
Highly Efficient Numerical Integrator for the Circular Restricted Three-Body Problem


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Numerical Methods
2.1. The Co-rotating System
2.2. The Explicitly Symmetric Integrator
3. Energy Error Analysis
4. The Symplectic Property
5. Numerical Experiments
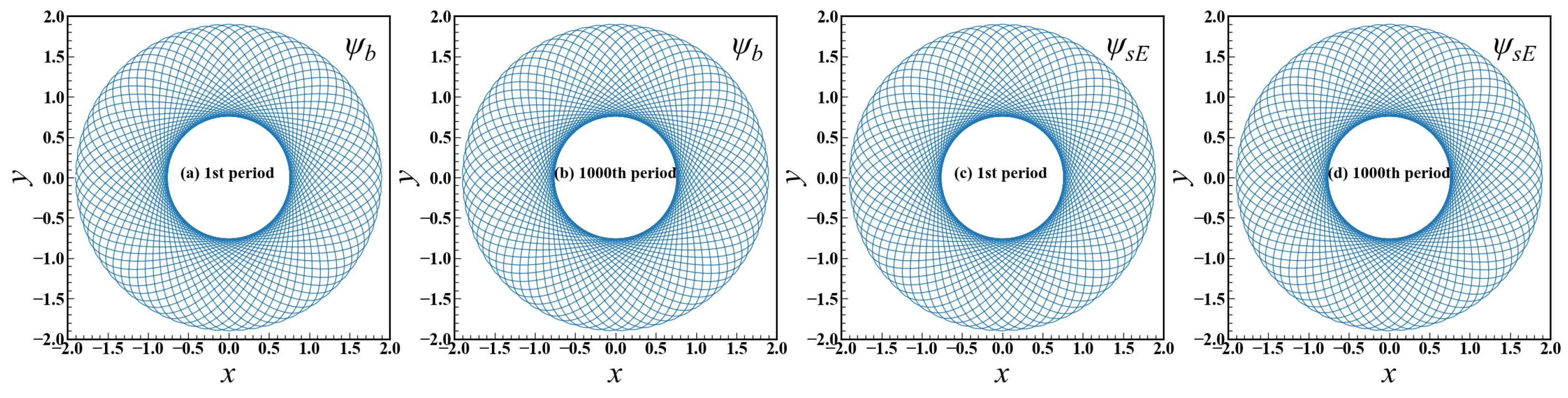
5.1. Quadratic Potential
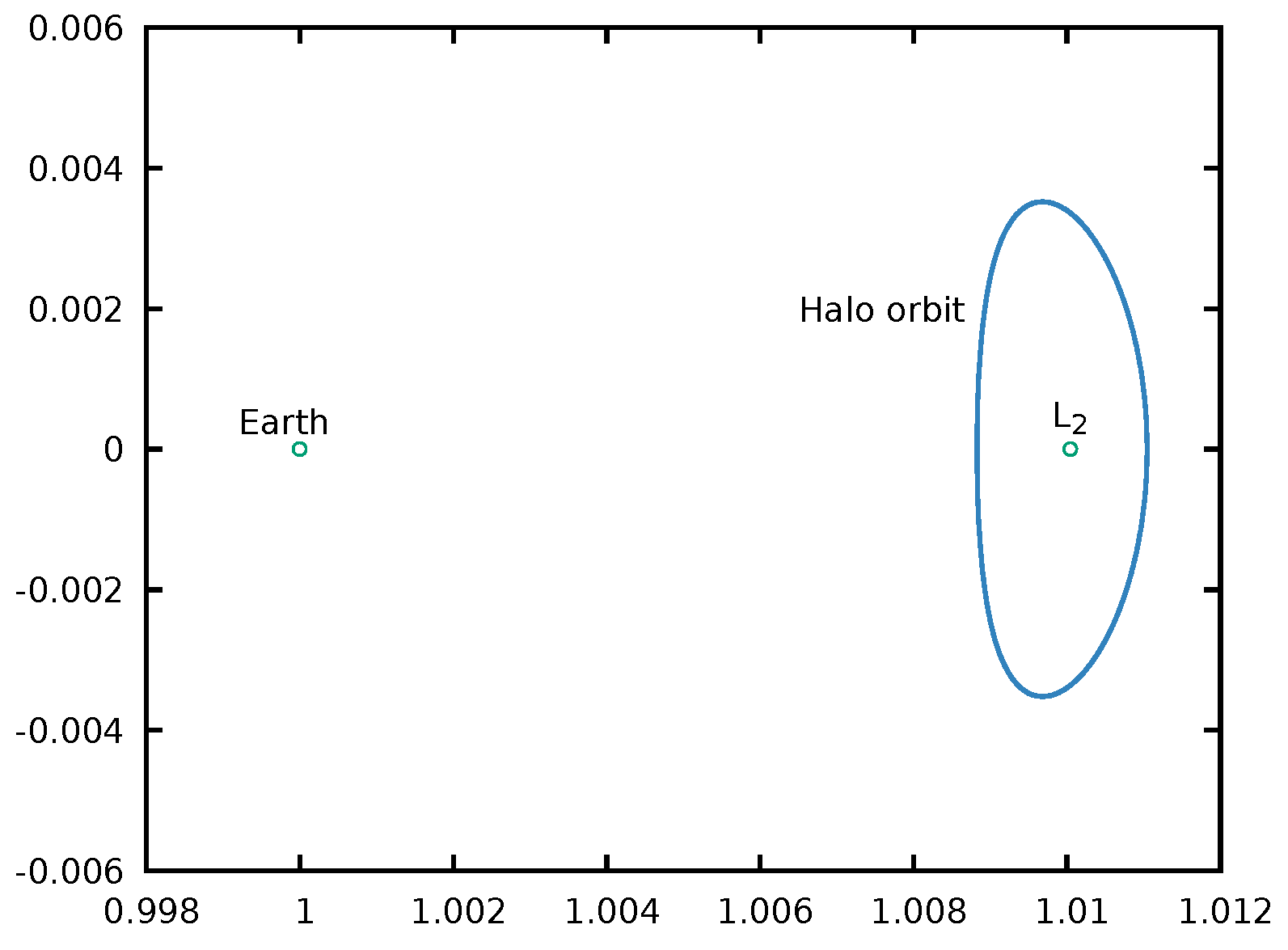
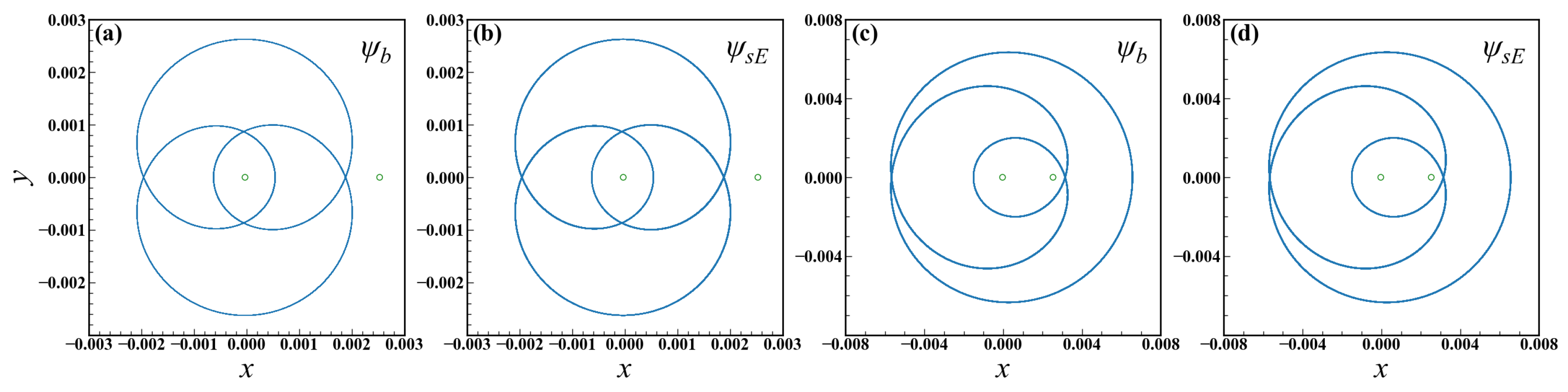
5.2. Earth-Moon System
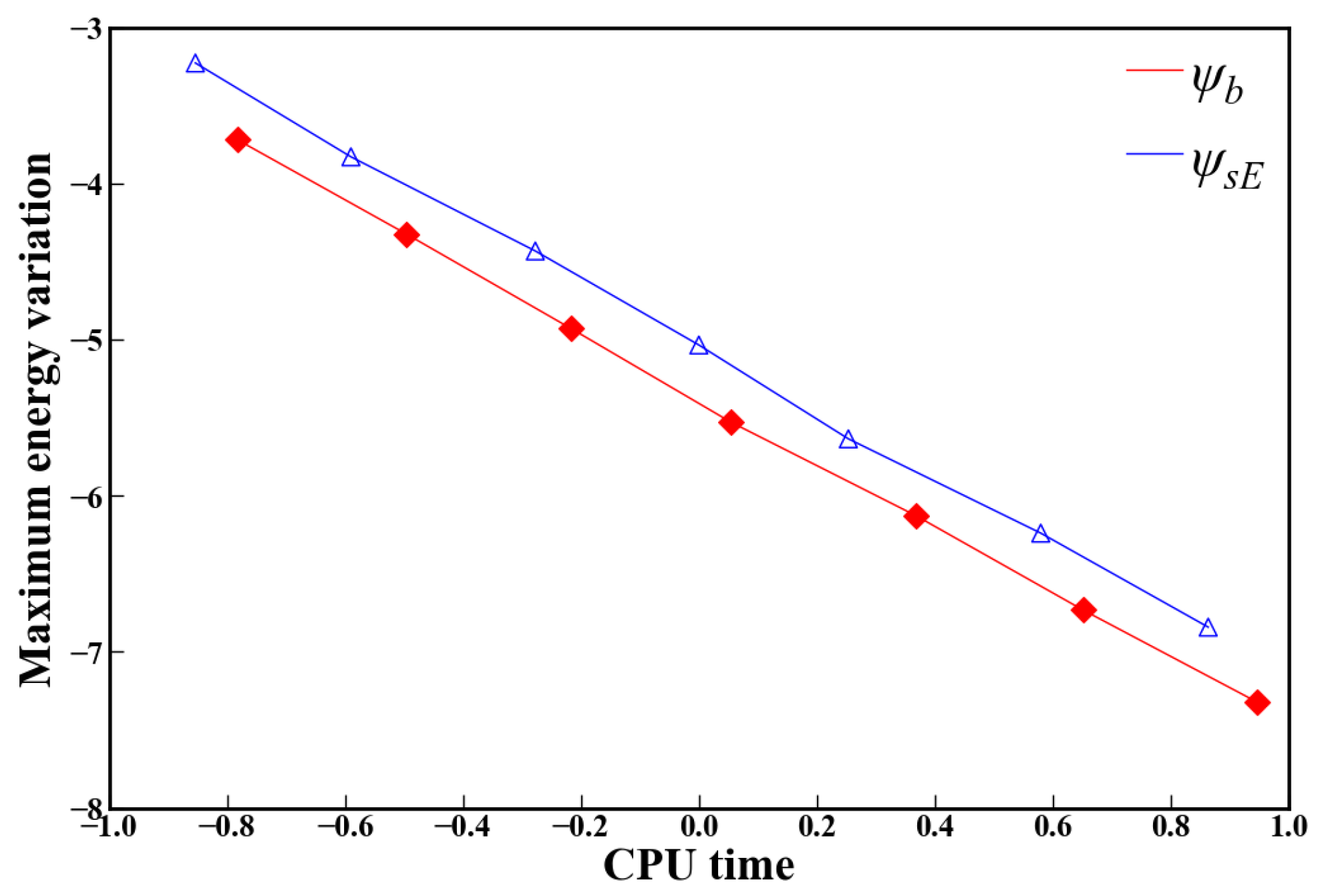
5.3. High Order Composition Method
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Feng, K. On difference schemes and symplectic geometry. In Proceedings of 1984 Beijing Symposium on Differential Geometry and Differential Equations; Feng, K., Ed.; Science Press: Beijing, China, 1985; pp. 42–58. [Google Scholar]
- Feng, K. Difference Schemes for Hamiltonian Formalism and Symplectic Geometry. J. Comput. Math. 1986, 4, 279–289. [Google Scholar]
- Forest, E.; Ruth, R.D. Fourth-order symplectic integration. Phys. D Nonlinear Phenom. 1990, 43, 105–117. [Google Scholar] [CrossRef]
- Channell, P.J.; Scovel, C. Symplectic integration of Hamiltonian systems. Nonlinearity 1990, 3, 231–259. [Google Scholar] [CrossRef]
- Candy, J.; Rozmus, W. A symplectic integration algorithm for separable Hamiltonian functions. J. Comput. Phys. 1991, 92, 230–256. [Google Scholar] [CrossRef]
- Huang, L.Y.; Tian, Z.W.; Cai, Y.X. Compact Local Structure-Preserving Algorithms for the Nonlinear Schrödinger Equation with Wave Operator. Math. Probl. Eng. 2020, 2020, 4345278. [Google Scholar] [CrossRef]
- Kong, L.H.; Chen, M.; Yin, X.l. A novel kind of efficient symplectic scheme for Klein–Gordon–Schrödinger equation. Appl. Numer. Math. 2019, 135, 481–496. [Google Scholar] [CrossRef]
- Boris, J. Relativistic plasma simulation-optimization of a hybrid code. In Proceeding of Fourth Conference on Numerical Simulations of Plasmas; Naval Research Laboratory: Washington, DC, USA, 1970; pp. 3–67. [Google Scholar]
- Qin, H.; Zhang, S.X.; Xiao, J.Y.; Liu, J.; Sun, Y.J.; Tang, W.M. Why is Boris algorithm so good? Phys. Plasmas 2013, 20, 084503. [Google Scholar] [CrossRef]
- Ellison, C.L.; Burby, J.W.; Qin, H. Comment on “Symplectic integration of magnetic systems”: A proof that the Boris algorithm is not variational. J. Comput. Phys. 2015, 301, 489–493. [Google Scholar] [CrossRef]
- He, Y.; Sun, Y.J.; Liu, J.; Qin, H. Volume-preserving algorithms for charged particle dynamics. J. Comput. Phys. 2015, 281, 135–147. [Google Scholar] [CrossRef]
- Zhang, R.L.; Liu, J.; Qin, H.; Wang, Y.L.; He, Y.; Sun, Y.J. Volume-preserving algorithm for secular relativistic dynamics of charged particles. Phys. Plasmas 2015, 22, 044501. [Google Scholar] [CrossRef]
- He, Y.; Sun, Y.J.; Liu, J.; Qin, H. Higher order volume-preserving schemes for charged particle dynamics. J. Comput. Phys. 2016, 305, 172–184. [Google Scholar] [CrossRef]
- Hairer, E.; Lubich, C. Energy behaviour of the Boris method for charged-particle dynamics. BIT Numer. Math. 2018, 301, 969–979. [Google Scholar] [CrossRef]
- Broucke, R.A. Periodic Orbits in the Restricted Three Body Problem with Earth-Moon Masses; Technical Report; Jet Propulsion Laboratory: Pasadena, CA, USA, 1968. [Google Scholar]
- Murray, C.D.; Dermott, S.F. Solar System Dynamics; Cambridge University Press: Cambridge, UK, 1999. [Google Scholar]
- Hairer, E.; Lubich, C.; Wanner, G. Geometric Numerical Integration: Structure-Preserving Algorithms for Ordinary Differential Equations, 2nd ed.; Springer: Berlin, Germany, 2006. [Google Scholar]
- Tang, Y.F. Formal energy of a symplectic scheme for hamiltonian systems and its applications (I). Comput. Math. Appl. 1994, 27, 31–39. [Google Scholar]
- Gao, F.B.; Zhang, W. A Study on Periodic Solutions for the Circular Restricted Three-body Problem. Astron. J. 2014, 148, 116. [Google Scholar] [CrossRef]
- Perdomo, O. On the period of the periodic orbits of the restricted three body problem. Celest. Mech. Dyn. Astron. 2017, 129, 89–104. [Google Scholar] [CrossRef]
- Abouelmagd, E.I.; Guirao, J.L.G.; Pal, A.K. Periodic solution of the nonlinear Sitnikov restricted three-body problem. New Astron. 2020, 75, 101319. [Google Scholar] [CrossRef]
- Tu, X.B.; Murua, A.; Tang, Y.F. New high order symplectic integrators via generating functions with its application in many-body problem. BIT Numer. Math. 2020, 129, 509–535. [Google Scholar] [CrossRef]
- Sofroniou, M.; Spaletta, G. Derivation of symmetric composition constants for symmetric integrators. Optim. Methods Softw. 2005, 20, 597–613. [Google Scholar] [CrossRef]






Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tu, X.; Wang, Q.; Tang, Y. Highly Efficient Numerical Integrator for the Circular Restricted Three-Body Problem. Symmetry 2022, 14, 1769. https://doi.org/10.3390/sym14091769
Tu X, Wang Q, Tang Y. Highly Efficient Numerical Integrator for the Circular Restricted Three-Body Problem. Symmetry. 2022; 14(9):1769. https://doi.org/10.3390/sym14091769
Chicago/Turabian StyleTu, Xiongbiao, Qiao Wang, and Yifa Tang. 2022. "Highly Efficient Numerical Integrator for the Circular Restricted Three-Body Problem" Symmetry 14, no. 9: 1769. https://doi.org/10.3390/sym14091769