Sensor Fusion Based Pipeline Inspection for the Augmented Reality System


Abstract
:1. Introduction
2. Literature Review
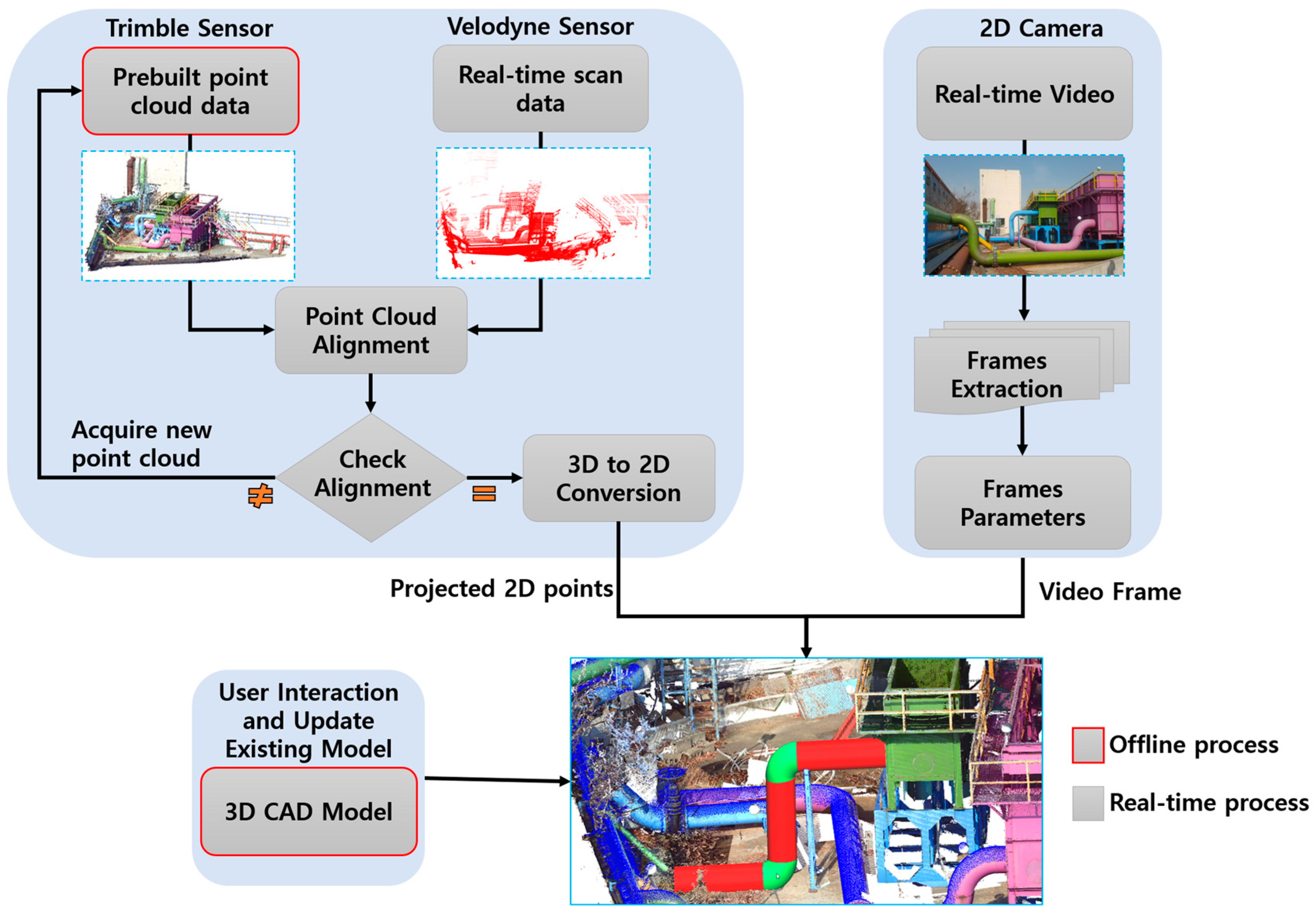
3. Proposed Method
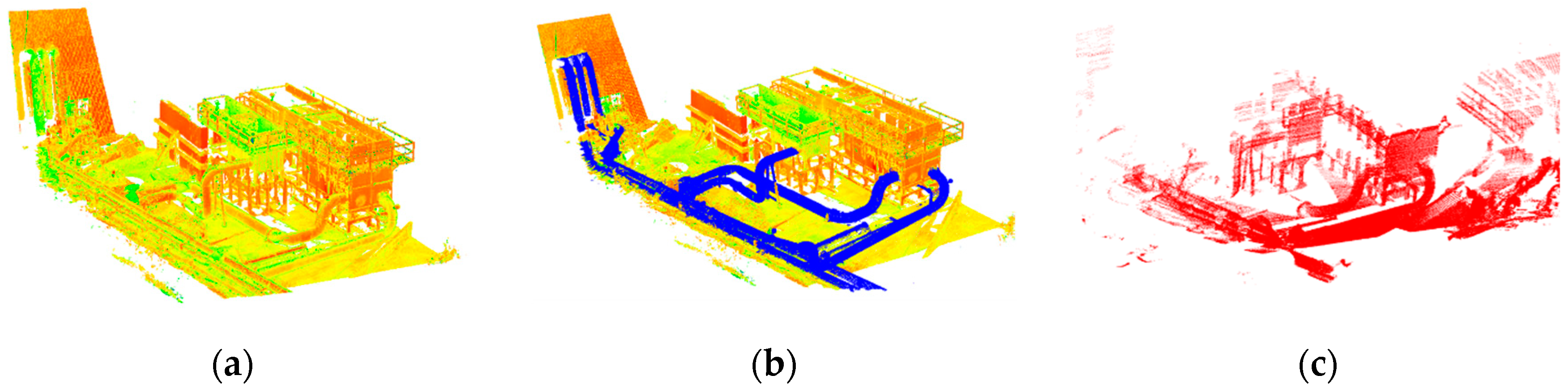
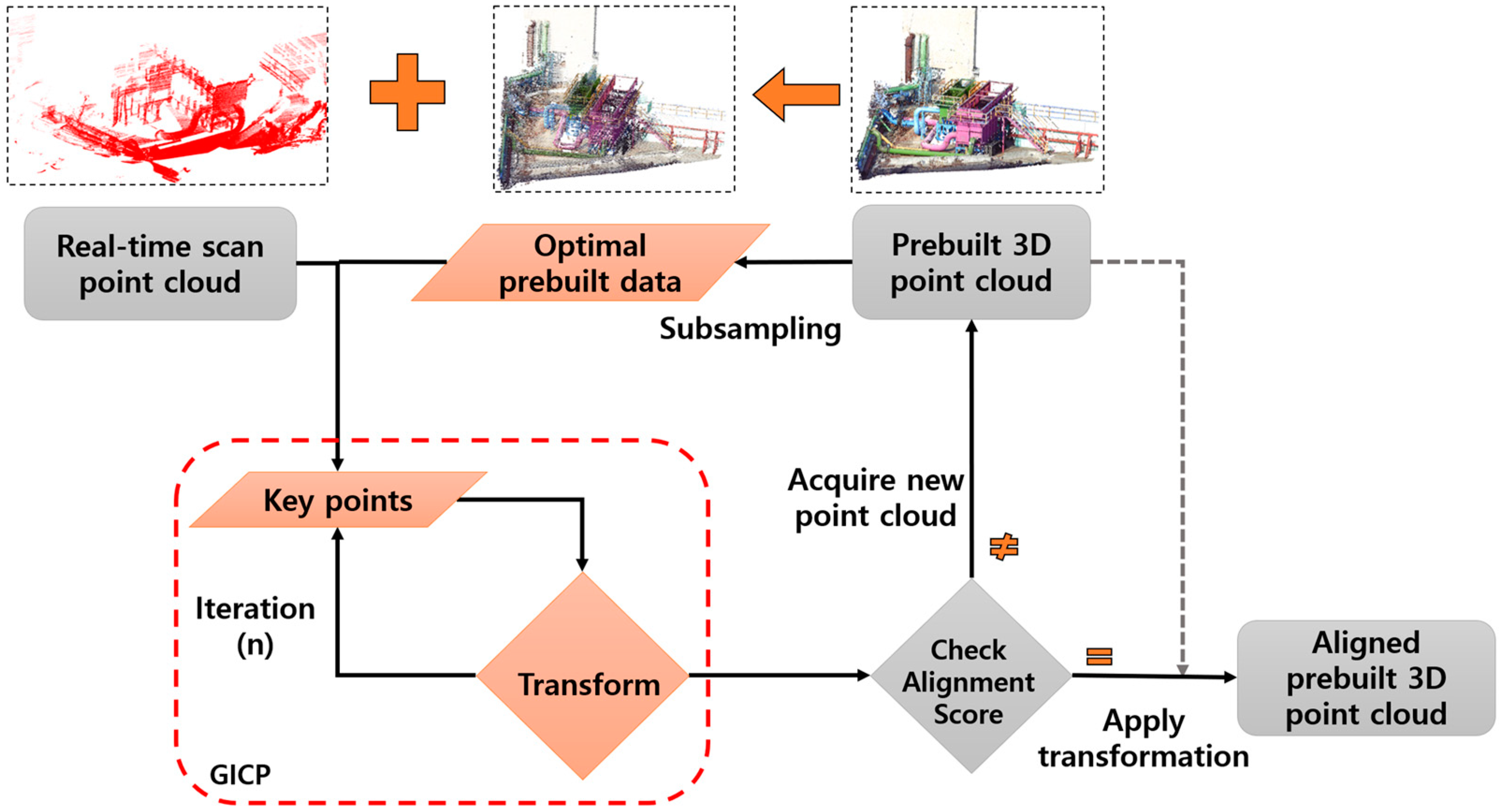
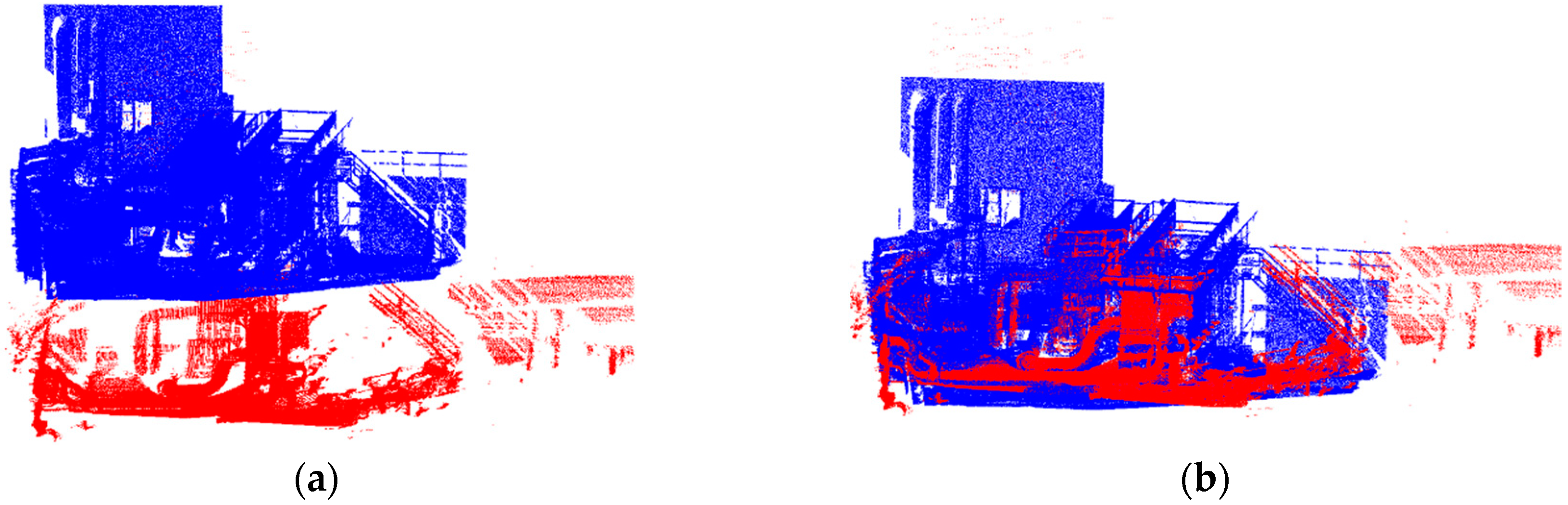
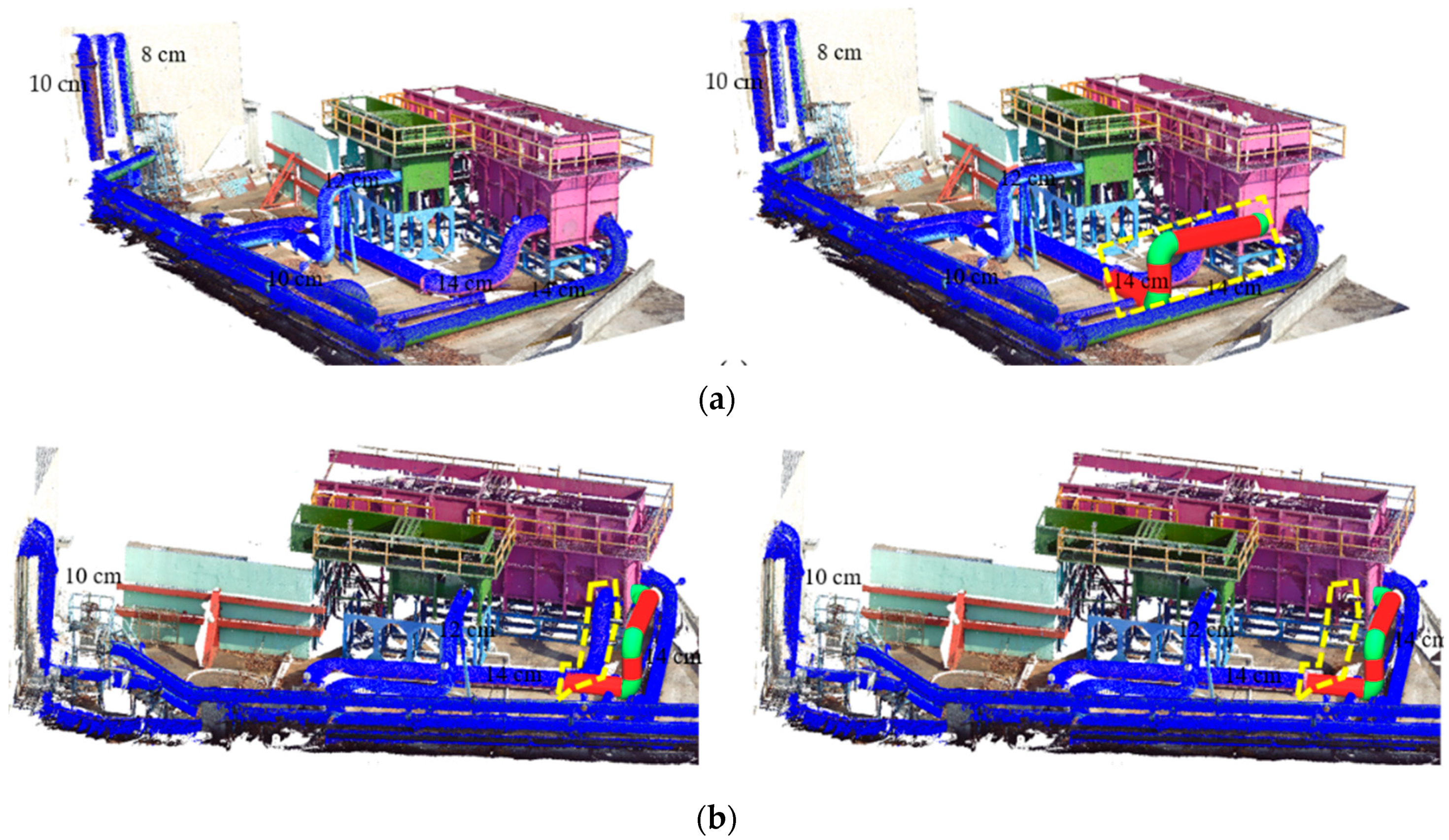
3.1. Real-Time Point Cloud Alignment
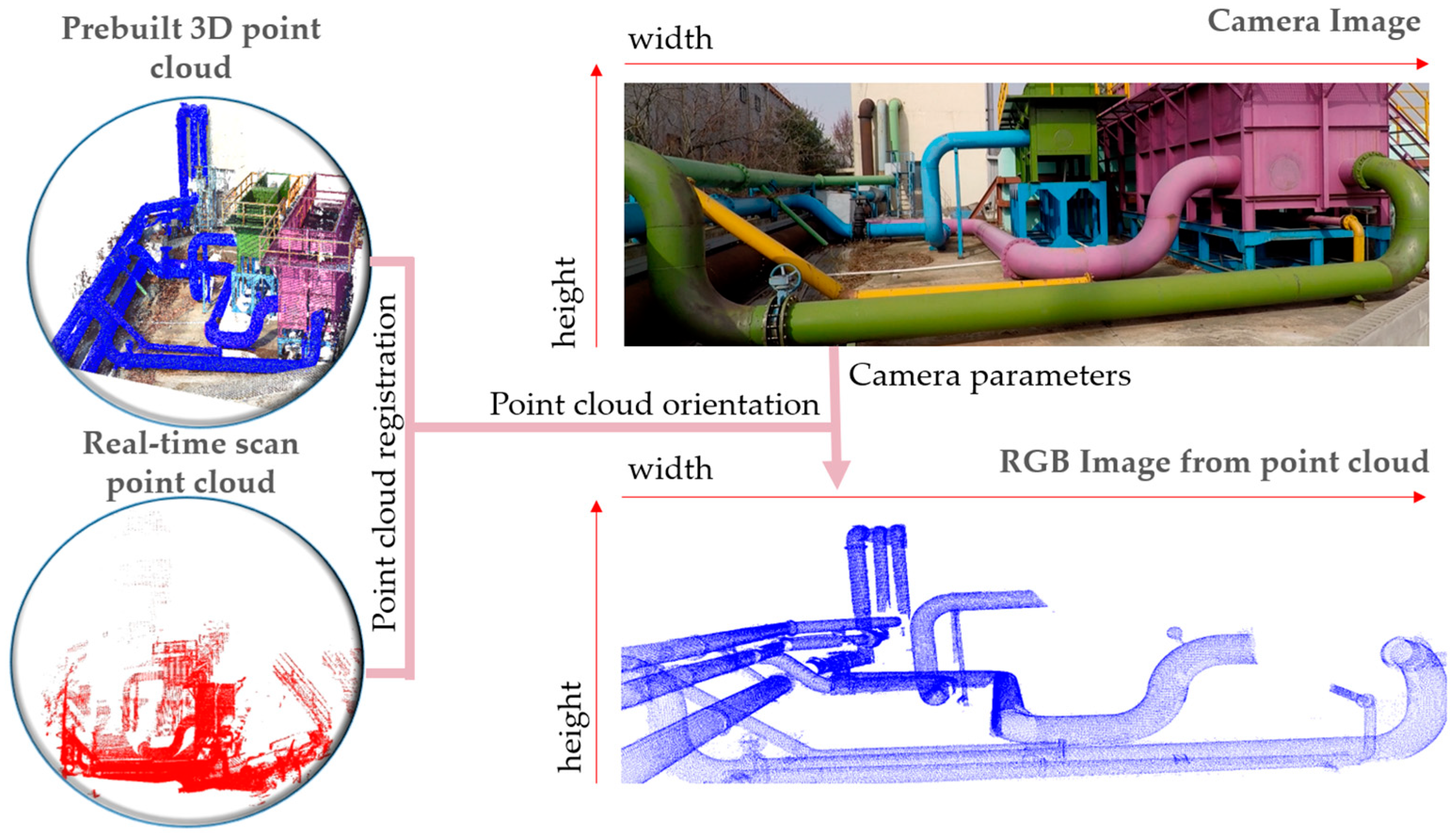
3.2. 3D Point-to-Image Pixel Correspondence
3.2.1. Sensor Calibration and Initial Alignment of Prebuilt Data
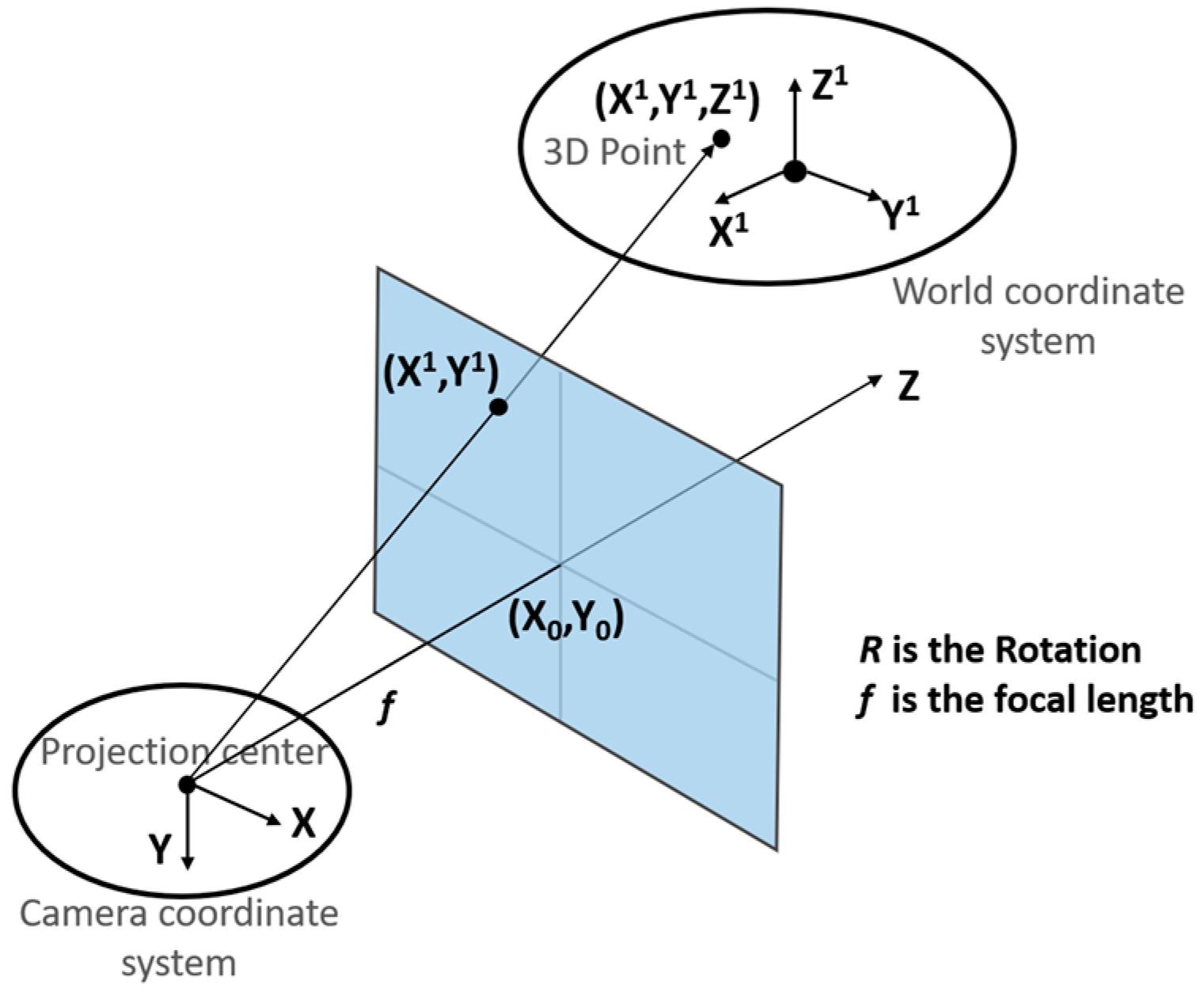
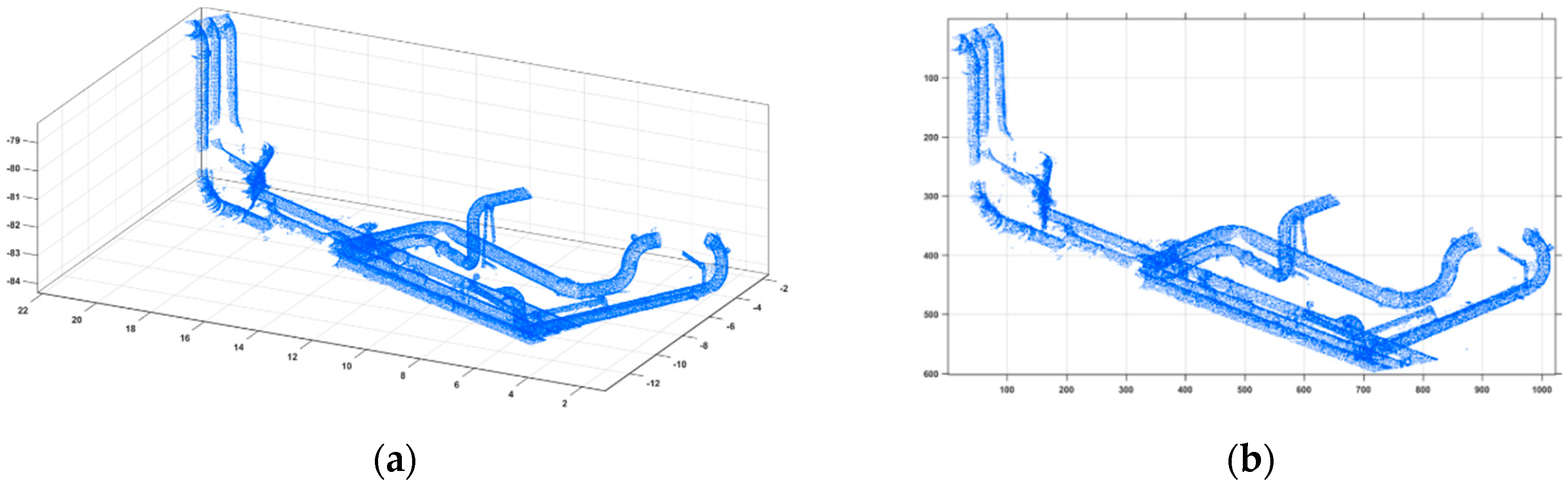
3.2.2. 2D RGB Image from a 3D Point Cloud
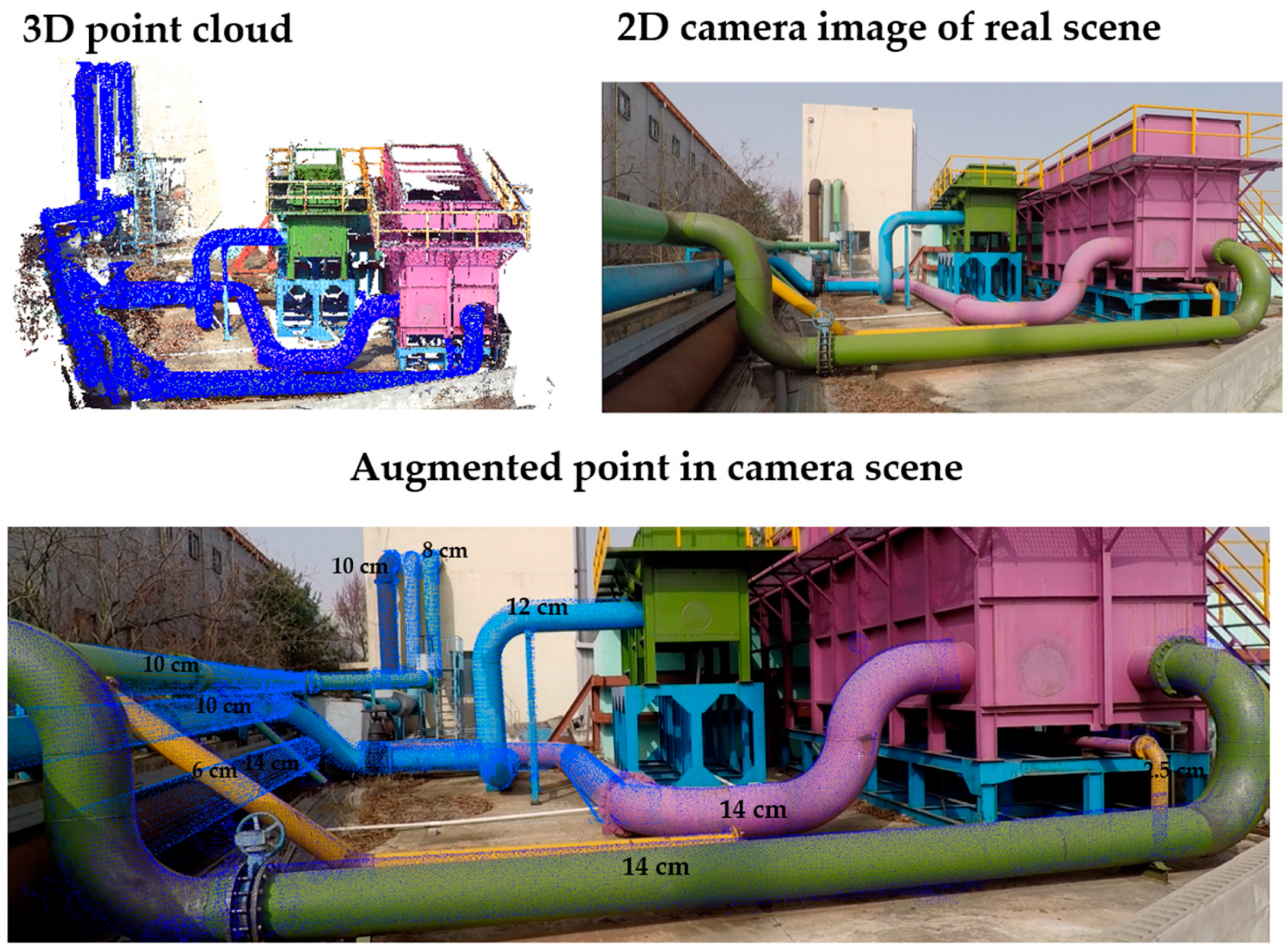
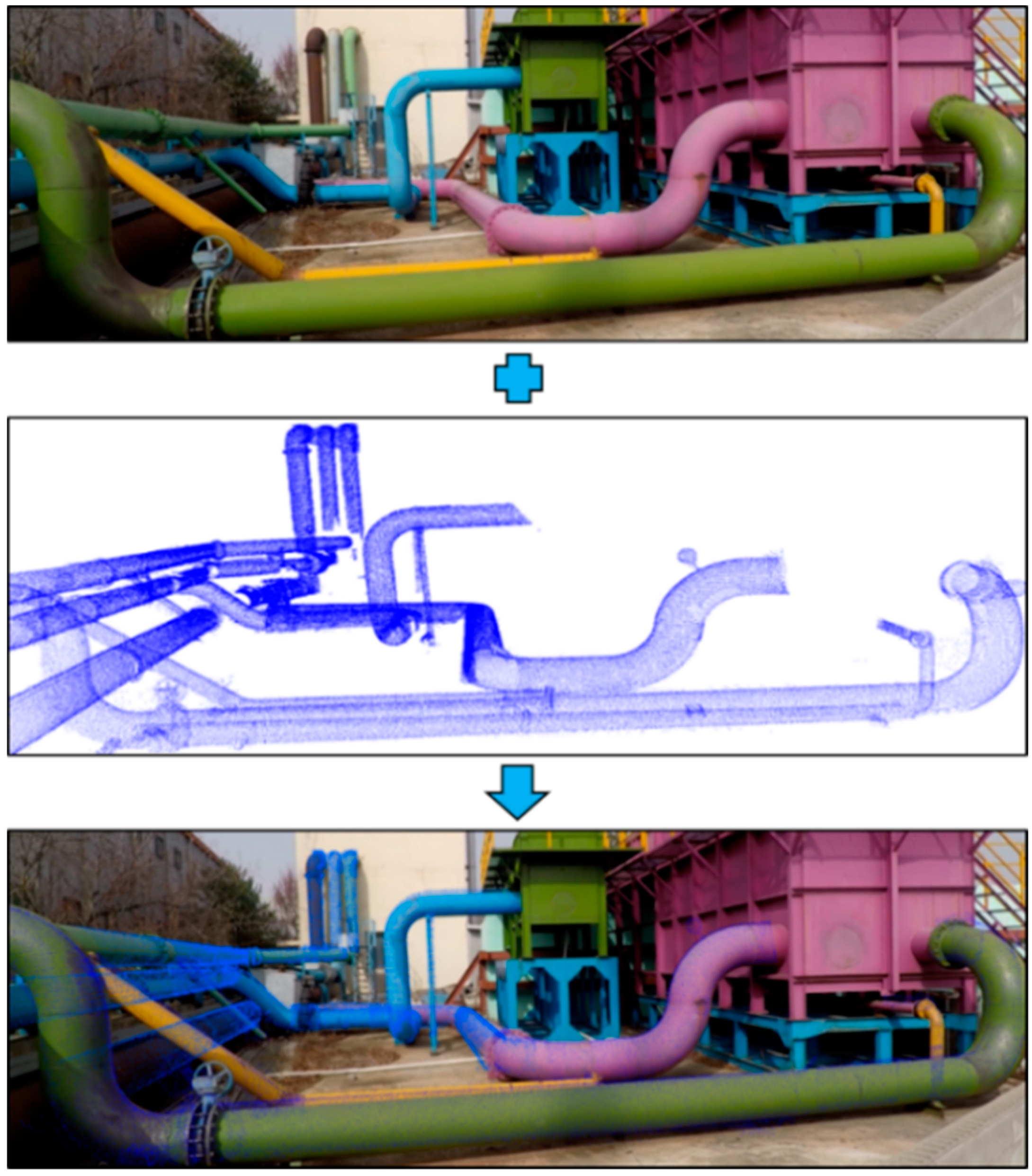
3.2.3. Point Cloud Augmentation in Video
4. Pipeline Retrofitting
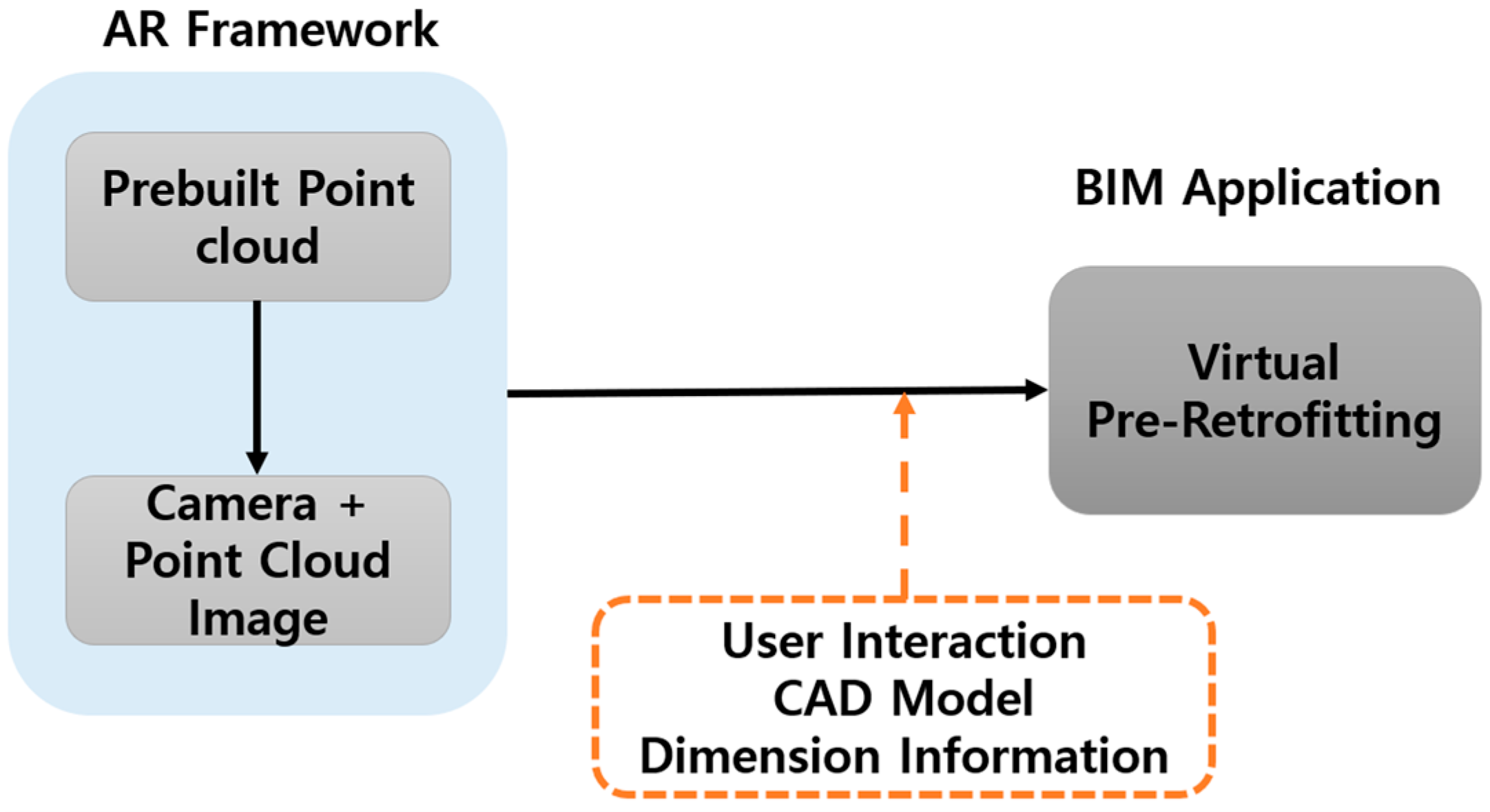
Virtual Pre-Retrofitting
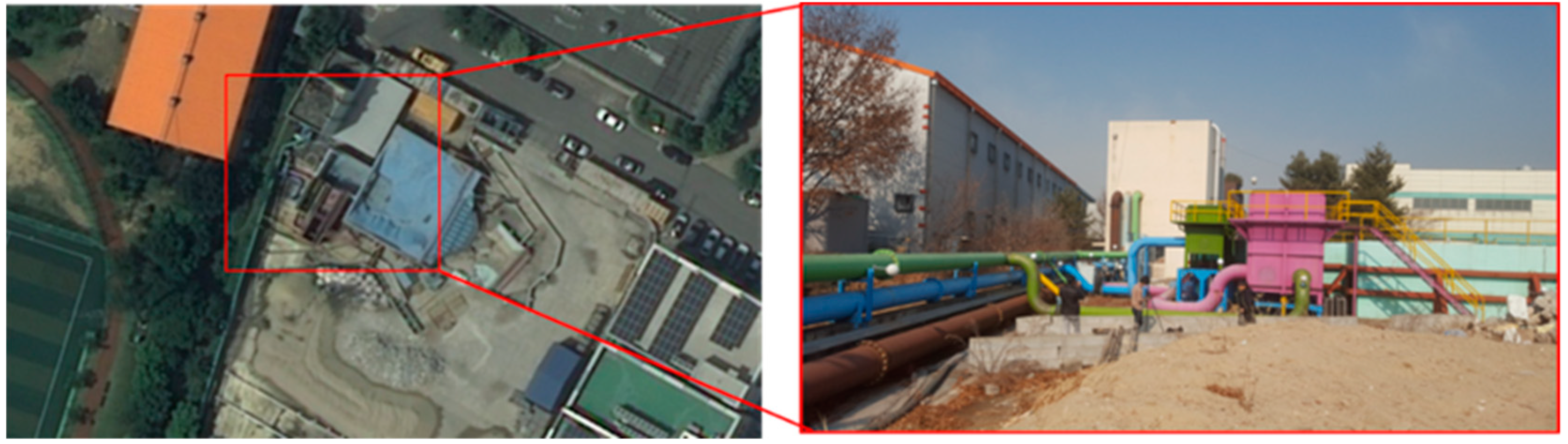
5. Experimental Verification
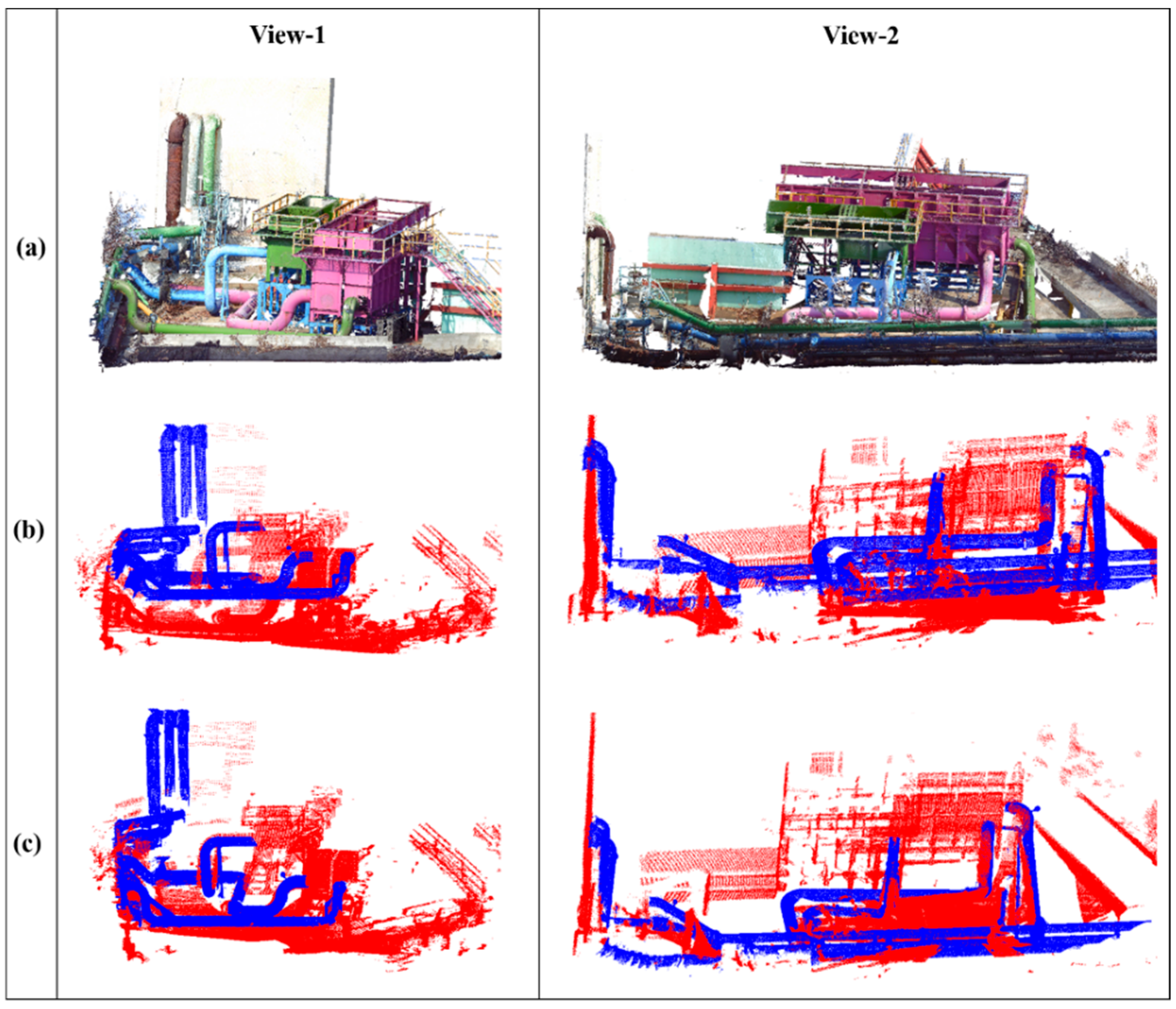
5.1. 3D Point Cloud-Based Registration
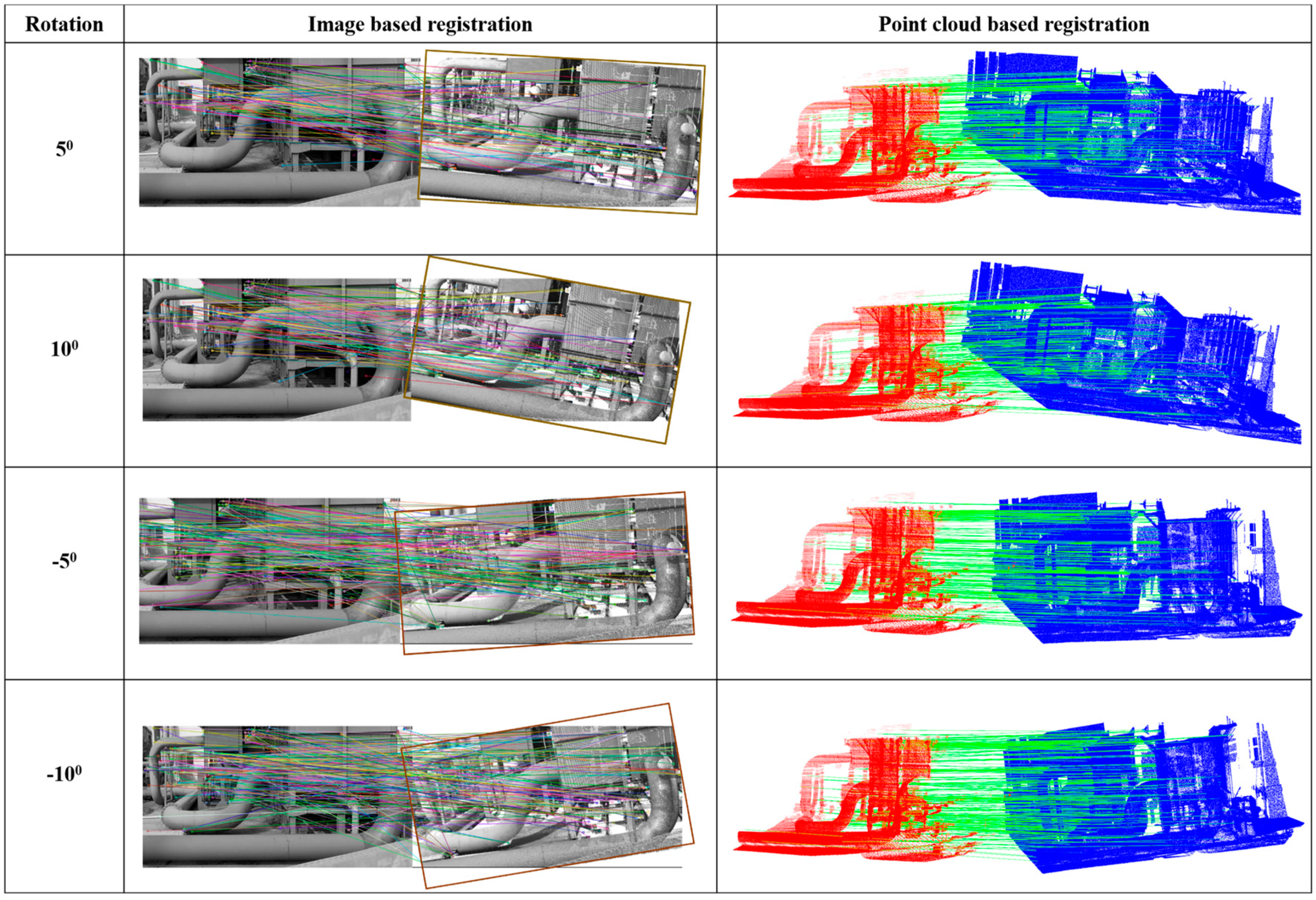
5.2. Comparison with Image-Based Registration
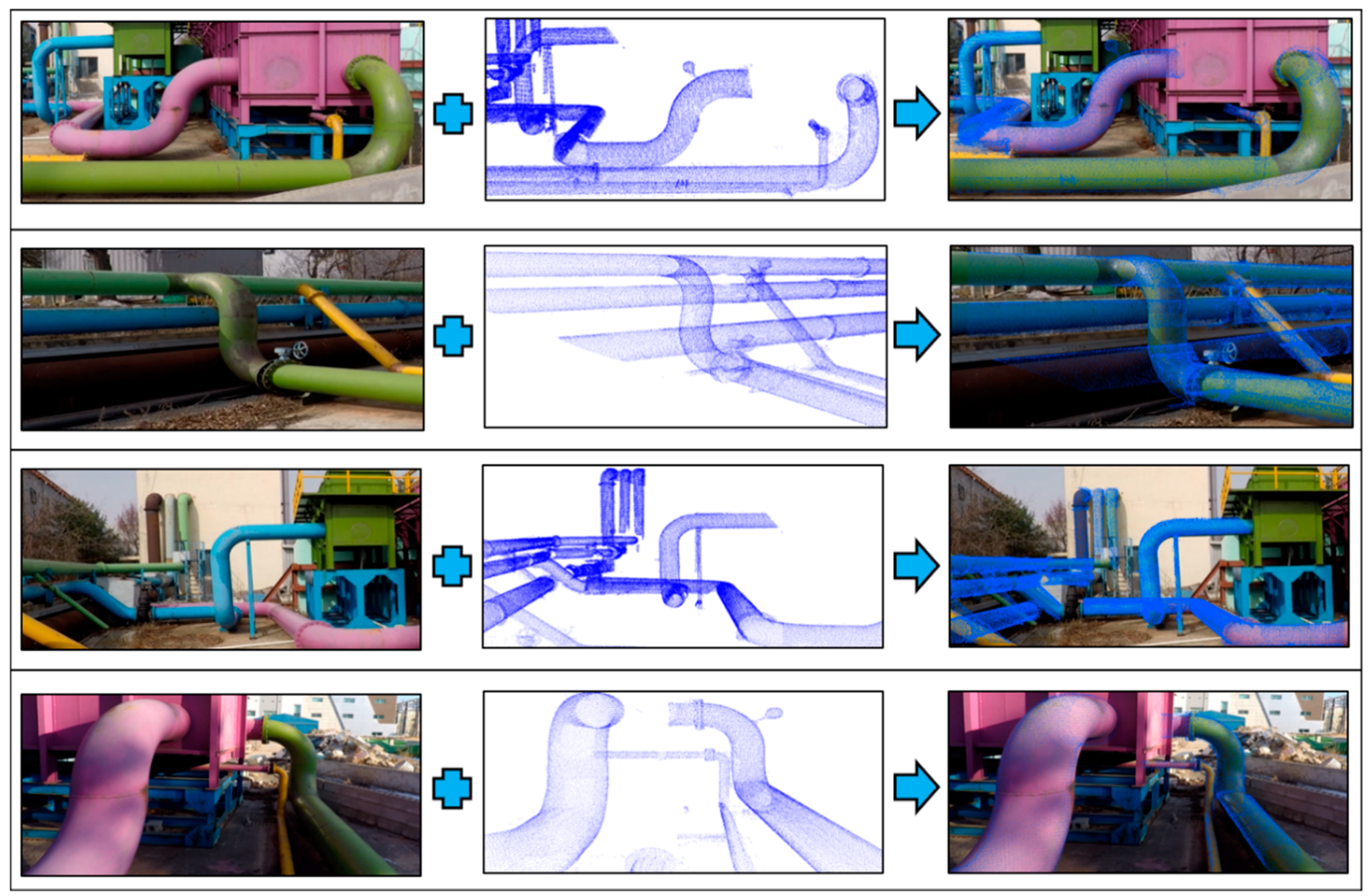
5.3. Point Cloud Alignment in the Video Frames
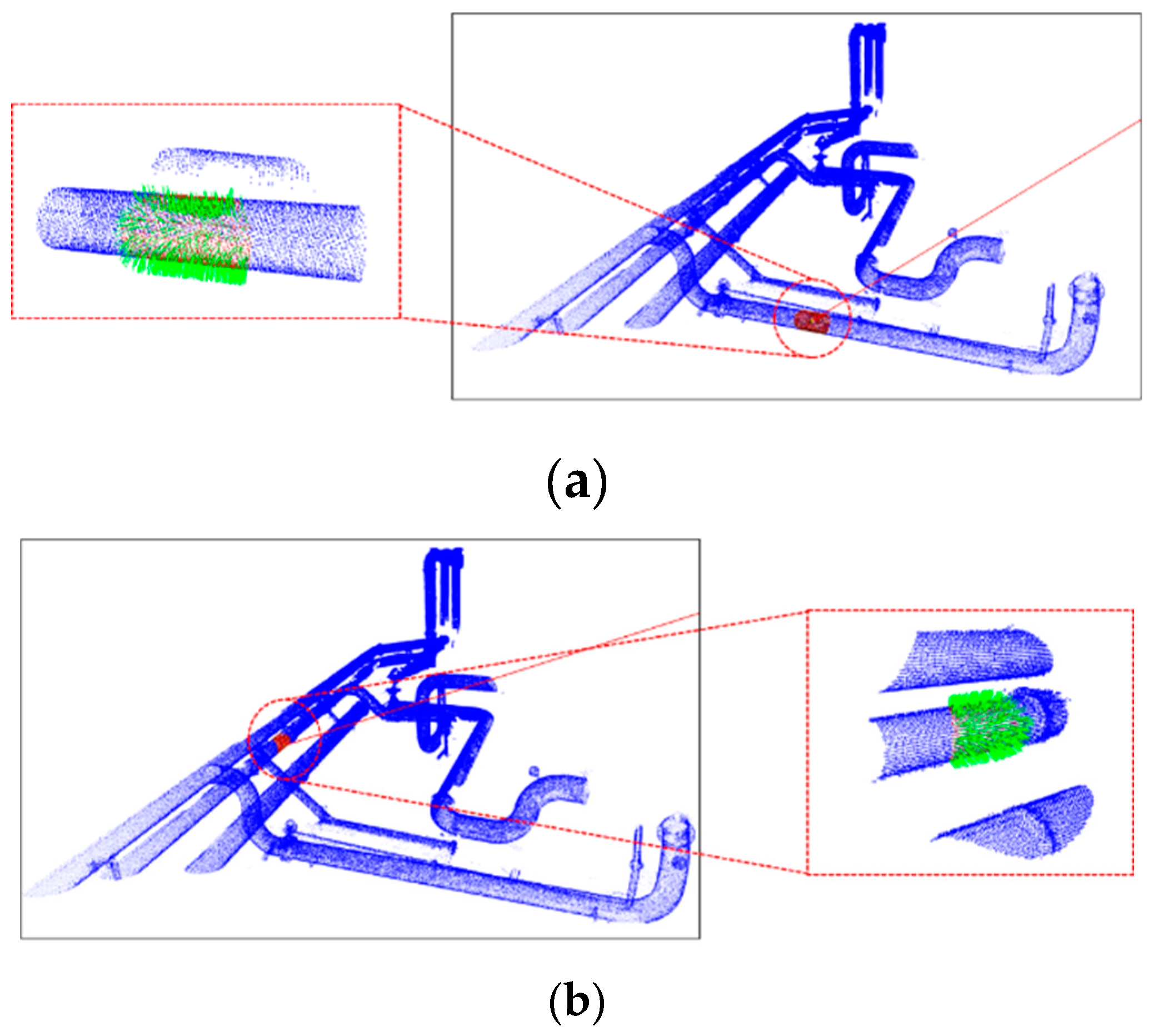
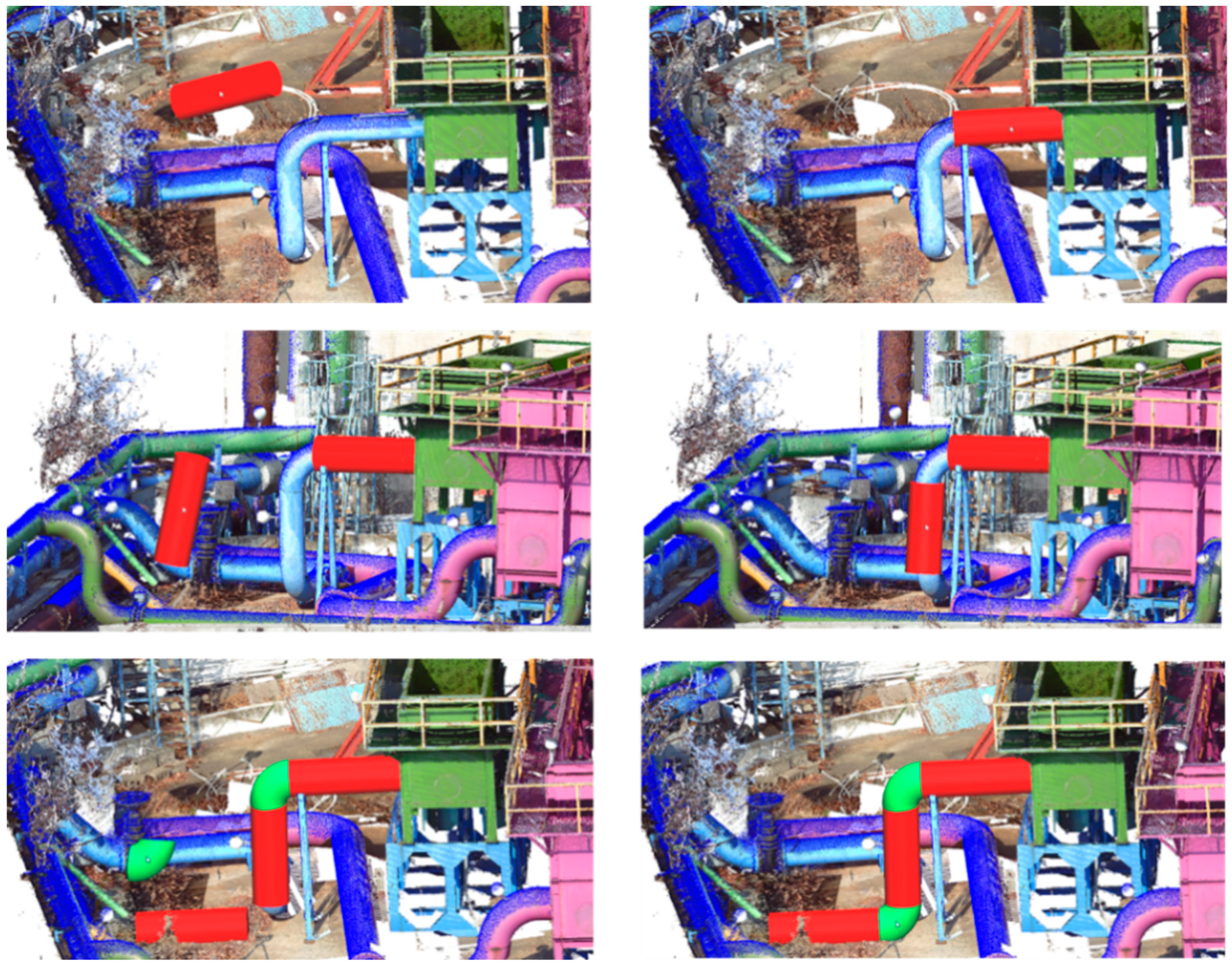
5.4. Pipeline Virtual Retrofitting
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Bui, N.; Merschbrock, C.; Munkvold, B.E. A review of Building Information Modelling for construction in developing countries. Procedia Eng. 2016, 164, 487–494. [Google Scholar] [CrossRef]
- Amiri, R.; Sardroud, J.M.; de Soto, B.G. BIM-based applications of metaheuristic algorithms to support the decision-making process: Uses in the planning of construction site layout. Procedia Eng. 2017, 196, 558–564. [Google Scholar] [CrossRef]
- Sanhudo, L.; Ramos, N.M.; Martins, J.P.; Almeida, R.M.; Barreira, E.; Simões, M.L.; Cardoso, V. Building information modeling for energy retrofitting–A review. Renew. Sustain. Energy Rev. 2018, 89, 249–260. [Google Scholar] [CrossRef]
- Takim, R.; Harris, M.; Nawawi, A.H. Building Information Modeling (BIM): A new paradigm for quality of life within Architectural, Engineering and Construction (AEC) industry. Procedia Soc. Behav. Sci. 2013, 101, 23–32. [Google Scholar] [CrossRef]
- Zhu, Z.; Donia, S. Spatial and visual data fusion for capturing, retrieval, and modeling of as-built building geometry and features. Vis. Eng. 2013, 1, 10. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Truijens, M.; Hou, L.; Wang, Y.; Zhou, Y. Integrating Augmented Reality with Building Information Modeling: Onsite construction process controlling for liquefied natural gas industry. Autom. Constr. 2014, 40, 96–105. [Google Scholar] [CrossRef]
- Park, J.; Kim, B.; Kim, C.; Kim, H. 3D/4D CAD applicability for life-cycle facility management. J. Comput. Civ. Eng. 2011, 25, 129–138. [Google Scholar] [CrossRef]
- Chantawit, D.; Hadikusumo, B.H.; Charoenngam, C.; Rowlinson, S. 4DCAD-Safety: Visualizing project scheduling and safety planning. Constr. Innov. 2005, 5, 99–114. [Google Scholar] [CrossRef]
- Li, X.; Yi, W.; Chi, H.L.; Wang, X.; Chan, A.P. A critical review of virtual and augmented reality (VR/AR) applications in construction safety. Autom. Constr. 2018, 86, 150–162. [Google Scholar] [CrossRef]
- Khalek, I.A.; Chalhoub, J.M.; Ayer, S.K. Augmented reality for identifying maintainability concerns during design. Adv. Civ. Eng. 2019. [Google Scholar] [CrossRef]
- Bae, H.; Golparvar-Fard, M.; White, J. High-precision vision-based mobile augmented reality system for context-aware architectural, engineering, construction and facility management (AEC/FM) applications. Vis. Eng. 2013, 1, 3. [Google Scholar] [CrossRef] [Green Version]
- Toro, C.; Sanín, C.; Vaquero, J.; Posada, J.; Szczerbicki, E. Knowledge based industrial maintenance using portable devices and augmented reality. In Proceedings of the International Conference on Knowledge-Based and Intelligent Information and Engineering Systems, Vietri sul Mare, Italy, 12–14 September 2007; pp. 295–302. [Google Scholar] [CrossRef]
- Wang, X.; Love, P.E.; Kim, M.J.; Park, C.S.; Sing, C.P.; Hou, L. A conceptual framework for integrating building information modeling with augmented reality. Autom. Constr. 2013, 34, 37–44. [Google Scholar] [CrossRef]
- Chu, M.; Matthews, J.; Love, P.E. Integrating mobile Building Information Modelling and Augmented Reality systems: An experimental study. Autom. Constr. 2018, 85, 305–316. [Google Scholar] [CrossRef]
- Doil, F.; Schreiber, W.; Alt, T.; Patron, C. Augmented reality for manufacturing planning. In Proceedings of the Workshop on Virtual Environments 2003, Zurich, Switzerland, 22–23 May 2003; pp. 71–76. [Google Scholar] [CrossRef]
- Tang, A.; Owen, C.; Biocca, F.; Mou, W. Comparative effectiveness of augmented reality in object assembly. In Proceedings of the SIGCHI conference on Human factors in computing systems 2003, Ft. Lauderdale, FL, USA, 5–10 April 2003; pp. 73–80. [Google Scholar] [CrossRef]
- Sanz, A.; González, I.; Castejón, A.J.; Casado, J.L. Using virtual reality in the teaching of manufacturing processes with material removal in CNC machine-tools. In Materials Science Forum; Trans Tech Publications Ltd.: Zurich, Switzerland, 2011; Volume 692, pp. 112–119. [Google Scholar] [CrossRef]
- Tabrizi, A.; Sanguinetti, P. Literature review of augmented reality application in the architecture, engineering, and construction industry with relation to building information. In Advanced Methodologies and Technologies in Engineering and Environmental Science; IGI Global: Hershey, PA, USA, 2019; pp. 61–73. [Google Scholar]
- De Freitas, M.R.; Ruschel, R.C. Augmented reality supporting building assesment in terms of retrofit detection. In Proceedings of the CIB W078 International Conference, Beijing, China, 9–12 October 2013; pp. 1–10. [Google Scholar]
- Gupta, S.; Lohani, B. Augmented reality system using lidar point cloud data for displaying dimensional information of objects on mobile phones. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 153. [Google Scholar] [CrossRef]
- Tam, G.K.; Cheng, Z.Q.; Lai, Y.K.; Langbein, F.C.; Liu, Y.; Marshall, D.; Martin, R.R.; Sun, X.F.; Rosin, P.L. Registration of 3D point clouds and meshes: A survey from rigid to nonrigid. IEEE Trans. Vis. Comput. Graph. 2013, 19, 1199–1217. [Google Scholar] [CrossRef]
- Diao, P.H.; Shih, N.J. BIM-based AR Maintenance System (BARMS) as an intelligent instruction platform for complex plumbing facilities. Appl. Sci. 2019, 9, 1592. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object modelling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Low, K.L. Linear Least-Squares Optimization for Point-To-Plane ICP Surface Registration; Technical Report TR04-004; University of North Carolina: Chapel Hill, NC, USA, 2004. [Google Scholar]
- Alshawa, M. ICL: Iterative closest line A novel point cloud registration algorithm based on linear features. Ekscentar 2007, 10, 53–59. [Google Scholar]
- Segal, A.; Haehnel, D.; Thrun, S. Generalized-ICP. In Proceedings of the Robotics: Science and Systems, Seattle, WA, USA, 28 June–1 July 2009; p. 435. [Google Scholar]
- Patil, A.K.; Kumar, G.A.; Kim, T.H.; Chai, Y.H. Hybrid approach for alignment of a pre-processed three-dimensional point cloud, video, and CAD model using partial point cloud in retrofitting applications. Int. J. Distrib. Sens. Netw. 2018, 14, 1550147718766452. [Google Scholar] [CrossRef]
- Trimble. Available online: http://trl.trimble.com/docushare/dsweb/Get/Document-628869/022504-122_Trimble_TX5_DS_1012_LR.pdf (accessed on 7 October 2019).
- Velodyne LiDAR. Available online: http://velodynelidar.com/vlp-16.html (accessed on 7 October 2019).
- Vitter, J.S. Faster methods for random sampling. Commun. ACM 1984, 27, 703–718. [Google Scholar] [CrossRef] [Green Version]
- Holz, D.; Ichim, A.E.; Tombari, F.; Rusu, R.B.; Behnke, S. Registration with the point cloud library: A modular framework for aligning in 3-d. IEEE Robot. Autom. Mag. 2015, 22, 110–124. [Google Scholar] [CrossRef]
- Vel’as, M.; Španěl, M.; Materna, Z.; Herout, A. Calibration of RGB camera with velodyne lidar. In Proceedings of the 22nd International Conference on Computer Graphics, Visualization and Computer Vision, Plzen, Czech Republic, 2–5 Jun 2014. [Google Scholar]
- MTw Awinda. Available online: https://www.xsens.com/products/mtw-awinda/ (accessed on 7 October 2019).
- Kumar, G.A.; Patil, A.K.; Patil, R.; Park, S.S.; Chai, Y.H. A LiDAR and IMU integrated indoor navigation system for UAVs and its application in real-time pipeline classification. Sensors 2017, 17, 1268. [Google Scholar] [CrossRef] [PubMed]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Iterations | Run Time (s) | Alignment Score 1 | |||
|---|---|---|---|---|---|---|
| View-1 | View-2 | View-1 | View-2 | View-1 | View-2 | |
| GICP | 6 | 5 | 1.04 | 0.630 | 0.023 | 0.037 |
| OGICP | 8 | 8 | 0.18 | 0.097 | 0.021 | 0.032 |
| Scenario | Run Time (s) | Translation/mm | Rotation/° | ||||
|---|---|---|---|---|---|---|---|
| a | 1.913 | −0.012 | 0.040 | 0.00 | 0.000 | 0.000 | −1.344 |
| b | 2.036 | 0.145 | 0.196 | 0.00 | 0.000 | 0.000 | −1.414 |
| c | 1.996 | 0.045 | 0.029 | 0.00 | 0.000 | 0.000 | −0.925 |
| d | 2.035 | 0.105 | 0.329 | 0.00 | 0.000 | 0.000 | −1.098 |
| Scenario | Run Time (s) | Translation/mm | Rotation/° | ||||
|---|---|---|---|---|---|---|---|
| a | 0.189 | −0.045 | 0.329 | 0.324 | 0.055 | 0.057 | −0.177 |
| b | 0.189 | −0.064 | 0.353 | 0.321 | 0.041 | 0.068 | −0.337 |
| c | 0.153 | −0.082 | 0.305 | 0.323 | 0.074 | 0.018 | 0.382 |
| d | 0.183 | −0.039 | 0.319 | 0.324 | 0.078 | −0.017 | 0.812 |
| Scenario | Actual Orientation (°) | Image Registration (°) | Point Cloud Registration (°) |
|---|---|---|---|
| a | +5 | 6.344 | 4.956 |
| b | +10 | 11.414 | 9.871 |
| c | −5 | −5.925 | −4.866 |
| d | −10 | −11.098 | −9.789 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, G.A.; Patil, A.K.; Kang, T.W.; Chai, Y.H. Sensor Fusion Based Pipeline Inspection for the Augmented Reality System. Symmetry 2019, 11, 1325. https://doi.org/10.3390/sym11101325
Kumar GA, Patil AK, Kang TW, Chai YH. Sensor Fusion Based Pipeline Inspection for the Augmented Reality System. Symmetry. 2019; 11(10):1325. https://doi.org/10.3390/sym11101325
Chicago/Turabian StyleKumar, G. Ajay, Ashok Kumar Patil, Tae Wook Kang, and Young Ho Chai. 2019. "Sensor Fusion Based Pipeline Inspection for the Augmented Reality System" Symmetry 11, no. 10: 1325. https://doi.org/10.3390/sym11101325