
Robust Nonlinear Non-Referenced Inertial Frame Multi-Stage PID Controller for Symmetrical Structured UAV

 ,
,
Abstract
:1. Introduction
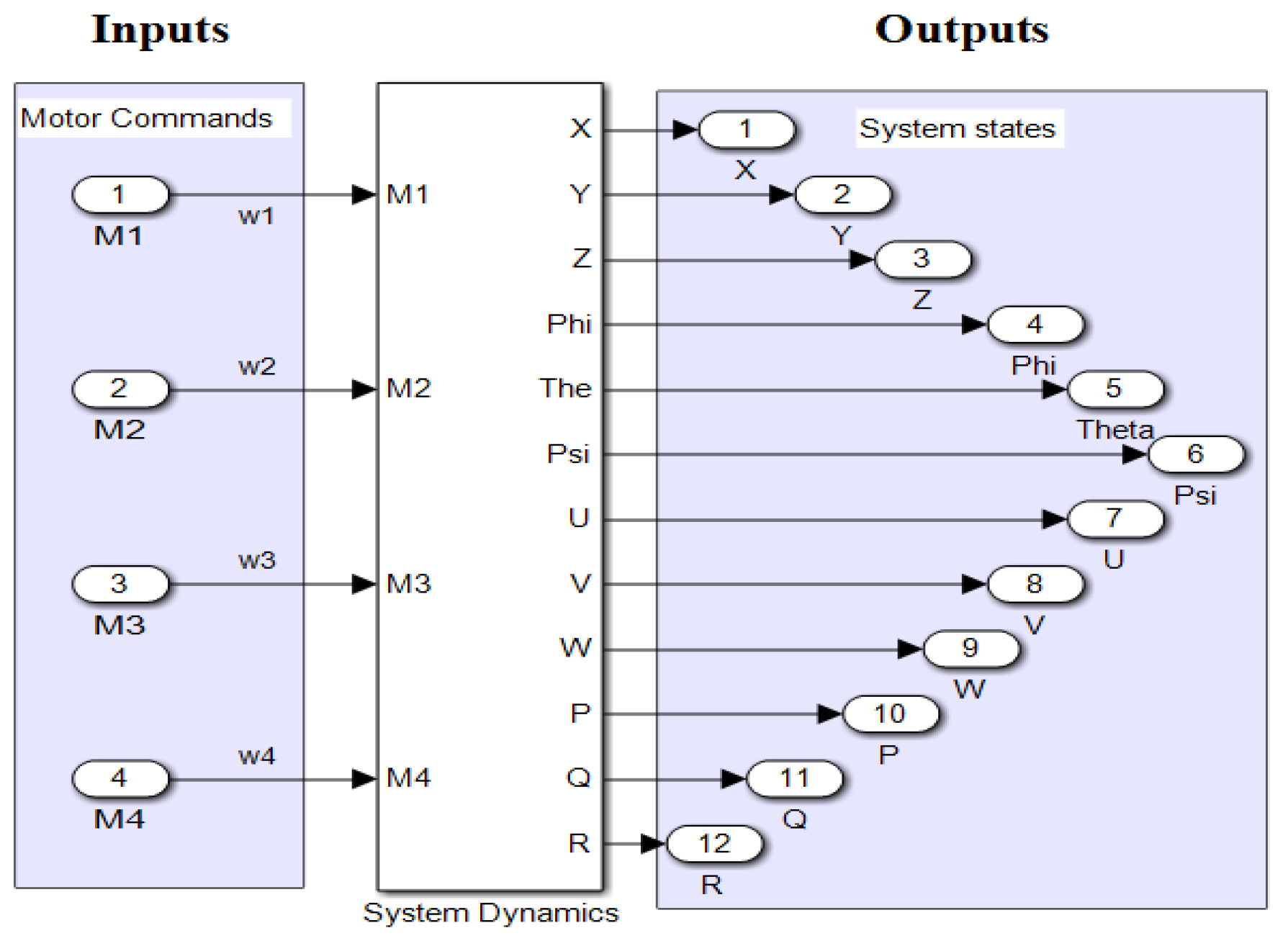
2. Symmetrical Quadcopter Modeling
2.1. Definition of Symmetrical UAV Quadrotor Variables
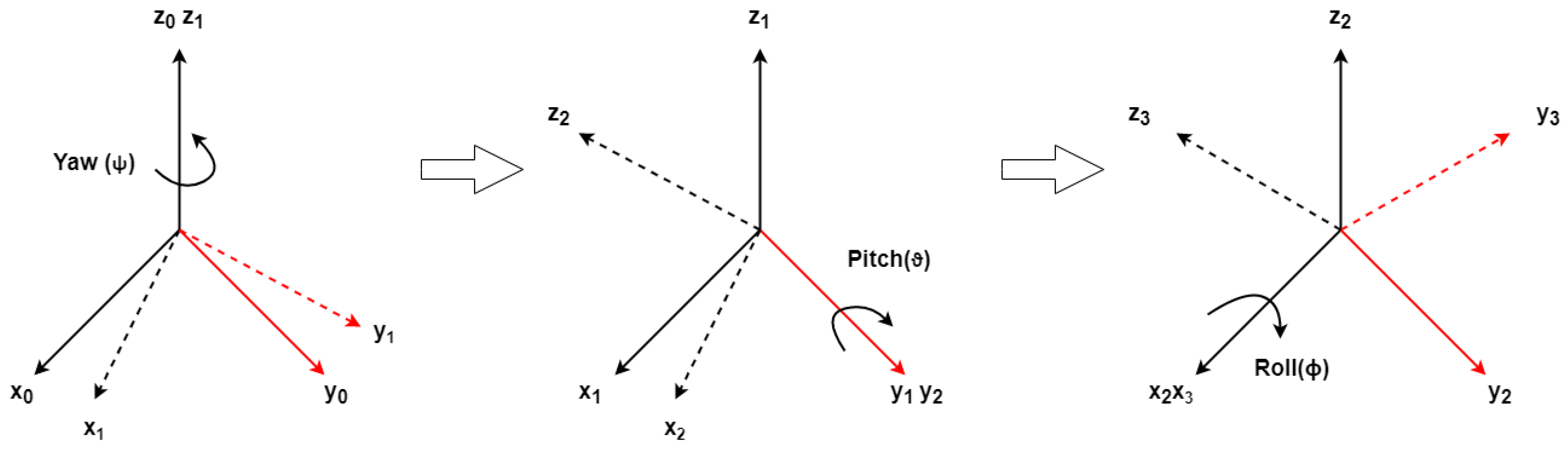
2.2. Transformation between Frames
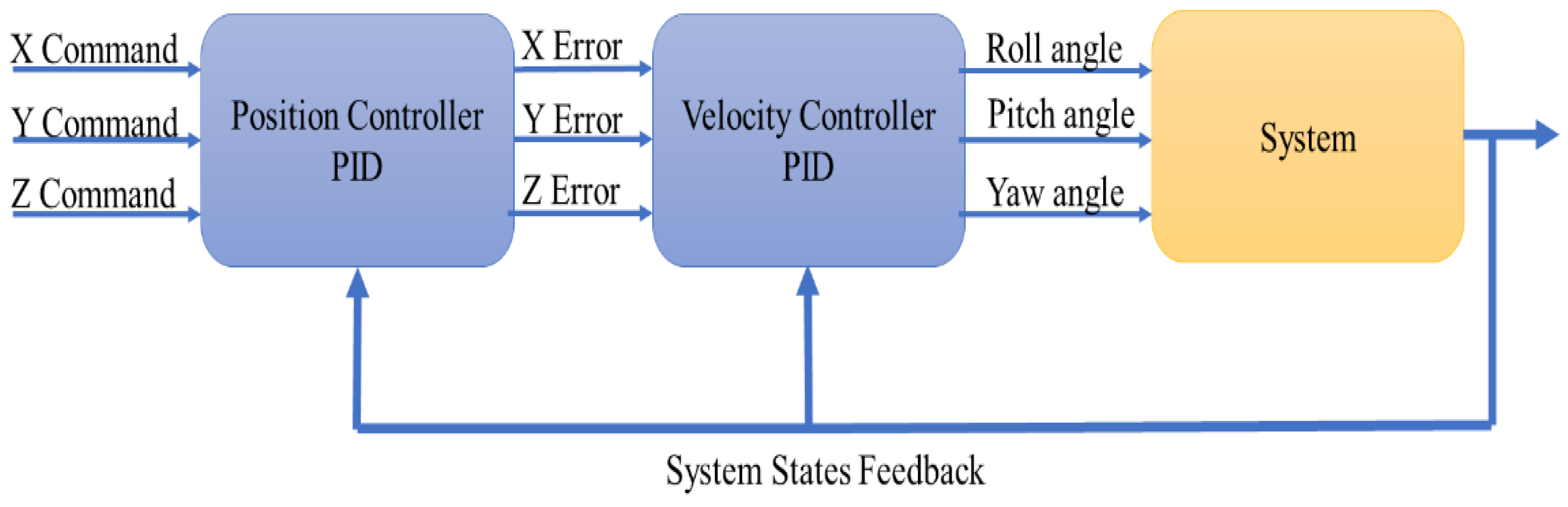
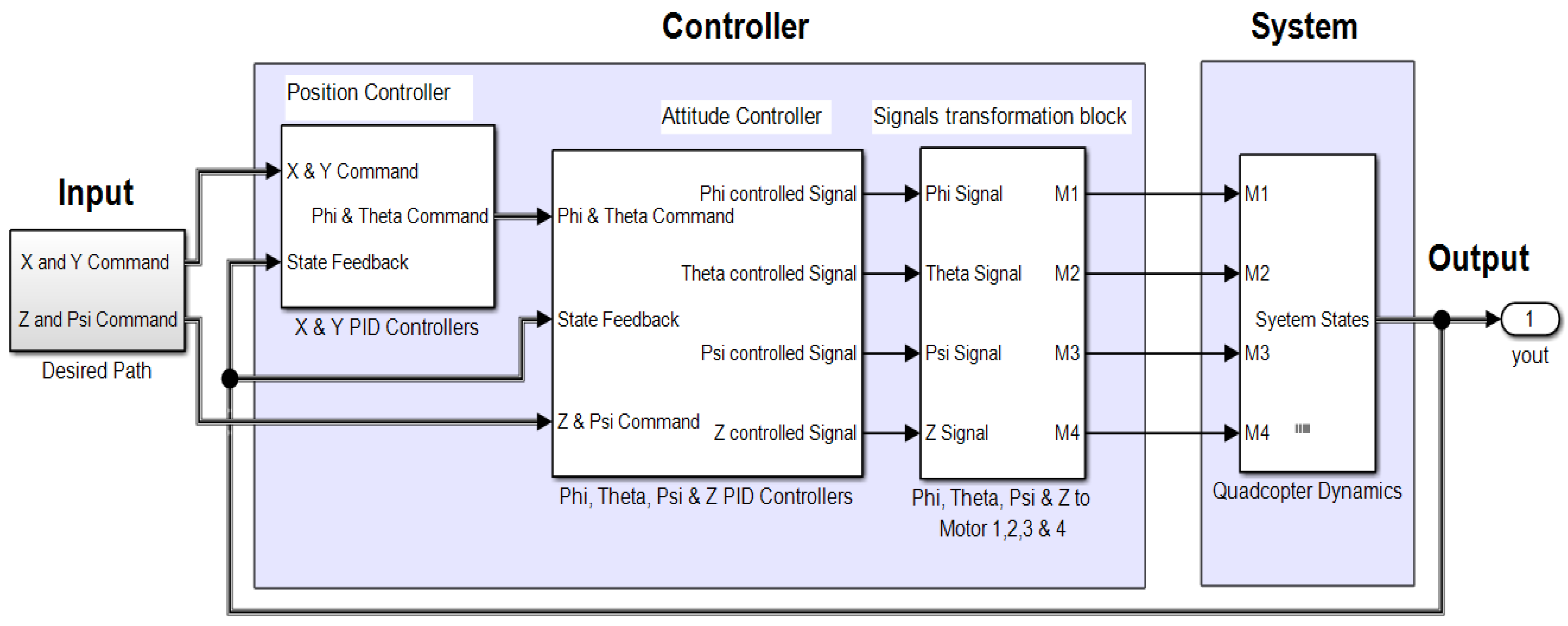
3. Multi-Stage PID Controller
4. Genetic Algorithm
- (1)
- The solutions are tested, then they are sorted as such that the first chromosome is the best solution, then the second solution is the second chromosome, and so on. The selection process is then accomplished by choosing the best half of the sorted population. The best-sorted half of the population will be the new parent chromosomes. Then, using the crossover process, 50% of the new population is generated.
- (2)
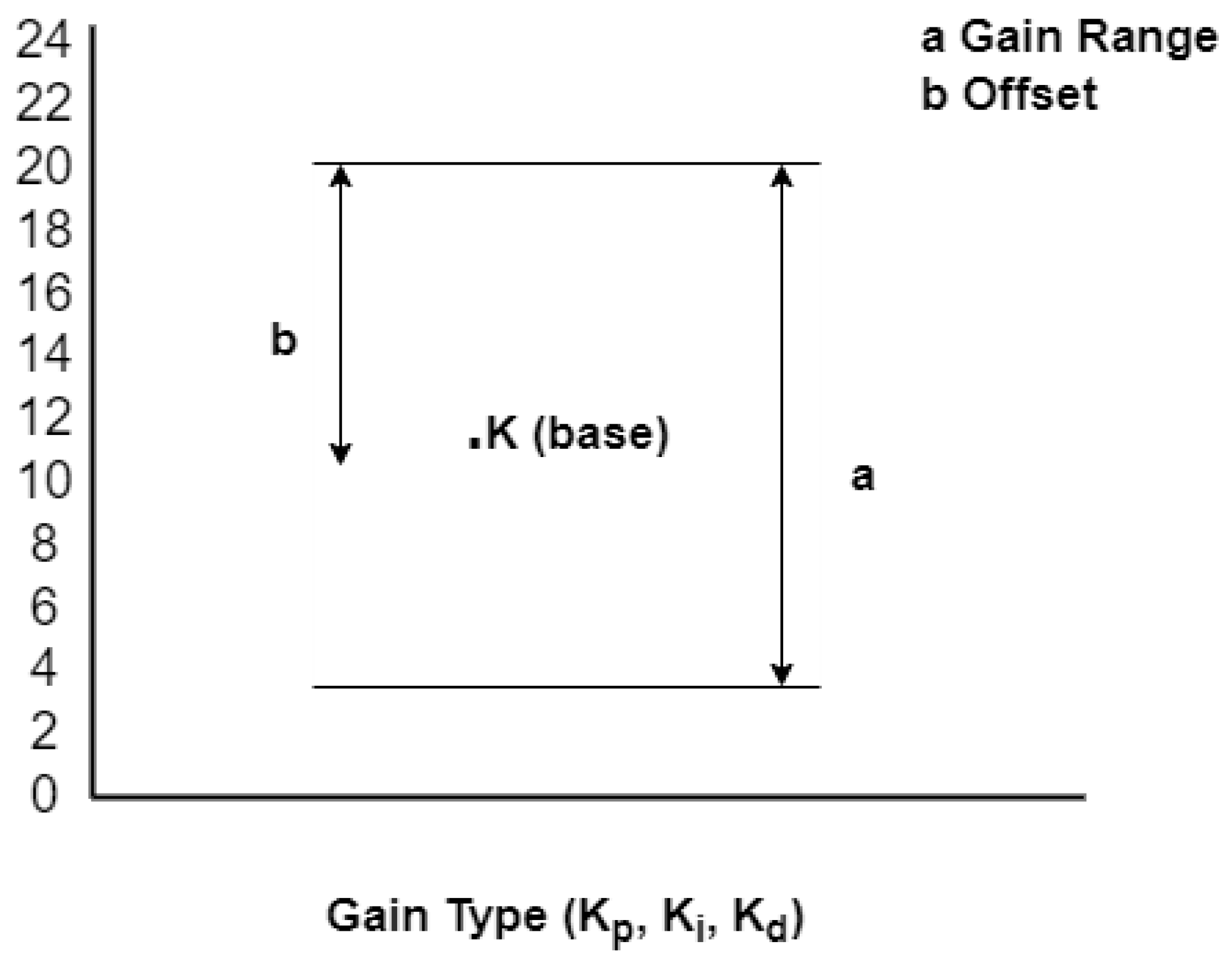
- Generated constrained random solutions are around one-third of the best-sorted solutions of the random gain range value (the gain range is very small), see Figure 8; 30% of the new population is generated using this method.
- (3)
- Generated constrained random solutions are around one-fifth of the best-sorted solutions of the old population. The main difference between this step and the previous step is the use of a wider gain range of a random value. The aim of this step is to avoid falling into the local minimum solution. This step can be considered as a mutation to refresh the optimization process.
- It uses a small number of chromosomes within the population, resulting in a minimized processing time for each iteration;
- Adaptive PID gains values for an improved control system, as shown in Equation (41);
- It improves performance by avoiding falling in the local minimum by widening the range of the gains for 20% of a new generation;
- Each iteration gains range change is based on the best solution.
5. Simulation and Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Turkoglu, K.; Ozdemir, U.; Nikbay, M.; Jafarov, E. PID parameter optimization of a UAV longitudinal Flight control system. World Acad. Sci. Eng. Technol. 2008, 45, 340–345. [Google Scholar]
- Turkoglu, K.; Jafarov, E.M. Hinf loop shaping robust control vs. classical PI(D) control: A case study on the longitudinal dynamics of hezarfen UAV. In Proceedings of the 2nd WSEAS International Conference on Dynamical Systems and Control, Bucharest, Romania, 16–17 October 2006; pp. 105–110. [Google Scholar]
- Dawes, J.; Ng, L.; Dorf, R.; Tam, C. Design of Deadbeat Robust Systems. In Proceedings of the IEEE International Conference on Control and Applications, Glasgow, UK, 24–26 August 1994; pp. 1597–1598. [Google Scholar]
- Lockheed Martin. Kestrel Autopilot System: User Guide, Copyright© 2004–2008; Procerus® Technologies: Orem, UT, USA, 2015. [Google Scholar]
- Kumar, P.V.; Challa, A.; Ashok, J.; Narayanan, G.L. GIS based fire rescue system for industries using Quad copter—A novel approach. In Proceedings of the International Conference on Microwave, Optical and Communication Engineering (ICMOCE), Bhubaneswar, India, 18–20 December 2015; pp. 72–75. [Google Scholar] [CrossRef]
- Dallal Bashi, O.I.; Wan Hasan, W.Z.; Azis, N.; Shafie, S.; Wagatsuma, H. Quadcopter sensing system for risky area. In Proceedings of the IEEE Regional Symposium on Micro and Nanoelectronics (RSM), Batu Ferringhi, Malaysia, 23–25 August 2017; pp. 216–219. [Google Scholar] [CrossRef]
- Saha, H.; Basu, S.; Auddy, S.; Dey, R.; Nandy, A.; Pal, D.; Roy, N.; Jasu, S.; Saha, A.; Chattopadhyay, S.; et al. A low cost fully autonomous GPS (Global Positioning System) based quad copter for disaster management. In Proceedings of the 8th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 8–10 January 2018; pp. 654–660. [Google Scholar] [CrossRef]
- Zhang, X.; Li, X.; Wang, K.; Lu, Y. A Survey of Modelling and Identification of Quadrotor Robot. Abstr. Appl. Anal. 2014, 2014, 320526. [Google Scholar] [CrossRef]
- Chovancová, A.; Fico, T.; Chovanec, Ľ.; Hubinsk, P. Mathematical Modelling and Parameter Identification of Quadrotor (a survey). Procedia Eng. 2014, 96, 172–181. [Google Scholar] [CrossRef] [Green Version]
- Bouabdallah, S.; Noth, A.; Siegwart, R. PID vs LQ control techniques applied to an indoor micro quadrotor. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2451–2456. [Google Scholar] [CrossRef] [Green Version]
- Khuwaja, K.; Tarca, I.C.; Tarca, R.C. PID Controller Tuning Optimization with Genetic Algorithms for a Quadcopter. Recent Innov. Mech. 2018, 5, 1–7. [Google Scholar] [CrossRef]
- Luukkonen, T. Modeling and Control of Quadcopter. Independent Research Project in Applied Mathematics; Aalto University: Espoo, Finland, 2011; Available online: https://sal.aalto.fi/publications/pdf-files/eluu11_public.pdf (accessed on 23 September 2021).
- Hemingway, E.G.; O’Reilly, O.M. Perspectives on Euler angle singularities, gimbal lock, and the orthogonality of applied forces and applied moments. Multibody Syst. Dyn. 2018, 44, 31–56. [Google Scholar] [CrossRef]
- Mascarello, L.N.; Quagliotti, F. Analysis of Safety Requirements for Small Unmanned Aerial Systems (sUAS). In Handbook of Unmanned Aerial Vehicles; Valavanis, K., Vachtsevanos, G., Eds.; Springer: Cham, Switzerland, 2018. [Google Scholar] [CrossRef]
- Cai, G.; Chen, B.M.; Lee, T.H. Unmanned Rotorcraft Systems. In Advances in Industrial Control; Springer: Singapore, 2011. [Google Scholar] [CrossRef]
- Najm, A.A.; Ibraheem, I.K. Nonlinear PID controller design for a 6-DOF UAV quadrotor system. Eng. Sci. Technol. Int. J. 2019, 22, 1087–1097. [Google Scholar] [CrossRef]
- David, H. Quadcopter Dynamic Modeling and Simulation for Control System Design; Drexel University: Philadelphia, PA, USA, 2014; Available online: www.mathworks.com/academia/student-challenge/spring-2014.html (accessed on 25 September 2021).
- Spong, M.W.; Hutchinson, S.; Vidyasagar, M. Robot Modeling and Control. Ind. Robot. 2006, 33, 403. [Google Scholar] [CrossRef] [Green Version]
- Musa, S. Techniques for Quadcopter Modelling & Design: A review. J. Unmanned Syst. Technol. 2017, 5, 66–75. Available online: http://www.ojs.unsysdigital.com/index.php/just/article/view/10.21535%252Fjust.v5i3.981 (accessed on 27 September 2021).
- Cano, J.M. Quadrotor UAV for Wind Profile Characterization. Master’s Thesis, Universidad Carlos III de Madrid, Madrid, Spain, 2013. Available online: https://e-archivo.uc3m.es/bitstream/handle/10016/18105/PFC_Javier_Moyano_Cano.pdf?isAllowed=y&sequence=1 (accessed on 28 September 2021).
- Dikmen, I.C.; Arisoy, A.; Temeltas, H. Attitude control of a quadrotor. In Proceedings of the 2009 4th International Conference on Recent Advances in Space Technologies, Istanbul, Turkey, 11–13 June 2009. [Google Scholar]
- Artale, V.; Milazzo, C.; Ricciardello, A. Mathematical modeling of hexacopter. Appl. Math. Sci. 2013, 7, 4805–4811. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Units |
|---|---|---|
| Absolute linear position of the symmetrical quadrotor defined in the inertial frame | meters (m) | |
| Angular position referenced to the inertial frame | radian (rad) | |
| Linear velocities of the body frame | meter/second (m/s) | |
| Linear velocities of the body expressed in the inertial frame coordinate | meter/second (m/s) | |
| Angular velocities of the body frame | radian/second (rad/s) | |
| Angular velocities of the body frame expressed in the inertial frame | radian/second (rad/s) | |
| Linear acceleration of the body frame expressed in the inertial frame | m/s2 | |
| Angular acceleration of the body frame | rad/s2 | |
| Angular acceleration of the body frame expressed in the inertial frame | rad/s2 |
| Steps | Time (Seconds) | x-Axis (Meter) | y-Axis (Meter) | z-Axis (Meter) | Psi Angle (Degree) |
|---|---|---|---|---|---|
| 1 | 0 | 0 | 0 | 3 | 0 |
| 2 | 5 | 0 | 0 | 3 | 0 |
| 3 | 10 | 20 | 0 | 3 | 0 |
| 4 | 15 | 20 | 5 | 3 | 0 |
| 5 | 20 | 40 | 5 | 3 | 0 |
| 6 | 25 | 60 | 5 | 3 | 0 |
| 7 | 30 | 80 | 10 | 3 | 0 |
| Number | Conventional GA ISE | Adaptive GA ISE |
|---|---|---|
| 1 | 395,87 | 395,87 |
| 2 | 397,198 | 363,929 |
| 3 | 388,363 | 354,026 |
| 4 | 384,874 | 337,825 |
| 5 | 384,803 | 318,168 |
| 6 | 384,490 | 310,480 |
| 7 | 384,106 | 314,313 |
| 8 | 384,106 | 307,316 |
| 9 | 381,619 | 290,028 |
| 10 | 381,625 | 386,261 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Takaoğlu, F.; Alshahrani, A.; Ajlouni, N.; Ajlouni, F.; Al Kasasbah, B.; Özyavaş, A. Robust Nonlinear Non-Referenced Inertial Frame Multi-Stage PID Controller for Symmetrical Structured UAV. Symmetry 2022, 14, 689. https://doi.org/10.3390/sym14040689
Takaoğlu F, Alshahrani A, Ajlouni N, Ajlouni F, Al Kasasbah B, Özyavaş A. Robust Nonlinear Non-Referenced Inertial Frame Multi-Stage PID Controller for Symmetrical Structured UAV. Symmetry. 2022; 14(4):689. https://doi.org/10.3390/sym14040689
Chicago/Turabian StyleTakaoğlu, Faruk, Ali Alshahrani, Naim Ajlouni, Firas Ajlouni, Basil Al Kasasbah, and Adem Özyavaş. 2022. "Robust Nonlinear Non-Referenced Inertial Frame Multi-Stage PID Controller for Symmetrical Structured UAV" Symmetry 14, no. 4: 689. https://doi.org/10.3390/sym14040689