Balance Adjustment of Power-Line Inspection Robot Using General Type-2 Fractional Order Fuzzy PID Controller


Abstract
:1. Introduction
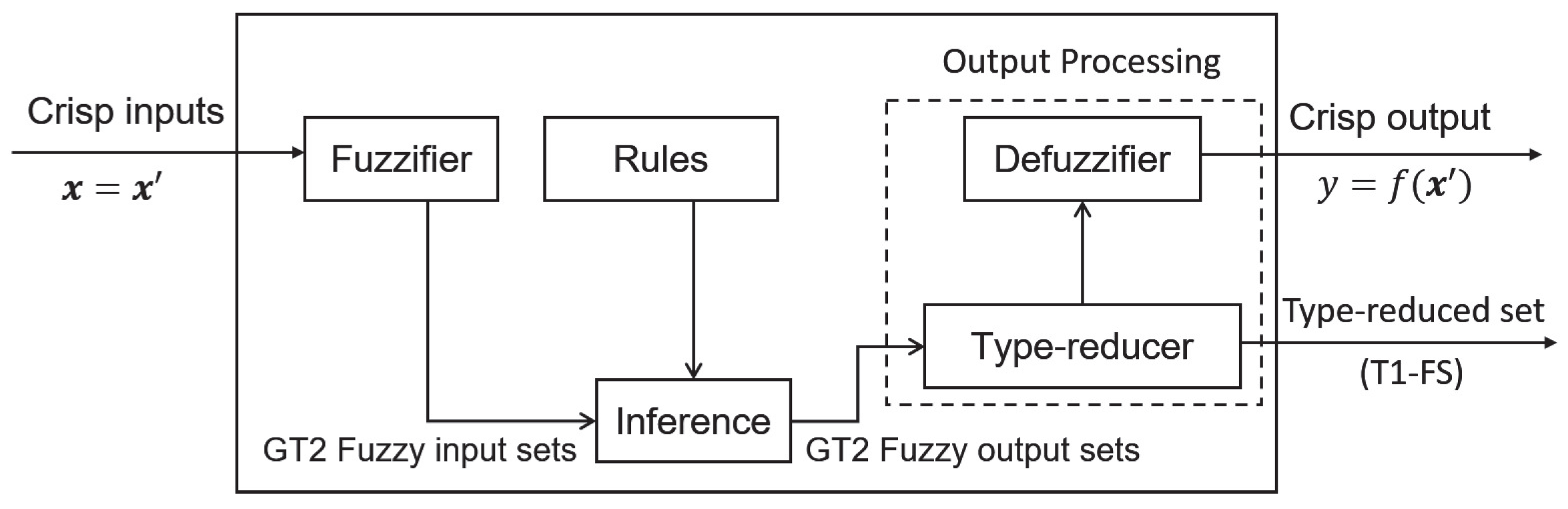
2. General Type-2 Fuzzy Logic System
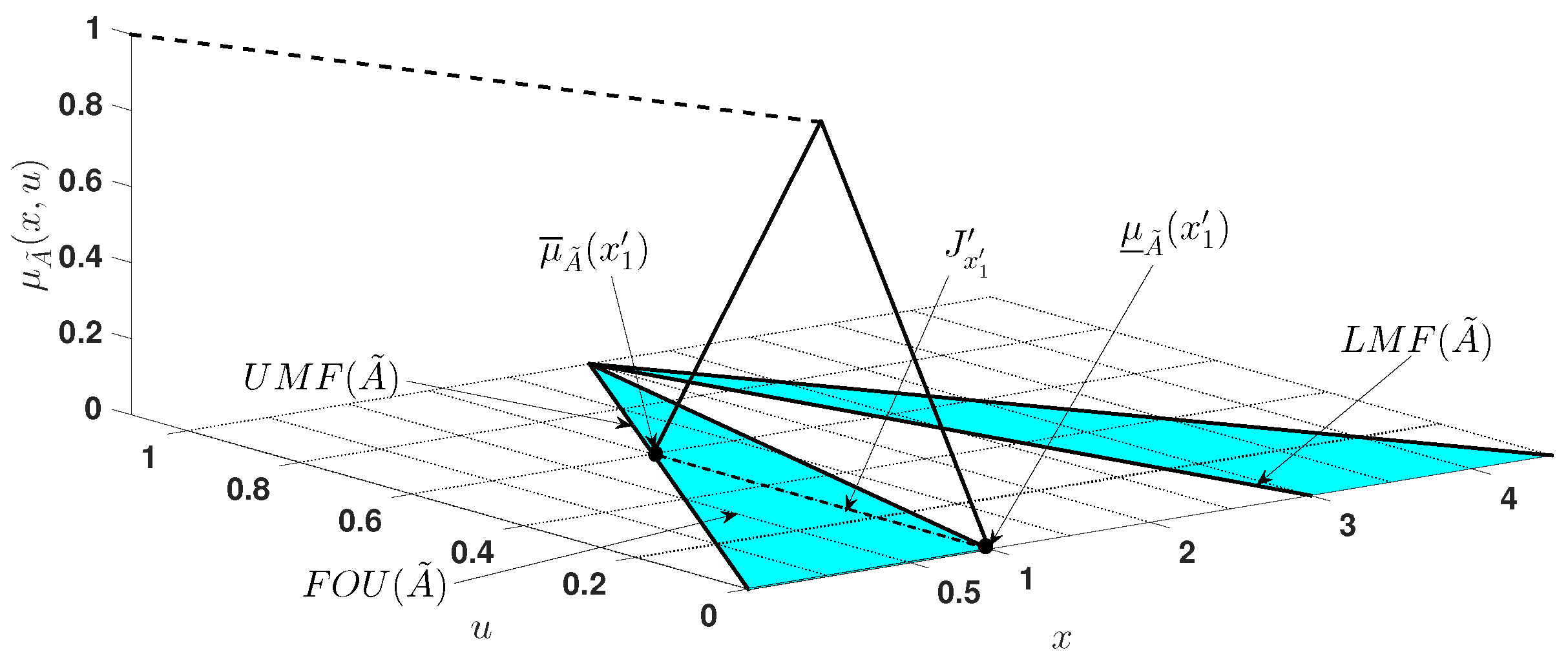
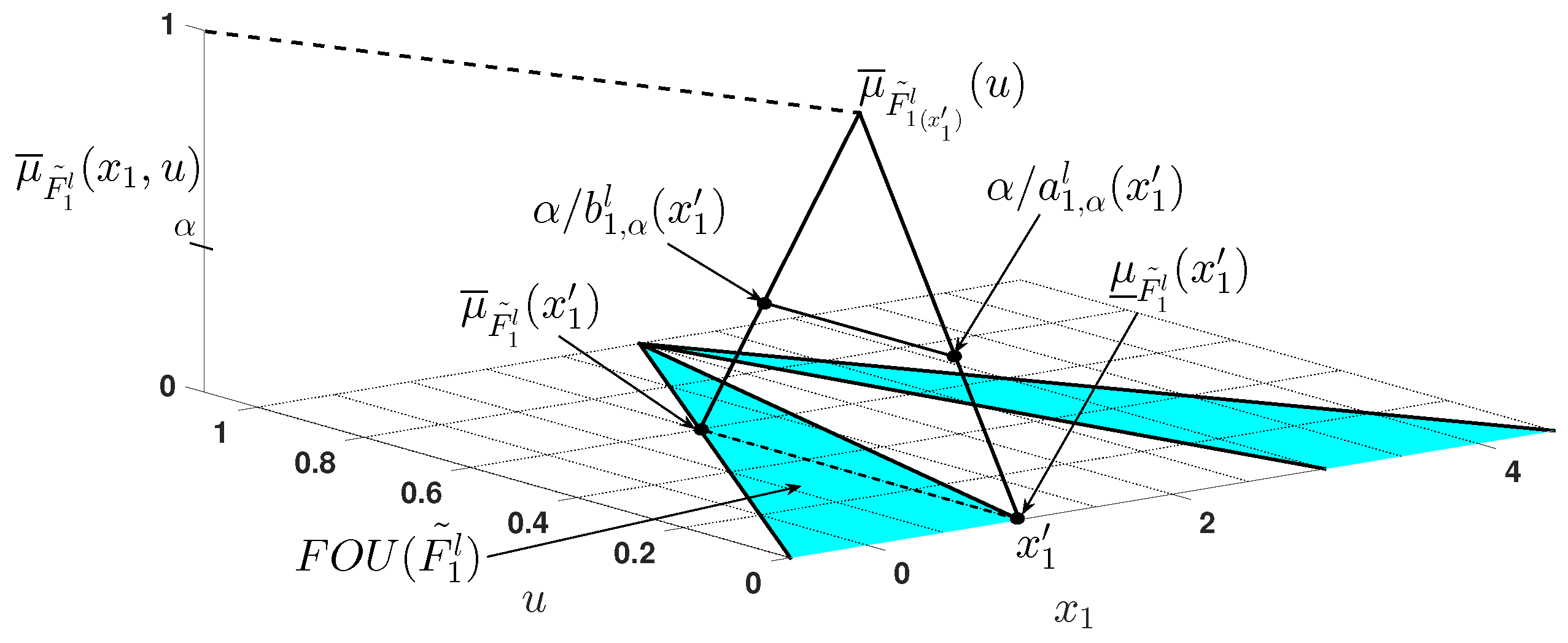
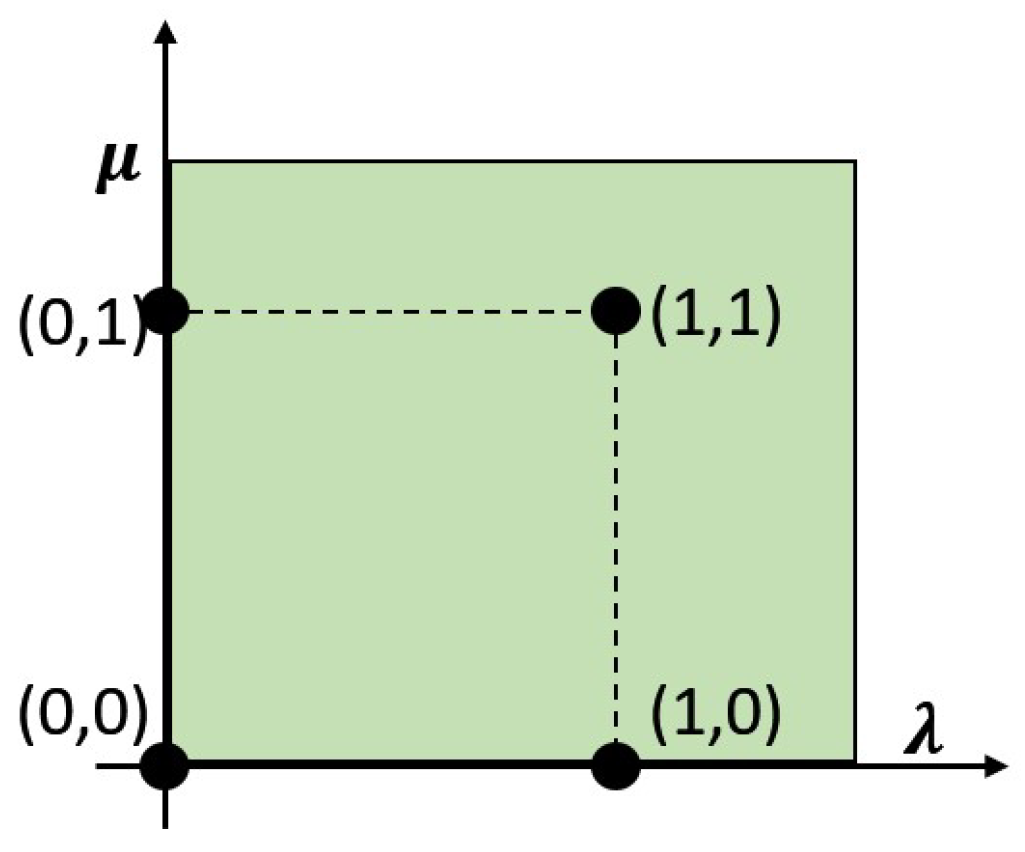
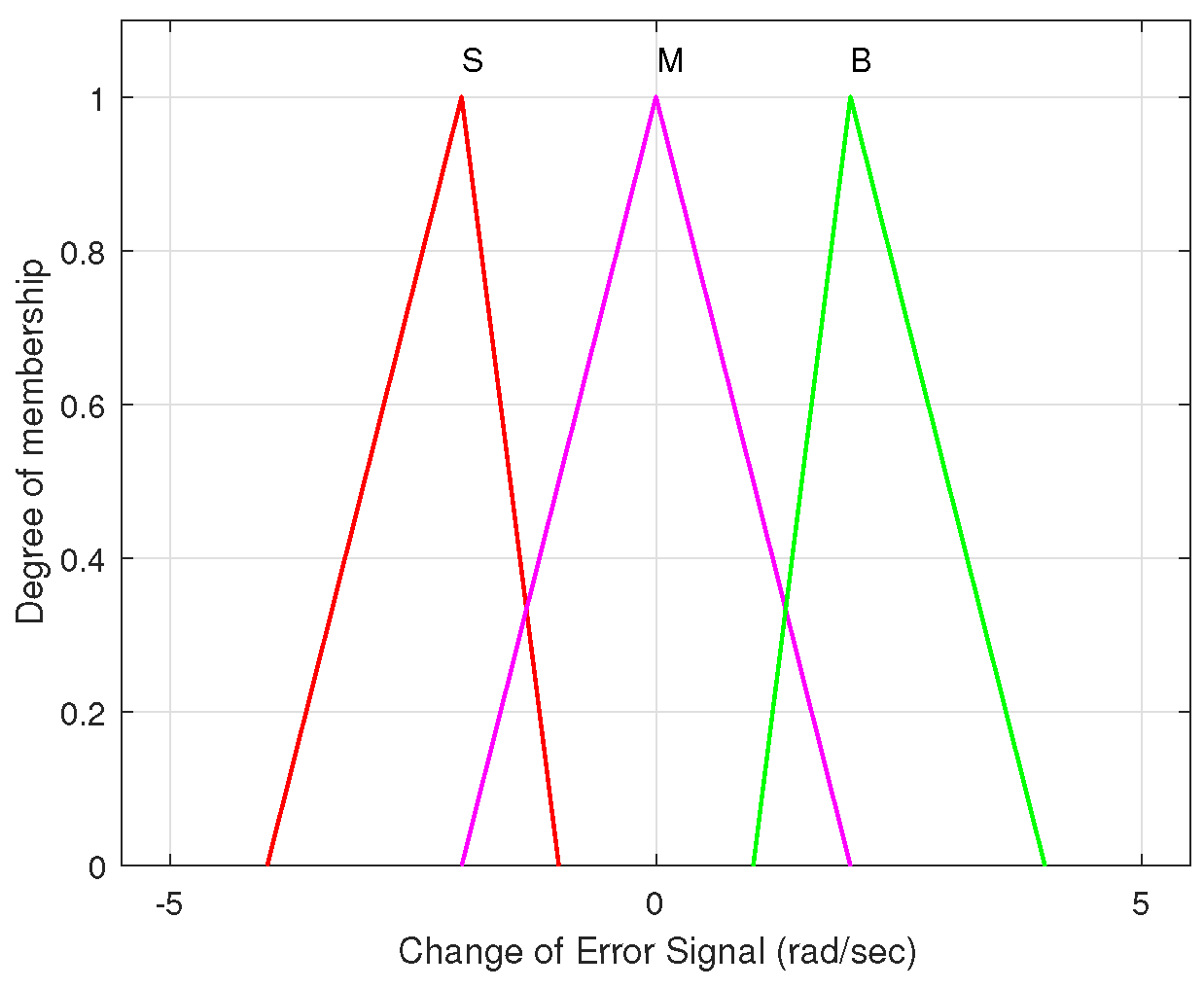
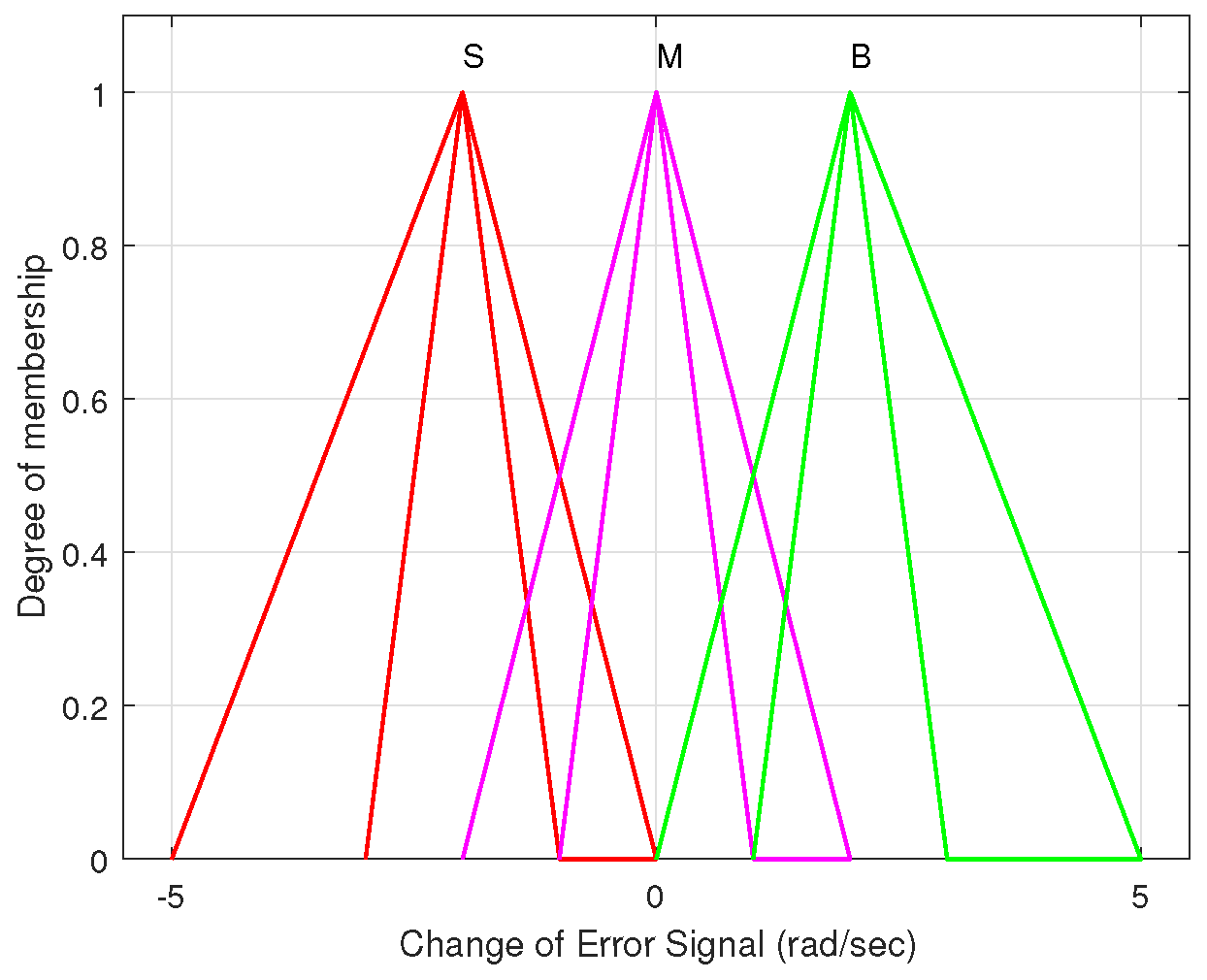
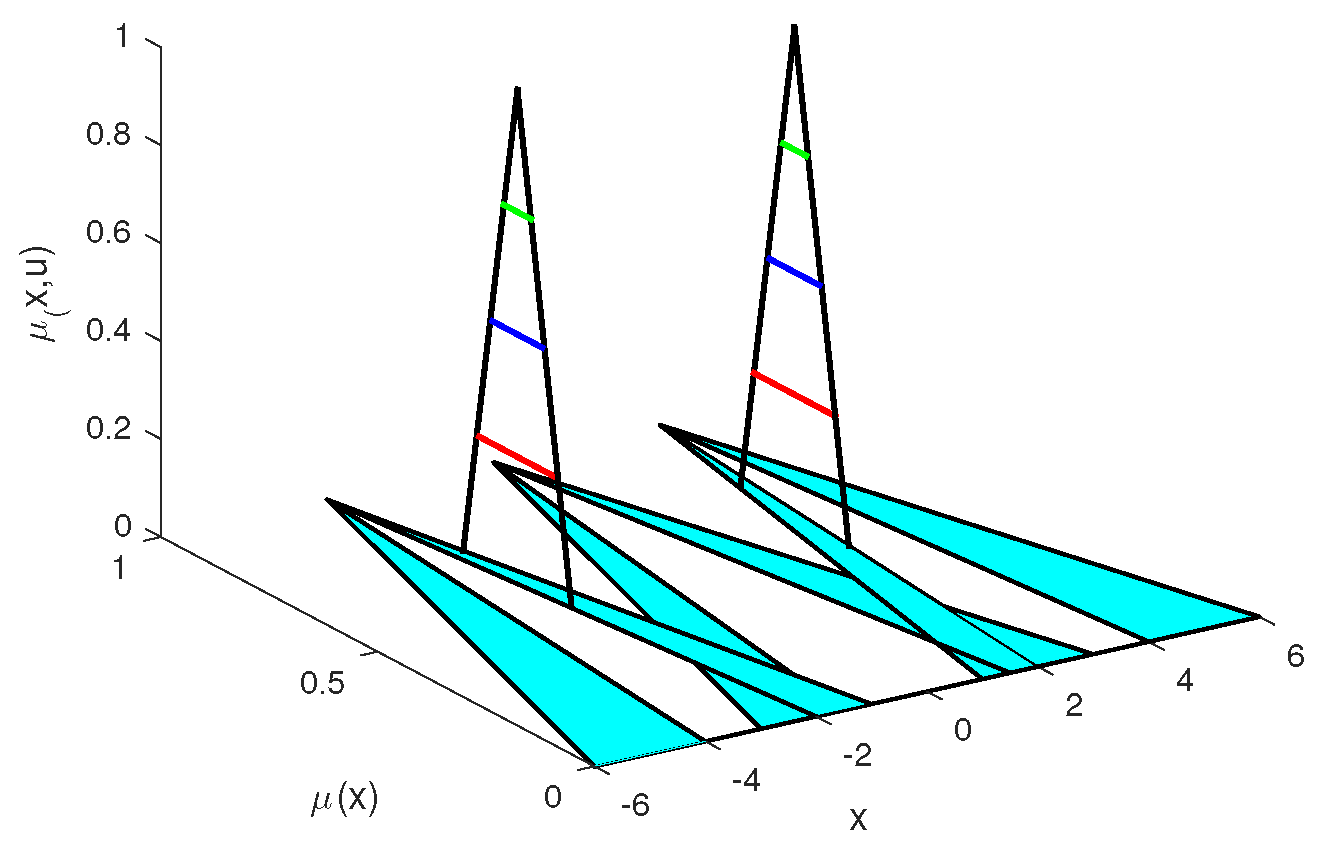
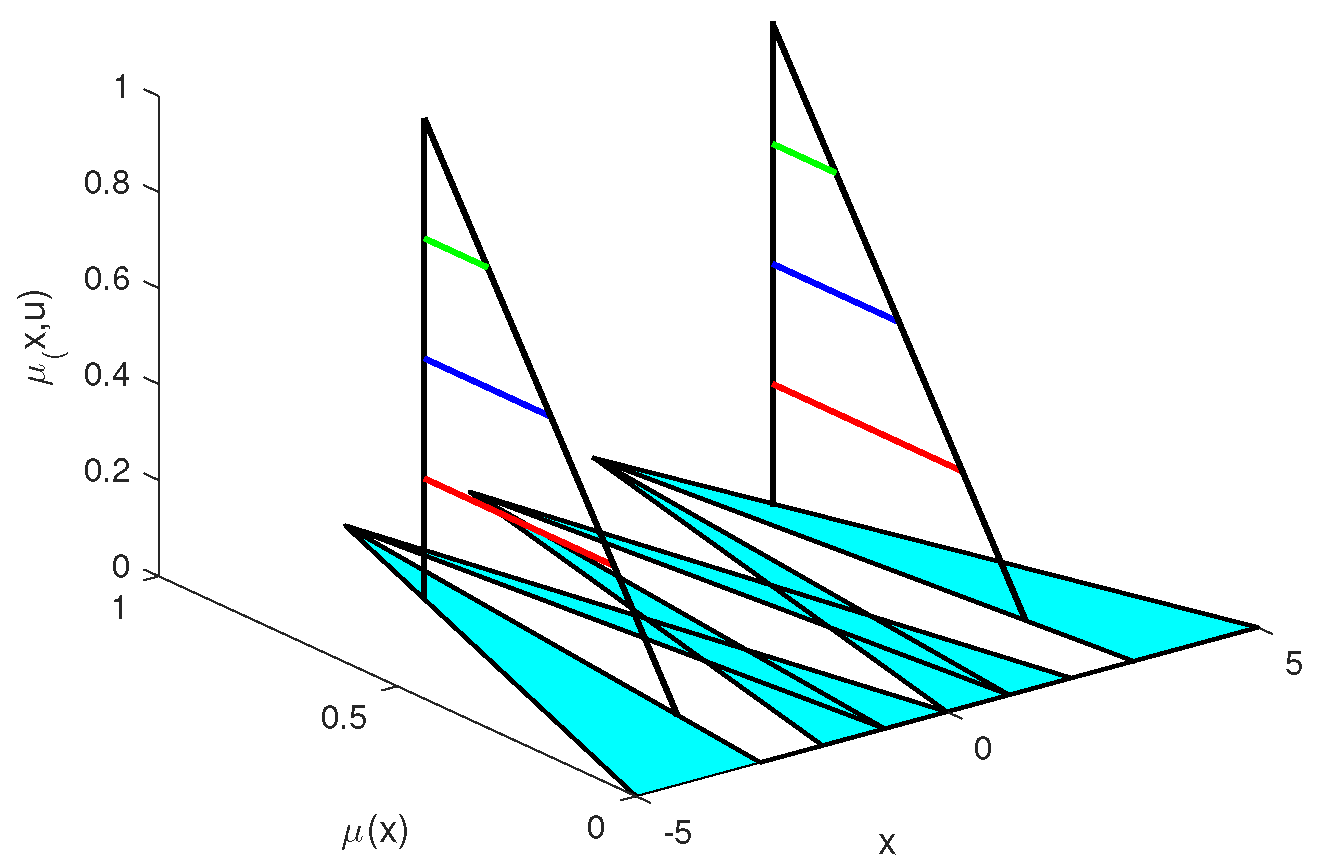
2.1. General Type-2 Fuzzy Sets
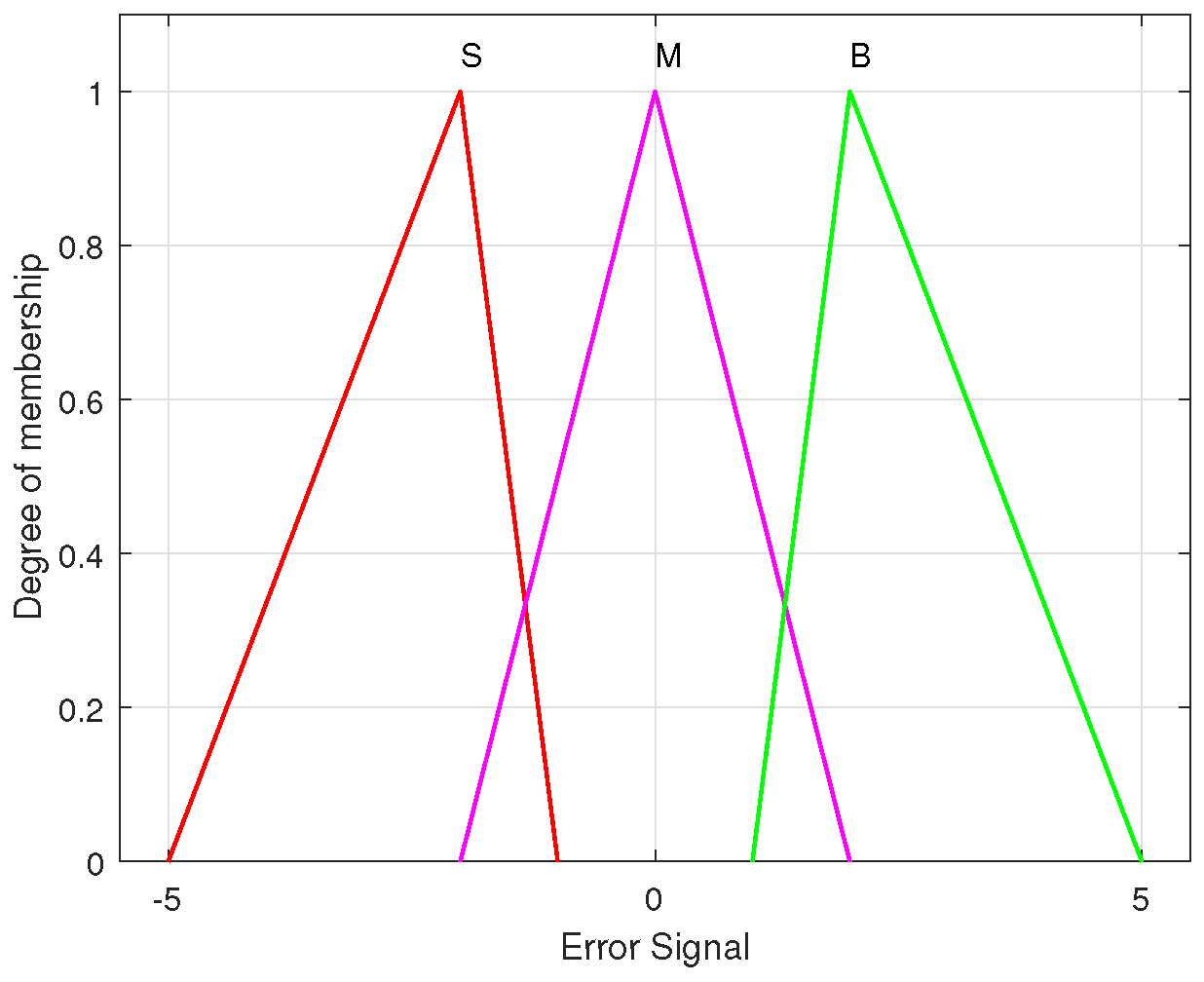
2.2. Rule Base
2.3. Fuzzy Inference Engine
2.4. Type-Reduction and Defuzzification
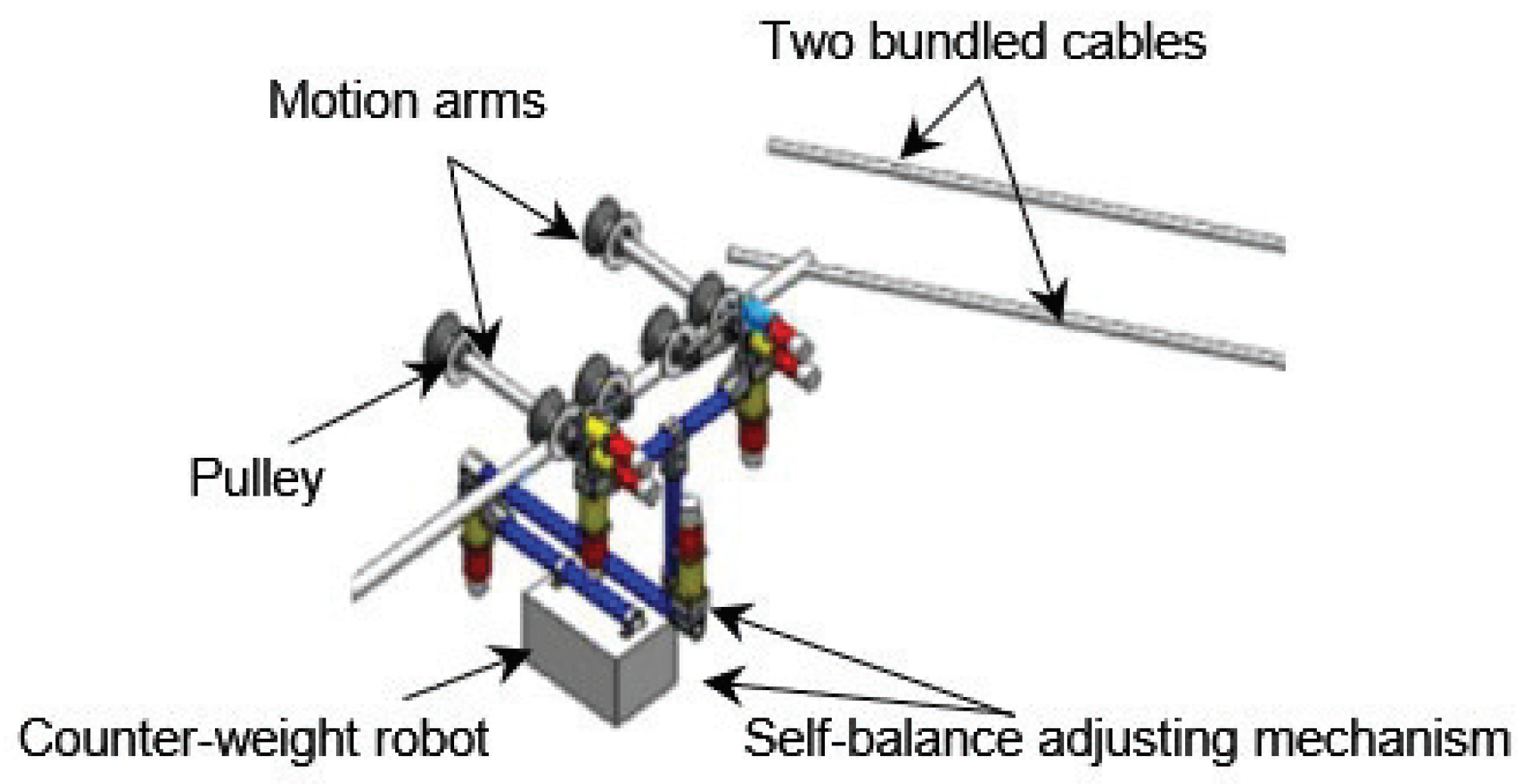
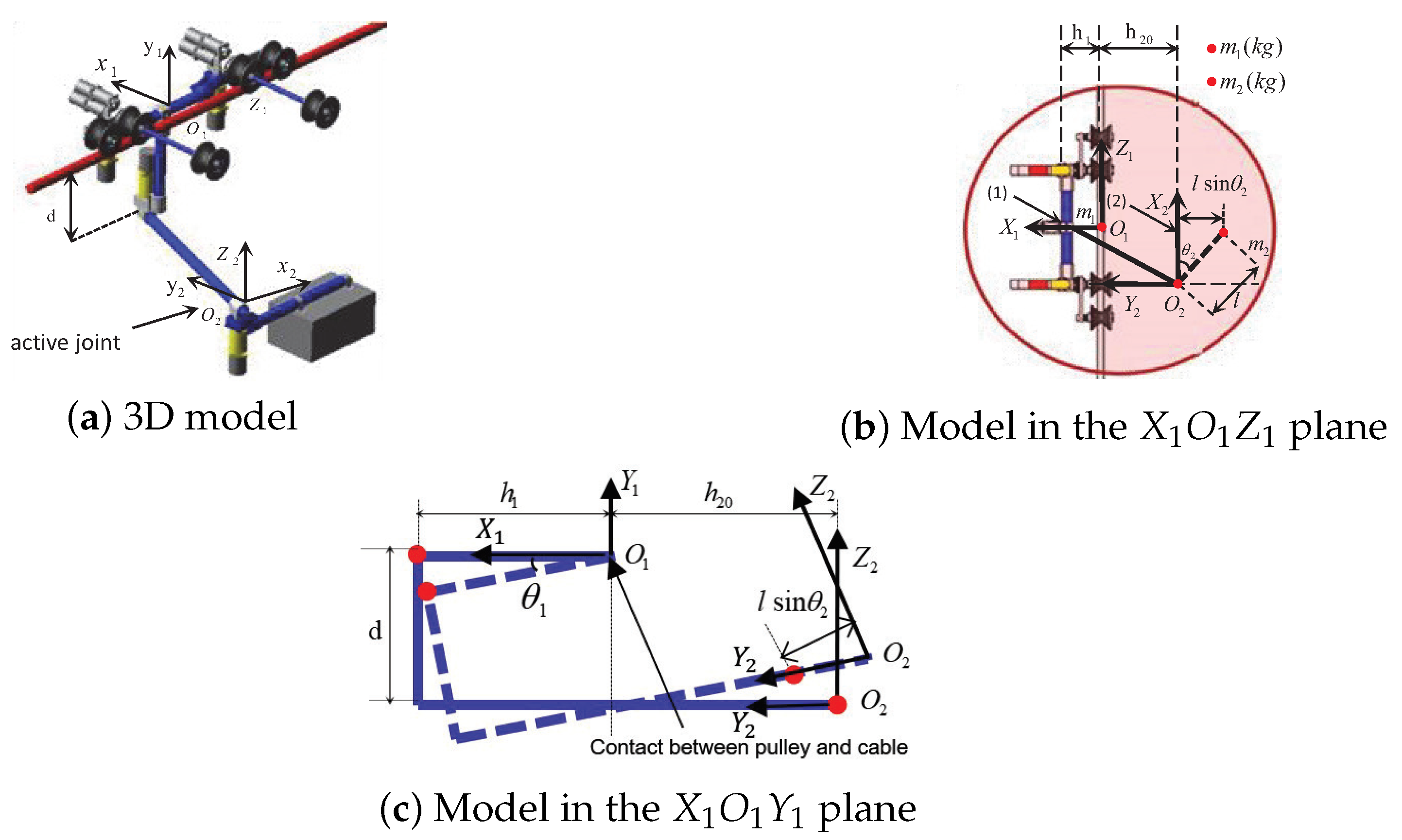
3. PLI Robot System
Mathematical Model of PLI Robot System
4. Design of GT2FO-FPID Controller
4.1. Approximations of Fractional Order Operation
4.2. Structure of PID Controller
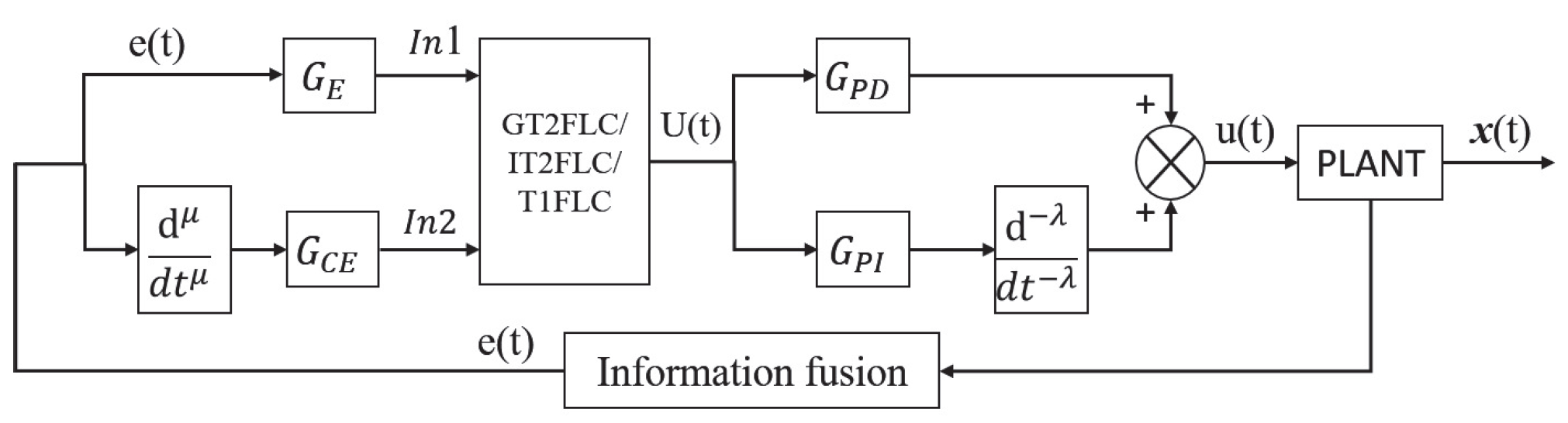
4.3. Structure of GT2FO-FPID Controller
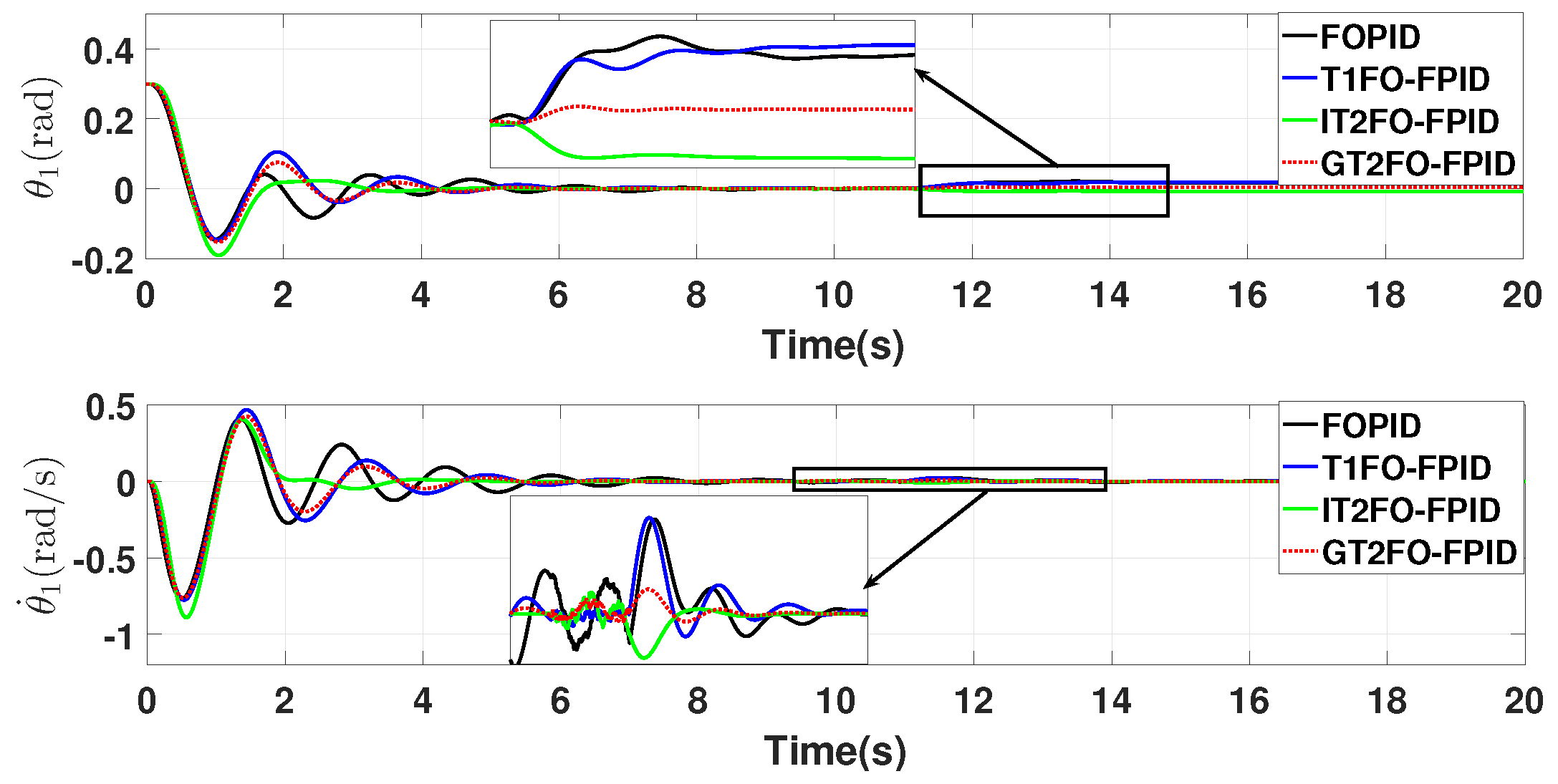
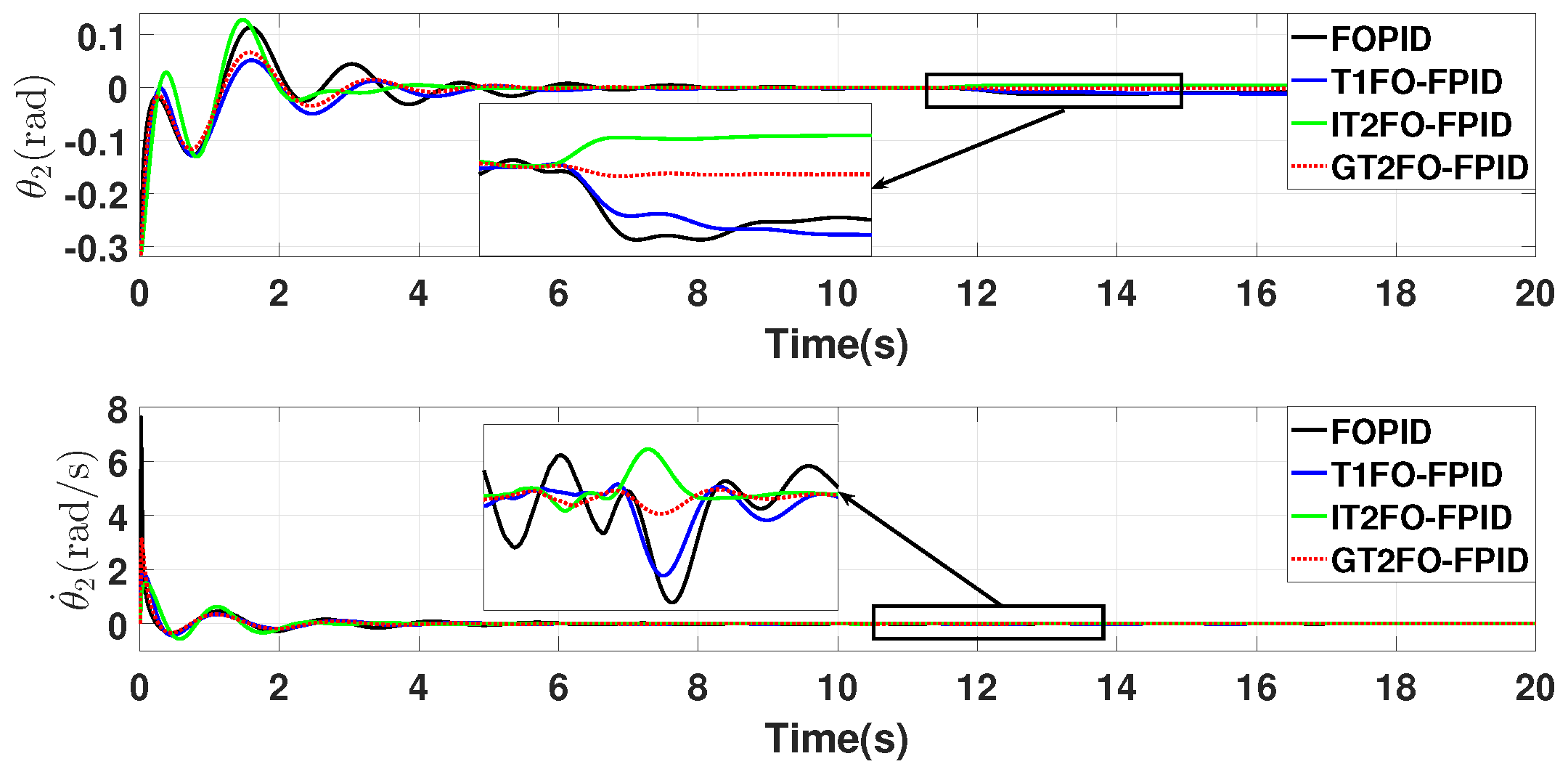
5. Simulation
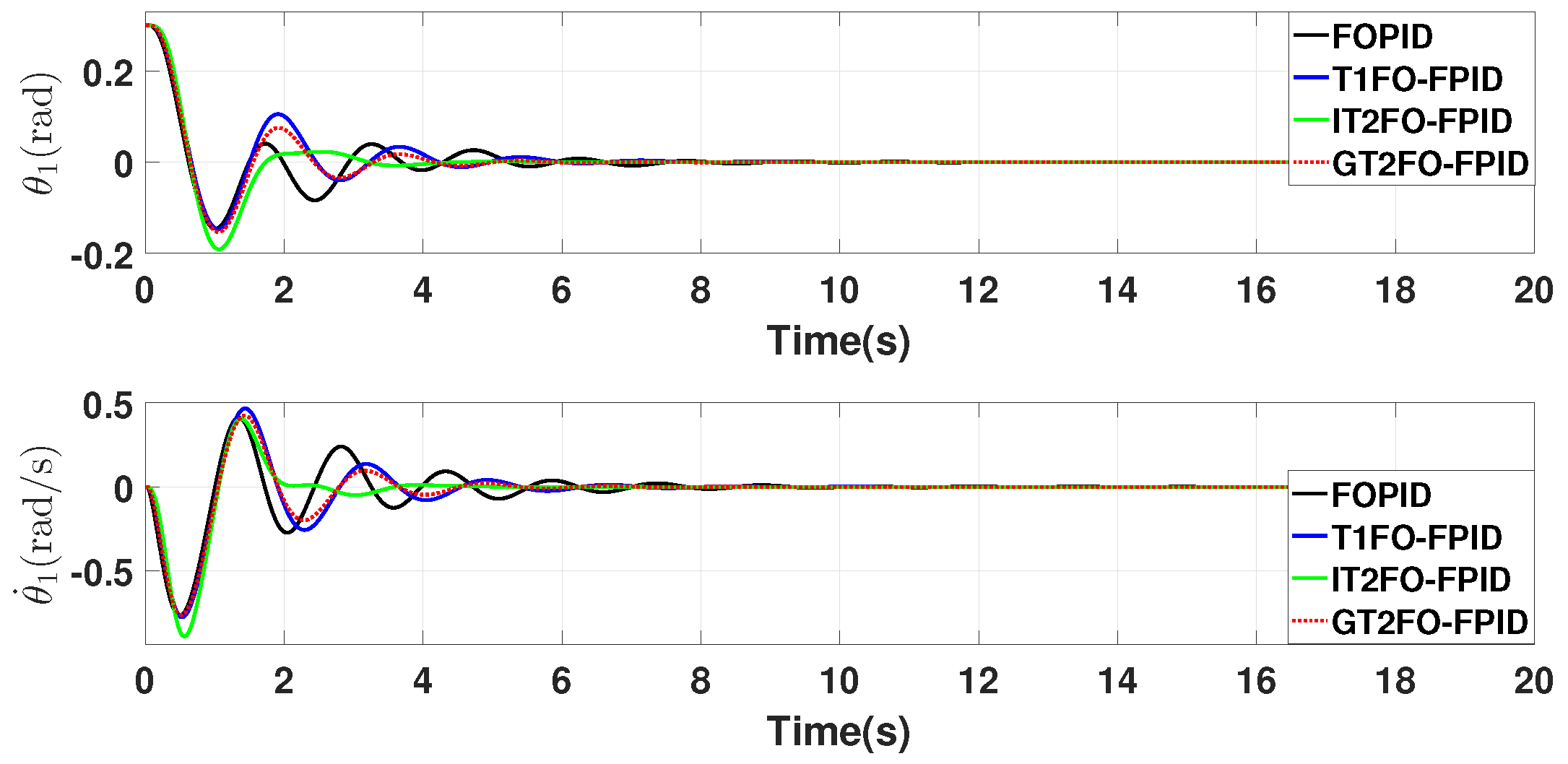
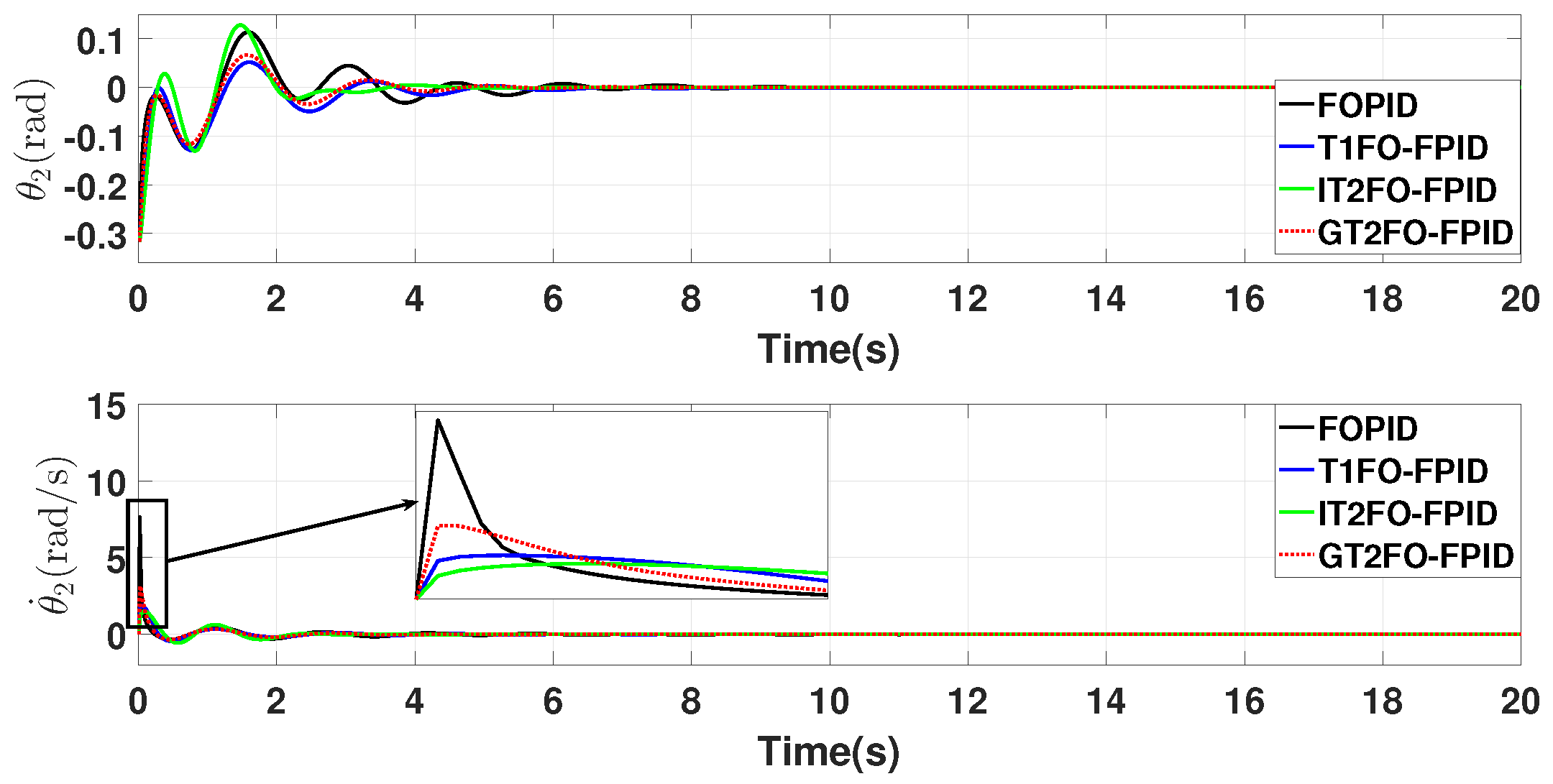
5.1. Case 1: Normal Case
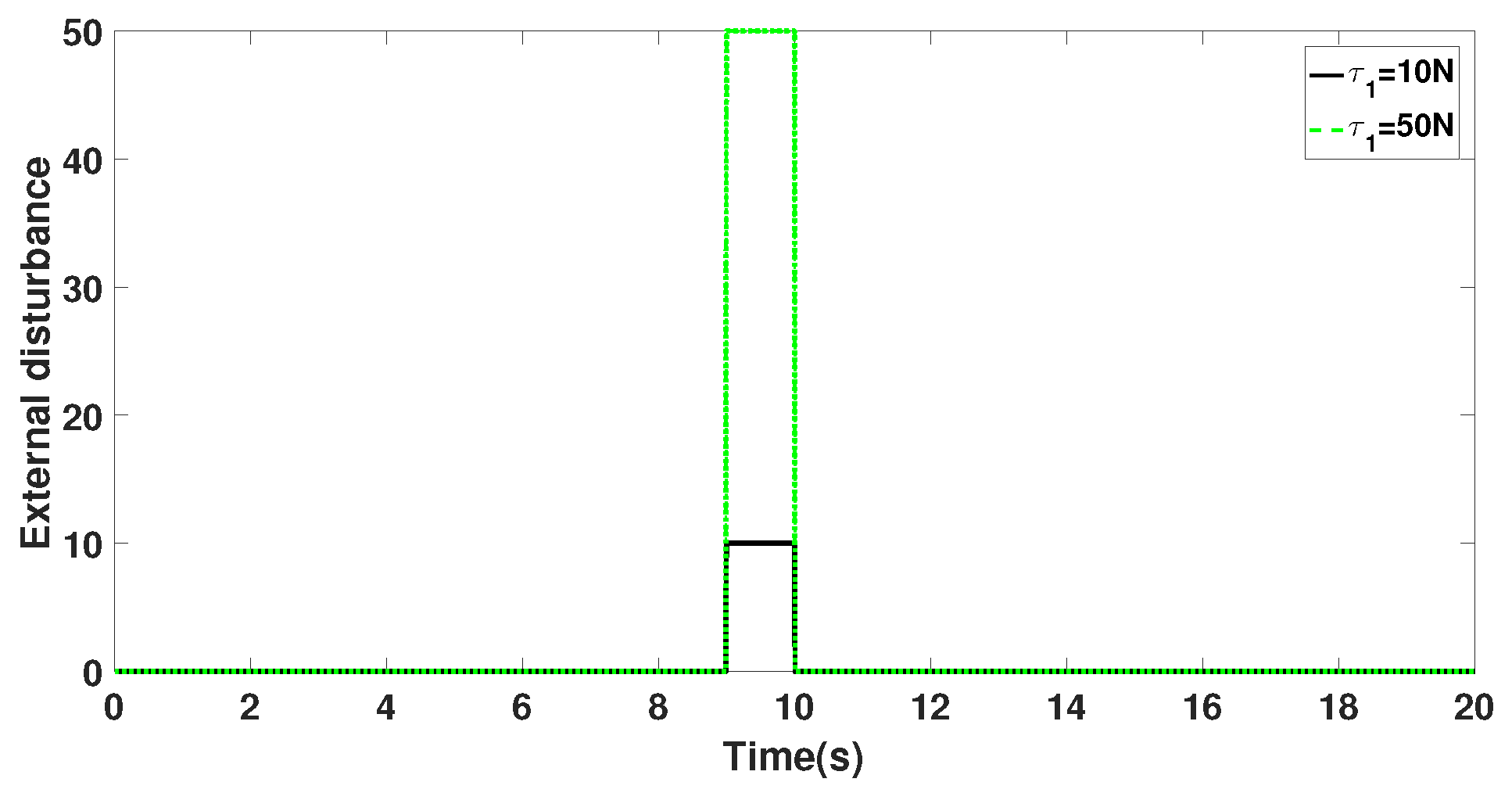
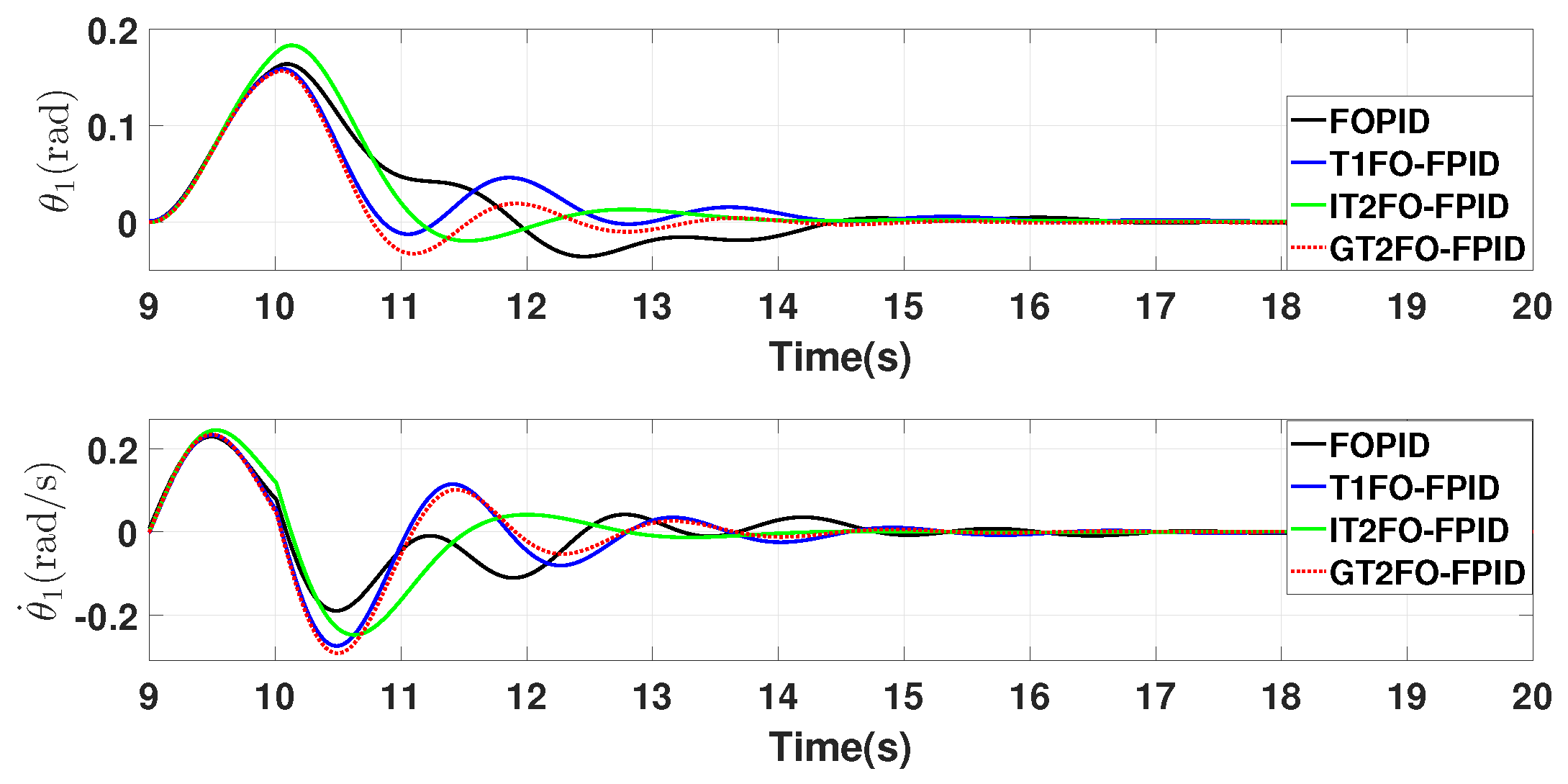
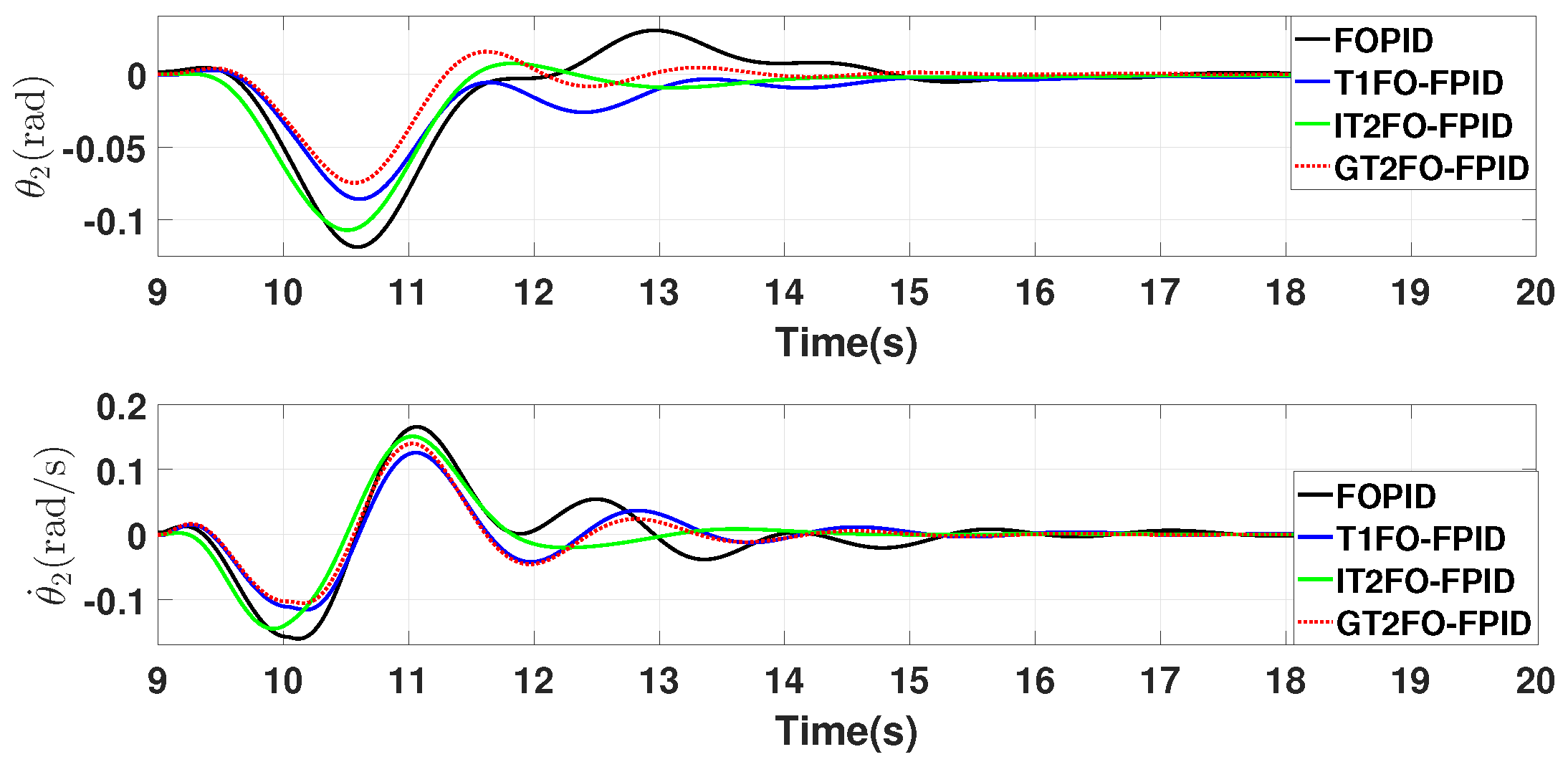
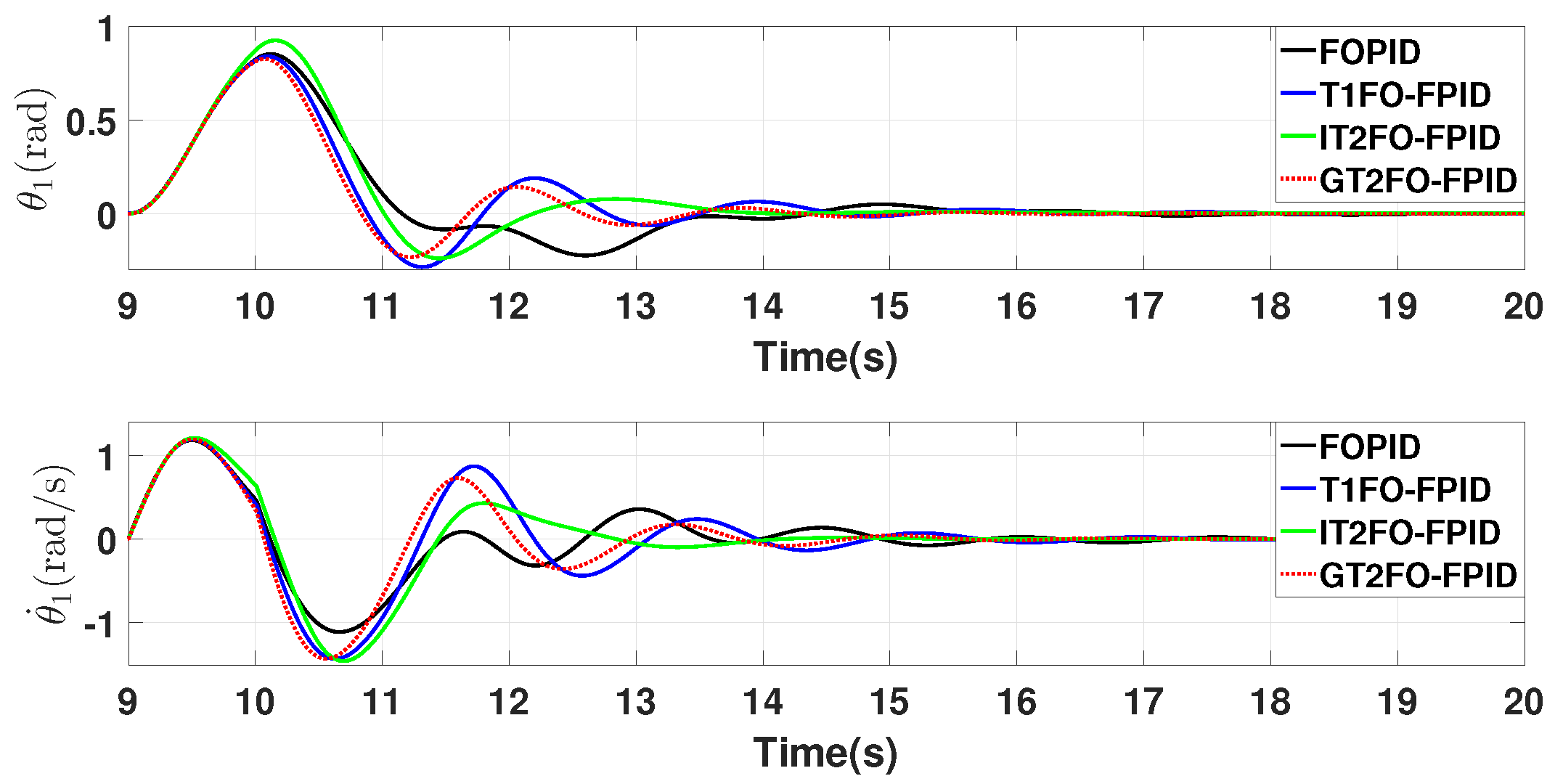
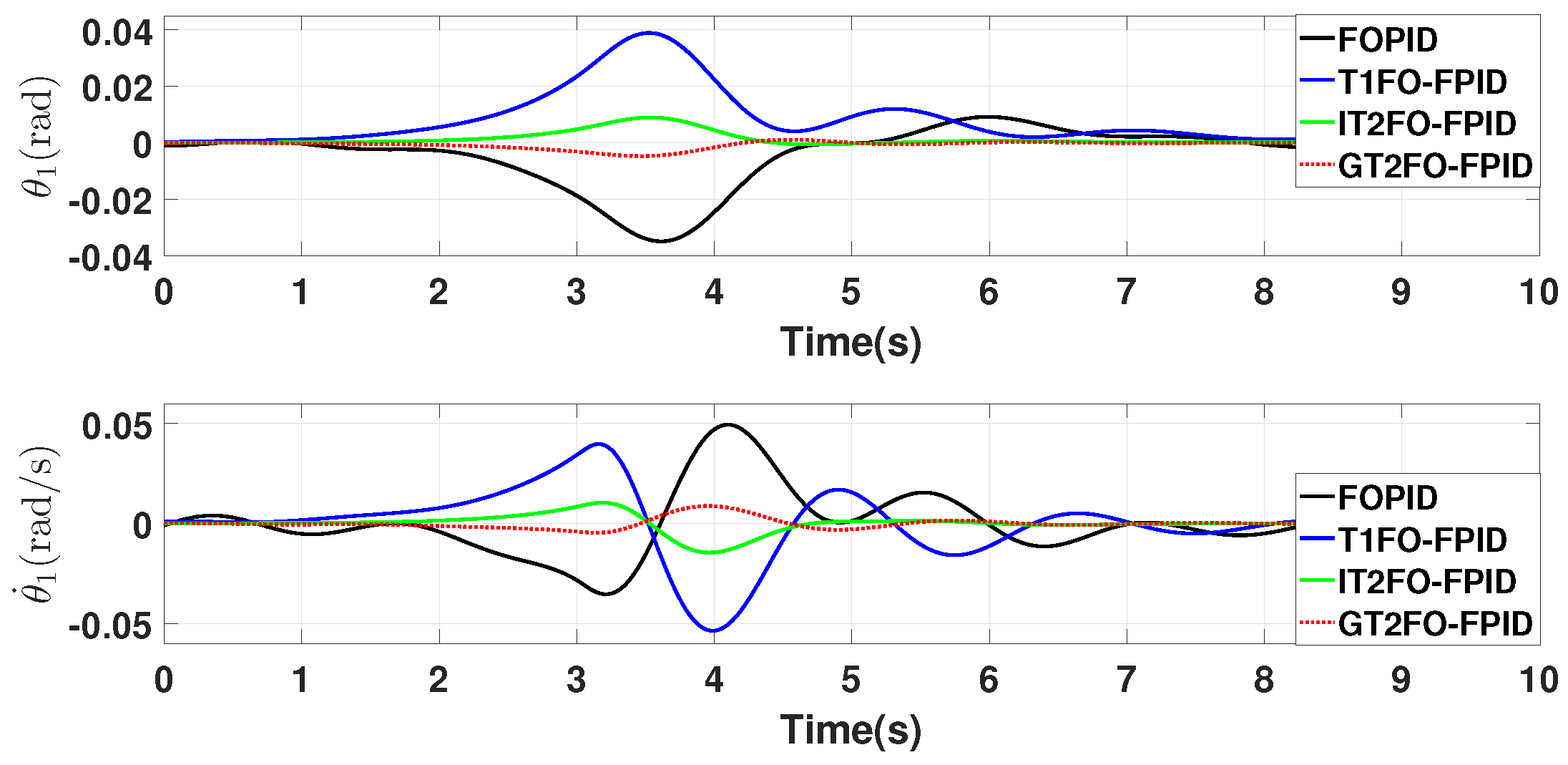
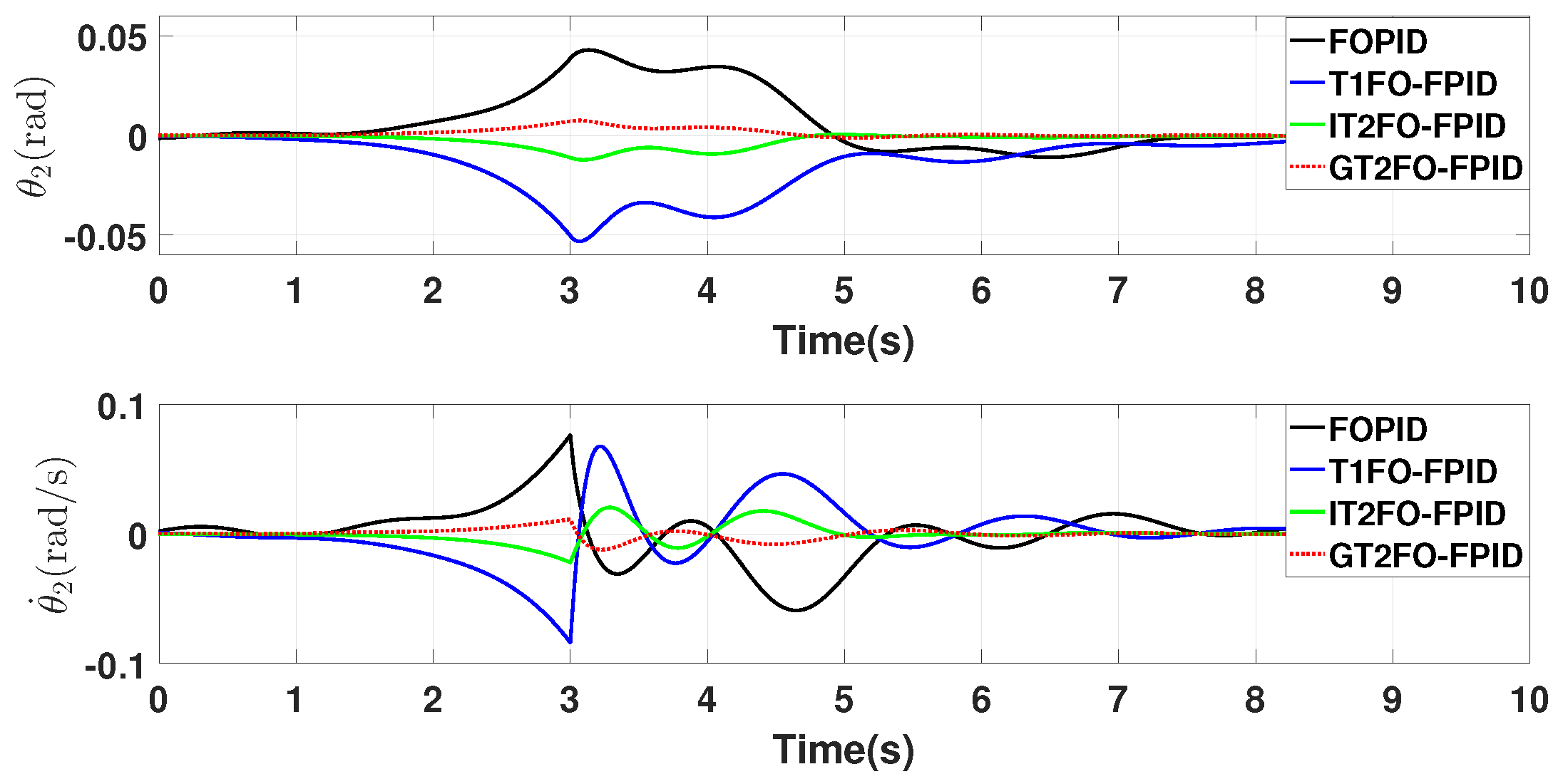
5.2. Case 2: External Disturbance
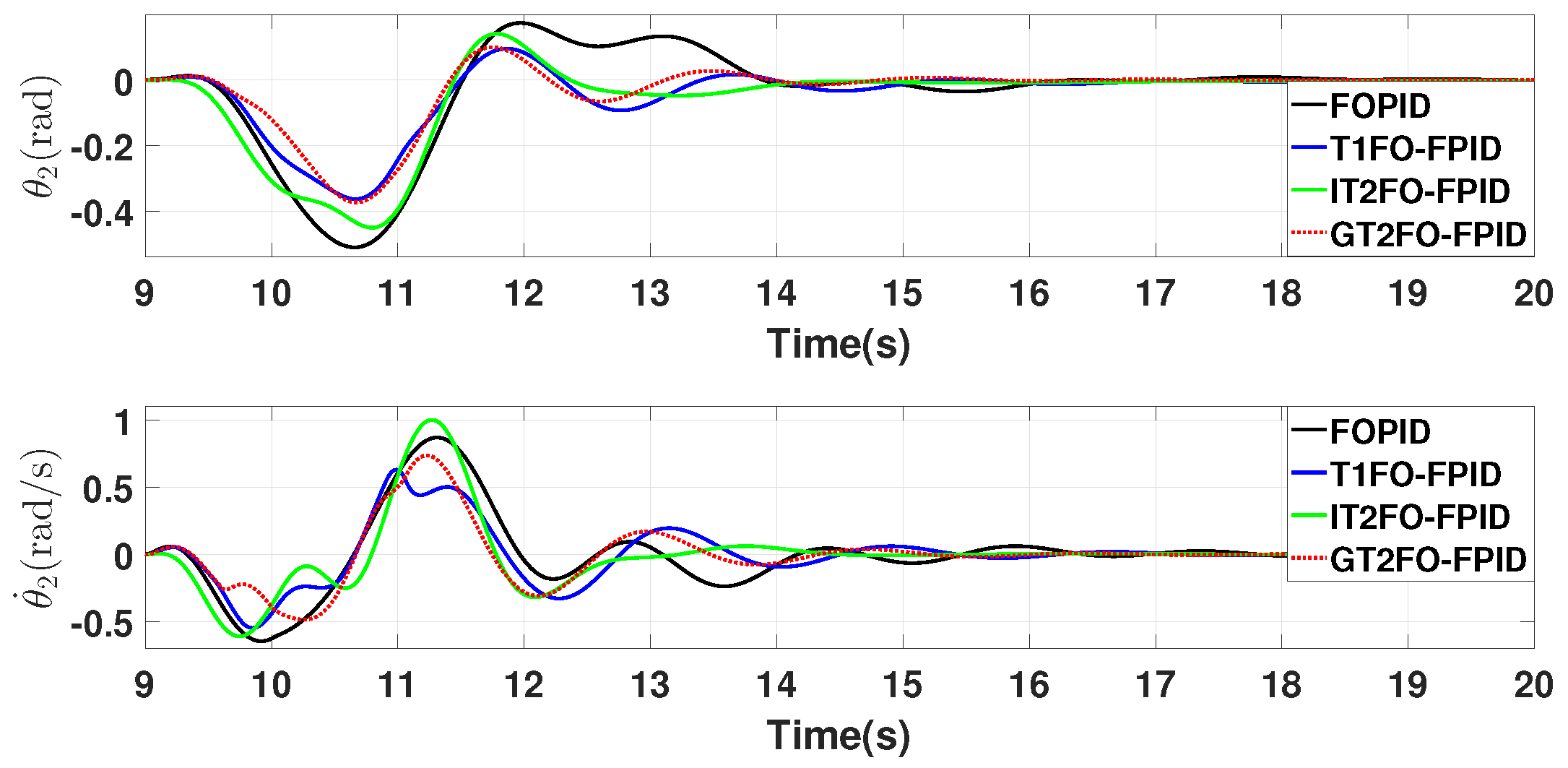
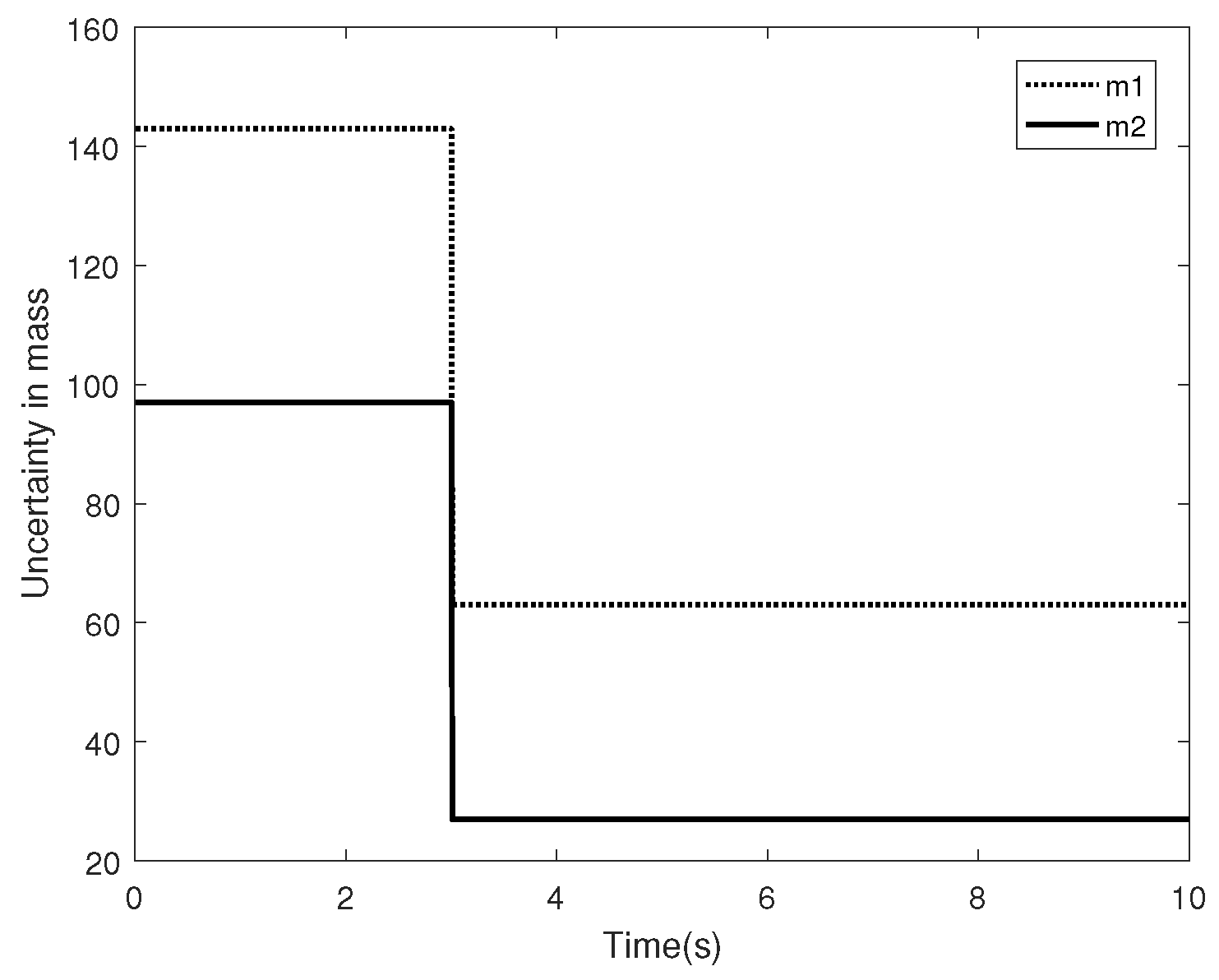
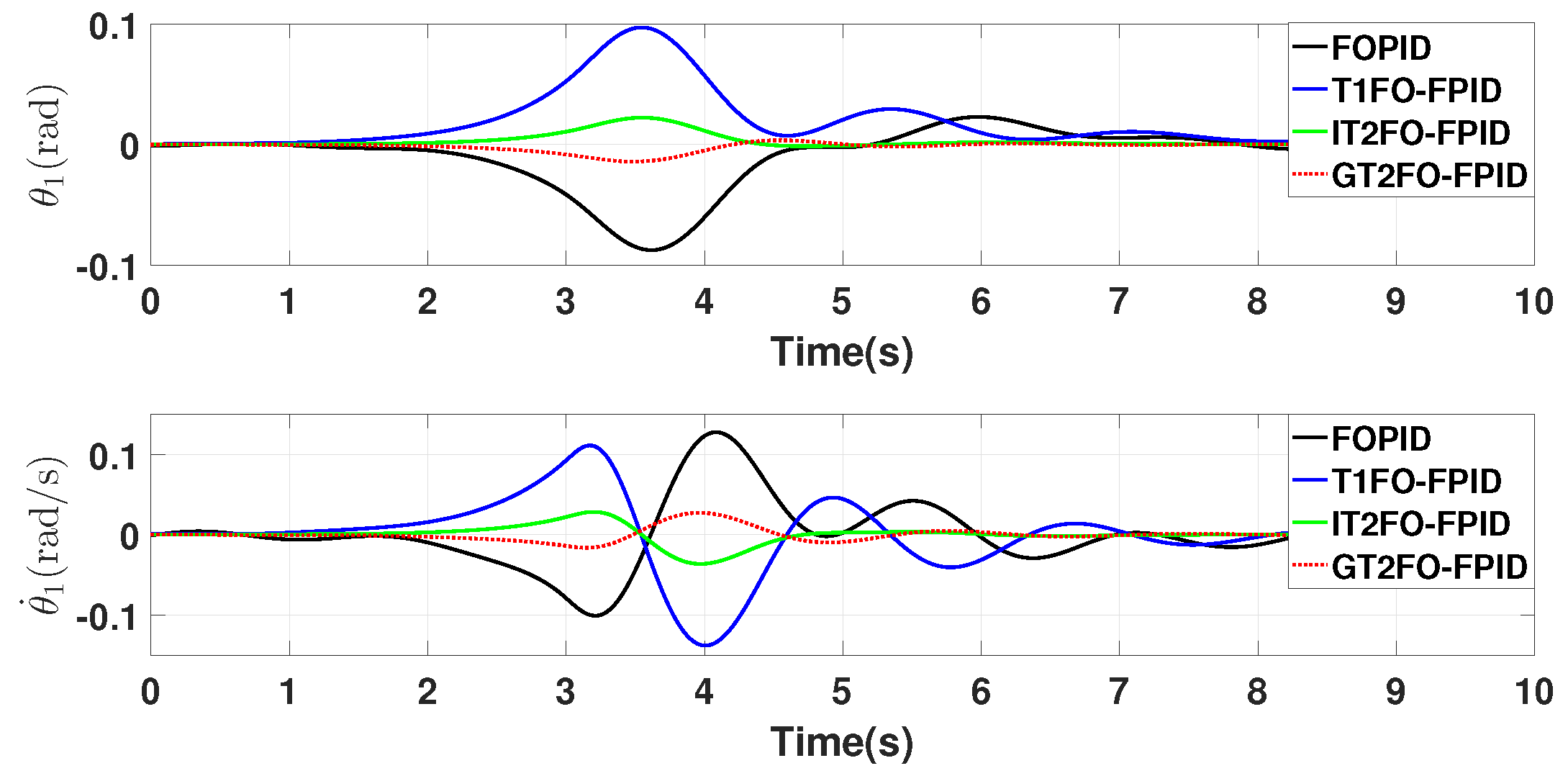
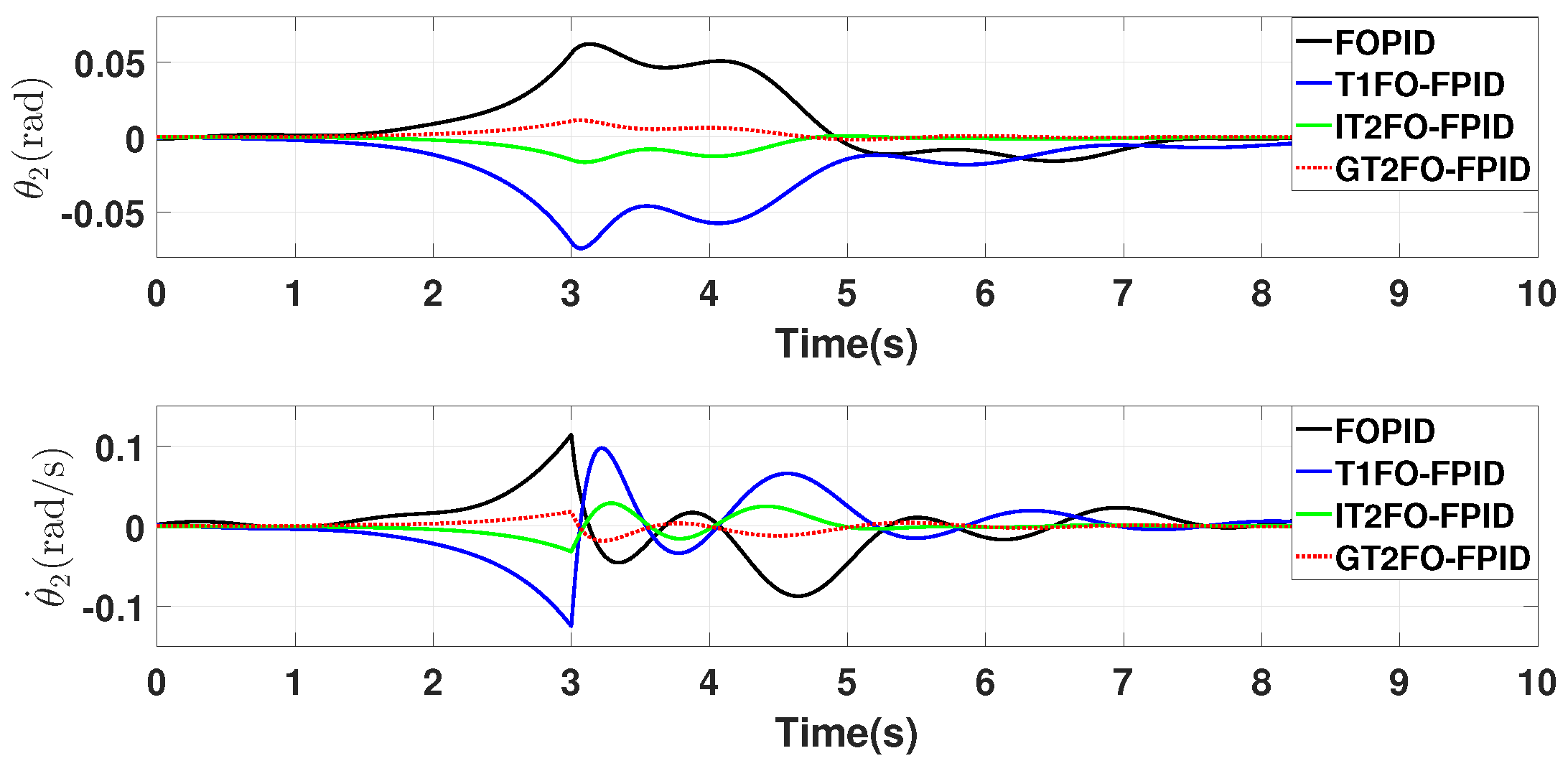
5.3. Case 3: Uncertainty in Mass
5.4. Case 4: Random Disturbance
6. Conclusion and Future Work
6.1. Conclusions
6.2. Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Caponetto, R. Fractional Order Systems: Modeling and Control Applications; World Scientific: Singapore, 2010; Volume 72. [Google Scholar]
- Kumar, A.; Kumar, V. A novel interval type-2 fractional order fuzzy PID controller: Design, performance evaluation, and its optimal time domain tuning. ISA Trans. 2017, 68, 251–275. [Google Scholar] [CrossRef] [PubMed]
- Podlubny, I. Fractional-order systems and PλDμ controllers. IEEE Trans. Autom. Control 1999, 44, 208–214. [Google Scholar] [CrossRef]
- Monje, C.A.; Vinagre, B.M.; Feliu, V.; Chen, Y. Tuning and auto-tuning of fractional order controllers for industry applications. Control Eng. Pract. 2008, 16, 798–812. [Google Scholar] [CrossRef] [Green Version]
- Cao, J.Y.; Liang, J.; Cao, B.G. Optimization of fractional order PID controllers based on genetic algorithms. In Proceedings of the IEEE International Conference on Machine Learning and Cybernetics, Guangzhou, China, 18–21 August 2005; Volume 9, pp. 5686–5689. [Google Scholar]
- Padula, F.; Visioli, A. Tuning rules for optimal PID and fractional-order PID controllers. J. Process Control 2011, 21, 69–81. [Google Scholar] [CrossRef]
- Bohannan, G.W. Analog fractional order controller in temperature and motor control applications. J. Vib. Control 2008, 14, 1487–1498. [Google Scholar] [CrossRef]
- Zamani, M.; Karimi-Ghartemani, M.; Sadati, N.; Parniani, M. Design of a fractional order PID controller for an AVR using particle swarm optimization. Control Eng. Pract. 2009, 17, 1380–1387. [Google Scholar] [CrossRef]
- Bouarroudj, N. A hybrid fuzzy fractional order PID sliding-mode controller design using PSO algorithm for interconnected nonlinear systems. J. Control Eng. Appl. Inform. 2015, 17, 41–51. [Google Scholar]
- Sharma, R.; Rana, K.P.S.; Kumar, V. Performance analysis of fractional order fuzzy PID controllers applied to a robotic manipulator. Expert Syst. Appl. 2014, 41, 4274–4289. [Google Scholar] [CrossRef]
- Bhimte, R.; Bhole, K.; Shah, P. Fractional Order Fuzzy PID Controller for a Rotary Servo System. In Proceedings of the 2nd IEEE International Conference on Trends in Electronics and Informatics (ICOEI 2018), Tirunelveli, India, 11–12 May 2018; pp. 538–542. [Google Scholar]
- Ahmad, F.; Mazlan, S.A.; Hudha, K.; Jamaluddin, H.; Zamzuri, H. Fuzzy fractional PID gain controller for antilock braking system using an electronic wedge brake mechanism. Int. J. Veh. Saf. 2018, 10, 97–121. [Google Scholar] [CrossRef]
- Hagras, H. Type-2 FLCs: A new generation of fuzzy controllers. IEEE Comput. Intell. Mag. 2007, 2, 30–43. [Google Scholar] [CrossRef]
- Mendel, J.M.; John, R.I.B. Type-2 fuzzy sets made simple. IEEE Trans. Fuzzy Syst. 2002, 10, 117–127. [Google Scholar] [CrossRef]
- Zadeh, L.A. The concept of a linguistic variable and its application to approximate reasoning-I. Inf. Sci. 1975, 8, 199–249. [Google Scholar] [CrossRef]
- Li, H.; Wang, J.; Lam, H.K.; Zhou, Q.; Du, H. Adaptive sliding mode control for interval type-2 fuzzy systems. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 1654–1663. [Google Scholar] [CrossRef]
- Li, C.; Gao, J.; Yi, J.; Zhang, G. Analysis and design of functionally weighted single-input-rule-modules connected fuzzy inference systems. IEEE Trans. Fuzzy Syst. 2016, 26, 56–71. [Google Scholar] [CrossRef]
- Li, H.; Wu, C.; Shi, P.; Gao, Y. Control of nonlinear networked systems with packet dropouts: Interval type-2 fuzzy model-based approach. IEEE Trans. Cybern. 2015, 45, 2378–2389. [Google Scholar] [CrossRef] [PubMed]
- Jhang, J.Y.; Lin, C.J.; Lin, C.T.; Young, K.Y. Navigation Control of Mobile Robots Using an Interval Type-2 Fuzzy Controller Based on Dynamic-group Particle Swarm Optimization. Int. J. Control Autom. Syst. 2018, 16, 2446–2457. [Google Scholar] [CrossRef]
- Li, H.; Wang, J.; Wu, L.; Lam, H.K.; Gao, Y. Optimal guaranteed cost sliding-mode control of interval type-2 fuzzy time-delay systems. IEEE Trans. Fuzzy Syst. 2018, 26, 246–257. [Google Scholar] [CrossRef] [Green Version]
- Zhao, T.; Liu, J.H.; Dian, S.Y. Finite-time control for interval type-2 fuzzy time-delay systems with normbounded uncertainties and limited communication capacity. Inf. Sci. 2019, 483, 153–173. [Google Scholar] [CrossRef]
- Zhao, T.; Dian, S.Y. State feedback control for interval type-2 fuzzy systems with time-varying delay and unreliable communication links. IEEE Trans. Fuzzy Syst. 2018, 26, 951–966. [Google Scholar] [CrossRef]
- Zhao, T.; Dian, S.Y. Delay-dependent stabilization of discrete-time interval type-2 t-s fuzzy systems with time-varying delay. J. Frankl. Inst. 2017, 354, 1542–1567. [Google Scholar] [CrossRef]
- Castillo, O.; Amador-Angulo, L.; Castro, J.R.; Garcia-Valdez, M. A comparative study of type-1 fuzzy logic systems, interval type-2 fuzzy logic systems and generalized type-2 fuzzy logic systems in control problems. Inf. Sci. 2016, 354, 257–274. [Google Scholar] [CrossRef]
- Zhai, D.; Mendel, J.M. Centroid of a general type-2 fuzzy set computed by means of the centroid-flow algorithm. In Proceedings of the IEEE International Conference on Fuzzy Systems 2010, Barcelona, Spain, 18–23 July 2010; pp. 1–8. [Google Scholar]
- Zhai, D.; Mendel, J.M. Computing the centroid of a general type-2 fuzzy set by means of the centroid-flow algorithm. IEEE Trans. Fuzzy Syst. 2011, 19, 401–422. [Google Scholar] [CrossRef]
- Wagner, C.; Hagras, H. Toward general type-2 fuzzy logic systems based on zSlices. IEEE Trans. Fuzzy Syst. 2010, 18, 637–660. [Google Scholar] [CrossRef]
- Mendel, J.M.; Liu, F.; Zhai, D. α-Plane Representation for Type-2 Fuzzy Sets: Theory and Applications. IEEE Trans. Fuzzy Syst. 2009, 17, 1189–1207. [Google Scholar] [CrossRef]
- Kumbasar, T.; Hagras, H. A self-tuning zSlices-based general type-2 fuzzy PI controller. IEEE Trans. Fuzzy Syst. 2015, 23, 991–1013. [Google Scholar] [CrossRef] [Green Version]
- Sanchez, M.A.; Castro, J.R.; Castillo, O. Formation of general type-2 Gaussian membership functions based on the information granule numerical evidence. In Proceedings of the IEEE Workshop on Hybrid Intelligent Models and Applications (HIMA 2013), Singapore, 16–19 April 2013; pp. 1–6. [Google Scholar]
- Khooban, M.H.; Vafamand, N.; Liaghat, A.; Dragicevic, T. An optimal general type-2 fuzzy controller for Urban Traffic Network. ISA Trans. 2017, 66, 335–343. [Google Scholar] [CrossRef]
- Zhao, T.; Chen, Y.; Dian, S.Y.; Guo, R.; Li, S. General Type-2 Fuzzy Gain Scheduling PID Controller with Application to Power-Line Inspection Robots. Int. J. Fuzzy Syst. 2020, 22, 181–200. [Google Scholar] [CrossRef]
- Zhao, T.; Chen, C.S.; Dian, S.Y. Local stability and stabilization of uncertain nonlinear systems with two additive time-varying delays. Commun. Nonlinear Sci. Numer. Simul. 2020, 83, 105097. [Google Scholar] [CrossRef]
- Zhao, T.; Huang, M.B.; Dian, S.Y. Robust stability and stabilization conditions for nonlinear networked control systems with network-induced delay via TS fuzzy model. IEEE Trans. Fuzzy Syst. 2019, 1. [Google Scholar] [CrossRef]
- Zhao, T.; Huang, M.B.; Dian, S.Y. Stability and stabilization of TS fuzzy systems with two additive time-varying delays. Inf. Sci. 2019, 494, 174–192. [Google Scholar] [CrossRef]
- Mendel, J.M. Uncertain rule-based fuzzy systems. In Introduction and New Directions; Springer International Publishing: Cham, Switzerland, 2017; p. 684. [Google Scholar]
- Mendel, J.M. General type-2 fuzzy logic systems made simple: A tutorial. IEEE Trans. Fuzzy Syst. 2014, 22, 1162–1182. [Google Scholar] [CrossRef]
- Dian, S.; Chen, L.; Hoang, S.; Pu, M.; Liu, J. Dynamic balance control based on an adaptive gain-scheduled backstepping scheme for power-line inspection robots. IEEE/CAA J. Autom. Sin. 2017, 6, 198–208. [Google Scholar] [CrossRef]
- Oustaloup, A.; Levron, F.; Mathieu, B.; Nanot, F.M. Frequency-band complex noninteger differentiator: Characterization and synthesis. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2000, 47, 25–39. [Google Scholar] [CrossRef]
- Wang, L.; Zheng, S.; Wang, X.; Fan, L. Fuzzy control of a double inverted pendulum based on information fusion. In Proceedings of the IEEE International Conference on Intelligent Control and Information Processing 2010, Dalian, China, 13–15 August 2010; pp. 327–331. [Google Scholar]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | (kg) | (kg) | (m) | (m) | d (m) | l (m) |
|---|---|---|---|---|---|---|
| value | 63 | 27 | 0.18 | 0.42 | 0.5 | 0.5 |
| S | M | B | S | M | B | S | M | B | |
|---|---|---|---|---|---|---|---|---|---|
| S | M | S | M | B | S | B | M | B | M |
| M | B | M | B | B | M | B | S | B | S |
| B | M | S | M | M | S | M | M | B | M |
| Controllers Type | Parameters | |||||
|---|---|---|---|---|---|---|
| GT2FO-FPID | 1.88 | 1.76 | 0.66 | 0.01 | 1.01 | 1.15 |
| IT2FO-FPID | 0.01 | 0.01 | 0.50 | 0.01 | 0.80 | 1.25 |
| T1FO-FPID | 2.64 | 0.68 | 0.53 | 0.45 | 0.92 | 0.01 |
| FOPID | 50.01 | 10.00 | 1.00 | 0.80 | 1.30 | 1.30 |
| Performance Index | ||||||||
|---|---|---|---|---|---|---|---|---|
| FOPID | T1FO-FPID | IT2FO-FPID | GT2FO-FPID | FOPID | T1FO-FPID | IT2FO-FPID | GT2FO-FPID | |
| ISE | 0.0425 | 0.0479 | 0.0516 | 0.0443 | 0.0173 | 0.0161 | 0.203 | 0.013 |
| IAE | 0.3185 | 0.332 | 0.2837 | 0.2916 | 0.2302 | 0.1877 | 0.1817 | 0.164 |
| ITAE | 0.5387 | 0.4973 | 0.255 | 0.3453 | 0.4726 | 0.326 | 0.213 | 0.2323 |
| Performance Index | ||||||||
|---|---|---|---|---|---|---|---|---|
| FOPID | T1FO-FPID | IT2FO-FPID | GT2FO-FPID | FOPID | T1FO-FPID | IT2FO-FPID | GT2FO-FPID | |
| ISE | 0.0674 | 0.0677 | 0.0791 | 0.0624 | 0.0293 | 0.0223 | 0.0301 | 0.0170 |
| IAE | 0.5884 | 0.5479 | 0.5188 | 0.4759 | 0.4034 | 0.3211 | 0.3240 | 0.2506 |
| ITAE | 3.4889 | 2.8400 | 2.7343 | 2.2592 | 2.4462 | 1.8743 | 1.7791 | 1.1752 |
| Performance Index | ||||||||
|---|---|---|---|---|---|---|---|---|
| FOPID | T1FO-FPID | IT2FO-FPID | GT2FO-FPID | FOPID | T1FO-FPID | IT2FO-FPID | GT2FO-FPID | |
| ISE | 0.6962 | 0.6483 | 0.7800 | 0.5791 | 0.2877 | 0.1360 | 0.2323 | 0.1218 |
| IAE | 1.6255 | 1.5699 | 1.5518 | 1.3700 | 1.1442 | 0.7570 | 0.9225 | 0.6576 |
| ITAE | 14.7873 | 13.8458 | 13.6874 | 11.7064 | 10.9172 | 6.7755 | 8.4116 | 5.7021 |
| Performance Index | ||||||||
|---|---|---|---|---|---|---|---|---|
| FOPID | T1FO-FPID | IT2FO-FPID | GT2FO-FPID | FOPID | T1FO-FPID | IT2FO-FPID | GT2FO-FPID | |
| ISE | 0.0458 | 0.0524 | 0.0518 | 0.0444 | 0.0198 | 0.0196 | 0.0205 | 0.0130 |
| IAE | 0.4174 | 0.4559 | 0.3045 | 0.3051 | 0.3265 | 0.3113 | 0.2016 | 0.1758 |
| ITAE | 1.9357 | 2.2453 | 0.5391 | 0.5272 | 1.8253 | 2.0714 | 0.4839 | 0.3895 |
| Performance Index | ||||||||
|---|---|---|---|---|---|---|---|---|
| FOPID | T1FO-FPID | IT2FO-FPID | GT2FO-FPID | FOPID | T1FO-FPID | IT2FO-FPID | GT2FO-FPID | |
| ISE | 0.0494 | 0.0566 | 0.0520 | 0.0445 | 0.0224 | 0.0228 | 0.0206 | 0.0131 |
| IAE | 0.4599 | 0.5021 | 0.3120 | 0.3114 | 0.3678 | 0.3575 | 0.2088 | 0.1812 |
| ITAE | 2.5408 | 2.9033 | 0.6438 | 0.6131 | 2.4092 | 2.7289 | 0.5831 | 0.4624 |
| Performance Index | ||||||||
|---|---|---|---|---|---|---|---|---|
| FOPID | T1FO-FPID | IT2FO-FPID | GT2FO-FPID | FOPID | T1FO-FPID | IT2FO-FPID | GT2FO-FPID | |
| ISE | 0.0450 | 0.0506 | 0.0521 | 0.0445 | 0.0181 | 0.0170 | 0.0205 | 0.0130 |
| IAE | 0.4648 | 0.4819 | 0.3488 | 0.3257 | 0.3096 | 0.2711 | 0.2200 | 0.1768 |
| ITAE | 2.8277 | 2.8882 | 1.2784 | 0.8732 | 1.7259 | 1.6870 | 0.8235 | 0.4333 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Zhao, T.; Dian, S.; Zeng, X.; Wang, H. Balance Adjustment of Power-Line Inspection Robot Using General Type-2 Fractional Order Fuzzy PID Controller. Symmetry 2020, 12, 479. https://doi.org/10.3390/sym12030479
Chen Y, Zhao T, Dian S, Zeng X, Wang H. Balance Adjustment of Power-Line Inspection Robot Using General Type-2 Fractional Order Fuzzy PID Controller. Symmetry. 2020; 12(3):479. https://doi.org/10.3390/sym12030479
Chicago/Turabian StyleChen, Yao, Tao Zhao, Songyi Dian, Xiaodong Zeng, and Haipeng Wang. 2020. "Balance Adjustment of Power-Line Inspection Robot Using General Type-2 Fractional Order Fuzzy PID Controller" Symmetry 12, no. 3: 479. https://doi.org/10.3390/sym12030479