
Hermite Cubic Spline Collocation Method for Nonlinear Fractional Differential Equations with Variable-Order


Abstract
:1. Introduction
- A set of nodal basis functions are constructed and the corresponding collocation fractional differentiation matrix is derived for the discretization.
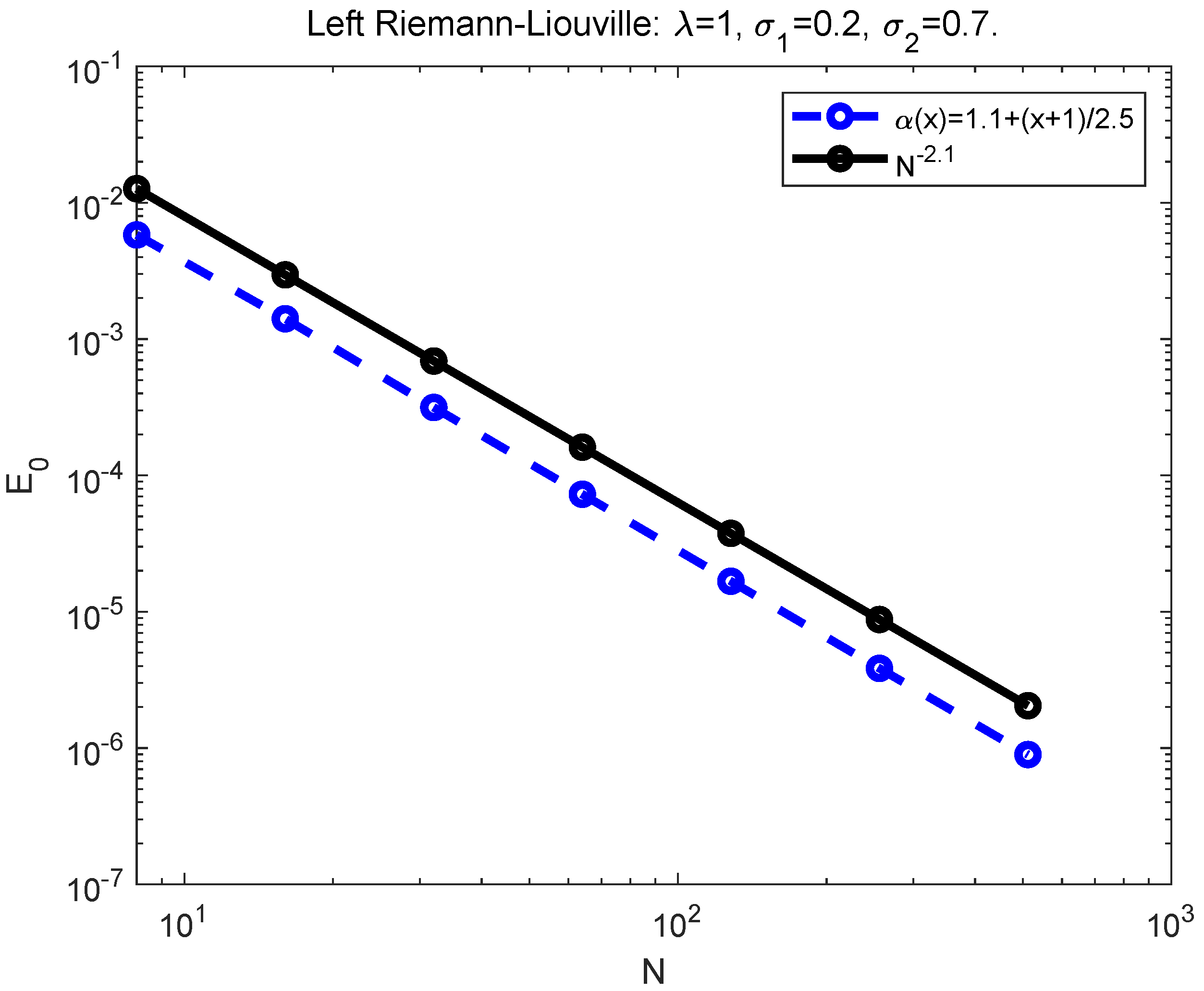
- Making use of the Hermite cubic spline collocation method, numerical solution could be found for variable-order nonlinear fractional differential equations. The order of convergence of the HCSCM is also analysed for the left Riemann-Liouville case.
- The effectiveness of the HCSCM is confirmed by solving fractional Helmholtz equations of constant-order and variable-order. With application the HCSCM to the fractional Burgers equation, the numerical fractional diffusion is simulated with different senses.
2. Preliminaries
3. Hermite Cubic Spline Collocation Method (HCSCM)
3.1. Fractional Differentiation Matrix (FDM) for HCSCM
3.2. Computing the Entries of FDM
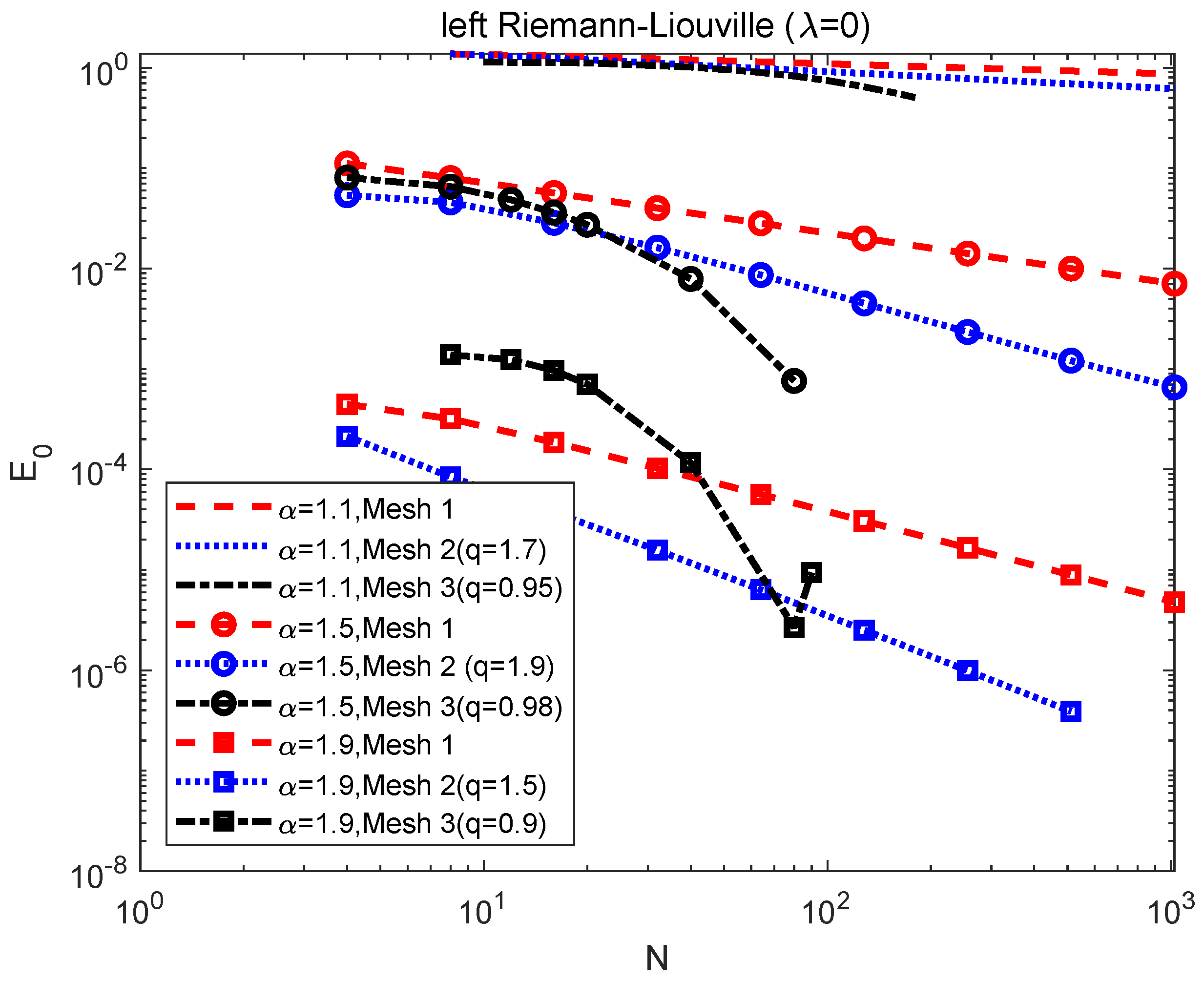
4. Order of Convergence of the Approximation with HCSCM
5. Applications to Fractional Differential Equations
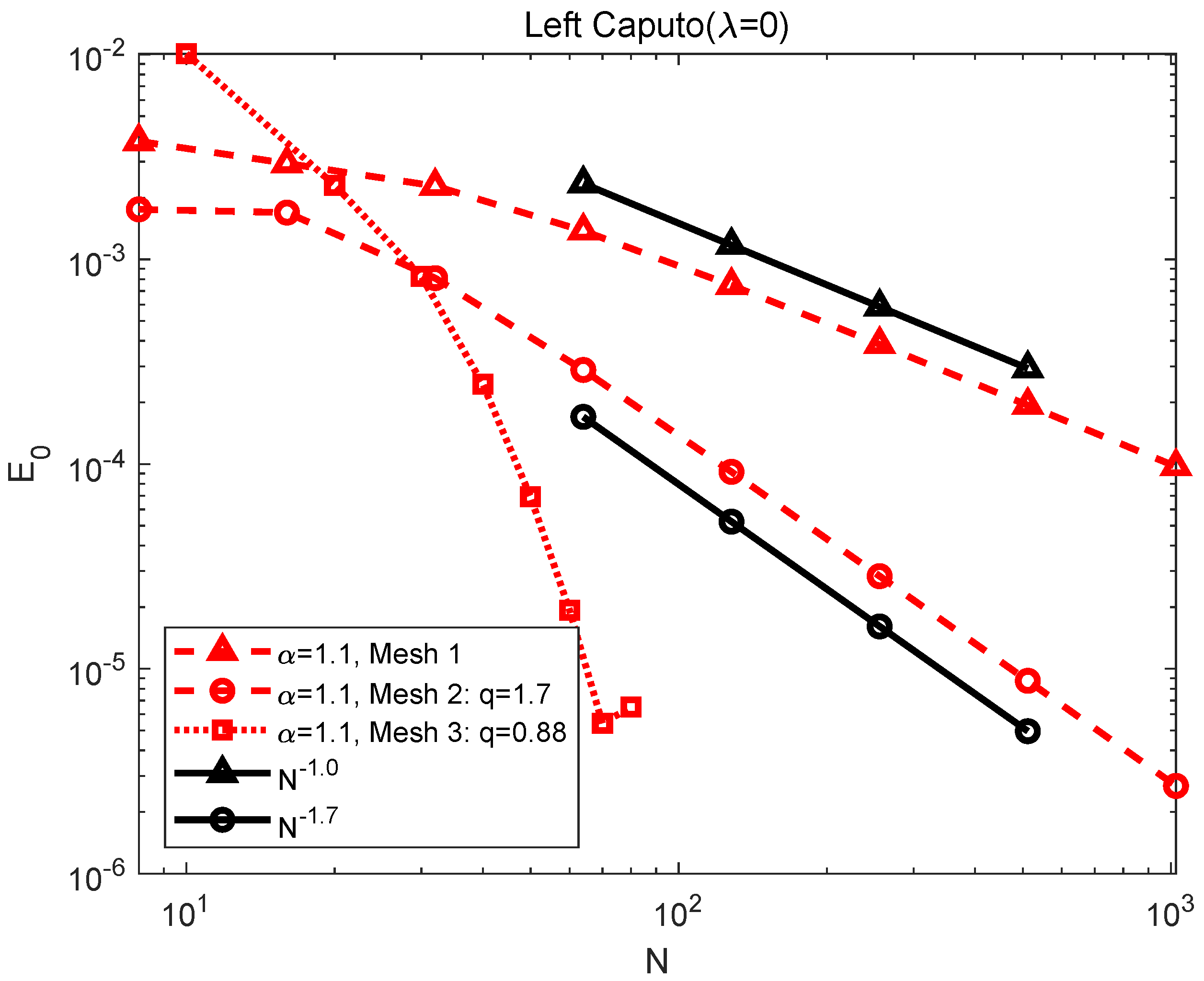
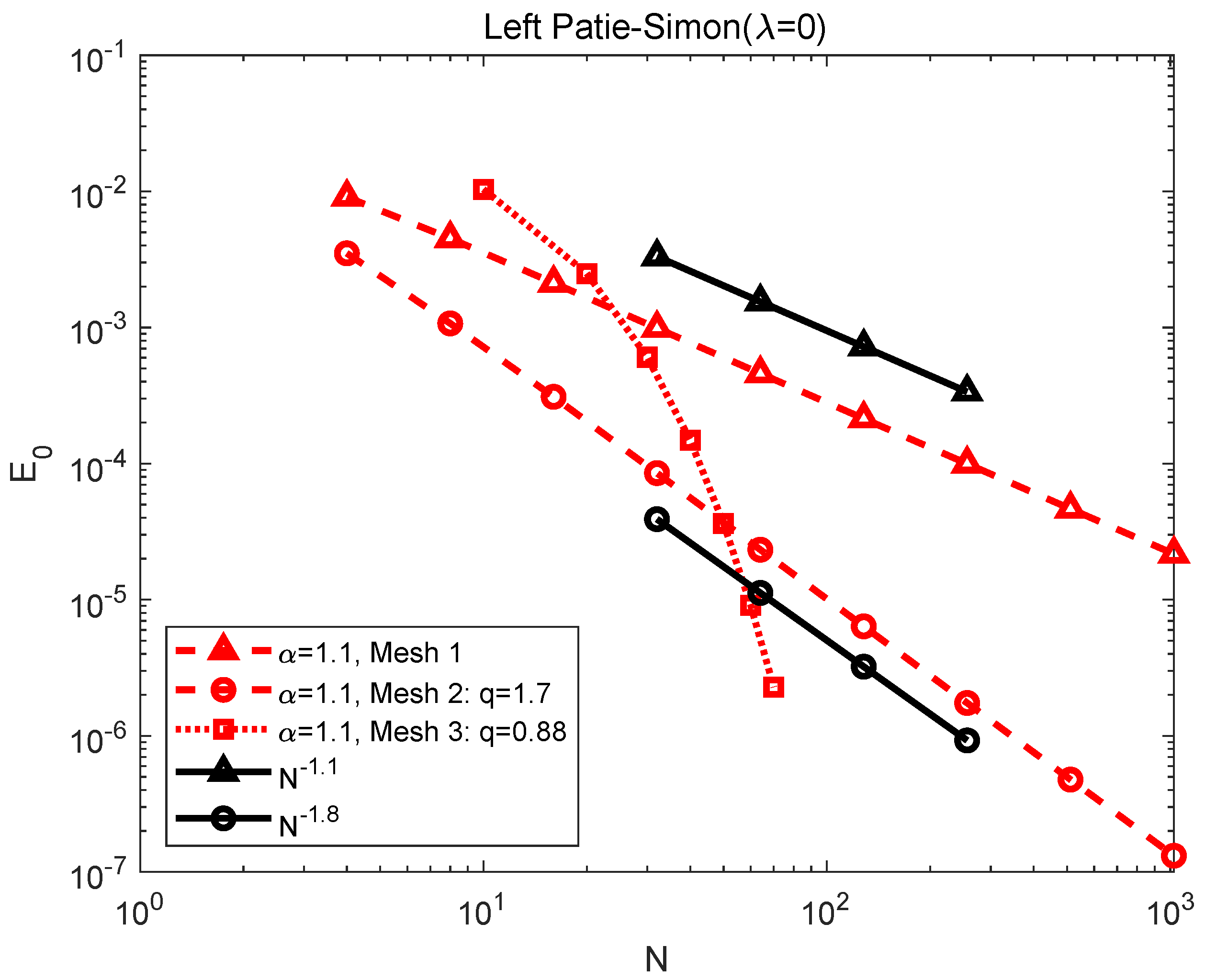
- Uniform mesh (Mesh 1):
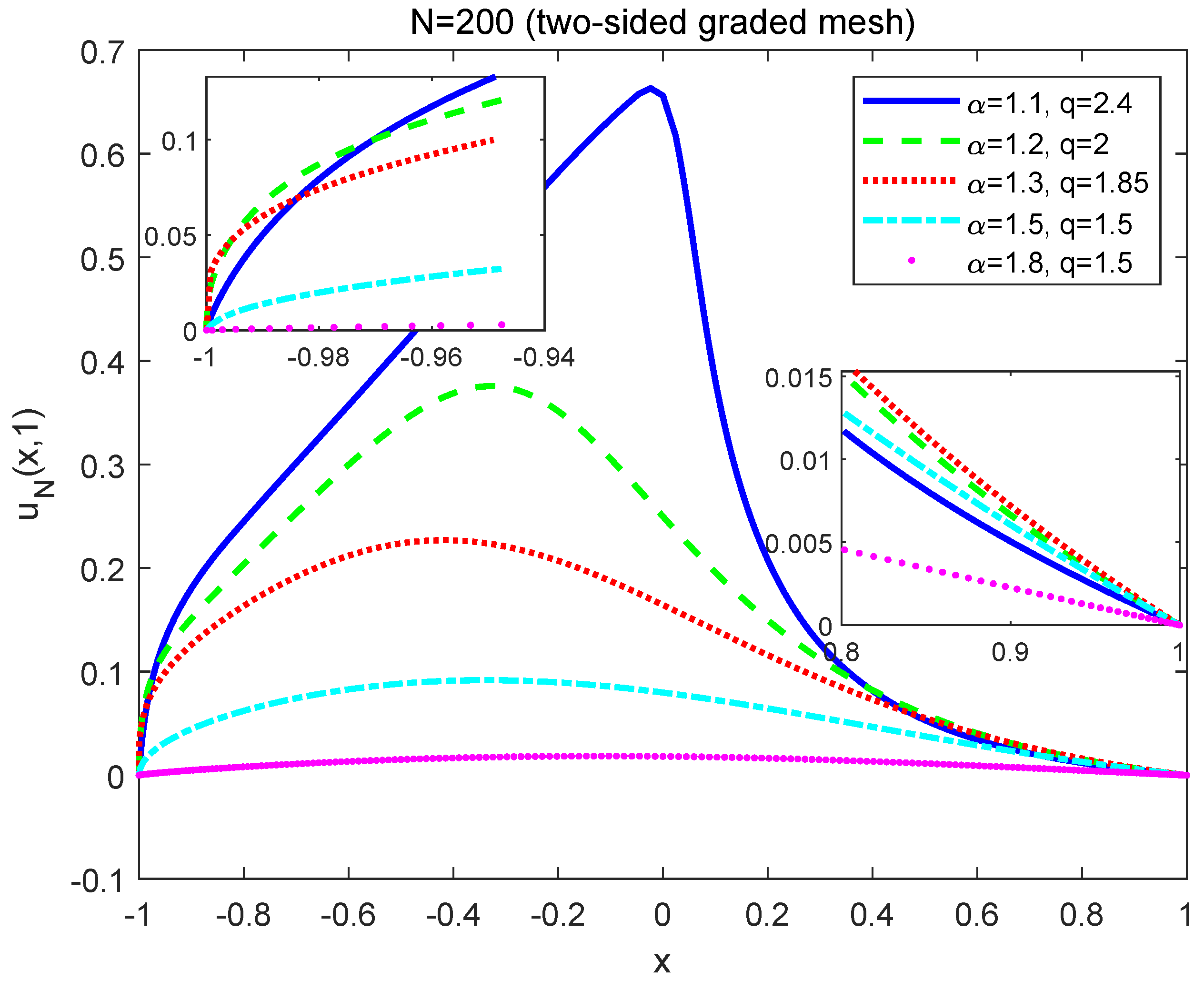
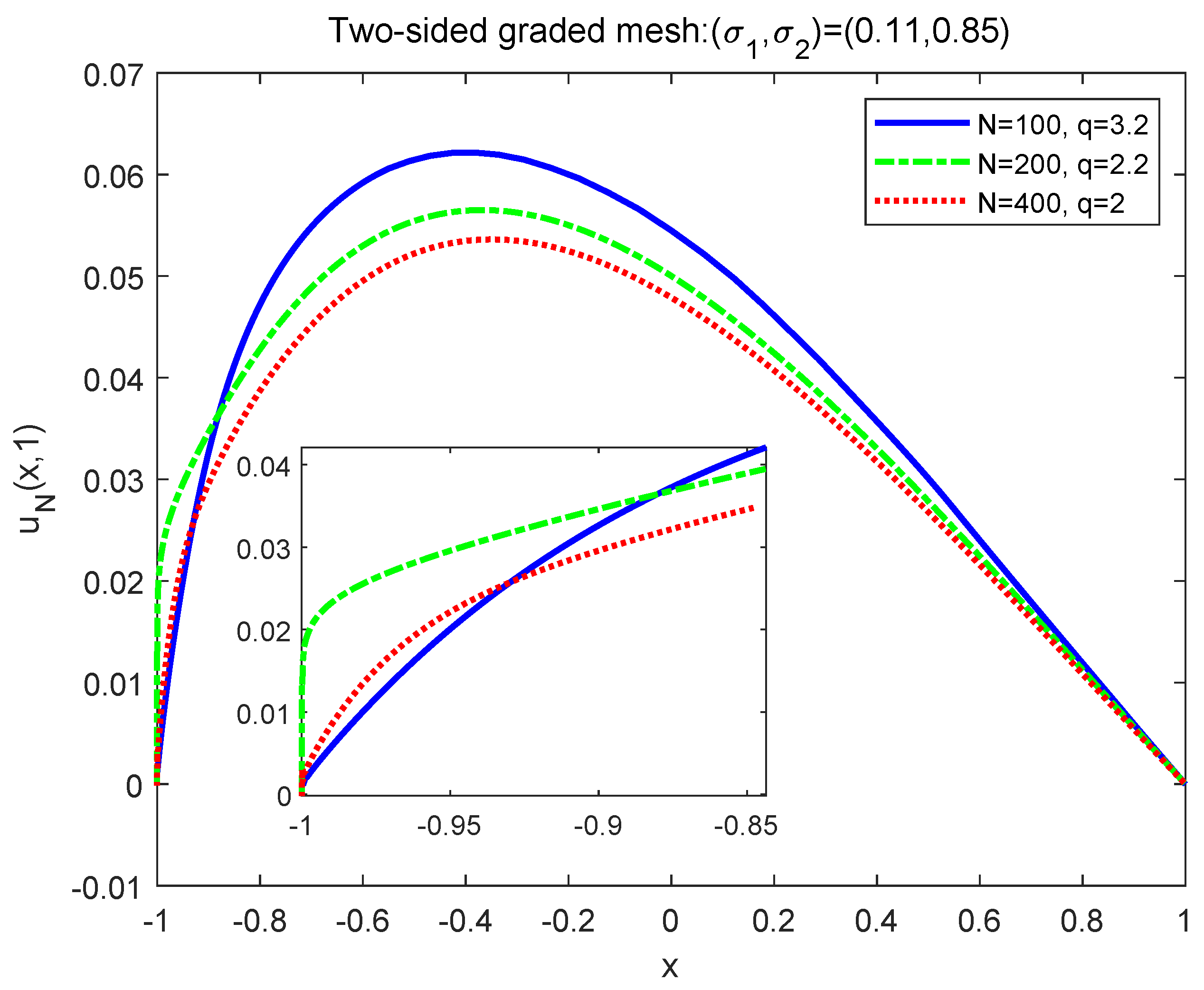
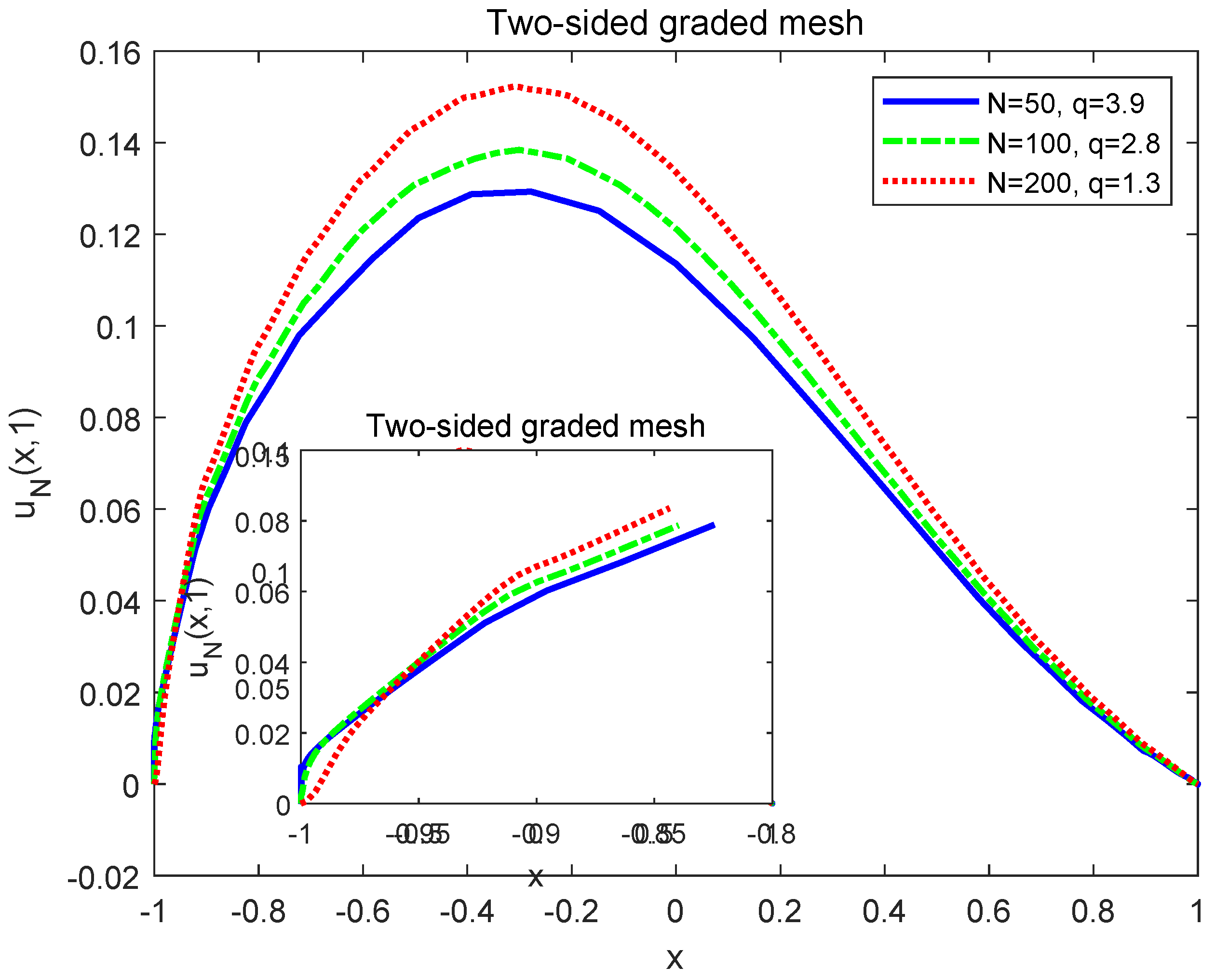
- Graded mesh (Mesh 2):Note: For the two-sided operator, two-sided graded mesh will be used with an even number N:where and when , the two-sided mesh is symmetric.
- Geometric mesh (Mesh 3):
5.1. Fractional Helmholtz Equations
- The constant-order
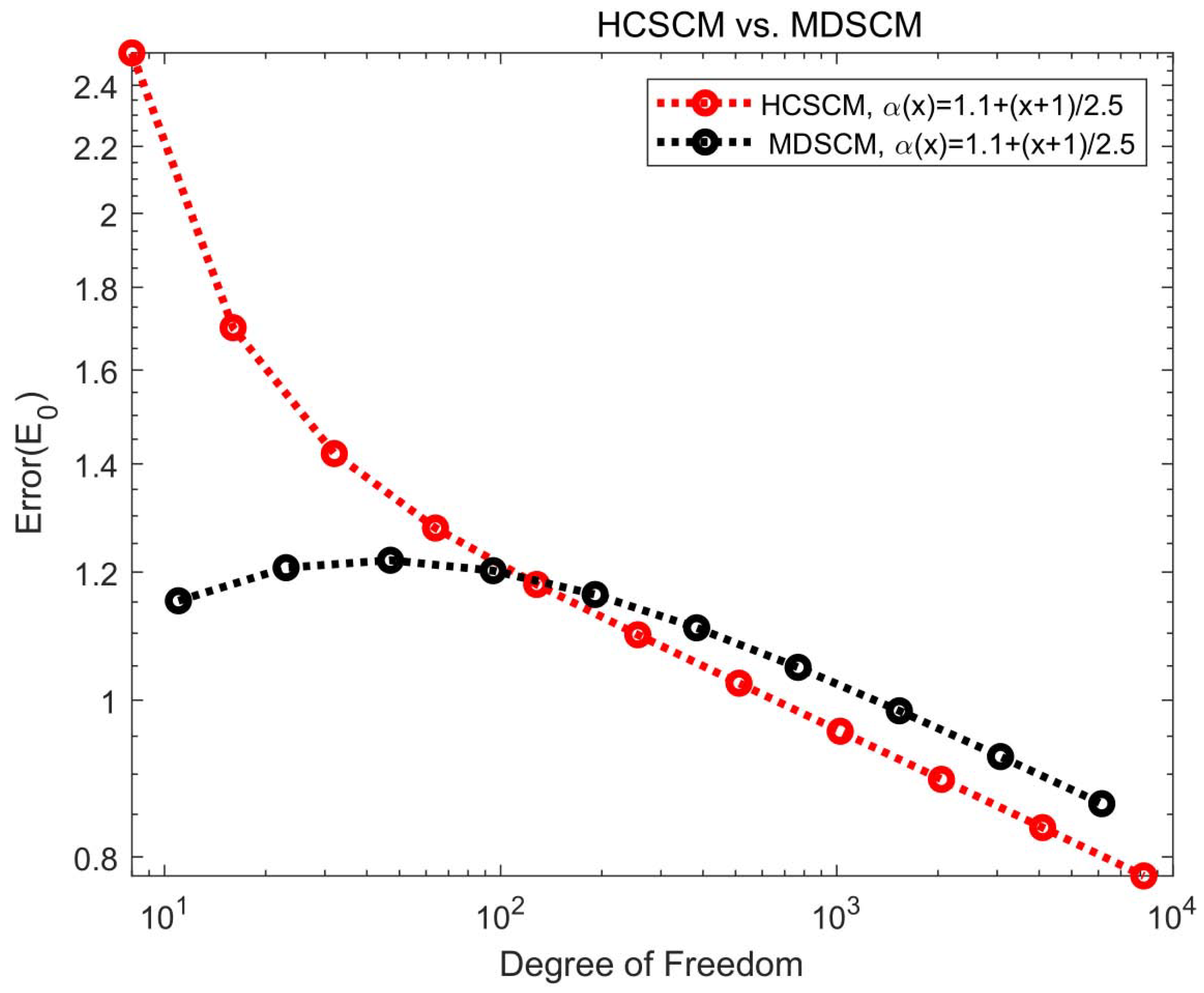
- The variable-order
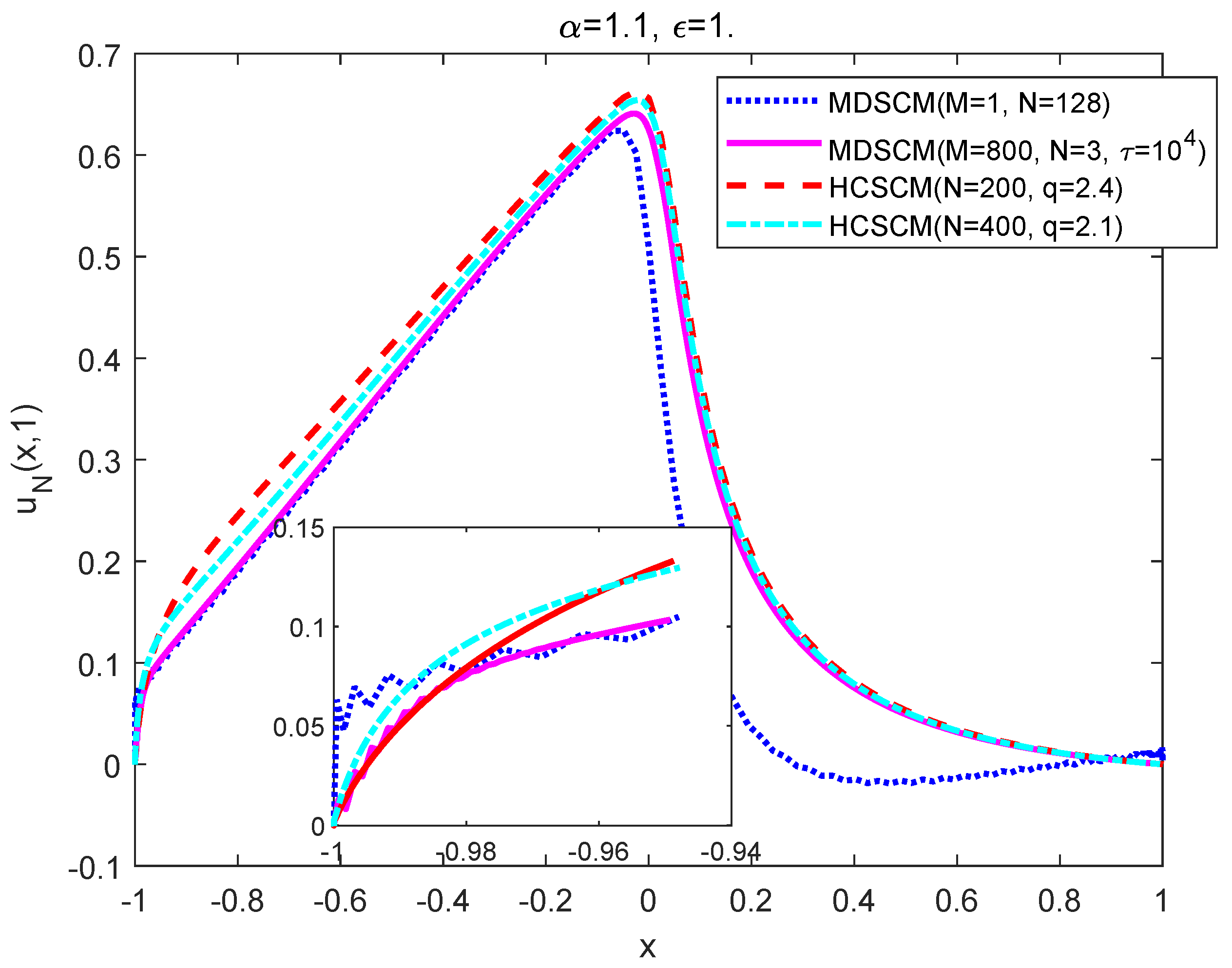
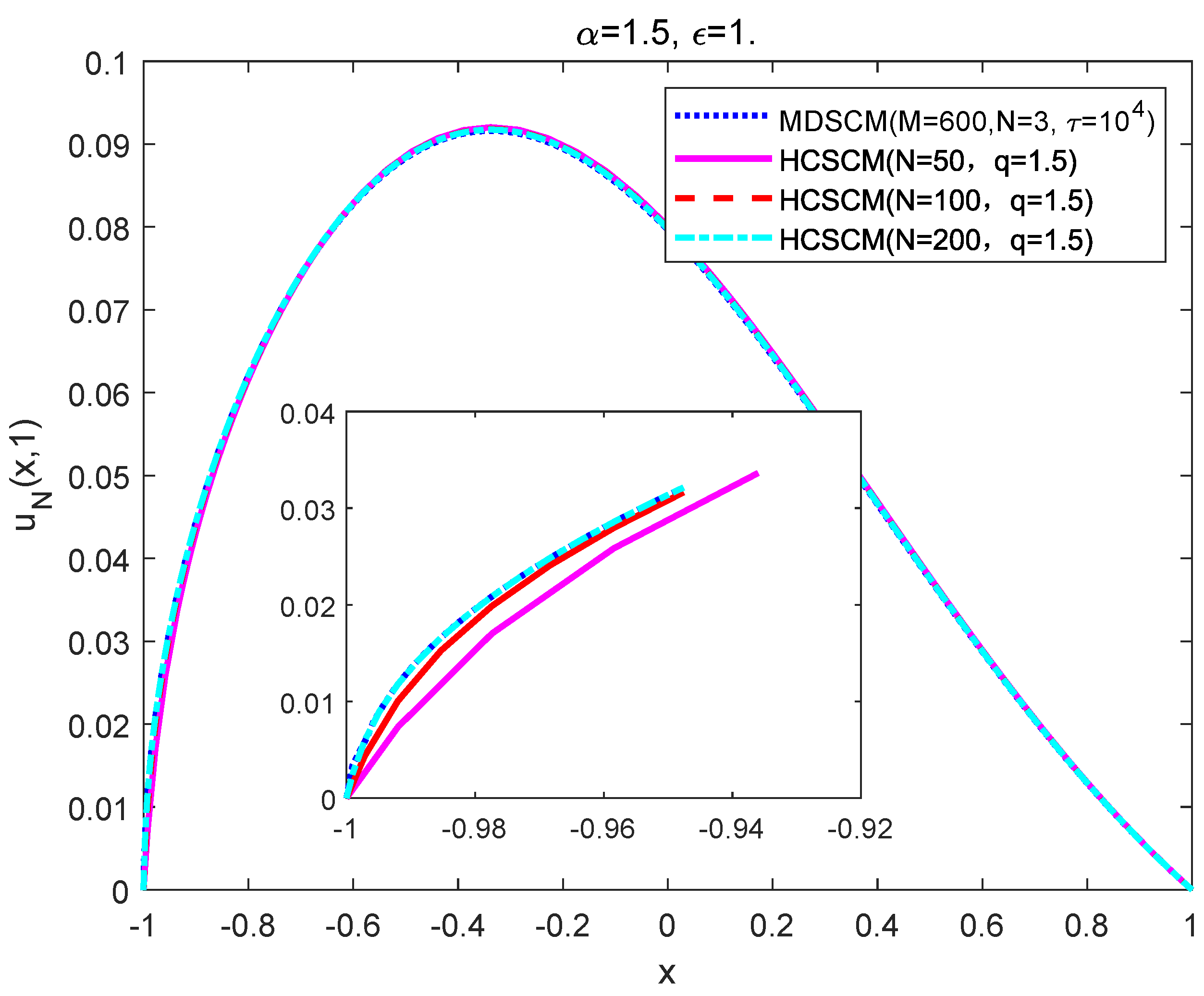
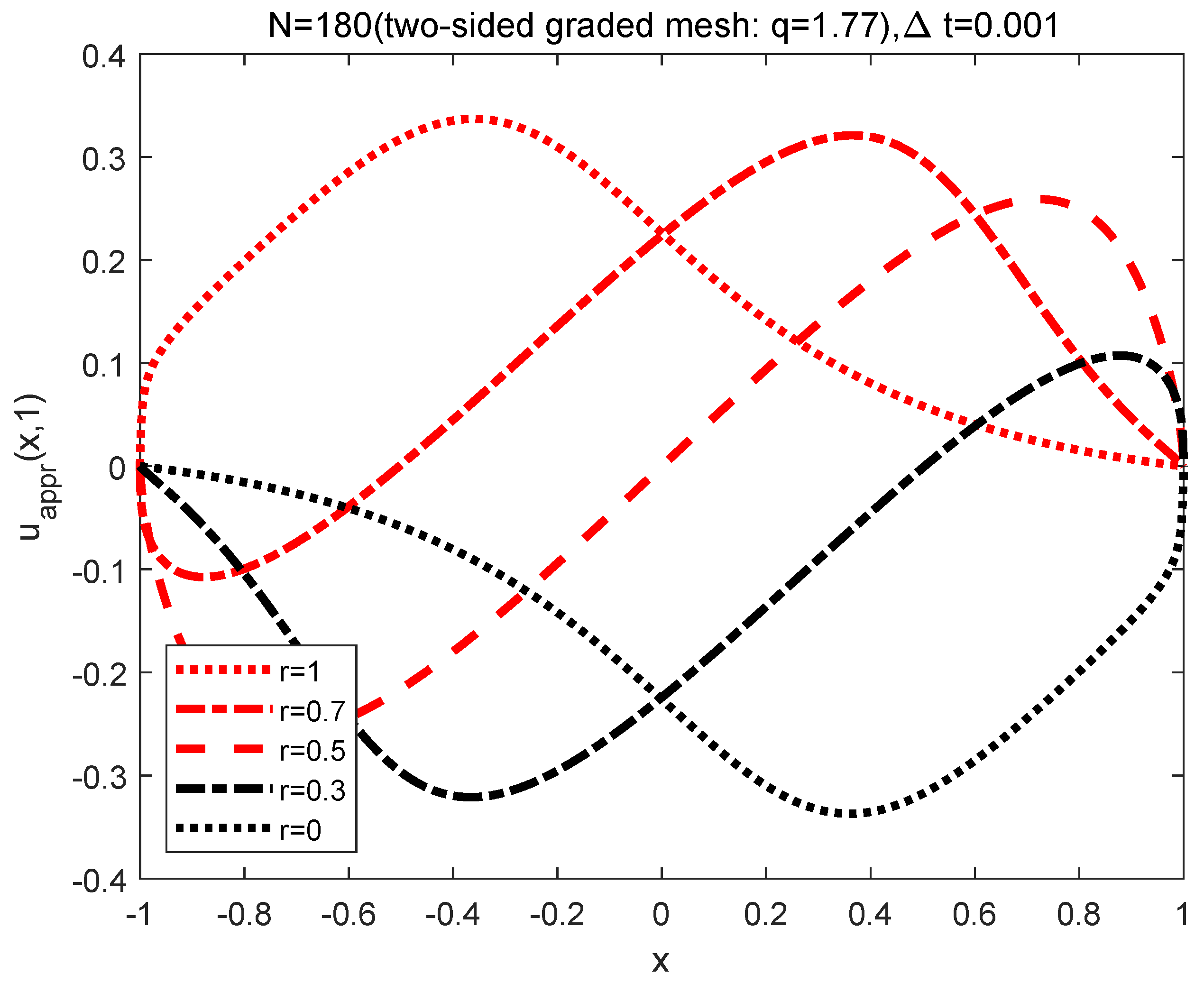
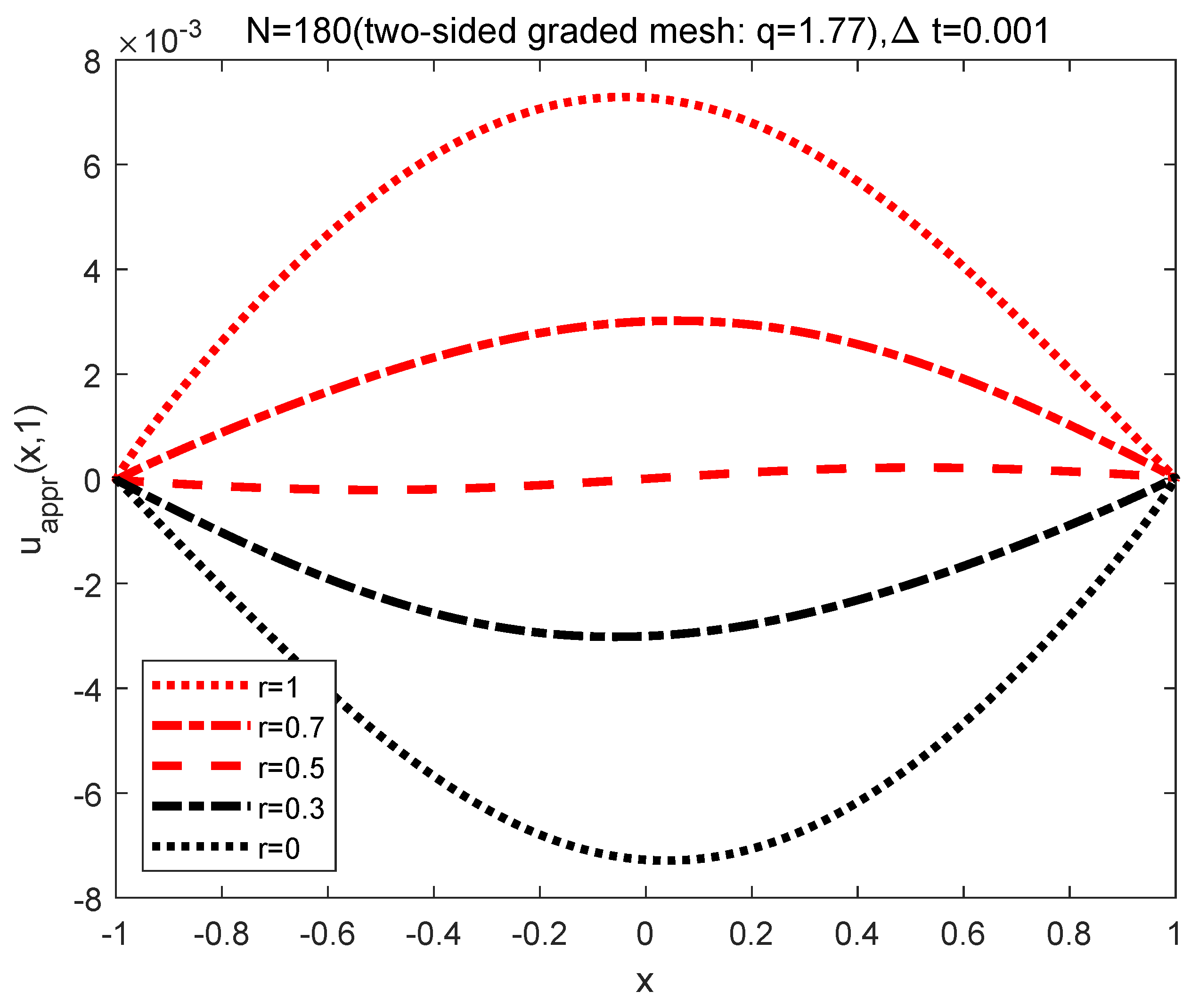
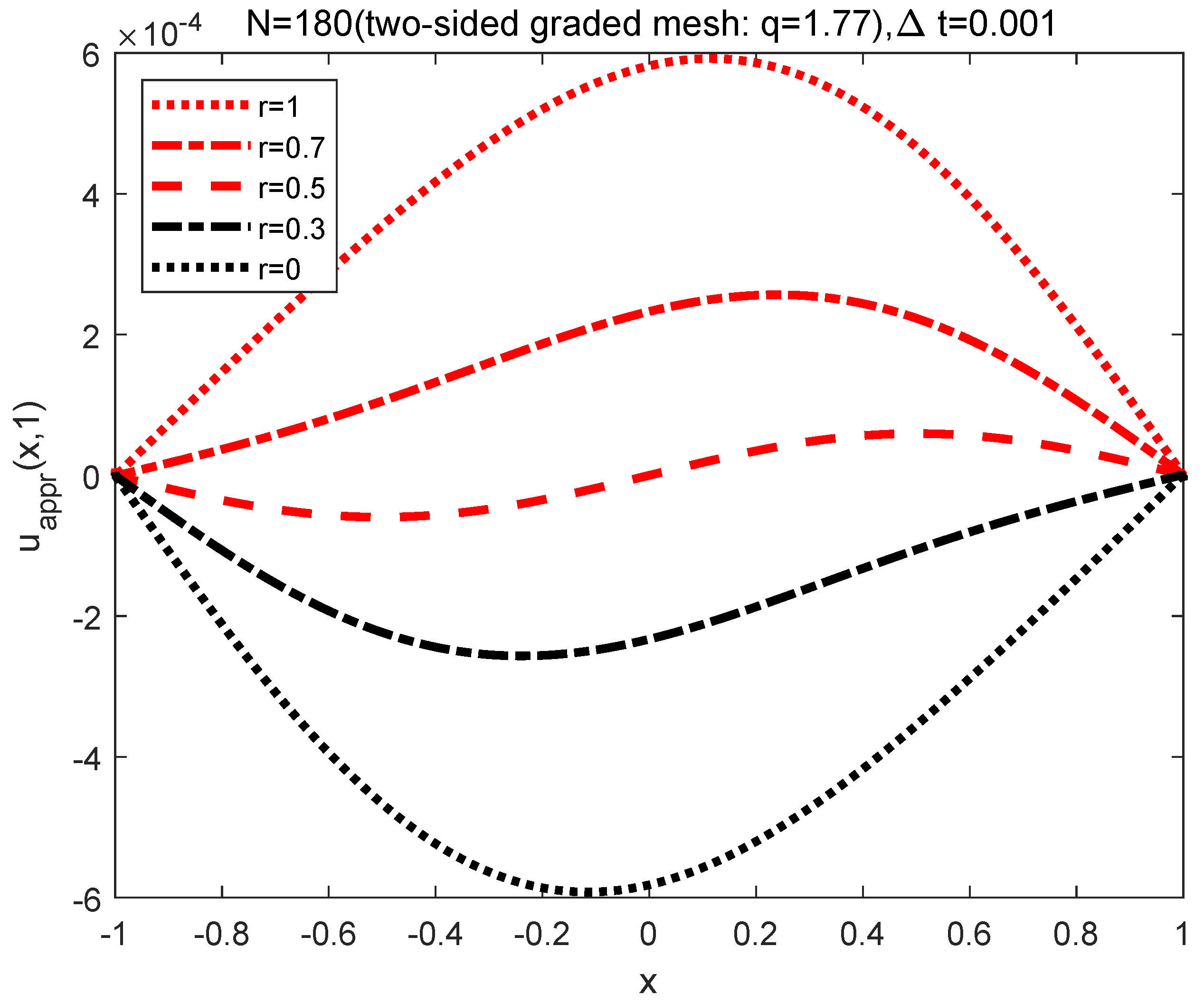
5.2. Fractional Burgers Equations
- Case 1: (constant-order) ;
- Case 2: (monotonic increasing-order) ;
- Case 3: (monotonic decreasing-order) ;
- Case 4: (nonsmooth order) ;
- Case 5: (nonsmooth order) .
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| HCSCM | Hermite cubic spline collocation method |
| FDEs | Fractional differential equations |
| FDM | Fractional differentiation matrix |
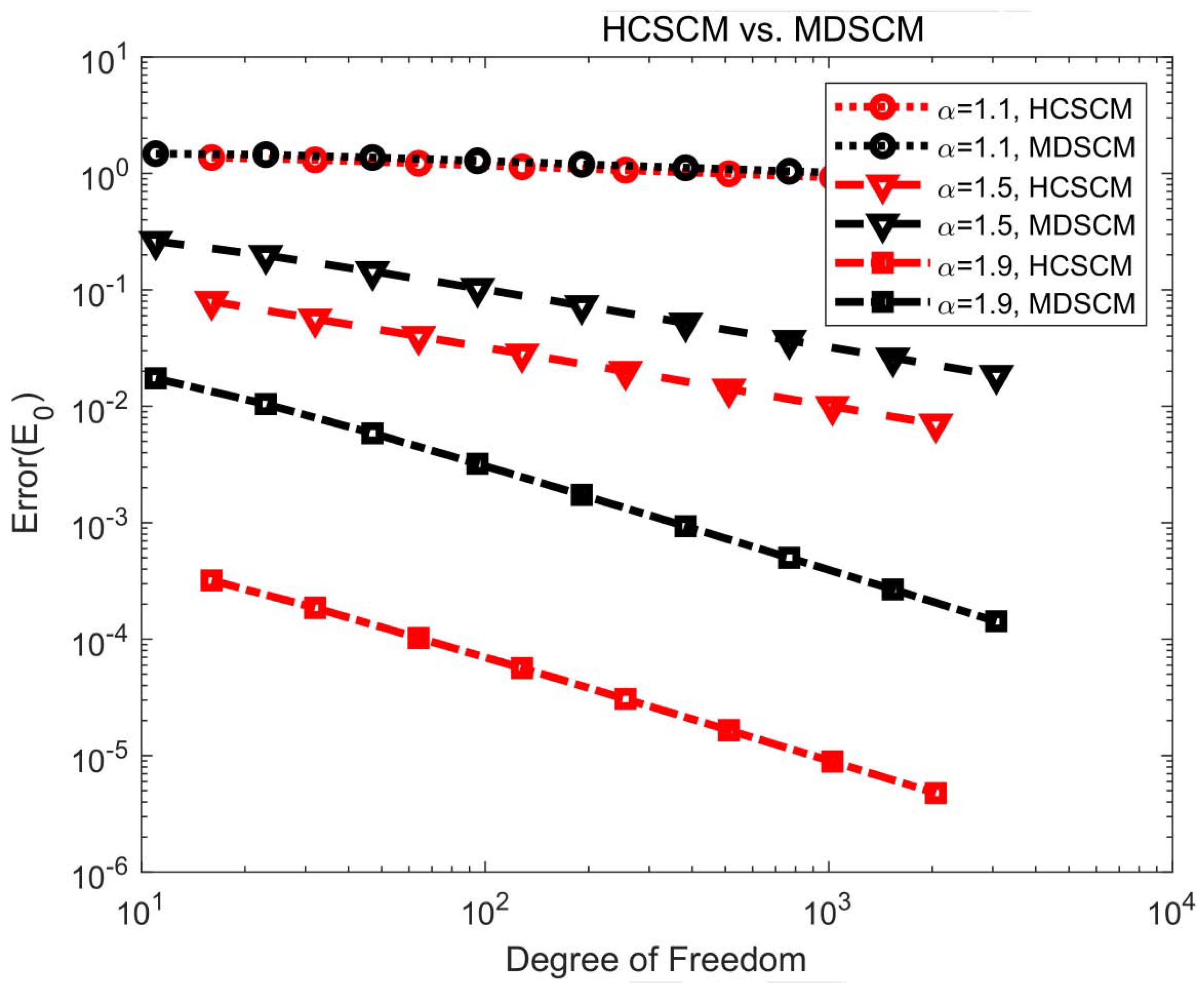
| MDSCM | Multi-domain spectral collocation method |
References
- Metzler, R.; Klafter, J. The restaurant at the end of the random walk: Recent developments in the description of anomalous transport by fractional dynamics. J. Phys. A 2004, 37, 161–208. [Google Scholar] [CrossRef]
- Metzler, R.; Klafter, J. The random walk’s guide to anomalous diffusion: A fractional dynamics approach. Phys. Rep. 2000, 339, 1–77. [Google Scholar] [CrossRef]
- Rossikhin, Y.A.; Shitikova, M.V. Applications of fractional calculus to dynamic problems of linear and nonlinear hereditary mechanics of solids. Appl. Mech. Rev. 1997, 50, 15–67. [Google Scholar] [CrossRef]
- Mainardi, F. Fractional calculus: Some basic problems in continuum and statistical mechanics. In Fractals and Fractional Calculus in Continuum Mechenics; Carpinteri, A., Mainardi, F., Eds.; Springer: New York, NY, USA, 1997; pp. 291–348. [Google Scholar]
- Noeiaghdam, S.; Sidorov, D. Caputo-Fabrizio fractional derivative to solve the fractional model of energy supply-demand system. Math. Model. Eng. Probl. 2020, 7, 359–367. [Google Scholar] [CrossRef]
- Lin, Y.M.; Xu, C.J. Finite difference/spectral approxiamtions for the time-fractional diffusion equation. J. Comput. Phys. 2007, 225, 1533–1552. [Google Scholar] [CrossRef]
- Liu, F.; Anh, V.; Turner, I. Numerical solution of the space fractional Fokker-Planck equation. J. Comput. Appl. Math. 2004, 166, 209–219. [Google Scholar] [CrossRef] [Green Version]
- Meerschaert, M.M.; Scheffler, H.P.; Tadjeran, C. Finite difference methods for two-dimensional fractional dispersion equation. J. Comput. Phys. 2006, 211, 249–261. [Google Scholar] [CrossRef]
- Meerschaert, M.M.; Tadjeran, C. Finite difference approximations for fractional advection-dispersion flow equations. J. Comput. Appl. Math. 2004, 172, 65–77. [Google Scholar] [CrossRef] [Green Version]
- Sun, Z.Z.; Wu, X.N. A fully discrete difference scheme for a diffusion-wave system. Appl. Numer. Math. 2006, 56, 193–209. [Google Scholar] [CrossRef]
- Tadjeran, C.; Meerschaert, M.M.; Scheffler, H.P. A second-order accurate numerical approximation for the fractional diffusion equation. J. Comput. Phys. 2006, 213, 205–213. [Google Scholar] [CrossRef]
- Tadjeran, C.; Meerschaert, M.M. A second-order accurate numerical method for the two-dimensional fractional diffusion equation. J. Comput. Phys. 2007, 220, 813–823. [Google Scholar] [CrossRef]
- Wang, H.; Basu, T.S. A fast finite difference method for two-dimensional space-fractional diffusion equation. SIAM J. Sci. Comput. 2012, 34, 2444–2458. [Google Scholar] [CrossRef]
- Wang, H.; Wang, K. An O(Nlog2N) alternating-direction finite difference method for two-dimensional fractional diffusion equation. J. Comput. Phys. 2011, 230, 7830–7839. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, Z.Z.; Wu, H.W. Error estimates of Crank-Nicolson type difference schemes for the sub-diffusion eqution. SIAM J. Numer. Anal. 2011, 49, 2302–2322. [Google Scholar] [CrossRef]
- Zhou, H.; Tian, W.Y.; Deng, W.H. Quasi-compact finite difference schemes for space fractional diffusion equations. J. Sci. Comput. 2013, 56, 45–66. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Sun, Z.Z.; Hao, Z.P. A fourth-order compact ADI scheme for two-dimensional nonlinear space fractional Schrödinger equation. SIAM J. Sci. Comput. 2014, 36, A2865–A2886. [Google Scholar] [CrossRef]
- Deng, W.H. Finite element method for the space and time fractional Fokker-Planck equation. SIAM J. Numer. Anal. 2008, 47, 204–226. [Google Scholar] [CrossRef]
- Ford, N.; Xiao, J.Y.; Yan, Y.B. A finite element method for time fractional partial differential equations. Fract. Calc. Appl. Anal. 2011, 14, 454–474. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Ma, J. High-order finite element methods for time-fractional partial differential equations. J. Comput. Appl. Math. 2011, 235, 3285–3290. [Google Scholar] [CrossRef] [Green Version]
- Lian, Y.; Ying, Y.; Tang, S.; Lin, S.; Wagner, G.J.; Liu, W.K. A Petrev-Galerkin finite element method for the fractional advection-diffusion equation. Comput. Methods Appl. Mech. Engrg. 2016, 309, 388–410. [Google Scholar] [CrossRef]
- Wang, H.; Yang, D.P.; Zhu, S.F. A Petrev-Galerkin finite element method for variable-coefficient fractional diffusion equations. Comput. Methods Appl. Mech. Engrg. 2015, 290, 45–56. [Google Scholar] [CrossRef]
- Zheng, Y.Y.; Li, C.P.; Zhao, Z.G. A note on the finite element method for the space-fractional advection diffusion equation. Comput. Math. Appl. 2010, 59, 1718–1726. [Google Scholar] [CrossRef] [Green Version]
- Li, C.P.; Zeng, F.H.; Liu, F. Spectral approximations to the fractional integral and derivative. Fract. Calc. Appl. Anal. 2012, 15, 383–406. [Google Scholar] [CrossRef] [Green Version]
- Li, X.J.; Xu, C.J. A space-time spectral method for the time fractional diffusion equations. SIAM J. Numer. Anal. 2009, 47, 2018–2131. [Google Scholar] [CrossRef]
- Li, X.J.; Xu, C.J. Existence and uniqueness of the weak solution of the space-time fractional diffusion equation and a spectral method approximation. Commun. Comput. Phys. 2010, 8, 1016–1051. [Google Scholar]
- Tian, W.Y.; Deng, W.H.; Wu, Y.J. Polynomial spectral collocation method for space fractional advection-diffusion equation. Numer. Methods Partial Differ. Eq. 2014, 30, 514–535. [Google Scholar] [CrossRef] [Green Version]
- Xu, Q.W.; Hesthaven, J.S. Stable multi-domian spectral penalty methods for fractional partial differential equations. J. Comput. Phys. 2014, 257, 241–258. [Google Scholar] [CrossRef] [Green Version]
- Mao, Z.P.; Chen, S.; Shen, J. Efficient and accurate spectral method using generalized Jacobi functions for solving Riesz fractional differential equations. Appl. Numer. Math. 2016, 106, 165–181. [Google Scholar] [CrossRef]
- Mao, Z.P.; Shen, J. Efficient spectral-Galerkin methods for fractional partial differential equations with variable coefficients. J. Comput. Phys. 2016, 307, 243–261. [Google Scholar] [CrossRef] [Green Version]
- Zeng, F.H.; Liu, F.W.; Li, C.P.; Burrage, K.; Turner, I.; Anh, V. A Crank-Nicolson ADI spectral method for a two-dimensional Riesz space fractional nonlinear reaction-diffusion equation. SIAM J. Numer. Anal. 2014, 52, 2599–2622. [Google Scholar] [CrossRef] [Green Version]
- Zayernouri, M.; Karniadakis, G.E. Discontinuous spectral element methods for time- and space-fractional advection equations. SIAM J. Sci. Comput. 2014, 36, B684–B707. [Google Scholar] [CrossRef]
- Kharazmi, E.; Zayernouri, M.; Karniadakis, G.E. A Petrov-Galerkin spectral element method for fractional elliptic problems. Comput. Methods Appl. Mech. Engrg. 2017, 324, 512–536. [Google Scholar] [CrossRef] [Green Version]
- Li, C.P.; Cai, M. Theory and Numerical Approximations of Fractional Integrals and Derivatives; SIAM: Philadelphia, PA, USA, 2020. [Google Scholar]
- Shen, J.; Tang, T.; Wang, L.L. Spectral Methods: Algorithms, Analysis and Applications; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Guo, B.Y. The Spectral Methods and Its Applications; World Scientific: Singapore, 1998. [Google Scholar]
- Bernardi, C.; Maday, Y. Spectral methods. In Handbook of Numerical Analysis, Vol. V, Techniques of Scientific Computing (Part 2); Ciarlet, P.G., Lions, J.L., Eds.; Elsevier: Amsterdam, The Netherlands, 1997; pp. 209–486. [Google Scholar]
- Boyd, J.P. Chebyshev and Fourier Spectral Methods, 2nd ed.; Dover Publication: Mineola, NY, USA, 2000. [Google Scholar]
- Chen, S.; Shen, J.; Wang, L.L. Generalized Jacobi functions and their applications to fractional differential equations. Math. Comput. 2016, 85, 1603–1638. [Google Scholar] [CrossRef] [Green Version]
- Zeng, F.H.; Zhang, Z.Q.; Karniadakis, G.E. A generalized spectral collocation method with tunable accuracy for variable-order fractional differential equations. SIAM J. Sci. Comput. 2015, 37, A2710–A2732. [Google Scholar] [CrossRef]
- Zeng, F.H.; Mao, Z.P.; Karniadakis, G.E. A generalized spectral collocation method with tunable accuracy for fractional differential equations with end-point singularities. SIAM J. Sci. Comput. 2017, 39, A360–A383. [Google Scholar] [CrossRef] [Green Version]
- Mao, Z.P.; Karniadakis, G.E. A spectral method (of exponential convergence) for singular solutions of the diffusion equation with general two-sided fractional derivative. SIAM J. Numer. Anal. 2018, 56, 24–49. [Google Scholar] [CrossRef]
- Zayernouri, M.; Karniadakis, G.E. Fractional Sturm-Liouville eigenproblems: Theory and numerical approximation. J. Comput. Phys. 2013, 252, 495–517. [Google Scholar] [CrossRef]
- Zayernouri, M.; Karnidakis, G.E. Fractional spectral collocation method. SIAM J. Sci. Comput. 2014, 36, A40–A62. [Google Scholar] [CrossRef]
- Zayernouri, M.; Karnidakis, G.E. Fractional spectral collocation methods for linear and nonlinar variable order FPDEs. J. Comput. Phys. 2015, 293, 312–338. [Google Scholar] [CrossRef] [Green Version]
- Huang, C.; Jiao, Y.J.; Wang, L.L.; Zhang, Z.M. Optimal fractional integration preconditioning and error analysis of fractional collocation method using nodal generalised Jacobi functions. SIAM J. Numer. Anal. 2016, 54, 3357–3387. [Google Scholar] [CrossRef]
- Jiao, Y.J.; Wang, L.L.; Huang, C. Well-conditioned fractional collocation methods using fractional Birkhoff interpolation basis. J. Comput. Phys. 2016, 305, 1–28. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.Q.; Zeng, F.H.; Karniadakis, G.E. Optimal error estimates of spectral petrov-Galerkin and collocation methods for initial value problems of fractional differential equations. SIAM J. Numer. Anal. 2015, 53, 2074–2096. [Google Scholar] [CrossRef]
- Zhao, T.G.; Mao, Z.P.; Karniadakis, G.E. Multi-domain spectral collocation method for variable-order nonlinear fractional differential equations. Comput. Methods Appl. Mech. Engrg. 2019, 348, 377–395. [Google Scholar] [CrossRef] [Green Version]
- Bialecki, B.; Fairweather, G. Orthogonal spline collocation methods for partial differential equations. J. Comput. Appl. Math. 2001, 128, 55–82. [Google Scholar] [CrossRef] [Green Version]
- Douglas, J., Jr.; Dupont, T. Collocation methods for parabolic equations in a single space variable. In Lecture Notes in Mathematics; Springer: New York, NY, USA, 1974; Volume 385. [Google Scholar]
- Greenwell-Yanik, C.E.; Fairweather, G. Analyses of spline collocation methods for parabolic and hyperbolic problems in two space variables. SIAM J. Numer. Anal. 1986, 23, 282–296. [Google Scholar] [CrossRef]
- Liu, J.; Fu, H.F.; Chai, X.C.; Sun, Y.N.; Guo, H. Stability and convergence analysis of the quadratic spline collocation method for time-dependent fractional diffusion equations. Appl. Math. Comput. 2019, 346, 633–648. [Google Scholar] [CrossRef]
- Majeed, A.; Kamran, M.; Iqbal, M.K.; Baleanu, D. Solving time fractional Burgers’ and Fisher’s equations using cubic B-spline approximation method. Adv. Diff. Equ. 2020, 2020, 175. [Google Scholar] [CrossRef]
- Khalid, N.; Abbas, M.; Iqbal, M.K. Non-polynomial quintic spline for solving fourth-order fractional boundary value problems involving product terms. Appl. Math. Comput. 2019, 349, 393–407. [Google Scholar] [CrossRef]
- Emadifar, H.; Jalilian, R. An exponential spline approximation for fractional Bagley-Torvik equation. Bound. Value Probl. 2020, 2020, 20. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations; Elsevier Science: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and some of Their Applications; Mathematics in Science and Engineering; Academic Press: San Diego, CA, USA, 1999; Volume 198. [Google Scholar]
- Patie, P.; Simon, T. Intertwining certain fractional derivatives. Potential Anal. 2012, 36, 569–587. [Google Scholar] [CrossRef] [Green Version]
- Sun, W. The spectral analysis of Hermite cubic spline collocation systems. SIAM J. Numer. Anal. 1999, 36, 1962–1975. [Google Scholar] [CrossRef]
- Sun, W. Hermite cubic spline collocation method with upwind features. ANZIAM J. 2000, 42, C1379–C1397. [Google Scholar] [CrossRef] [Green Version]
- Varma, A.K.; Howell, G. Best error bounds for derivatives in two point Birkhoff interpolation problems. J. Approx. Theory 1983, 38, 258–268. [Google Scholar] [CrossRef] [Green Version]
- Birkhoff, G.; Schultz, M.H.; Varga, R.S. Piecewise Hermite interpolation in one and two variables with applications to partial differential equations. Numer. Math. 1968, 11, 232–256. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | OC | OC | OC | OC | ||||
|---|---|---|---|---|---|---|---|---|
| 20 | 1.1797 | - | 1.1326 | - | 1.8116 | - | 2.9010 | - |
| 40 | 1.6776 | 2.81 | 1.7641 | 2.68 | 3.3277 | 2.45 | 6.2240 | 2.22 |
| 80 | 2.4257 | 2.79 | 2.8890 | 2.61 | 6.2306 | 2.42 | 1.3406 | 2.22 |
| 120 | 7.8179 | 2.79 | 1.0058 | 2.60 | 2.3442 | 2.41 | 5.4714 | 2.21 |
| 160 | 3.5026 | 2.79 | 4.7588 | 2.60 | 1.1740 | 2.40 | 2.8984 | 2.21 |
| 200 | 1.8588 | 2.84 | 2.6617 | 2.60 | 6.8516 | 2.41 | 1.7712 | 2.21 |
| 240 | 1.1199 | 2.78 | 1.6566 | 2.60 | 4.4209 | 2.40 | 1.1876 | 2.19 |
| N | CPU Time (s) | |
|---|---|---|
| 10 | 3.6097 | 0.018 |
| 50 | 8.8401 | 0.165 |
| 100 | 1.5063 | 0.479 |
| 150 | 5.2966 | 1.046 |
| 200 | 2.5185 | 1.831 |
| 250 | 1.4119 | 2.721 |
| 300 | 8.8569 | 3.397 |
| 500 | 2.3094 | 7.363 |
| 1000 | 1.0710 | 23.029 |
| N | OC | OC | OC | OC | ||||
|---|---|---|---|---|---|---|---|---|
| 20 | 3.6965 | - | 3.5347 | - | 1.9174 | - | 5.9525 | - |
| 40 | 1.6497 | 1.16 | 1.3360 | 1.40 | 6.3033 | 1.60 | 1.6984 | 1.81 |
| 80 | 7.2079 | 1.19 | 5.0527 | 1.40 | 2.0733 | 1.60 | 4.8498 | 1.81 |
| 120 | 4.4317 | 1.20 | 2.8620 | 1.40 | 1.0824 | 1.60 | 2.3318 | 1.81 |
| 160 | 3.1379 | 1.20 | 1.9124 | 1.40 | 6.8268 | 1.60 | 1.3874 | 1.80 |
| 200 | 2.4007 | 1.20 | 1.3990 | 1.40 | 4.7751 | 1.60 | 9.2759 | 1.80 |
| 240 | 1.9289 | 1.20 | 1.0836 | 1.40 | 3.5659 | 1.60 | 6.6766 | 1.80 |
| N | OC | OC | OC | OC | ||||
|---|---|---|---|---|---|---|---|---|
| 20 | 1.1624 | - | 4.0781 | - | 1.0764 | - | 1.8809 | - |
| 40 | 1.0453 | 0.15 | 3.1153 | 0.39 | 7.1834 | 0.58 | 1.0960 | 0.78 |
| 80 | 9.1739 | 0.19 | 2.3697 | 0.39 | 4.7653 | 0.59 | 6.3385 | 0.79 |
| 120 | 8.4738 | 0.20 | 2.0173 | 0.40 | 3.7430 | 0.60 | 4.5930 | 0.79 |
| 160 | 8.0061 | 0.20 | 1.7991 | 0.40 | 3.1524 | 0.60 | 3.6528 | 0.80 |
| 200 | 7.6601 | 0.20 | 1.6460 | 0.40 | 2.7588 | 0.60 | 3.0577 | 0.80 |
| 240 | 7.3879 | 0.20 | 1.5306 | 0.40 | 2.4738 | 0.60 | 2.6439 | 0.80 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, T.; Wu, Y. Hermite Cubic Spline Collocation Method for Nonlinear Fractional Differential Equations with Variable-Order. Symmetry 2021, 13, 872. https://doi.org/10.3390/sym13050872
Zhao T, Wu Y. Hermite Cubic Spline Collocation Method for Nonlinear Fractional Differential Equations with Variable-Order. Symmetry. 2021; 13(5):872. https://doi.org/10.3390/sym13050872
Chicago/Turabian StyleZhao, Tinggang, and Yujiang Wu. 2021. "Hermite Cubic Spline Collocation Method for Nonlinear Fractional Differential Equations with Variable-Order" Symmetry 13, no. 5: 872. https://doi.org/10.3390/sym13050872