
Recent Synergies of Machine Learning and Neurorobotics: A Bibliometric and Visualized Analysis

Abstract
:1. Introduction
2. Literature Review
3. Dataset and Research Methodology
3.1. Dataset
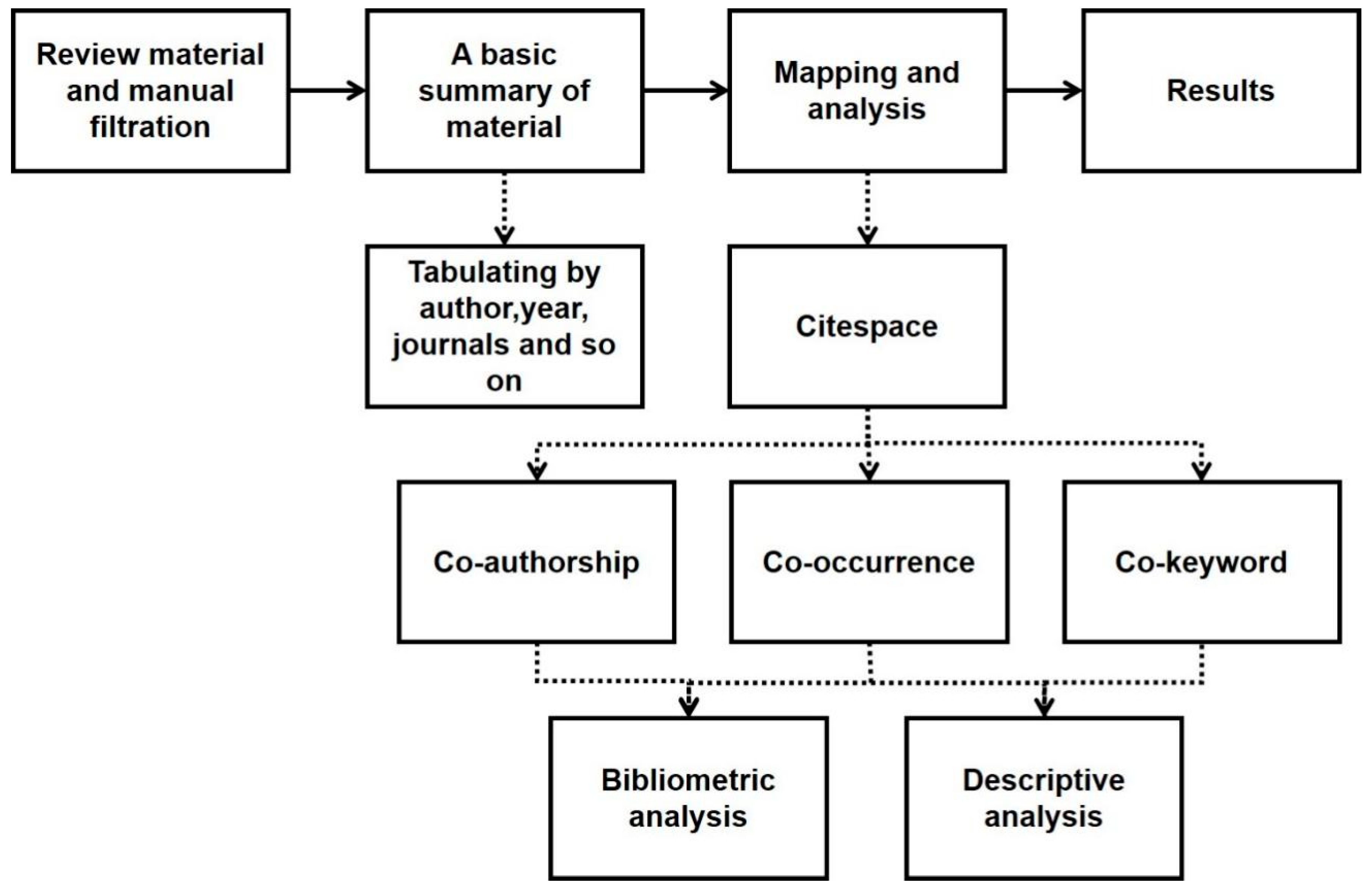
3.2. Research Methodology
3.2.1. Keyword Network Construction
3.2.2. Knowledge Community Division
4. Results
4.1. Publication Trends
4.2. Authors’ Cooperation Network
4.3. Countries and Institutions
4.4. Keyword Analysis
4.5. Content Analysis of Neurorobotics and Machine Learning
5. Discussion and Conclusions
5.1. Discussion
5.2. Implications for Academic Research
5.3. Research Limitation
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kawato, M.; Gomi, H. A computational model of four regions of the cerebellum based on feedback-error learning. Biol. Cybern. 1992, 68, 95–103. [Google Scholar] [CrossRef] [PubMed]
- Miyamoto, H.; Kawato, M.; Setoyama, T.; Suzuki, R. Feedback-error-learning neural network for trajectory control of a robotic manipulator. Neural Netw. 1988, 1, 251–265. [Google Scholar] [CrossRef]
- Hays, J.; Ramamoorthy, S.; Tetzlaff, C. Robust Artificial Intelligence for Neurorobotics. Front. Neurorobotics 2021, 15, 809903. [Google Scholar] [CrossRef] [PubMed]
- Castro, M.C.F.; Pinheiro, W.C.; Rigolin, G. A Hybrid 3D Printed Hand Prosthesis Prototype Based on sEMG and a Fully Embedded Computer Vision System. Front. Neurorobotics 2021, 15, 751282. [Google Scholar] [CrossRef] [PubMed]
- Alsamhi, S.H.; Ma, O.; Ansari, M.S. Survey on artificial intelligence based techniques for emerging robotic communication. Telecommun. Syst. 2019, 72, 483–503. [Google Scholar] [CrossRef]
- Li, P. Research on radar signal recognition based on automatic machine learning. Neural Comput. Appl. 2020, 32, 1959–1969. [Google Scholar] [CrossRef]
- Ge, Z.Q.; Song, Z.H.; Deng, S.X.; Huang, B. Data mining and analytics in the process industry: The role of machine learning. IEEE Access 2017, 5, 20590–20616. [Google Scholar] [CrossRef]
- Chalup, S.K.; Murch, C.L.; Quinlan, M.J. Machine learning with AIBO robots in the four-legged league of RoboCup. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 297–310. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.L.Z.; Hengjinda, P. Applying AI technology to the operation of smart farm robot. Sens. Mater. 2019, 31, 1777–1788. [Google Scholar] [CrossRef]
- Chang, M.; Kim, T.-W.; Beom, J.; Won, S.; Jeon, D. AI therapist realizing expert verbal cues for effective robot-assisted gait training. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 2805–2815. [Google Scholar] [CrossRef]
- Jia, K.; Wang, P.; Li, Y.; Chen, Z.; Jiang, X.; Lin, C.-L.; Chin, T. Research landscape of artificial intelligence and e-learning: A bibliometric research. Front. Psychol. 2022, 13, 795039. [Google Scholar] [CrossRef] [PubMed]
- Suen, H.Y.; Hung, K.E.; Lin, C.L. Intelligent video interview agent used to predict communication skill and perceived personality traits. Hum. Cent. Comput. Inf. Sci. 2020, 10, 3. [Google Scholar] [CrossRef] [Green Version]
- Su, Y.S.; Lin, C.L.; Chen, S.Y.; Lai, C.F. Bibliometric study of social network analysis literature. Libr. Hi Tech 2020, 38, 420–433. [Google Scholar] [CrossRef]
- Cañamero, L.; Lewis, M. Making new “New AI” friends: Designing a social robot for diabetic children from an embodied AI perspective. Int. J. Soc. Robot. 2016, 8, 523–537. [Google Scholar] [CrossRef] [Green Version]
- Vitiello, N.; Lenzi, T.; Roccella, S.; De Rossi, S.M.M.; Cattin, E.; Giovacchini, F.; Vecchi, F.; Carrozza, M.C. NEUROExos: A powered elbow exoskeleton for physical rehabilitation. IEEE Trans. Robot. 2013, 29, 220–235. [Google Scholar] [CrossRef]
- Basílio, M.P.; Pereira, V.; Costa, H.G.; Santos, M.; Ghosh, A. A Systematic Review of the Applications of Multi-Criteria Decision Aid Methods (1977–2022). Electronics 2022, 11, 1720. [Google Scholar] [CrossRef]
- Karbalaei Akbari, M.; Zhuiykov, S. A bioinspired optoelectronically engineered artificial neurorobotics device with sensorimotor functionalities. Nat. Commun. 2019, 10, 3873. [Google Scholar] [CrossRef] [Green Version]
- Nerlekar, V.; Mamtura, T.; Singh, N.; Anand, S.; Parihar, S. Bibliometric analysis on optimal path planning for robots. Libr. Philos. Pract. 2021, 5762. Available online: https://digitalcommons.unl.edu/libphilprac/5762/ (accessed on 7 September 2022).
- Xue, X.; Yang, X.; Deng, Z.; Tu, H.; Kong, D.; Li, N.; Xu, F. Global trends and hotspots in research on rehabilitation robots: A bibliometric analysis from 2010 to 2020. Front. Public Health 2021, 9, 806723. [Google Scholar] [CrossRef]
- Sillet, A. Definition and use of bibliometrics in research. Soins Rev. Ref. Infirmiere 2013, 781, 29–30. [Google Scholar]
- Amirbagheri, K.; Nunez-Carballosa, A.; Guitart-Tarres, L.; Merigo, J.M. Research on green supply chain: A bibliometric analysis. Clean Technol. Environ. Policy 2019, 21, 3–22. [Google Scholar] [CrossRef]
- Liu, B.; Feng, R.; Liu, A.; Dong, L. Science mapping approach to assisting the review of mine water disaster prediction and evaluation in China between 2009 and 2019. IOP Conf. Ser. Earth Environ. Sci. 2020, 446, 052041. [Google Scholar] [CrossRef]
- Pan, X.L.; Yan, E.J.; Cui, M.; Hua, W.N. Examining the usage, citation, and diffusion patterns of bibliometric mapping software: A comparative study of three tools. J. Informetr. 2018, 12, 481–493. [Google Scholar] [CrossRef]
- Xu, Z.; Wang, X.; Wang, X.; Skare, M. A comprehensive bibliometric analysis of entrepreneurship and crisis literature published from 1984 to 2020. J. Bus. Res. 2021, 135, 304–318. [Google Scholar] [CrossRef]
- Koseoglu, M.A.; Rahimi, R.; Okumus, F.; Liu, J. Bibliometric studies in tourism Koseoglu. Ann. Tour. Res. 2016, 61, 180–198. [Google Scholar] [CrossRef]
- Dabbagh, M.; Sookhak, M.; Safa, N.S. The evolution of blockchain: A bibliometric study. IEEE Access 2019, 7, 19212–19221. [Google Scholar] [CrossRef]
- Basilio, M.P.; Pereira, V.; de Oliveira, M.W.C.M.; da Costa, A.F.N.; de Moraes, O.C.R.; Siqueira, S.C.B. Knowledge discovery in research on domestic violence: An overview of the last fifty years. Data Technol. Appl. 2021, 55, 480–510. [Google Scholar] [CrossRef]
- Zhang, D.; Xu, J.P.; Zhang, Y.Z.; Wang, J.; He, S.Y.; Zhou, X. Study on sustainable urbanization literature based on Web of Science, Scopus, and China national knowledge infrastructure: A scientometric analysis in CiteSpace. J. Clean. Prod. 2020, 264, 121537. [Google Scholar] [CrossRef]
- Basilio, M.P.; Pereira, V.; de Oliveira, M.W.C.M. Knowledge discovery in research on policing strategies: An overview of the past fifty years. J. Model. Manag. 2021, in press. [CrossRef]
- Kong, L.Q.; Liu, Z.F.; Wu, J.G. A systematic review of big data-based urban sustainability research: State-of-the-science and future directions. J. Clean. Prod. 2020, 273, 123142. [Google Scholar] [CrossRef]
- Liu, W.S. The data source of this study is Web of Science Core Collection? Not enough. Scientometrics 2019, 121, 1815–1824. [Google Scholar] [CrossRef]
- Wang, Q.; Ngai, E.W.T. Event study methodology in business research: A bibliometric analysis. Ind. Manag. Data Syst. 2020, 120, 1863–1900. [Google Scholar] [CrossRef]
- Bai, Y.; Li, H.X.; Liu, Y. Visualizing research trends and research theme evolution in E535 learning field: 1999–2018. Scientometrics 2021, 126, 1389–1414. [Google Scholar] [CrossRef]
- Wang, Z.H.; Zhao, Y.D.; Wang, B. A bibliometric analysis of climate change adaptation based on massive research literature data. J. Clean. Prod. 2018, 199, 1072–1082. [Google Scholar] [CrossRef]
- Callon, M.; Courtial, J.P.; Turner, W.A.; Bauin, S. From translations to problematic networks: An introduction to co-word analysis. Soc. Sci. Inf. 1983, 22, 191–235. [Google Scholar] [CrossRef]
- Newman, M.; Girvan, M. Finding and evaluating community structure in networks. Phys. Rev. E 2004, 69, 26110–26113. [Google Scholar] [CrossRef] [Green Version]
- Blondel, V.D.; Guillaume, J.L.; Lambiotte, R.; Lefebvre, E. Fast unfolding of communities in large networks. J. Stat. Mech. Theory Exp. 2008, 10, 1008. [Google Scholar] [CrossRef] [Green Version]
- Atzori, M.; Cognolato, M.; Müller, H. Deep learning with convolutional neural networks applied to electromyography data: A resource for the classification of movements for prosthetic hands. Front. Neurorobotics 2016, 10, 9. [Google Scholar] [CrossRef] [Green Version]
- George, T.; Ansari, Y.; Falotico, E.; Laschi, C. Control strategies for soft robotic manipulators: A survey. Soft Robot. 2018, 5, 149–163. [Google Scholar] [CrossRef]
- Sünderhauf, N.; Brock, O.; Scheirer, W.; Hadsell, R.; Fox, D.; Leitner, J.; Corke, P. The limits and potentials of deep learning for robotics. Int. J. Robot. Res. 2018, 37, 405–420. [Google Scholar] [CrossRef] [Green Version]
- Yang, P.C.; Sasaki, K.; Suzuki, K.; Kase, K.; Sugano, S.; Ogata, T. Repeatable folding task by humanoid robot worker using deep learning. IEEE Robot. Autom. Lett. 2017, 2, 397–403. [Google Scholar] [CrossRef]
- Gijsberts, A.; Bohra, R.; Sierra González, D.; Werner, A.; Nowak, M.; Caputo, B.; Roa, M.A.; Castellini, C. Stable myoelectric control of a hand prosthesis using non-linear incremental learning. Front. Neurorobotics 2014, 8, 8. [Google Scholar] [CrossRef] [PubMed]
- Silvera-Tawil, D.; Rye, D.; Velonaki, M. Interpretation of social touch on an artificial arm covered with an EIT-based sensitive skin. Int. J. Soc. Robot. 2014, 6, 489–505. [Google Scholar] [CrossRef]
- Gurău, C.; Rao, D.; Tong, C.H.; Posner, I. Learn from experience: Probabilistic prediction of perception performance to avoid failure. Int. J. Robot. Res. 2018, 37, 981–995. [Google Scholar] [CrossRef]
- Tatsch, C.; Ahmadi, A.; Bottega, F.; Tani, J.; da Silva Guerra, R. Dimitri: An open-source humanoid robot with compliant joint. J. Intell. Robot. Syst. 2018, 91, 291–300. [Google Scholar] [CrossRef]
- Lauretti, C.; Cordella, F.; Ciancio, A.L.; Trigili, E.; Catalan, J.M.; Badesa, F.J.; Zollo, L. Learning by demonstration for motion planning of upper-limb exoskeletons. Front. Neurorobotics 2018, 12, 5. [Google Scholar] [CrossRef] [Green Version]
- Macchini, M.; De Matteïs, L.; Schiano, F.; Floreano, D. Personalized human-swarm interaction through hand motion. IEEE Robot. Autom. Lett. 2021, 6, 8341–8348. [Google Scholar] [CrossRef]
- Chiang, H.T.L.; Hsu, J.; Fiser, M.; Tapia, L.; Faust, A. RL-RRT: Kinodynamic motion planning via learning reachability estimators from RL policies. IEEE Robot. Autom. Lett. 2019, 4, 4298–4305. [Google Scholar] [CrossRef] [Green Version]
- Lippi, V. Prediction in the context of a human-inspired posture control model. Robot. Auton. Syst. 2018, 107, 63–70. [Google Scholar] [CrossRef]
- Jauffret, A.; Cuperlier, N.; Gaussier, P.; Tarroux, P. From self-assessment to frustration, a small step toward autonomy in robotic navigation. Front. Neurorobotics 2013, 7, 16. [Google Scholar] [CrossRef] [Green Version]
- Hinaut, X.; Twiefel, J. Teach Your Robot Your Language! trainable neural parser for modeling human sentence processing: Examples for 15 languages. IEEE Trans. Cogn. Dev. Syst. 2019, 12, 179–188. [Google Scholar] [CrossRef]
- Leonard, B.A.; du Plessis, M.C.; Woodford, G.W. Bootstrapped Neuro-Simulation as a method of concurrent neuro-evolution and damage recovery. Robot. Auton. Syst. 2020, 124, 103398. [Google Scholar] [CrossRef]
- Nagariya, R.; Kumar, D.; Kumar, I. Service supply chain: From bibliometric analysis to content analysis, current research trends and future research directions. Benchmarking 2021, 28, 333–369. [Google Scholar] [CrossRef]
- Lin, C.L.; Chen, Z.; Jiang, X.; Chen, G.L.; Jin, P. Roles and Research Trends of Neuroscience on Major Information Systems Journal: A Bibliometric and Content Analysis. Front. Neurosci. 2022, 16, 872532. [Google Scholar] [CrossRef]
- Sari, Y. Performance evaluation of the various training algorithms and network topologies in a neural-network-based inverse kinematics solution for robots. Int. J. Adv. Robot. Syst. 2014, 11, 64. [Google Scholar] [CrossRef]
- Su, Y.S.; Suen, H.Y.; Hung, K.E. Predicting Behavioral Competencies Automatically from Facial Expressions in Real-time Video-recorded Interviews. J. Real-Time Image Process. 2021, 18, 1011–1021. [Google Scholar] [CrossRef]
- Su, Y.S.; Hu, Y.C. Applying Cloud Computing and Internet of Things Technologies to Develop a Hydrological and Subsidence Monitoring Platform. Sens. Mater. 2022, 34, 1313–1321. [Google Scholar] [CrossRef]
- Polic, M.; Krajacic, I.; Lepora, N.; Orsag, M. Convolutional autoencoder for feature extraction in tactile sensing. IEEE Robot. Autom. Lett. 2019, 4, 3671–3678. [Google Scholar] [CrossRef]
- Thuruthel, T.G.; Falotico, E.; Renda, F.; Laschi, C. Model-Based Reinforcement Learning for Closed-Loop Dynamic Control of Soft Robotic Manipulators. IEEE Trans. Robot. 2019, 35, 124–134. [Google Scholar] [CrossRef]
- Jetchev, N.; Toussaint, M. Fast motion planning from experience: Trajectory prediction for speeding up movement generation. Auton. Robot. 2013, 34, 111–127. [Google Scholar] [CrossRef]
- Bruno, D.; Calinon, S.; Caldwell, D.G. Learning autonomous behaviours for the body of a flexible surgical robot. Auton. Robot. 2017, 41, 333–347. [Google Scholar] [CrossRef] [Green Version]
- Malekzadeh, M.S.; Queißer, J.F.; Steil, J.J. Multi-level control architecture for Bionic Handling Assistant robot augmented by learning from demonstration for apple-picking. Adv. Robot. 2019, 33, 469–485. [Google Scholar] [CrossRef]
- Asgher, U.; Khan, M.J.; Asif Nizami, M.H.; Khalil, K.; Ahmad, R.; Ayaz, Y.; Naseer, N. Motor training using mental workload (MWL) with an assistive soft exoskeleton system: A functional near-infrared spectroscopy (fNIRS) study for brain–machine interface (BMI). Front. Neurorobotics 2021, 15, 605751. [Google Scholar] [CrossRef] [PubMed]
- Gomez-Gonzalez, S.; Neumann, G.; Schölkopf, B.; Peters, J. Adaptation and robust learning of probabilistic movement primitives. IEEE Trans. Robot. 2020, 36, 366–379. [Google Scholar] [CrossRef] [Green Version]
- Laschowski, B.; McNally, W.; Wong, A.; McPhee, J. Environment classification for robotic leg prostheses and exoskeletons using deep convolutional neural networks. Front. Neurorobotics 2022, 15, 730965. [Google Scholar] [CrossRef]
- Morales, R.; Badesa, F.J.; Aracil, N.G.; Aranda, J.; Casals, A. Evaluación en un paciente con ictus en fase crónica de un sistema autoadaptativo de neurorehabilitación robótica. Rev. Iberoam. Automática Inf. Ind. 2015, 12, 92–98. [Google Scholar] [CrossRef] [Green Version]
- Ansari, Y.; Manti, M.; Falotico, E.; Mollard, Y.; Cianchetti, M.; Laschi, C. Towards the development of a soft manipulator as an assistive robot for personal care of elderly people. Int. J. Adv. Robot. Syst. 2017, 14, 1729881416687132. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rank | Journals | Documents | TC | D/TC |
|---|---|---|---|---|
| 1 | IEEE Robotics and Automation Letters | 10 | 183 | 18.30 |
| 2 | Frontiers in Neurorobotics | 7 | 381 | 54.43 |
| 3 | IEEE Transactions on Robotics | 4 | 101 | 25.25 |
| 4 | International Journal of Robotics Research | 3 | 155 | 51.67 |
| 5 | International Journal of Advanced Robotic Systems | 3 | 54 | 18.00 |
| 6 | Soft Robotics | 2 | 200 | 100.00 |
| 7 | Autonomous Robots | 2 | 46 | 23.00 |
| 8 | International Journal of Social Robotics | 1 | 30 | 30.00 |
| 9 | Advanced Robotics | 2 | 18 | 9.00 |
| 10 | Science Robotics | 1 | 10 | 10.00 |
| Rank | Authors | Count | Year |
|---|---|---|---|
| 1 | Egidio Falotico | 5 | 2017 |
| 2 | Cecilia Laschi | 3 | 2017 |
| 3 | Henrik Hautop Lund | 2 | 2019 |
| 4 | Qin Hu | 2 | 2021 |
| 5 | Sylvain Calinon | 2 | 2017 |
| 6 | Silvia Tolu | 2 | 2019 |
| 7 | Sfarokh Atashzar | 2 | 2021 |
| 8 | Paras Gulati | 2 | 2021 |
| 9 | Marie Claire Capolei | 2 | 2019 |
| Rank | Author | Title | Citations |
|---|---|---|---|
| 1 | Zhang et al. [28] | Deep Learning with Convolutional Neural Networks Applied to Electromyography Data: A Resource for the Classification of Movements for Prosthetic Hands | 212 |
| 2 | George et al. [39] | Control Strategies for Soft Robotic Manipulators: A Survey | 185 |
| 3 | Sünderhauf et al. [40] | The limits and Potentials of Deep Learning for Robotics | 130 |
| 4 | Yang et al. [41] | Repeatable Folding Task by Humanoid Robot Worker Using Deep Learning | 80 |
| 5 | Gijsberts et al. [42] | Stable Myoelectric Control of a Hand Prosthesis Using Non-linear Incremental Learning | 70 |
| Rank | Institutions | Count | Year |
|---|---|---|---|
| 1 | Scuola Superiore Sant’Anna | 6 | 2017 |
| 2 | University of Bristol | 2 | 2019 |
| 3 | Technical University of Denmark | 2 | 2019 |
| 4 | Idiap Research Institute | 2 | 2017 |
| 5 | The University of Sydney | 2 | 2013 |
| 6 | New York University | 2 | 2021 |
| 7 | Bielefeld University | 2 | 2019 |
| 8 | DLR-German Aerospace Center | 2 | 2014 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, C.-L.; Zhu, Y.-H.; Cai, W.-H.; Su, Y.-S. Recent Synergies of Machine Learning and Neurorobotics: A Bibliometric and Visualized Analysis. Symmetry 2022, 14, 2264. https://doi.org/10.3390/sym14112264
Lin C-L, Zhu Y-H, Cai W-H, Su Y-S. Recent Synergies of Machine Learning and Neurorobotics: A Bibliometric and Visualized Analysis. Symmetry. 2022; 14(11):2264. https://doi.org/10.3390/sym14112264
Chicago/Turabian StyleLin, Chien-Liang, Yu-Hui Zhu, Wang-Hui Cai, and Yu-Sheng Su. 2022. "Recent Synergies of Machine Learning and Neurorobotics: A Bibliometric and Visualized Analysis" Symmetry 14, no. 11: 2264. https://doi.org/10.3390/sym14112264