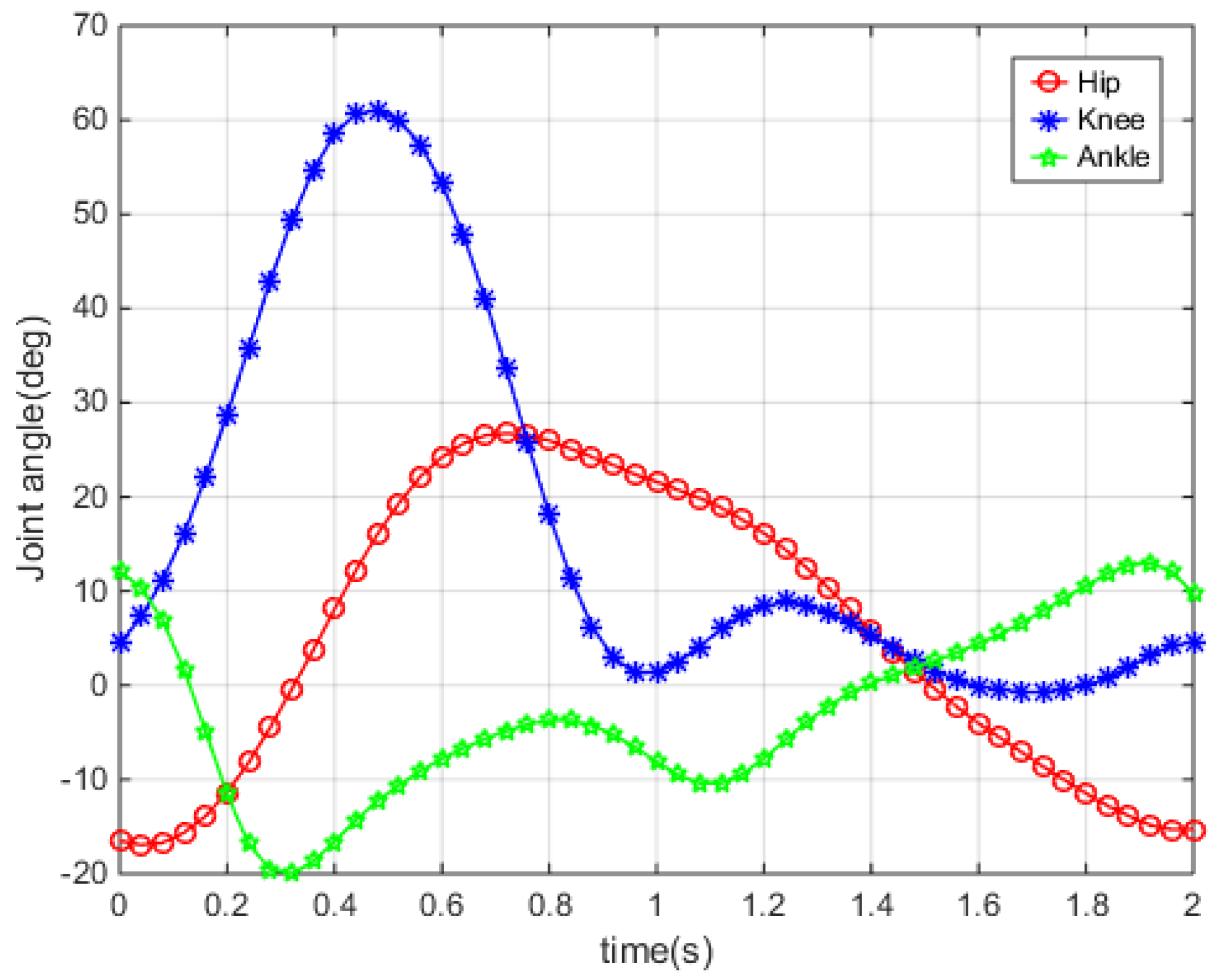
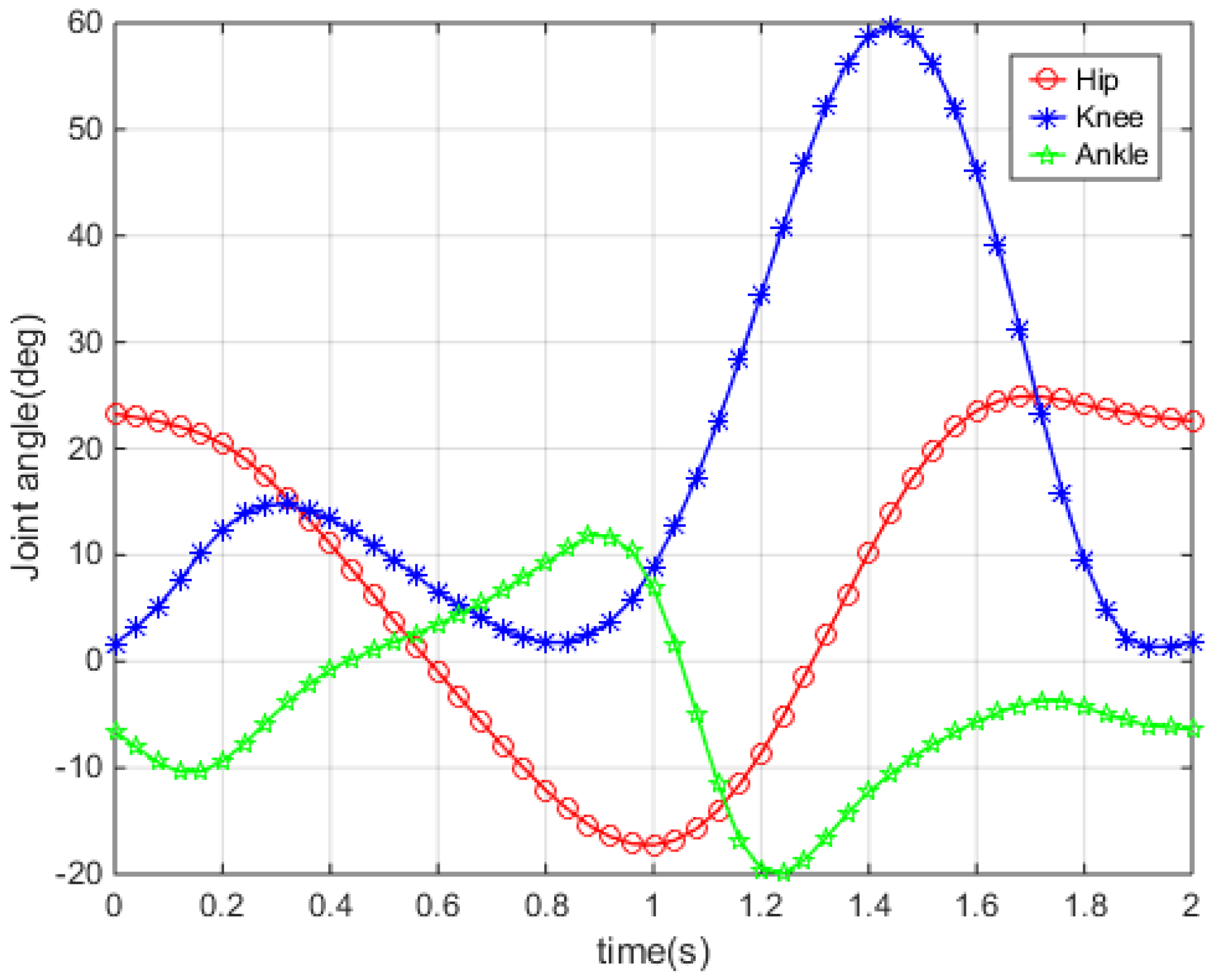
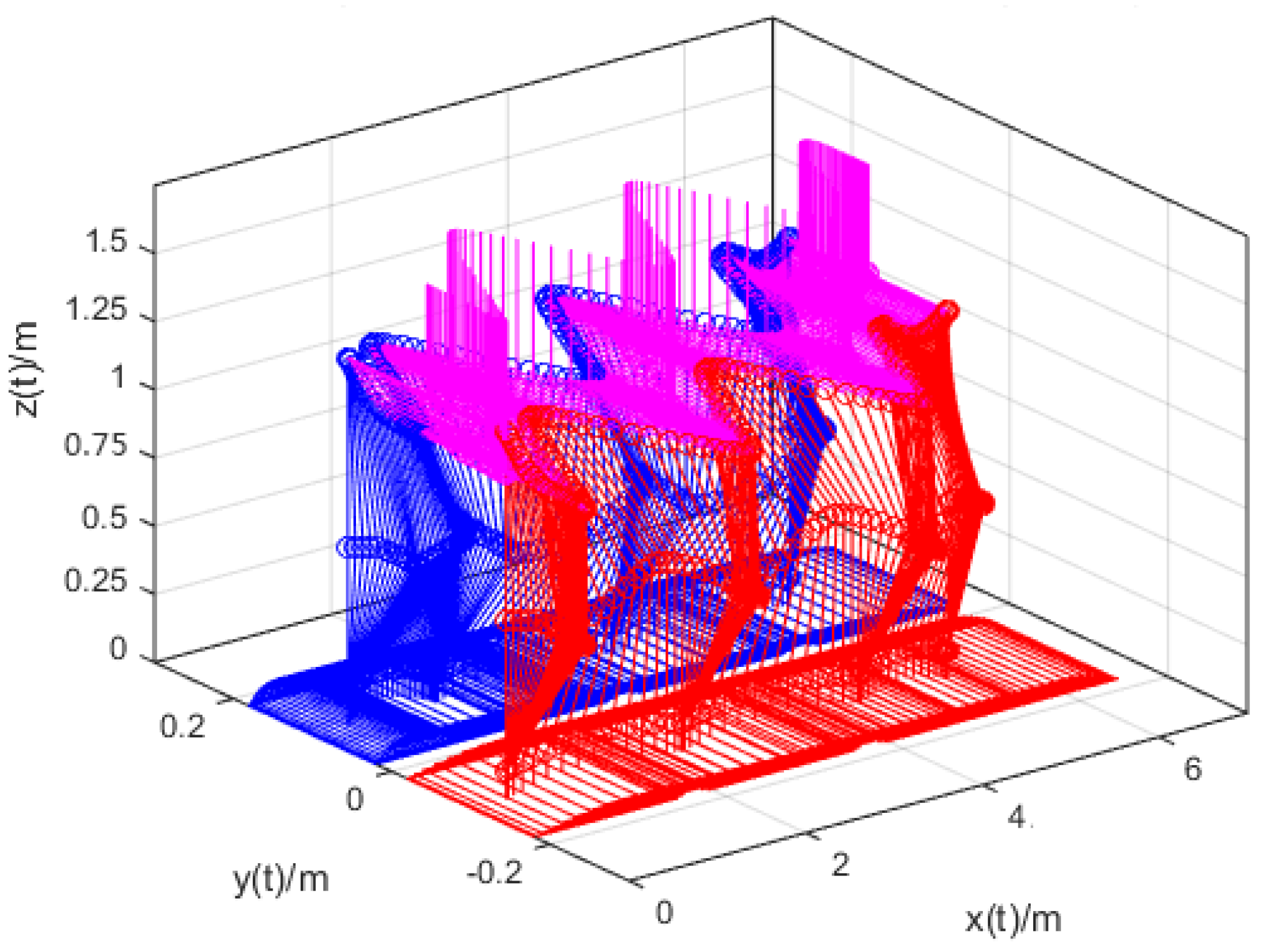
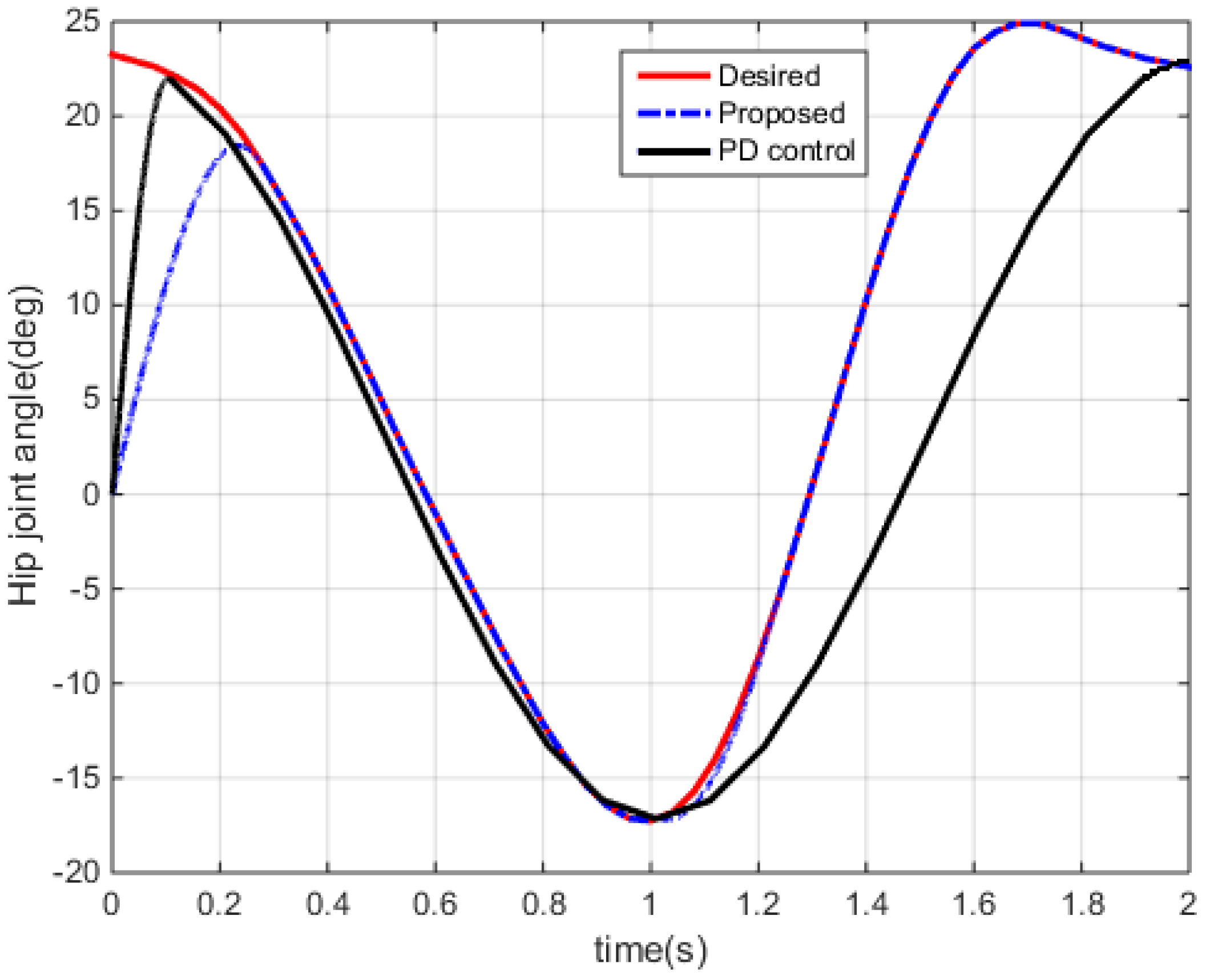
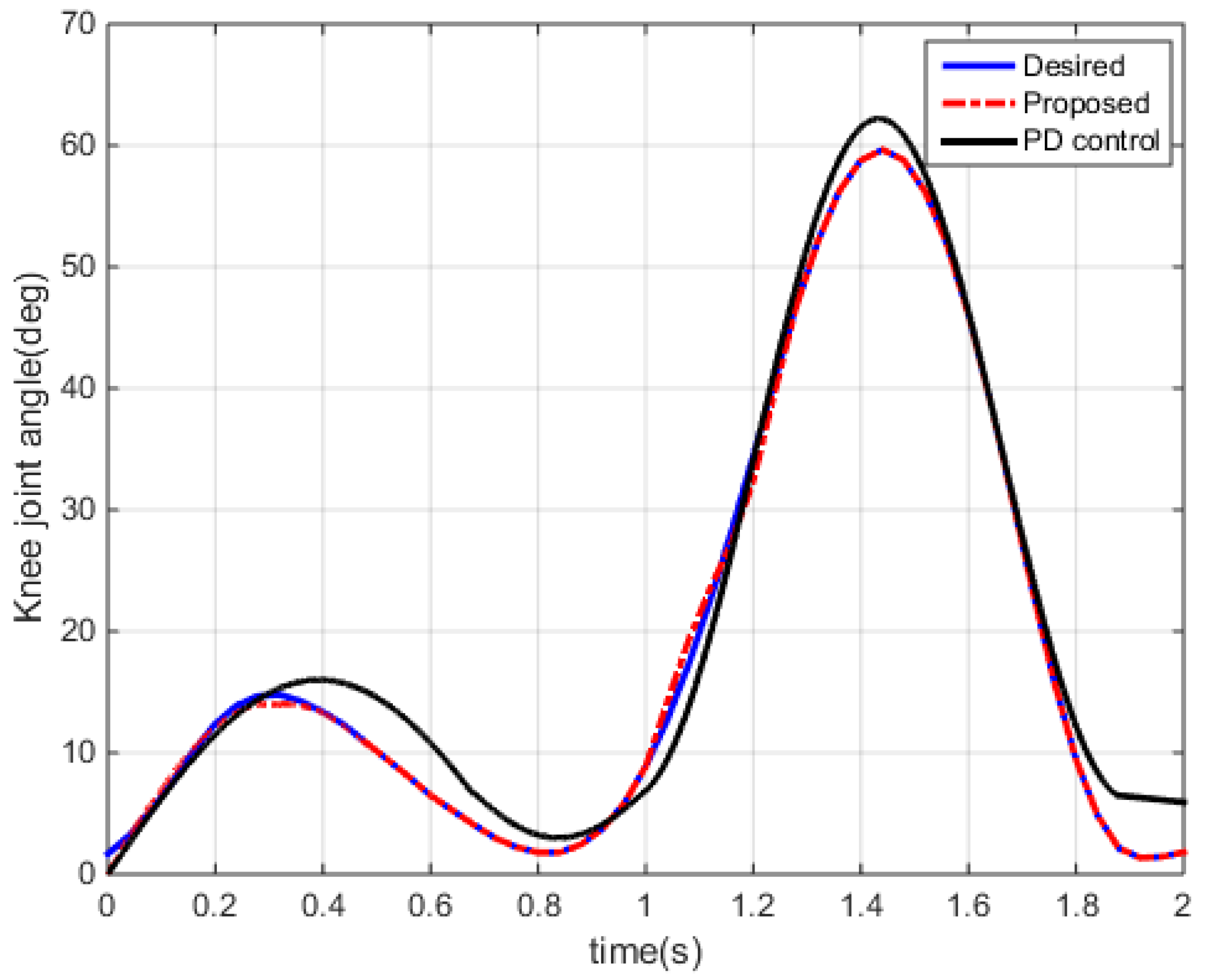
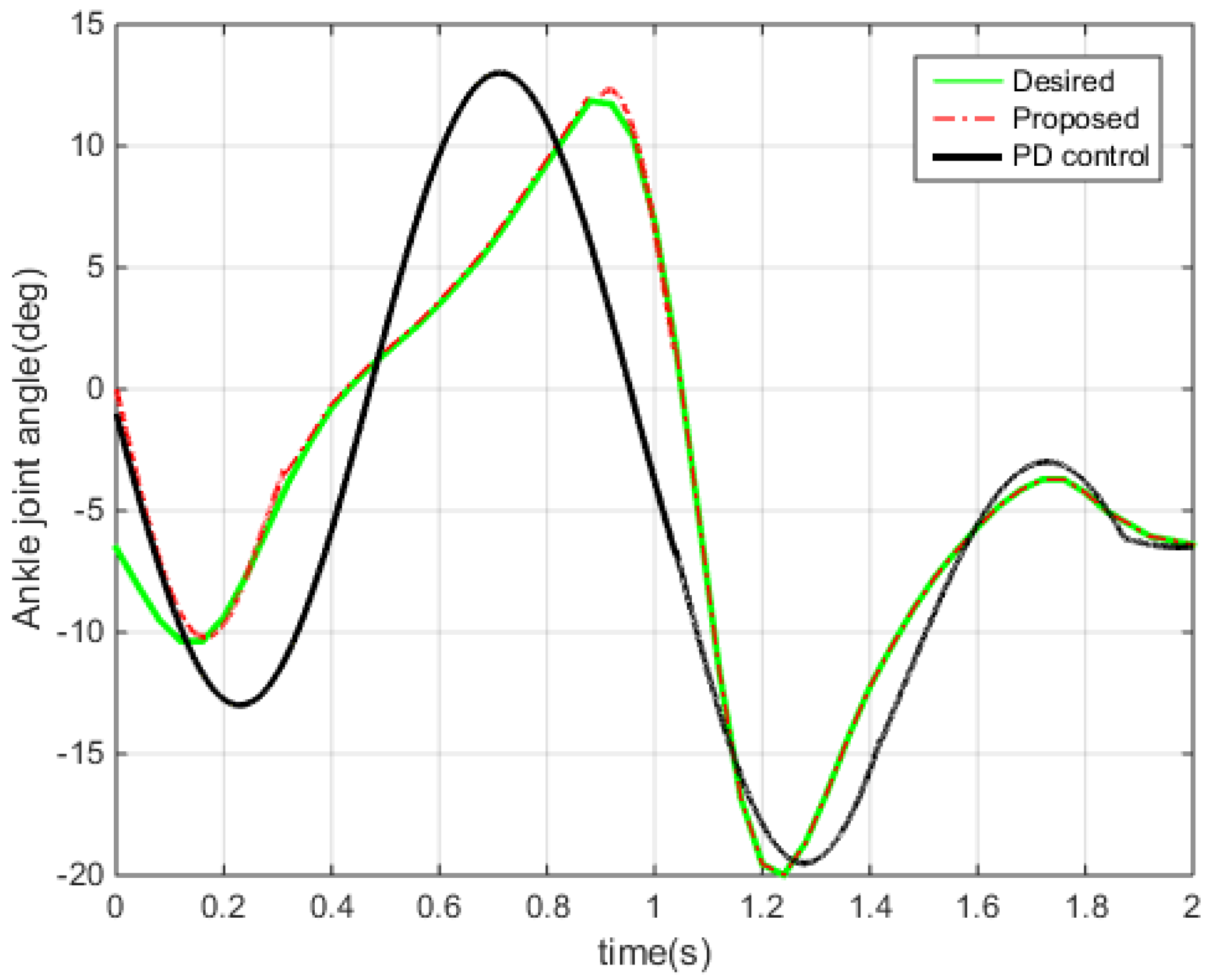
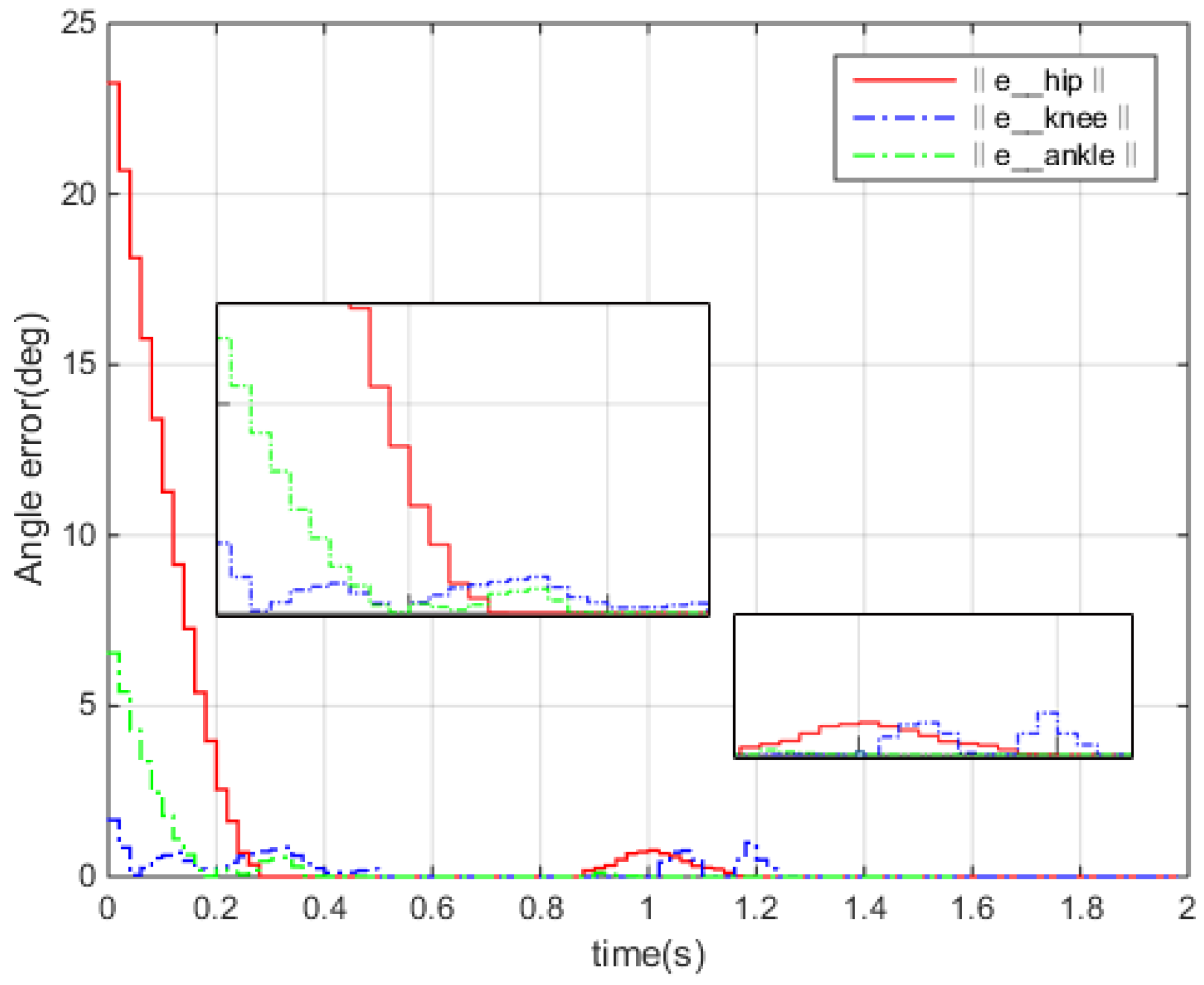
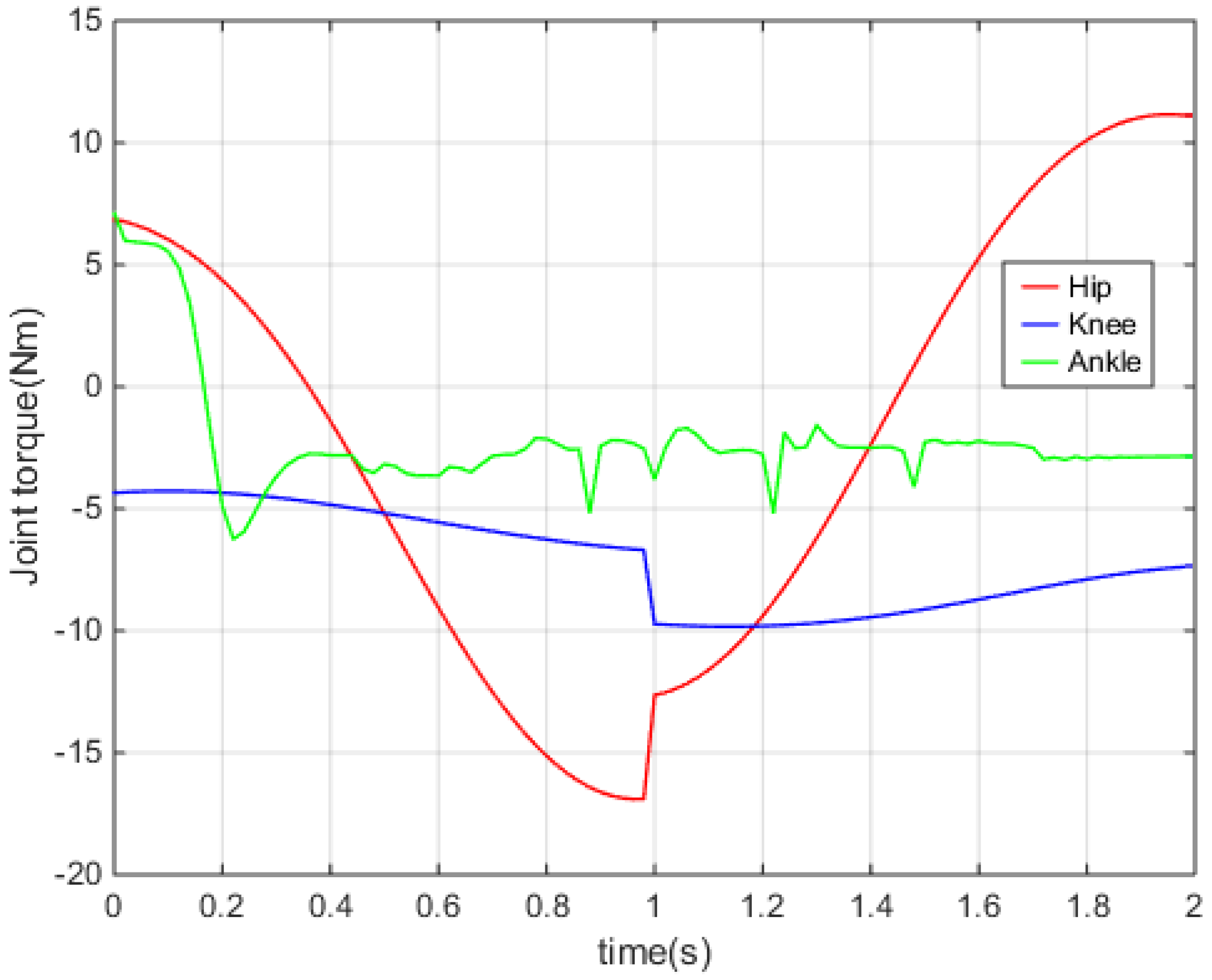
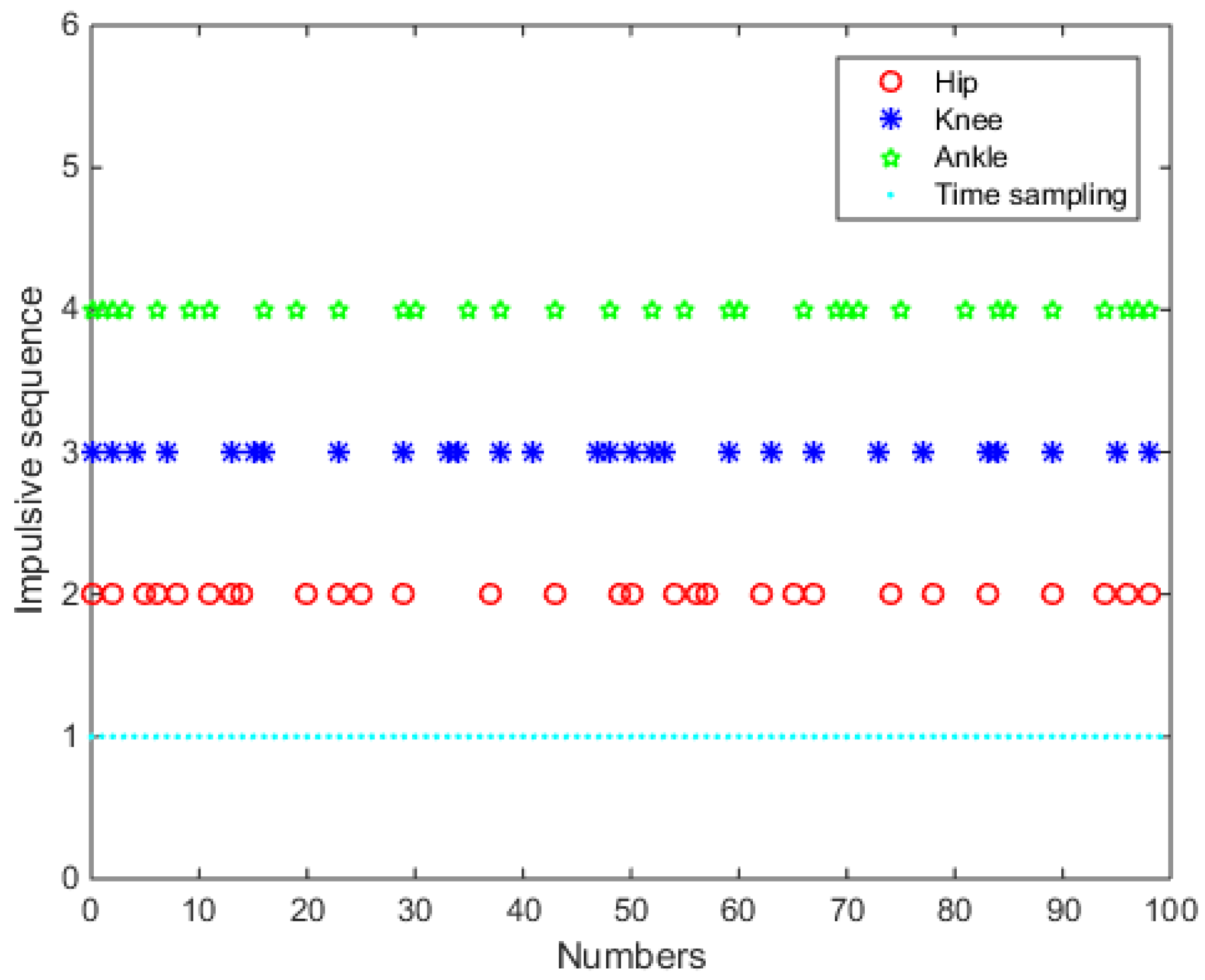
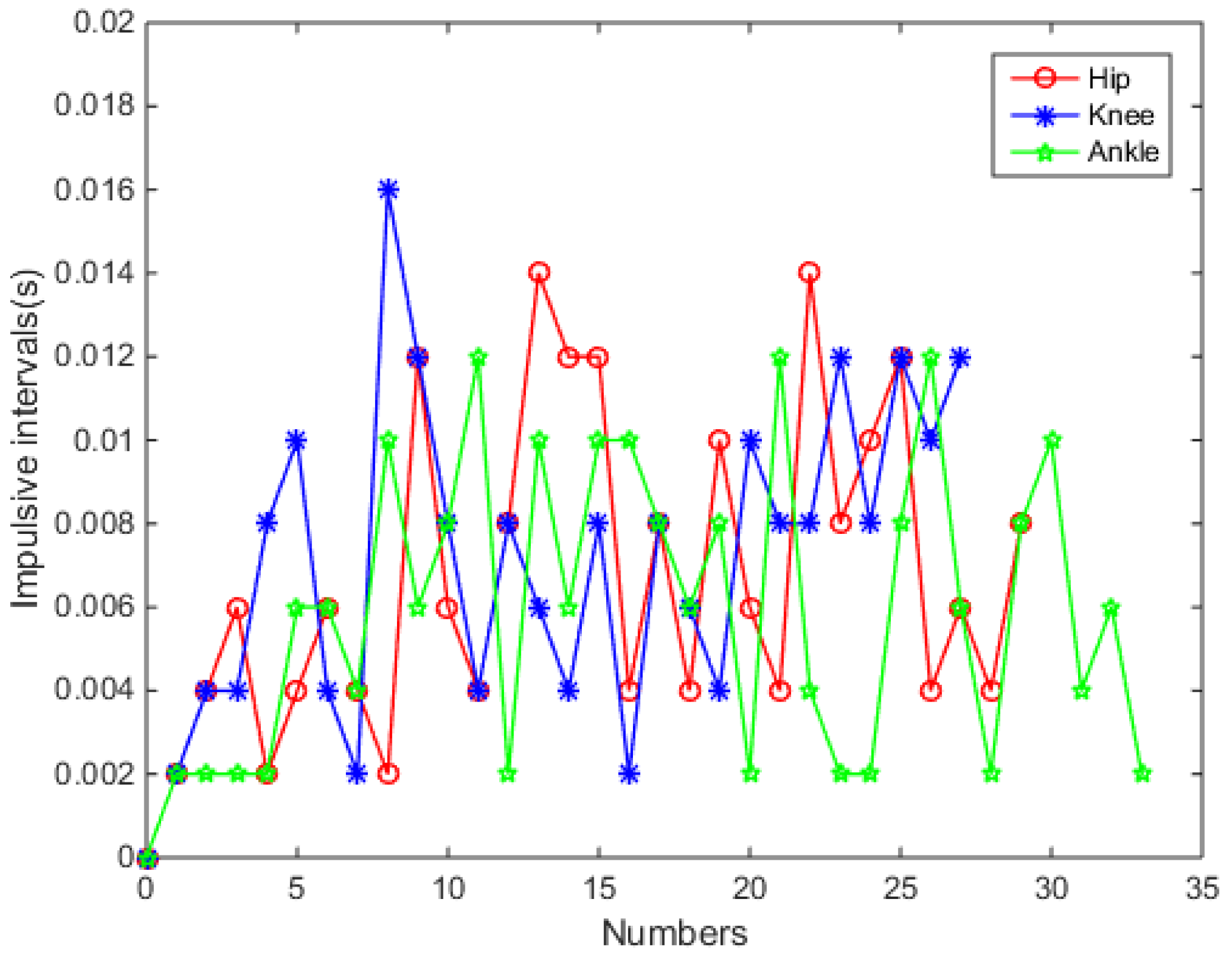
4. Numerical Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| LLRERs | lower limb rehabilitation exoskeleton robots |
| CUHK-EXO | The Chinese University of Hong Kong Exoskeleton |
| SMC | sliding mode control |
| SAC | sensitivity amplify control |
| ILC | iterative learning control |
| sEMG | surface electromyogram |
| EEG | electroencephalogram |
| EOG | electro-oculogram |
| ETIC | event-triggered impulsive control |
| IETM | impulsive event-triggered mechanism |
| IMU | inertial measurement unit |
| CASIA | The Institute of Automation, Chinese Academy of Sciences |
References
- Shi, D.; Zhang, W.; Ding, X. A Review on Lower Limb Rehabilitation Exoskeleton Robots. Chin. J. Mech. Eng. 2019, 32, 74. [Google Scholar] [CrossRef] [Green Version]
- Viteckova, S.; Kutilek, P.; Jirina, M. Wearable lower limb robotics: A review. Biocybern. Biomed. Eng. 2013, 33, 96–105. [Google Scholar] [CrossRef]
- Wang, T.; Zhang, B.; Liu, C.T.; Liu, T.; Han, Y.; Wang, S.Y.; Ferreira, J.P.; Dong, W.; Zhan, X.F. A Review on the Rehabilitation Exoskeletons for the Lower Limbs of the Elderly and the Disabled. Electronics 2022, 11, 388. [Google Scholar] [CrossRef]
- Zhou, J.; Yang, S.; Xue, Q. Lower limb rehabilitation exoskeleton robot: A review. Adv. Mech. Eng. 2021, 13, 1–17. [Google Scholar] [CrossRef]
- Kazerooni, H.; Racine, J.L.; Huang, L.; Steger, R. On the control of the berkeley lower extremity exoskeleton (BLEEX). In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Barcelona, Spain, 18–22 April 2005. [Google Scholar]
- Chen, B.; Zhong, C.H.; Zhao, X.; Ma, H.; Qin, L.; Liao, W.H. Reference joint trajectories generation of CUHK-EXO exoskeleton for system balance in walking assistance. IEEE Access 2019, 7, 33809–33821. [Google Scholar] [CrossRef]
- Kalita, B.; Narayan, J.; Dwivedy, S.K. Development of active lower limb robotic-based orthosis and exoskeleton devices: A systematic review. Int. J. Soc. Robot 2021, 13, 775–793. [Google Scholar] [CrossRef]
- Aliman, N.; Ramli, R.; Haris, S.M. Design and development of lower limb exoskeletons: A survey. Robot. Auton. Syst. 2017, 95, 102–116. [Google Scholar] [CrossRef]
- Zhang, C.; Liu, G.F.; Li, C.L.; Zhao, J.; Yu, H.Y.; Zhu, Y.H. Development of a lower limb rehabilitation exoskeleton based on real-time gait detection and gait tracking. Adv. Mech. Eng. 2016, 8. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Peng, S.G.; Ma, H.Z.; Liao, W.H. Dynamic Parameter Identification and Gait Tracking of Lower Limb Exoskeleton Robot. J. Guangdong Univ. Technol. 2022, 39, 44–52. [Google Scholar]
- Liu, Y.; Peng, S.G.; Du, Y.X.; Liao, W.H. Kinematics Modeling and Gait Trajectory Tracking for Lower Limb Exoskeleton Robot based on PD Control with Gravity compensation. In Proceedings of the 38th Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019. [Google Scholar]
- Baud, R.; Manzoori, A.R.; Ijspeert, A.; Bouri, M. Review of control strategies for lower-limb exoskeletons to assist gait. J. Neuroeng. Rehabil. 2021, 18, 1–34. [Google Scholar] [CrossRef]
- Yang, M.; Wang, X.; Zhu, Z.; Xi, R.; Wu, Q. Development and control of a robotic lower limb exoskeleton for paraplegic patients. Proc. Inst. Mech. Eng. Part J. Mech. Eng. Sci. 2019, 233, 1087–1098. [Google Scholar] [CrossRef]
- Liu, J.H.; Wang, J.; Zhang, G.W. Event-triggered sliding mode controller design for lower limb exoskeleton. In Proceedings of the 39th Chinese Control Conferemce (CCC), Shengyang, China, 27–29 July 2020. [Google Scholar]
- Chen, B.; Zi, B.; Wang, Z.; Qin, L.; Liao, W.H. Knee exoskeletons for gait rehabilitation and human performance augmentation: A state-of-the-art. Mech. Mach. Theory 2019, 134, 499–511. [Google Scholar] [CrossRef]
- Lu, X.L.; Du, F.P.; Wang, X.S.; Jia, S.; Xu, F.Y. Development and Fuzzy Sliding Mode Compensation Control of a Power Assist Lower Extremity Exoskeleton. Mechanika 2018, 24, 92–99. [Google Scholar] [CrossRef]
- Chen, C.; Xie, L.H.; Xie, K.; Lewis, F.L.; Xie, S.L. Adaptive optimal output tracking of continuous-time systems via output-feedback-based reinforcement learning. Automatica 2022, 146, 110581. [Google Scholar] [CrossRef]
- Kang, I.; Kunapuli, P.; Young, A.J. Real-time neural network-based gait phase estimation using a robotic hip exoskeleton. IEEE Trans. Med. Robot. Bionics 2019, 2, 28–37. [Google Scholar] [CrossRef]
- Peng, Z.N.; Luo, R.; Huang, R.; Hu, J.P.; Shi, K.C.; Cheng, H.; Ghosh, B.K. Data-driven reinforcement learning for walking assistance control of a lower limb exoskeleton with hemiplegic patients. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020. [Google Scholar]
- Chen, Z.L.; Guo, Q.; Li, T.S.; Yan, Y.; Jiang, D. Gait Prediction and Variable Admittance Control for Lower Limb Exoskeleton with Measurement Delay and Extended-State-Observer. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–14. [Google Scholar] [CrossRef]
- Liang, C.W.; Hsiao, T. Admittance Control of Powered Exoskeletons Based on Joint Torque Estimation. IEEE Access 2022, 8, 94404–94414. [Google Scholar] [CrossRef]
- Li, Z.J.; Huang, B.; Ye, Z.F.; Deng, M.D.; Yang, C.G. Physical Human-Robot Interaction of a Robotic Exoskeleton By Admittance Control. IEEE Trans. Ind. Electron. 2018, 65, 9614–9624. [Google Scholar] [CrossRef] [Green Version]
- Narayan, J.; Abbas, M.; Dwivedy, S.K. Adaptive iterative learning-based gait tracking control for paediatric exoskeleton during passive-assist rehabilitation. Int. J. Intell. Eng. Inf. 2021, 9, 507–532. [Google Scholar] [CrossRef]
- Ren, B.; Luo, X.; Chen, J.Y. Single leg gait tracking of lower limb exoskeleton based on adaptive iterative learning control. Appl. Sci. 2019, 9, 2251. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y.H.; Wu, Q.C.; Chen, B.; Zhao, Z.Y. Design and Voluntary Control of Variable Stiffness Exoskeleton Based on sEMG Driven Model. IEEE Robot. Autom. Lett. 2022, 7, 5787–5794. [Google Scholar] [CrossRef]
- Tang, Z.C.; Yu, H.N.; Yang, H.C.; Zhang, L.K.; Zhang, L.F. Effect of velocity and acceleration in joint angle estimation for an EMG-Based upper-limb exoskeleton control. Comput. Biol. Med. 2021, 141, 105156. [Google Scholar] [CrossRef] [PubMed]
- Llorente-Vidrio, D.; Pérez-San Lázaro, R.; Ballesteros, M.; Salgado, I.; Cruz-Ortiz, D.; Chairez, I. Event driven sliding mode control of a lower limb exoskeleton based on a continuous neural network electromyographic signal classifier. Mechatronics 2020, 72, 102451. [Google Scholar] [CrossRef]
- Young, A.J.; Gannon, H.; Ferris, D.P. A biomechanical comparison of proportional electromyography control to biological torque control using a powered hip exoskeleton. Front. Bioeng. Biotech. 2017, 5, 00037. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- He, Y.; Eguren, D.; Azorinn, J.M.; Grossman, R.G.; Luu, T.P.; Contreras-Vidalin, J.L. Brain—Machine interfaces for controlling lower-limb powered robotic systems. J. Neural. Eng. 2018, 15, 021004. [Google Scholar] [CrossRef]
- Wang, J.; Liu, J.H.; Zhang, G.W.; Guo, S.J. Periodic event-triggered sliding mode control for lower limb exoskeleton based on human-robot cooperation. ISA Trans. 2022, 123, 87–97. [Google Scholar] [CrossRef]
- Yang, T. Impulsive Control Theory; Springer: Berlin, Germany, 2001. [Google Scholar]
- Li, X.D.; Li, P. Input-to-state stability of nonlinear systems: Event-triggered impulsive control. IEEE Trans. Autom. Control 2021, 67, 1460–1465. [Google Scholar] [CrossRef]
- Li, X.; Peng, D.X.; Cao, J.D. Lyapunov stability for impulsive systems via event-triggered impulsive control. IEEE Trans. Autom. Control. 2020, 65, 4908–4913. [Google Scholar] [CrossRef]
- Liu, X.M.; Zhang, H.Y.; Wu, T.; Shu, J.L. Stochastic exponential stabilization for Markov jump neural networks with time-varying delays via adaptive event-triggered impulsive control. Complexity 2020, 2020, 3956549. [Google Scholar] [CrossRef]
- Peng, Z.N.; Cheng, H.; Huang, R.; Hu, J.P.; Luo, R.; Shi, K.B.; Ghosh, B.K. Adaptive Event-Triggered Motion Tracking Control Strategy for a Lower Limb Rehabilitation Exoskeleton. In Proceedings of the 2021 60th IEEE Conference on Decision and Control (CDC), Austin, TX, USA, 13–17 December 2021. [Google Scholar]
- Dai, Q.X.; Ma, M.H. Practical tracking of robotic manipulator via impulsive control. J. Jiamusi Univ. 2021, 39, 111–115. [Google Scholar]
- Yang, N.J.; Yu, Y.B.; Zhong, S.M.; Wang, X.X.; Shi, K.B.; Cai, J.Y. Exponential Stability of Markovian Jumping Memristor-Based Neural Networks via Event-Triggered Impulsive Control Scheme. IEEE Access 2020, 8, 32564–32574. [Google Scholar] [CrossRef]
- Zhu, H.T.; Lu, J.Q.; Lou, J.G. Event-Triggered Impulsive Control for Nonlinear Systems: The Control Packet Loss Case. EEE Trans. Circuits Syst. II Express Briefs 2022, 69, 3204–3208. [Google Scholar] [CrossRef]
- Yang, X.Y.; Peng, D.X.; Lv, X.X.; Li, X.D. Recent progress in impulsive control systems. Math Comput. Simulat. 2019, 155, 244–268. [Google Scholar] [CrossRef]
- Ma, M.H.; Cai, J.P.; Zhou, J. Adaptive practical synchronisation of Lagrangian networks with a directed graph via pinning control. IET Control Theory Appl. 2015, 9, 2157–2164. [Google Scholar] [CrossRef]
- Ma, M.H.; Zhou, J.; Cai, J.P. Impulsive practical tracking synchronization of networked uncertain Lagrangian systems without and with time-delays. Physica A 2014, 415, 116–132. [Google Scholar] [CrossRef]
- Chang, C.H.; Casas, J.; Duenas, V.H. A Switched Systems Approach for Closed-loop Control of a Lower-Limb Cable-Driven Exoskeleton. In Proceedings of the American Control Conference (ACC), Atlanta, GA, USA, 8–10 June 2022. [Google Scholar]
- Liao, H.P.; Chan, H.H.; Gao, F.; Zhao, X.; Liu, G.Y.; Liao, W.H. Proxy-based torque control of motor-driven exoskeletons for safe and compliant human-exoskeleton interaction. Mechatronics 2022, 88, 102906. [Google Scholar] [CrossRef]
- Peng, D.X.; Li, X.X.; Rakkiyappan, R.; Ding, Y.H. Stabilization of stochastic delayed systems: Event-triggered impulsive control. Appl. Math. Comput. 2021, 401, 126054. [Google Scholar] [CrossRef]
- Zhang, Z.H.; Peng, S.G.; Liu, D.R.; Wang, Y.H.; Chen, T. Leader-following mean-square consensus of stochastic multiagent systems with ROUs and RONs via distributed event-triggered impulsive control. IEEE Trans. Cybern. 2020, 52, 1836–1849. [Google Scholar] [CrossRef]
- Chen, T.; Peng, S.G.; Zhang, Z.H. Finite-time consensus of leader-following non-linear multi-agent systems via event-triggered impulsive control. IET Control Theory Appl. 2021, 15, 926–936. [Google Scholar] [CrossRef]
- Liu, Y.; Peng, S.G.; Du, Y.X.; Liao, W.H. Lower Limb Exoskeleton Robot Dynamic Modeling and LQR Control of Gait Tracking. Comput. Simul. 2021, 38, 296–301. [Google Scholar]
- Liu, Y.; Zhang, J.J.; Liao, W.H. Dynamic Modeling and Identification of Wearable Lower Limb Rehabilitation Exoskeleton Robots. In Proceedings of the 4th International Conference on Control and Robotics (ICCR), Guangzhou, China, 2–4 December 2022. [Google Scholar]
- Liang, F.Y.; Gao, F.; Liao, W.H. Synergy-based Knee Angle Estimation Using Kinematics of Thigh. Gait Posture 2021, 89, 25–30. [Google Scholar] [CrossRef] [PubMed]
- Liang, F.Y.; Gao, F.; Cao, J.; Law, S.W.; Liao, W.H. Gait Synergy Analysis and Modeling on Amputees and Stroke Patients for Lower Limb Assistive Devices. Sensors 2022, 22, 4814. [Google Scholar] [CrossRef] [PubMed]
- Lin, J.; Cai, J.P.; Ma, M.H. Impulsive practical synchronization of hyperchaotic systems with uncertain parameters. In Proceedings of the 2015 27th Chinese Control and Decision Conference (CCDC), Qingdao, China, 23–25 May 2015. [Google Scholar]
- Zhang, Y.P.; Cao, G.Z.; Li, W.Z.; Chen, J.; Li, J.C.; Li, L.L.; Diao, D.F. A Self-Adaptive-Coefficient-Double-Power Sliding Mode Control Method for Lower Limb Rehabilitation Exoskeleton Robot. Appl. Sci. 2021, 11, 10329. [Google Scholar] [CrossRef]
- Ma, M.H. Practical Synchronization and Control of Lagrange Networks and Its Related Problems. Ph.D. Thesis, Shanghai University, Shanghai, China, 2015. [Google Scholar]
- Wang, M.Z.; Li, P.; Li, X.D. Event-triggered delayed impulsive control for input-to-state stability of nonlinear impulsive systems. Nonlinear Anal. Hybrid Syst. 2022, 47, 101277. [Google Scholar] [CrossRef]
- Li, X.; Song, S. Stabilization of delay systems: Delay-dependent impulsive control. IEEE Trans. Automat. Contr. 2016, 62, 406–411. [Google Scholar] [CrossRef]
- Martin-Felez, R.; Mollineda, R.A.; Sanchez, J.S. A gender recognition experiment on the CASIA gait database dealing with its imbalanced nature. In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP), Angers, France, 17–21 May 2010. [Google Scholar]












Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Peng, S.; Zhang, J.; Xie, K.; Lin, Z.; Liao, W.-H. Event-Triggered Sliding Mode Impulsive Control for Lower Limb Rehabilitation Exoskeleton Robot Gait Tracking. Symmetry 2023, 15, 224. https://doi.org/10.3390/sym15010224
Liu Y, Peng S, Zhang J, Xie K, Lin Z, Liao W-H. Event-Triggered Sliding Mode Impulsive Control for Lower Limb Rehabilitation Exoskeleton Robot Gait Tracking. Symmetry. 2023; 15(1):224. https://doi.org/10.3390/sym15010224
Chicago/Turabian StyleLiu, Yang, Shiguo Peng, Jiajun Zhang, Kan Xie, Zhuoyi Lin, and Wei-Hsin Liao. 2023. "Event-Triggered Sliding Mode Impulsive Control for Lower Limb Rehabilitation Exoskeleton Robot Gait Tracking" Symmetry 15, no. 1: 224. https://doi.org/10.3390/sym15010224