
Generalized Type-2 Fuzzy Parameter Adaptation in the Marine Predator Algorithm for Fuzzy Controller Parameterization in Mobile Robots



Abstract
:1. Introduction
2. Fuzzy Systems
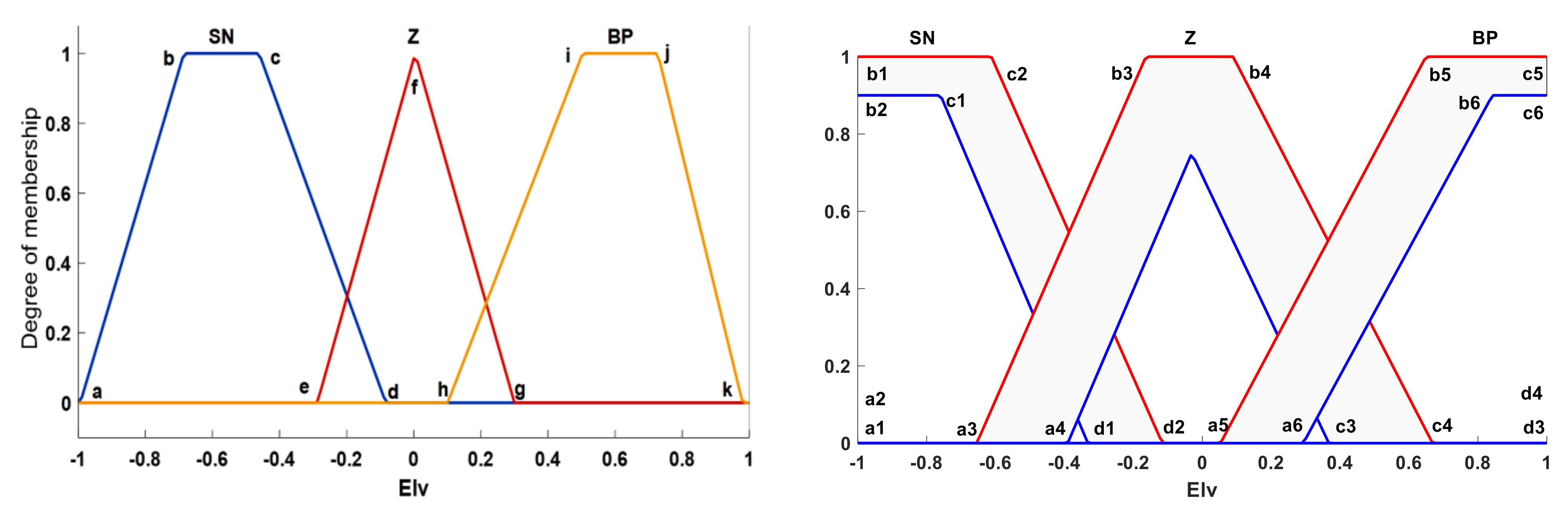
2.1. Type-1 Fuzzy Systems
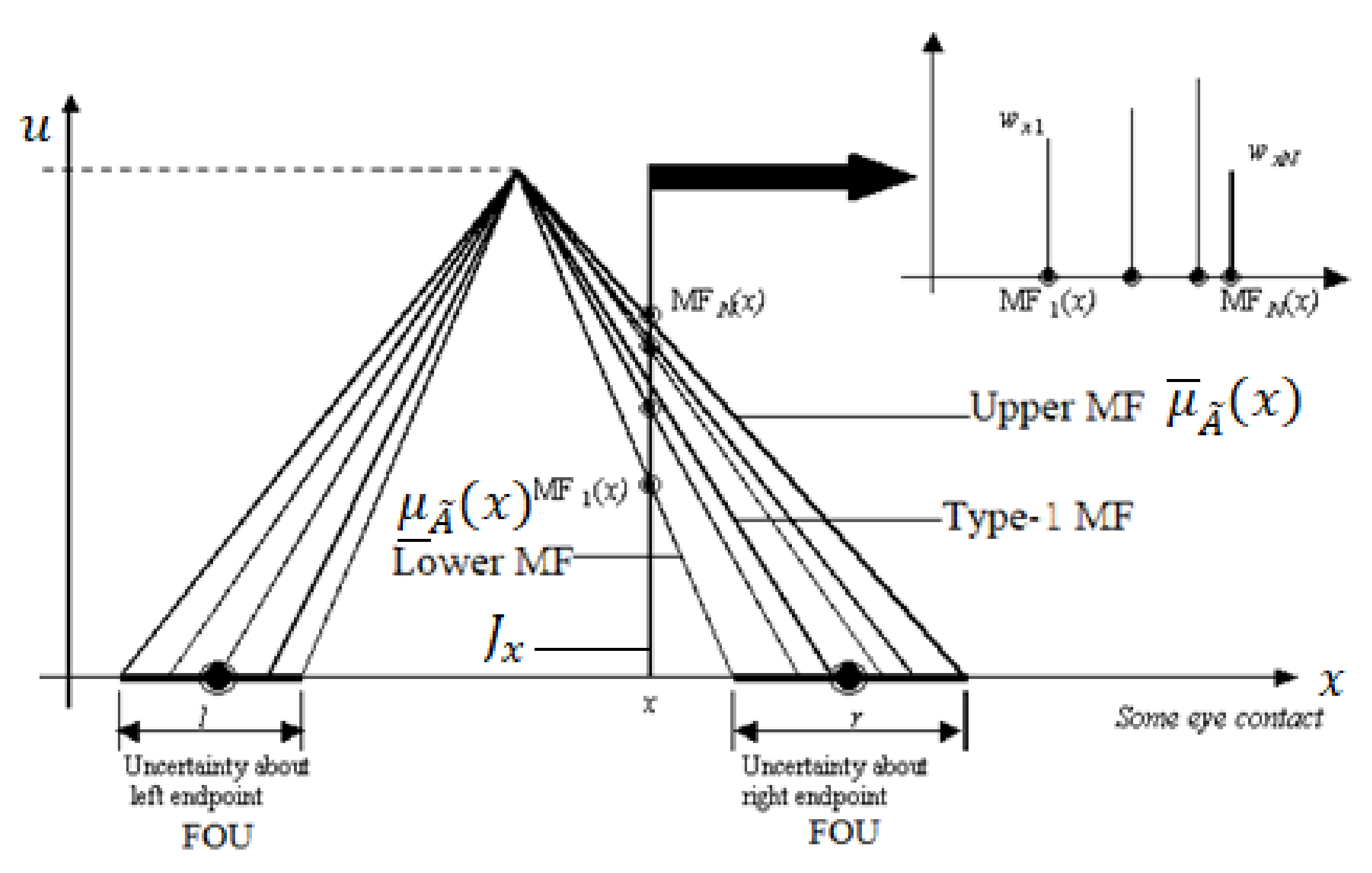
2.2. Interval Type-2 Fuzzy Systems
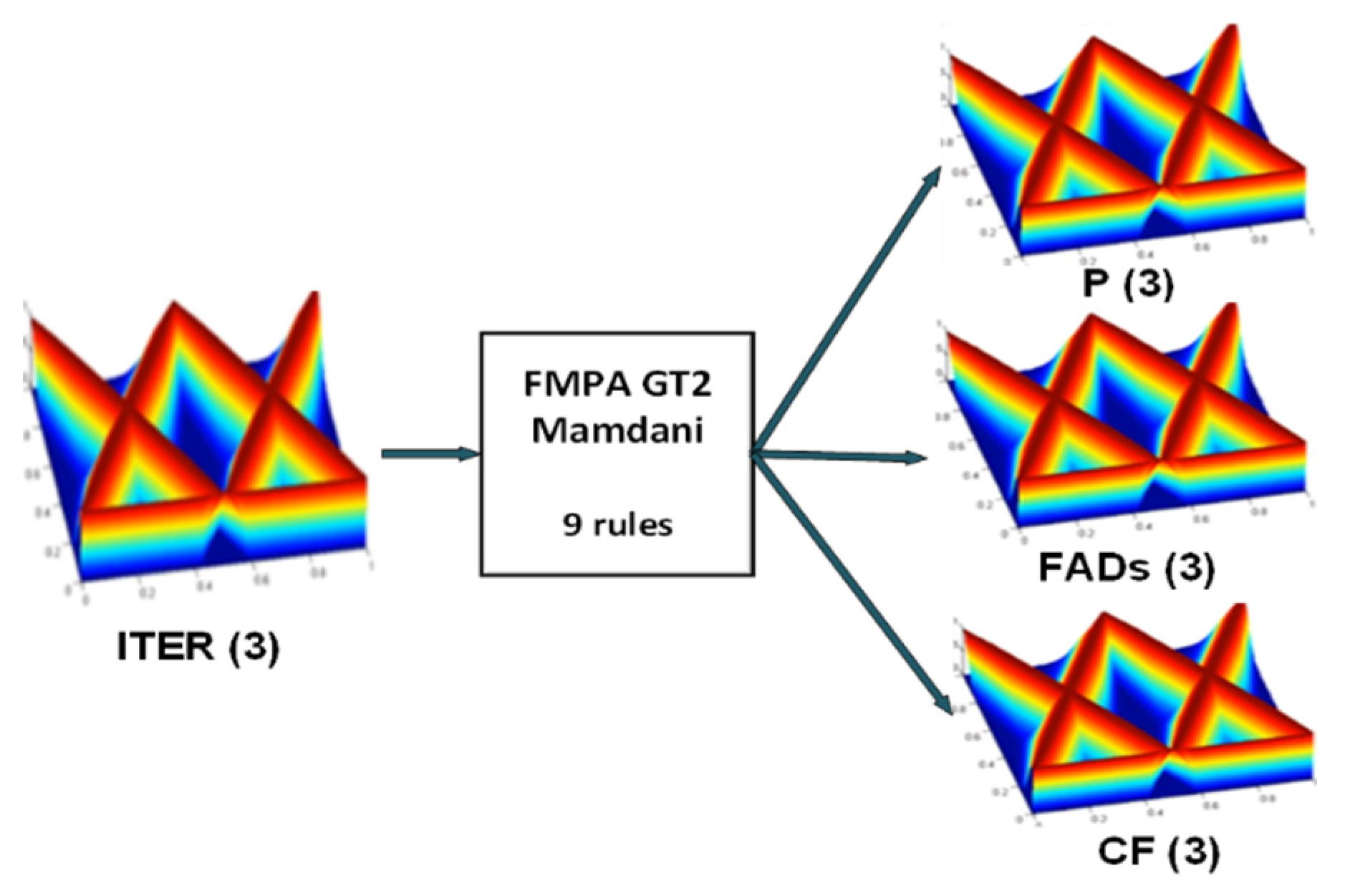
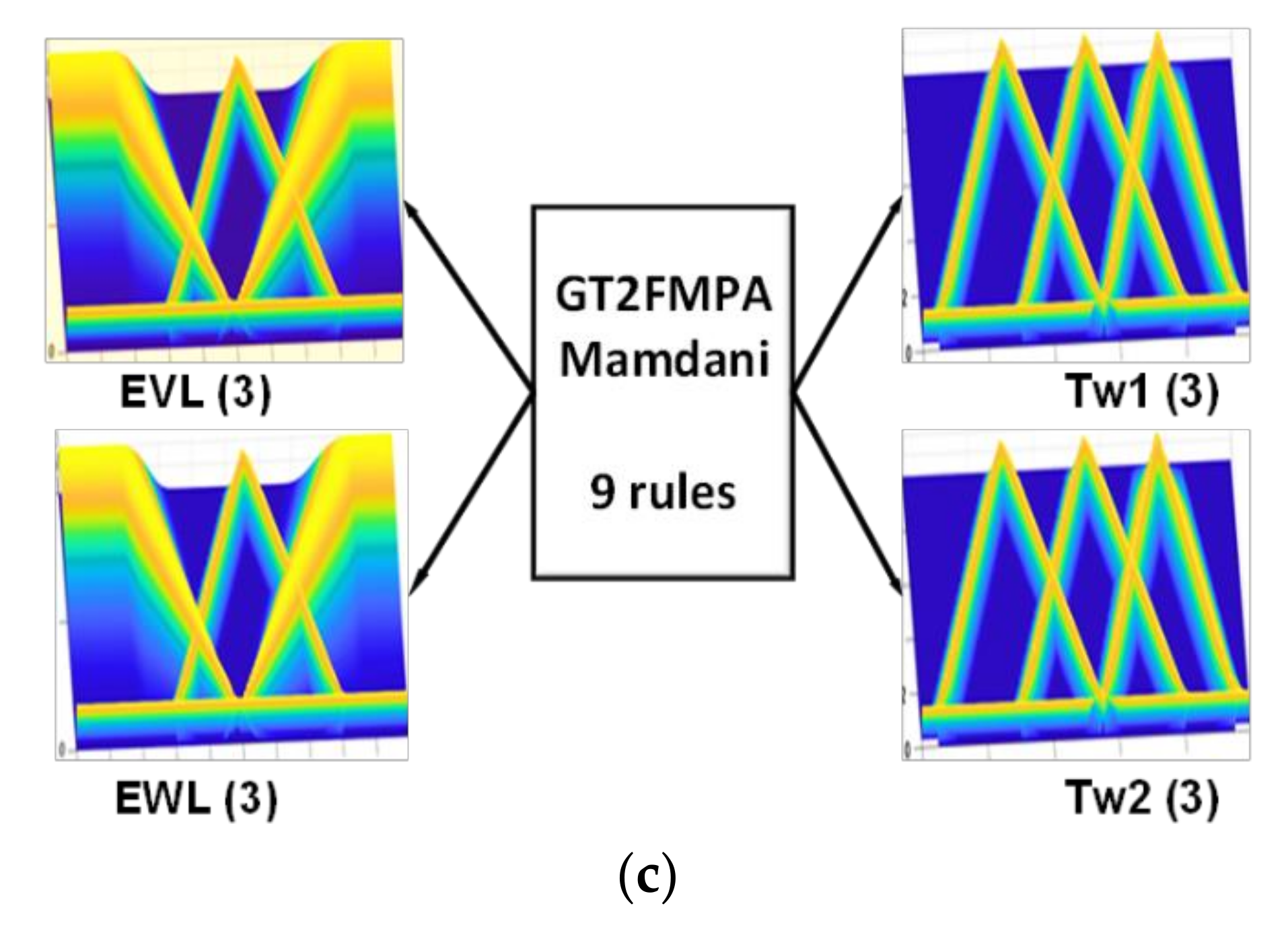
2.3. Generalized Type-2 System
2.3.1. The Fuzzification Stage
2.3.2. The Inference Stage
2.3.3. Interpretation of α-Planes
2.3.4. Type Reduction
2.3.5. The Defuzzification Stage
3. Metaheuristic of Marine Predators
3.1. Marine Predator Algorithm
3.1.1. Brownian Motion
3.1.2. Levy Movement
3.1.3. High-Velocity-Rate Scenario
3.1.4. Velocity Rate Unit Scenario
- -
- A process for the first half of the population:
- -
- A process with the second half of the population:
3.1.5. Low-Velocity-Rate Scenario
3.2. Fuzzy Marine Predator Algorithm (FMPA) Design
| Algorithm 1. The fuzzy MPA |
| START STAGE 1 (Initialization): Initialize search agents (prey) (i = 1, 2, 3,…n) Set parameters value Fuzzy evaluation of the main parameters P, FAD, and CF by FMPA Top_Predator_Fit == MAX_VALUEX Top_Predator_Position = NULL While (Iter < termination criteria are not met: For each i prey Calculate the fitness value of prey End for construct the elite matrix accomplish the memory saving. START STAGE 2: (FMPA optimization is divided into three main phases): For each i prey / Scenario 1 If Update the current prey with Equation (27) / Scenario 2 Else if *Max_Iter / The first half of the populations (i = 1,…,n/2) Update the current prey with Equation (28) / The second half of the population (i = n/2,…,n) Update the current prey with Equation (29) / Scenario 3 Else if *Max_Iter Update the current prey with Equation (31) End (if) End For START STAGE 3 (Detecting top predator): Recalculate the fitness value of prey if (Top_Predator_Position < Top_Predator_Best) Top_Predator_Best = Predator Top_Predator_Position = End (if) Achieve memory saving and elite update Accomplish the FADs’ effect for each predator and update using Equation (32) It ++ End while |
4. Study Cases for Testing the Proposal
4.1. Study Case CEC2017 Benchmark Functions
4.2. Mobile Robot Controller
Objective Function Formulation
5. Experimentation Results
5.1. Case 1: Experimentation and Statistical Analysis
- Dimensions: D = 30, 50, 100.
- Space search: [−100, 100] D.
- The maximum number of the function’s evaluations: 1000*D.
- Optimization trials per problem: 30.
- The optimization process is finished upon completing of the maximum number of the function’s evaluations.
5.2. Case 2: Mobile Robot Fuzzy Controller Optimization
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Faramarzi, A.; Heidarinejad, M.; Mirjalili, S.; Gandomi, A.H. Marine Predators Algorithm: A nature-inspired metaheuristic. Expert Syst. Appl. 2020, 152, 113377. [Google Scholar] [CrossRef]
- Rezk, H.; Inayat, A.; Abdelkareem, M.A.; Olabi, A.G.; Nassef, A.M. Optimal operating parameter determination based on fuzzy logic modeling and marine predators algorithm approaches to improve the methane production via biomass gasification. Energy 2022, 239, 122072. [Google Scholar] [CrossRef]
- Ho, L.V.; Nguyen, D.H.; Mousavi, M.; De Roeck, G.; Bui-Tien, T.; Gandomi, A.H.; Wahab, M.A. A hybrid computational intelligence approach for structural damage detection using marine predator algorithm and feedforward neural networks. Comput. Struct. 2021, 252, 106568. [Google Scholar] [CrossRef]
- Yousri, D.; Babu, T.S.; Beshr, E.; Eteiba, M.B.; Allam, D. A Robust Strategy Based on Marine Predators Algorithm for Large Scale Photovoltaic Array Reconfiguration to Mitigate the Partial Shading Effect on the Performance of PV System. IEEE Access 2020, 8, 112407–112426. [Google Scholar] [CrossRef]
- Riad, N.; Anis, W.; ElKassas, A.; Hassan, A. Three-phase multilevel inverter using selective harmonic elimination with marine predator algorithm. Electronics 2021, 10, 374. [Google Scholar] [CrossRef]
- Yakout, A.H.; Kotb, H.; Hasanien, H.M.; Aboras, K.M. Optimal Fuzzy PIDF Load Frequency Controller for Hybrid Microgrid System Using Marine Predator Algorithm. IEEE Access 2021, 9, 54220–54232. [Google Scholar] [CrossRef]
- Mahajan, S.; Mittal, N.; Pandit, A.K. Image segmentation using multilevel thresholding based on type II fuzzy entropy and marine predators algorithm. Multimed. Tools Appl. 2021, 80, 19335–19359. [Google Scholar] [CrossRef]
- Al-Qaness, M.A.; Saba, A.I.; Elsheikh, A.H.; Elaziz, M.A.; Ibrahim, R.A.; Lu, S.; Hemedan, A.A.; Shanmugan, S.; Ewees, A.A. Efficient artificial intelligence forecasting models for COVID-19 outbreak in Russia and Brazil. Process Saf. Environ. Prot. 2020, 149, 399–409. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Elhoseny, M.; Chakrabortty, R.K.; Ryan, M. A Hybrid COVID-19 Detection Model Using an Improved Marine Predators Algorithm and a Ranking-Based Diversity Reduction Strategy. IEEE Access 2020, 8, 79521–79540. [Google Scholar] [CrossRef]
- Debnath, M.K.; Jena, T.; Mallick, R.K. Optimal design of PD-Fuzzy-PID cascaded controller for automatic generation control. Cogent Eng. 2017, 4, 1416535. [Google Scholar] [CrossRef]
- Vigneysh, T.; Kumarappan, N. Autonomous operation and control of photovoltaic/solid oxide fuel cell/battery energy storage based microgrid using fuzzy logic controller. Int. J. Hydrog. Energy 2016, 41, 1877–1891. [Google Scholar] [CrossRef]
- Tang, W.K.; Man, K.F.; Chen, G.; Kwong, S. An optimal fuzzy PID controller. IEEE Trans. Ind. Electron. 2001, 48, 757–765. [Google Scholar] [CrossRef] [Green Version]
- Carvajal, J.; Chen, G.; Ogmen, H. Fuzzy PID controller: Design, performance evaluation, and stability analysis. Inf. Sci. 2000, 123, 249–270. [Google Scholar] [CrossRef]
- Cuevas, F.; Castillo, O. Design and implementation of a fuzzy path optimization system for omnidirectional autonomous mobile robot control in real-time. Swarm Intell. Data Min. 2018, 749, 241–252. [Google Scholar] [CrossRef]
- Ahmed, B.T.; Abdulhameed, O.Y. Fingerprint Authentication using Shark Smell Optimization Algorithm. UHD J. Sci. Technol. 2020, 4, 28–39. [Google Scholar] [CrossRef]
- Castillo, O.; Melin, P. Experimental study of intelligent controllers under uncertainty using Type-1 and Type-2 fuzzy logic. Type-2 Fuzzy Log. Theory Appl. 2008, 223, 121–132. [Google Scholar] [CrossRef]
- Cuevas, F.; Castillo, O.; Cortes, P. Optimal Setting of Membership Functions for Interval Type-2 Fuzzy Tracking Controllers Using a Shark Smell Metaheuristic Algorithm. Int. J. Fuzzy Syst. 2021, 24, 799–822. [Google Scholar] [CrossRef]
- Liu, Z.; Mohammadzadeh, A.; Turabieh, H.; Mafarja, M.; Band, S.S.; Mosavi, A. A new online learned Interval type-3 fuzzy control system for solar energy management systems. IEEE Access 2021, 9, 10498–10508. [Google Scholar] [CrossRef]
- Castillo, O.; Melin, P.; Valdez, F.; Soria, J.; Ontiveros-Robles, E.; Peraza, C.; Ochoa, P. Shadowed Type-2 Fuzzy systems for dynamic parameter adaptation in harmony search and Differential Evolution Algorithms. Algorithms 2019, 12, 17. [Google Scholar] [CrossRef] [Green Version]
- Castillo, O.; Peraza, C.; Ochoa, P.; Amador-Angulo, L.; Melin, P.; Park, Y.; Geem, Z. Shadowed Type-2 Fuzzy Systems for Dynamic Parameter Adaptation in Harmony Search and Differential Evolution for Optimal Design of Fuzzy Controllers. Mathematics 2021, 9, 2439. [Google Scholar] [CrossRef]
- Ochoa, G.V.; Forero, J.D.; Quiñones, L.O. Fuzzy Control of an Inverted Pendulum Systems in MATLAB/Simulink. Contemp. Eng. Sci. 2018, 11, 2857–2864. [Google Scholar] [CrossRef]
- Lagunes, M.L.; Castillo, O.; Soria, J.; Garcia, M.; Valdez, F. Optimization of granulation for fuzzy controllers of autonomous mobile robots using the Firefly Algorithm. Granul. Comput. 2018, 4, 185–195. [Google Scholar] [CrossRef]
- Bernal, E.; Castillo, O.; Soria, J.; Valdez, F. Optimization of fuzzy controller using galactic swarm optimization with Type-2 fuzzy dynamic parameter adjustment. Axioms 2019, 8, 26. [Google Scholar] [CrossRef] [Green Version]
- Rodríguez, L.; Castillo, O.; Soria, J.; Melin, P.; Valdez, F.; Gonzalez, C.I.; Martinez, G.E.; Soto, J. A fuzzy hierarchical operator in the grey wolf optimizer algorithm. Appl. Soft Comput. 2017, 57, 315–328. [Google Scholar] [CrossRef]
- Ochoa, P.; Castillo, O.; Melin, P.; Soria, J. Differential evolution with shadowed and general type-2 fuzzy systems for dynamic parameter adaptation in optimal design of Fuzzy controllers. Axioms 2021, 10, 194. [Google Scholar] [CrossRef]
- Amézquita, L.; Castillo, O.; Soria, J.; Cortes-Antonio, P. Optimal design of fuzzy controllers using the Multiverse optimizer. In Proceedings of the International Conference on Hybrid Intelligent Systems, Seattle, WA, USA, 14–16 December 2021. [Google Scholar]
- Cuevas, F. Dynamic Optimal Parameter Setting with Fuzzy Argument to Metaheuristic Algorithm Variant for Fuzzy Tracking Controllers. In Proceedings of the International Conference on Intelligent and Fuzzy Systems, Istanbul, Turkey, 21–23 July 2021; pp. 528–536. [Google Scholar] [CrossRef]
- Ontiveros, E.; Melin, P.; Castillo, O. High order α-planes integration: A new approach to computational cost reduction of General Type-2 Fuzzy Systems. Eng. Appl. Artif. Intell. 2018, 74, 186–197. [Google Scholar] [CrossRef]
- Ontiveros-Robles, E.; Melin, P.; Castillo, O. Comparative analysis of noise robustness of Type 2 fuzzy logic controllers. Kybernetika 2018, 54, 175–201. [Google Scholar] [CrossRef] [Green Version]
- Castillo, O.; Amador-Angulo, L.; Castro, J.R.; Garcia-Valdez, M. A comparative study of Type-1 fuzzy logic systems, Interval Type-2 fuzzy logic systems and Generalized Type-2 fuzzy logic systems in control problems. Inf. Sci. 2016, 354, 257–274. [Google Scholar] [CrossRef]
- Gonzalez, C.I.; Melin, P.; Castro, J.R.; Mendoza, O.; Castillo, O. An improved sobel edge detection method based on generalized Type-2 fuzzy logic. Soft Comput. 2016, 20, 773–784. [Google Scholar] [CrossRef]
- Sanchez, M.A.; Castillo, O.; Castro, J.R. Generalized Type-2 fuzzy systems for controlling a mobile robot and a performance comparison with Interval Type-2 and Type-1 fuzzy systems. Expert Syst. Appl. 2015, 42, 5904–5914. Available online: https://www.sciencedirect.com/science/article/pii/S0957417415002183 (accessed on 2 September 2018). [CrossRef]
- Melin, P.; Gonzalez, C.I.; Castro, J.R.; Mendoza, O.; Castillo, O. Edge-detection method for image processing based on Generalized Type-2 fuzzy logic. IEEE Trans. Fuzzy Syst. 2014, 22, 1515–1525. Available online: https://ieeexplore.ieee.org/abstract/document/6698367/ (accessed on 18 May 2019). [CrossRef]
- Bernal, E.; Castillo, O.; Soria, J.; Valdez, F. Generalized Type-2 fuzzy logic in galactic swarm optimization: Design of an optimal ball and beam fuzzy controller. J. Intell. Fuzzy Syst. 2020, 39, 3545–3559. [Google Scholar] [CrossRef]
- Mohammadzadeh, A.; Castillo, O.; Band, S.S.; Mosavi, A. A novel fractional-order Multiple model Type-3 fuzzy control. Int. J. Fuzzy Syst. 2021, 23, 1633–1651. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef] [Green Version]
- Zadeh, L.A. Fuzzy sets and systems. Int. J. Gen. Syst. 1990, 17, 129–138. [Google Scholar] [CrossRef]
- Oltean, S.E.; Dulau, M.; Puskas, R. Position control of Robotino mobile robot using fuzzy logic. In Proceedings of the 2010 IEEE International Conference on Automation, Quality and Testing, Robotics, AQTR 2010-Proceedings, Cluj-Napoca, Romania, 28–30 May 2010; Volume 1, pp. 366–371. [Google Scholar] [CrossRef]
- Njah, M.; Jallouli, M. Wheelchair Obstacle Avoidance Based on Fuzzy Controller and Ultrasonic Sensors. Available online: https://ieeexplore.ieee.org/abstract/document/6522062/ (accessed on 2 September 2018).
- Wu, D. On the fundamental differences between Interval Type-2 and Type-1 fuzzy logic controllers. IEEE Trans. Fuzzy Syst. 2012, 20, 832–848. [Google Scholar] [CrossRef]
- Wu, D. An Interval Type-2 fuzzy logic system cannot be implemented by traditional Type-1 fuzzy logic systems. In Proceedings of the World Conference on Soft Computing, San Francisco, CA, USA, 19–21 October 2011; Available online: http://scholar.google.com/scholar?hl=en&btnG=Search&q=intitle:An+Interval+Type-2+Fuzzy+Logic+System+Cannot+Be+Implemented+by+Traditional+Type-1+Fuzzy+Logic+Systems#1 (accessed on 20 January 2022).
- Zadeh, L.A. The concept of a linguistic variable and its application to approximate reasoning-I. Inf. Sci. 1975, 8, 199–249. [Google Scholar] [CrossRef]
- Karnik, N.N.; Mendel, J.M. Introduction to Type-2 Fuzzy Logic Systems. Available online: https://ieeexplore.ieee.org/abstract/document/686240/ (accessed on 24 May 2019).
- Liang, Q.; Mendel, J.M. Interval Type-2 fuzzy logic systems: Theory and design. IEEE Trans. Fuzzy Syst. 2000, 8, 535–550. [Google Scholar] [CrossRef] [Green Version]
- Mendel, J.M. A quantitative comparison of Interval Type-2 and Type-1 fuzzy logic systems: First results. In Proceedings of the international conference on fuzzy systems, Barcelona, Spain, 18–23 July 2010. [Google Scholar] [CrossRef]
- Castillo, O.; Melin, P.; Pedrycz, W. Design of Interval Type-2 fuzzy models through optimal granularity allocation. Appl. Soft Comput. J. 2011, 11, 5590–5601. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, C.; Tan, S.; Dai, Y.; Duan, J. Design of the footprints of uncertainty for a class of typical Interval Type-2 fuzzy PI and PD controllers. ISA Trans. 2021, 108, 1–9. [Google Scholar] [CrossRef]
- Castillo, O.; Melin, P. A review on Interval Type-2 fuzzy logic applications in intelligent control. Inf. Sci. 2014, 279, 615–631. [Google Scholar] [CrossRef]
- Awad, N.H.; Ali, M.Z.; Suganthan, P.N.; Liang, J.J.; Qu, B.Y. Problem Definitions and Evaluation Criteria for the CEC 2017 Special Session and Competition on Single Objective Bound Constrained Real-Parameter Numerical Optimization, Donostia, Spain, 5–8 June 2017. Available online: https://ieeexplore.ieee.org/abstract/document/7969336 (accessed on 20 January 2022).
- Martínez, R.; Castillo, O.; Aguilar, L.T. Optimization of Interval Type-2 fuzzy logic controllers for a perturbed autonomous wheeled mobile robot using genetic algorithms. Inf. Sci. 2009, 179, 2158–2174. [Google Scholar] [CrossRef]
- Amador-Angulo, L.; Castillo, O.; Peraza, C.; Ochoa, P. An efficient chicken search optimization algorithm for the optimal design of fuzzy controllers. Axioms 2021, 10, 30. [Google Scholar] [CrossRef]
- Liu, F. An efficient centroid type-reduction strategy for General Type-2 fuzzy logic system. Inf. Sci. 2008, 178, 2224–2236. [Google Scholar] [CrossRef]
- Peraza, C.; Valdez, F.; Melin, P. Optimization of intelligent controllers using a type-1 and interval type-2 fuzzy harmony search algorithm. Algorithms 2017, 10, 82. [Google Scholar] [CrossRef] [Green Version]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| FOU | ||
|---|---|---|
 |
| Step | Left Point | Right Point |
|---|---|---|
| 1 | Sort by increasing order | Sort by increasing order |
| 2 | Initialize as: | Initialize as: |
| 3 | Compute | Compute |
| 4 | Find where | Find where |
| 5 | Set | Set |
| 6 | Compute | Compute |
| 7 | If, then stop, set, and if not, go to step 8 | If, then stop, set, and if not, go to step 8 |
| 8 | Go to step 3 | Go to step 3 |
| Iter/ | P | FADs | CF |
|---|---|---|---|
| L | L | L | H |
| M | M | M | M |
| H | H | H | L |
| Type | No | Functions | Fi* = Fi(x*) |
|---|---|---|---|
| Unimodal Fnct | 1 | Shifted and Rotated Bent Cigar Function | 100 |
| 2 | Shifted and Rotated Zakharov Function | 200 | |
| Simple Multimodal | 3 | Shifted and Rotated Rosenbrock’s Function | 300 |
| 4 | Shifted and Rotated Rastrigin’s Function | 400 | |
| 5 | Shifted and Rotated Expanded Scaffer’s F6 fcn | 500 | |
| 6 | Shifted and Rotated LunacekBi_Rastrigin Fcn | 600 | |
| 7 | Shifted and Rotated Noncontinuous Rastrigin’s | 700 | |
| 8 | Shifted and Rotated Levy Function | 800 | |
| 9 | Shifted and Rotated Schwefel’s Function | 900 | |
| Hybrid Functions | 10 | Hybrid Function 1 (N = 3) | 1000 |
| 11 | Hybrid Function 2 (N = 3) | 1100 | |
| 12 | Hybrid Function 3 (N = 3) | 1200 | |
| 13 | Hybrid Function 4 (N = 4) | 1300 | |
| 14 | Hybrid Function 5 (N = 4) | 1400 | |
| 15 | Hybrid Function 6 (N = 4) | 1500 | |
| 16 | Hybrid Function 6 (N = 5) | 1600 | |
| 17 | Hybrid Function 6 (N = 5) | 1700 | |
| 18 | Hybrid Function 6 (N = 5) | 1800 | |
| 19 | Hybrid Function 6 (N = 6) | 1900 | |
| Composition Functions | 20 | Composition Function 1 (N = 3) | 2000 |
| 21 | Composition Function 2 (N = 3) | 2100 | |
| 22 | Composition Function 3 (N = 4) | 2200 | |
| 23 | Composition Function 4 (N = 4) | 2300 | |
| 24 | Composition Function 5 (N = 5) | 2400 | |
| 25 | Composition Function 6 (N = 5) | 2500 | |
| 26 | Composition Function 7 (N = 6) | 2600 | |
| 27 | Composition Function 8 (N = 6) | 2700 | |
| 28 | Composition Function 9 (N = 3) | 2800 | |
| 29 | Composition Function 10 (N = 3) | 2900 | |
| Search Range: [−100, 100] D | |||
| Type-1 FLS | Type-2 FLS | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Inputs | MFs | a | b | c | d | ||||||||
| N | −1 | −0.6 | −0.4 | 0 | −1 | −0.8 | −0.5 | −0.3 | −0.8 | −0.6 | −0.4 | 0 | |
| Z | −0.4 | 0 | 0.4 | - | −0.6 | −0.1 | 0.4 | -- | −0.4 | −0.07 | 0.6 | -- | |
| P | 0 | 0.4 | 0.7 | 1 | 0 | 0.4 | 0.7 | 0.8 | 0.2 | 0.6 | 0.8 | 1 | |
| N | −1 | −0.6 | −0.4 | 0 | −1 | −0.8 | −0.5 | −0.3 | −0.8 | −0.6 | −0.4 | 0 | |
| Z | −0.4 | 0 | 0.4 | - | −0.6 | −0.1 | 0.4 | -- | −0.4 | −0.07 | 0.6 | -- | |
| P | 0 | 0.4 | 0.7 | 1 | 0 | 0.4 | 0.7 | 0.8 | 0.2 | 0.6 | 0.8 | 1 | |
| Type-1 FLS | Type-2 FLS | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Outputs | MFs | a | b | c | ||||||
| N | −1 | −0.5 | 0 | −1 | −0.7 | −0.3 | −0.8 | −0.5 | −0.1 | |
| Z | −0.5 | 0 | 0.5 | −0.6 | −0.1 | 0.4 | −0.4 | 0.1 | 0.6 | |
| P | 0 | 0.5 | 1 | 0.1 | 0.4 | 0.8 | 0.3 | 0.6 | 1 | |
| N | −1 | −0.5 | 0 | −1 | −0.7 | −0.3 | −0.1 | −0.5 | −0.1 | |
| Z | −0.5 | 0 | 0.5 | −0.6 | −0.1 | 0.4 | −0.4 | 0.1 | 0.6 | |
| P | 0 | 0.5 | 1 | 0.1 | 0.4 | 0.8 | 0.3 | 0.6 | 1 | |
| Rules | Inputs | Outputs | ||
|---|---|---|---|---|
| Evl | Ewl | TW1 | TW2 | |
| 1 | N | N | N | N |
| 2 | N | Z | N | Z |
| 3 | N | P | N | P |
| 4 | Z | N | Z | N |
| 5 | Z | Z | Z | Z |
| 6 | Z | P | Z | P |
| 7 | P | N | P | N |
| 8 | P | Z | P | Z |
| 9 | P | P | P | P |
| Parameter | MPA | FMPA with T1FLS | FMPA with IT2FLS | FMPA with GT2FLS |
|---|---|---|---|---|
| SearchAgents | 100 | 100 | 100 | 100 |
| Iterations | 1000 | 1000 | 1000 | 1000 |
| 0.7 | Dyn | Dyn | Dyn | |
| 0.5 | Dyn | Dyn | Dyn | |
| Random [0, 1] | Dyn | Dyn | Dyn |
| F M P A 30D | ||||||
|---|---|---|---|---|---|---|
| I T 2 FLS | T 1 FLS | |||||
| FNC | AVERAG | DEV. STD | AVERAG | DEV. STD | Z | |
| 100 | ||||||
| 300 | ||||||
| 400 | −5.97 × | |||||
| 500 | ||||||
| 600 | ||||||
| 700 | x | −6.91 × | ||||
| 800 | ||||||
| 900 | ||||||
| 1000 | −3.19 × | |||||
| 1100 | ||||||
| 1200 | ||||||
| 1300 | −4.67 × | |||||
| 1400 | −1.24 × | |||||
| 1500 | ||||||
| 1600 | −5.48 × | |||||
| 1700 | −1.58 × | |||||
| 1800 | ||||||
| 1900 | ||||||
| F M P A 50D | ||||||
|---|---|---|---|---|---|---|
| I T 2 FLS | T 1 FLS | |||||
| FNC | AVERAG | DEV. STD | AVERAG | DEV. STD | Z | |
| 100 | −2.62 × | |||||
| 300 | ||||||
| 400 | ||||||
| 500 | ||||||
| 600 | ||||||
| 700 | ||||||
| 800 | ||||||
| 900 | −5.33 × | |||||
| 1000 | ||||||
| 1100 | −3.85 × | |||||
| 1200 | −3.04 × | |||||
| 1300 | ||||||
| 1400 | ||||||
| 1500 | ||||||
| 1600 | −2.28 × | |||||
| 1700 | ||||||
| 1800 | −4.63 × | |||||
| 1900 | −2.62 × | |||||
| F M P A 100D | ||||||
|---|---|---|---|---|---|---|
| I T 2 FLS | T 1 FLS | |||||
| FNC | AVERAG | DEV. STD | AVERAG | DEV. STD | Z | |
| 100 | ||||||
| 300 | −3.49 × | |||||
| 400 | ||||||
| 500 | ||||||
| 600 | ||||||
| 700 | ||||||
| 800 | ||||||
| 900 | ||||||
| 1000 | ||||||
| 1100 | ||||||
| 1200 | ||||||
| 1300 | ||||||
| 1400 | ||||||
| 1500 | ||||||
| 1600 | ||||||
| 1700 | ||||||
| 1800 | ||||||
| 1900 | ||||||
| F M P A 30D | ||||||
|---|---|---|---|---|---|---|
| I T 2 FLS | T 1 FLS | |||||
| FNC | AVERAG | DEV. STD | AVERAG | DEV. STD | Z | |
| 100 | ||||||
| 300 | ||||||
| 400 | . | |||||
| 500 | ||||||
| 600 | ||||||
| 700 | ||||||
| 800 | ||||||
| 900 | ||||||
| 1000 | ||||||
| 1100 | ||||||
| 1200 | ||||||
| 1300 | ||||||
| 1400 | ||||||
| 1500 | ||||||
| 1600 | ||||||
| 1700 | ||||||
| 1800 | ||||||
| 1900 | ||||||
| F M P A 50D | ||||||
|---|---|---|---|---|---|---|
| I T 2 FLS | T 1 FLS | |||||
| FNC | AVERAG | DEV. STD | AVERAG | DEV. STD | Z | |
| 100 | ||||||
| 300 | ||||||
| 400 | ||||||
| 500 | ||||||
| 600 | ||||||
| 700 | ||||||
| 800 | ||||||
| 900 | ||||||
| 1000 | ||||||
| 1100 | ||||||
| 1200 | ||||||
| 1300 | ||||||
| 1400 | ||||||
| 1500 | ||||||
| 1600 | ||||||
| 1700 | ||||||
| 1800 | ||||||
| 1900 | ||||||
| F M P A 100D | ||||||
|---|---|---|---|---|---|---|
| I T 2 FLS | T 1 FLS | |||||
| FNC | AVERAG | DEV. STD | AVERAG | DEV. STD | Z | |
| 100 | ||||||
| 300 | ||||||
| 400 | ||||||
| 500 | ||||||
| 600 | ||||||
| 700 | ||||||
| 800 | ||||||
| 900 | ||||||
| 1000 | ||||||
| 1100 | ||||||
| 1200 | ||||||
| 1300 | ||||||
| 1400 | ||||||
| 1500 | ||||||
| 1600 | ||||||
| 1700 | ||||||
| 1800 | ||||||
| 1900 | ||||||
| F M P A 30D | ||||||
|---|---|---|---|---|---|---|
| GT 2 FLS | I T 2 FLS | |||||
| FNC | AVERAG | DEV. STD | AVERAG | DEV. STD | Z | |
| 100 | ||||||
| 300 | ||||||
| 400 | ||||||
| 500 | ||||||
| 600 | ||||||
| 700 | ||||||
| 800 | ||||||
| 900 | ||||||
| 1000 | ||||||
| 1100 | ||||||
| 1200 | ||||||
| 1300 | ||||||
| 1400 | ||||||
| 1500 | ||||||
| 1600 | ||||||
| 1700 | ||||||
| 1800 | ||||||
| 1900 | ||||||
| F M P A 50D | ||||||
|---|---|---|---|---|---|---|
| GT 2 FLS | I T 2 FLS | |||||
| FNC | AVERAG | DEV. STD | AVERAG | DEV. STD | Z | |
| 100 | ||||||
| 300 | ||||||
| 400 | ||||||
| 500 | ||||||
| 600 | ||||||
| 700 | ||||||
| 800 | ||||||
| 900 | ||||||
| 1000 | ||||||
| 1100 | ||||||
| 1200 | ||||||
| 1300 | ||||||
| 1400 | ||||||
| 1500 | ||||||
| 1600 | ||||||
| 1700 | ||||||
| 1800 | ||||||
| 1900 | ||||||
| F M P A 100D | ||||||
|---|---|---|---|---|---|---|
| GT 2 FLS | I T 2 FLS | |||||
| FNC | AVERAG | DEV. STD | AVERAG | DEV. STD | Z | |
| 100 | ||||||
| 300 | ||||||
| 400 | ||||||
| 500 | ||||||
| 600 | ||||||
| 700 | ||||||
| 800 | ||||||
| 900 | ||||||
| 1000 | ||||||
| 1100 | ||||||
| 1200 | ||||||
| 1300 | ||||||
| 1400 | ||||||
| 1500 | ||||||
| 1600 | ||||||
| 1700 | ||||||
| 1800 | ||||||
| 1900 | ||||||
| Parameters | Values |
|---|---|
| SearchAgents | 50 |
| Iterations | 10 |
| Dynamic | |
| Dynamic | |
| Dynamic |
| Performance Index | Output Wheel Torque (TW1) and (TW2) | |||
|---|---|---|---|---|
| FMPAT1FLC without Noise | FMPAIT2FLC without Noise | FMPAT1FLC with Noise | FMPAIT2FLC with Noise | |
| ITAE | ||||
| ISE | ||||
| IAE | ||||
| Average | ||||
| STD | ||||
| Best | ||||
| Worst | ||||
| Z-Value | −7.5 | −1.85 | ||
| Performance Index | Output Wheel Torque (TW1) and (TW2) | |||
|---|---|---|---|---|
| FMPAIT2FLC without Noise | FMPAGT2FLC without Noise | FMPAIT2FLC with Noise | FMPAGT2FLC with Noise | |
| ITAE | ||||
| ISE | ||||
| IAE | ||||
| Average | ||||
| Std Dev | ||||
| Best | ||||
| Worst | ||||
| Z-Value | −3.068 | −83.95 | ||
| Performance Index | Output Wheel Torque (TW1) and (TW2) | |||
|---|---|---|---|---|
| FHSIT2FLC without Noise | FMPAGT2FLC without Noise | FHSIT2FLC with Noise | FMPAGT2FLC with Noise | |
| ITAE | 2.08 × | 1.93 × | ||
| ISE | 4.26 × | 3.95 × | ||
| IAE | 1.04 × | 1.19 × | ||
| Average | 3.3 × | 2.2 × | ||
| Std Dev | 2.0 × | 1.8 × | ||
| Z-Value | −4.42 | −4.78 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cuevas, F.; Castillo, O.; Cortés-Antonio, P. Generalized Type-2 Fuzzy Parameter Adaptation in the Marine Predator Algorithm for Fuzzy Controller Parameterization in Mobile Robots. Symmetry 2022, 14, 859. https://doi.org/10.3390/sym14050859
Cuevas F, Castillo O, Cortés-Antonio P. Generalized Type-2 Fuzzy Parameter Adaptation in the Marine Predator Algorithm for Fuzzy Controller Parameterization in Mobile Robots. Symmetry. 2022; 14(5):859. https://doi.org/10.3390/sym14050859
Chicago/Turabian StyleCuevas, Felizardo, Oscar Castillo, and Prometeo Cortés-Antonio. 2022. "Generalized Type-2 Fuzzy Parameter Adaptation in the Marine Predator Algorithm for Fuzzy Controller Parameterization in Mobile Robots" Symmetry 14, no. 5: 859. https://doi.org/10.3390/sym14050859