
Complex Methodology for Spatial Documentation of Geomorphological Changes and Geohazards in the Alpine Environment


Abstract
:1. Introduction
2. Study Area
3. Materials and Methods
- Terrain reconnaissance.
- Stabilization and surveying of fixed points of the geodetic reference network.
- Measurement of GCP coordinates for photogrammetry and TLS.
- Preparatory work and pre-flight preparation.
- Measurement by photogrammetric and TLS methods.
- Control and verification measurement.
3.1. Stabilization and Surveying of the Geodetic Network
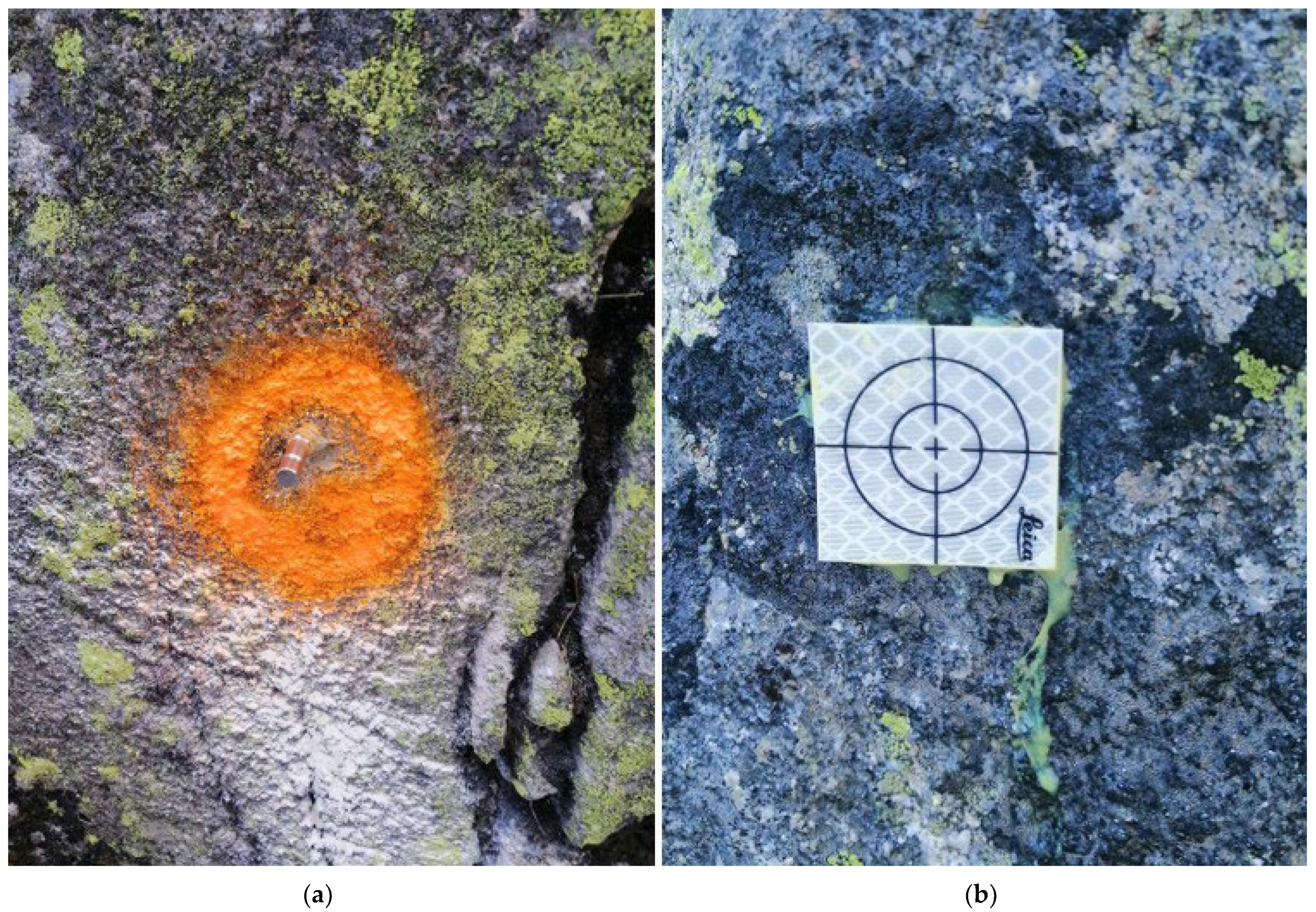
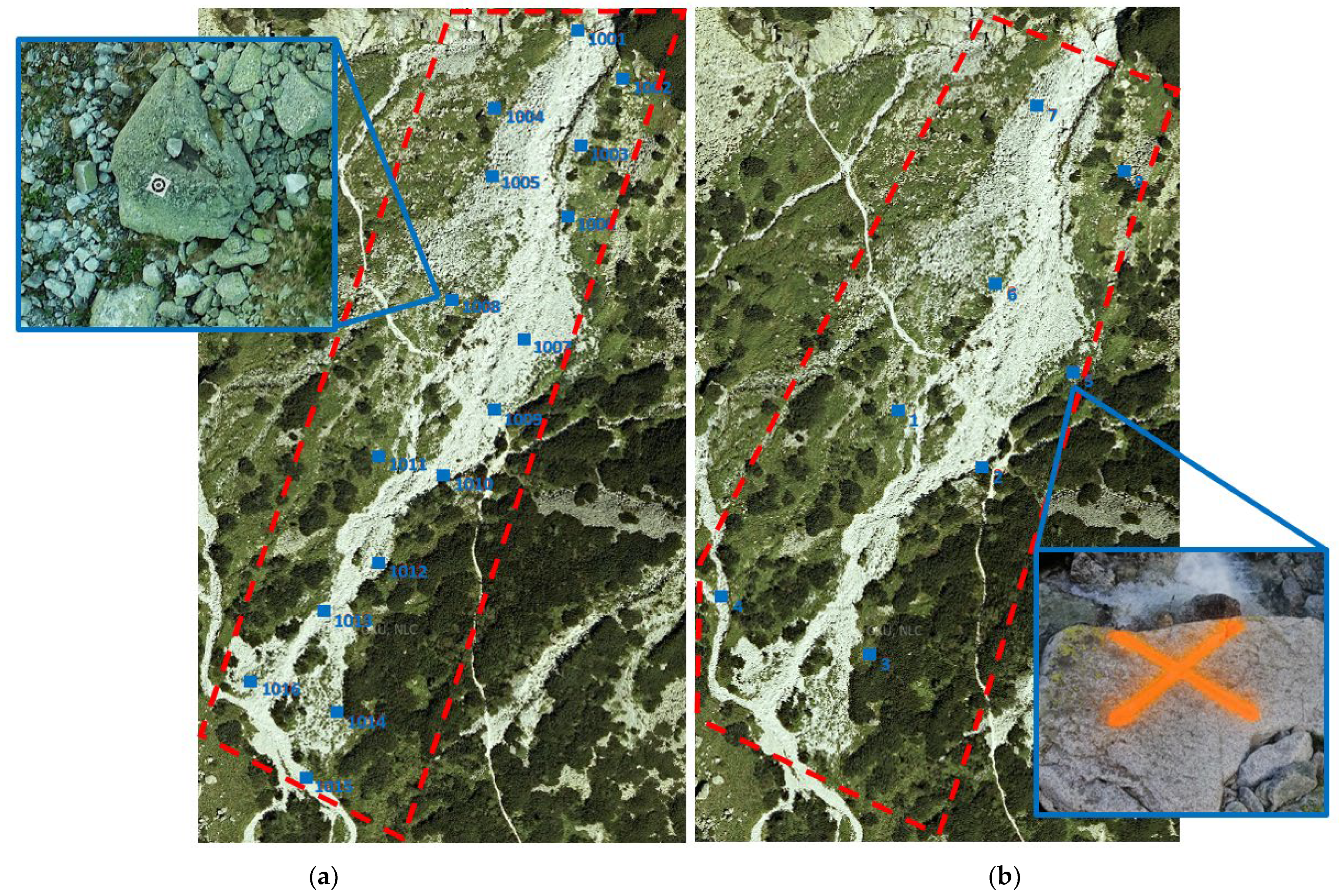
3.2. Surveying of GCP for Photogrammetry and TLS
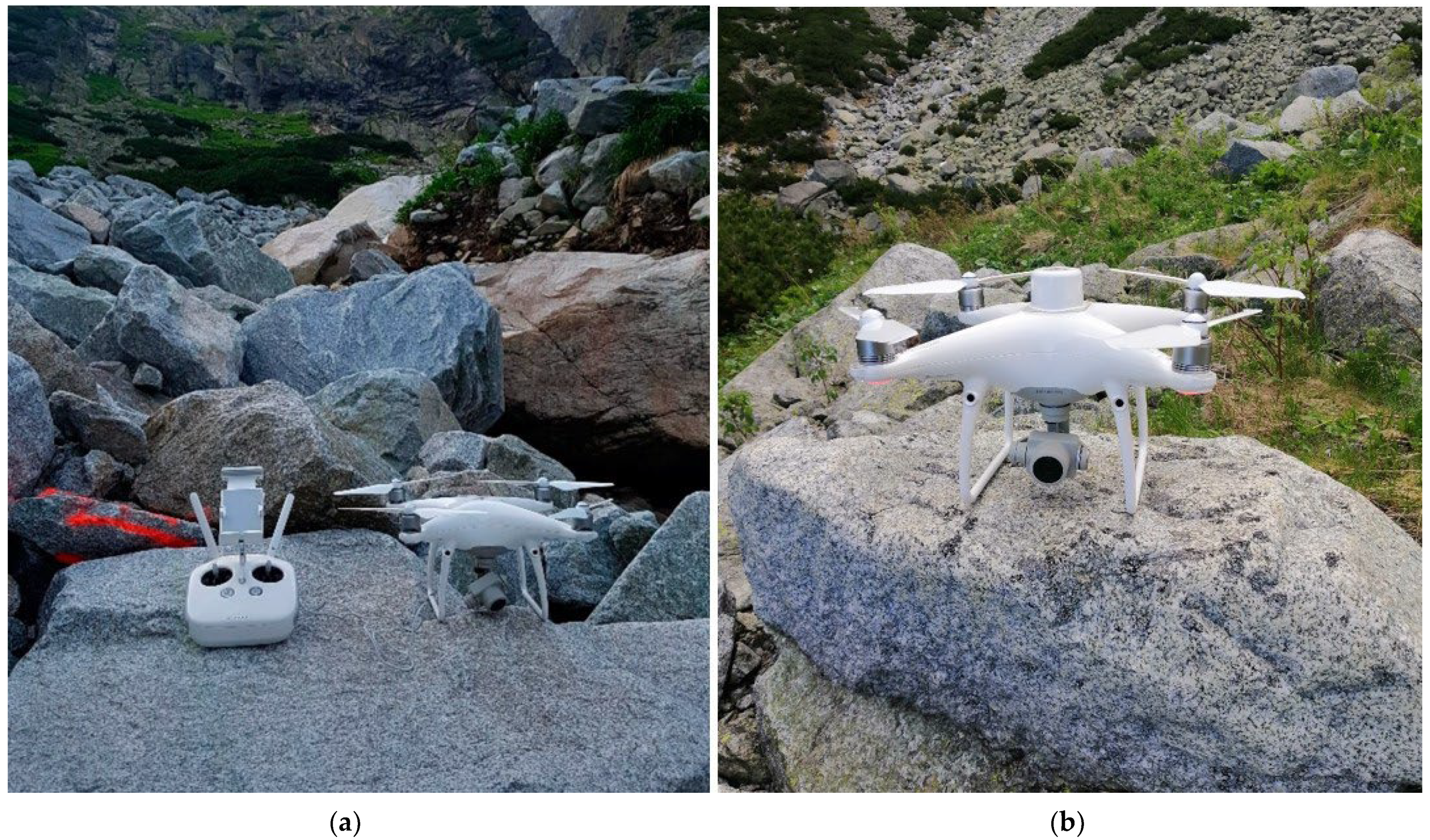
3.3. Measurement by Photogrammetric Methods
3.4. TLS Measurement
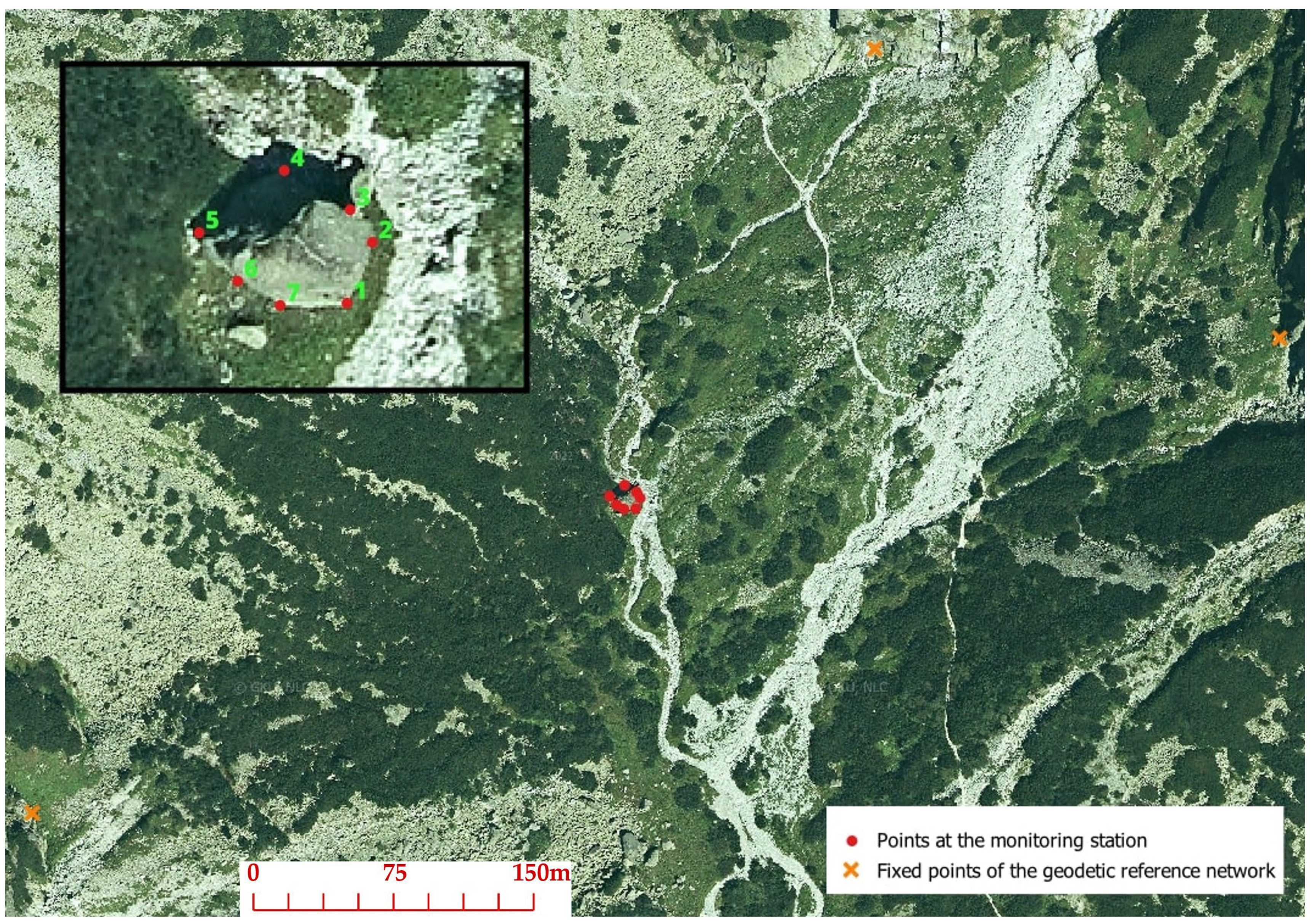
3.5. Establishment of a Monitoring Station
- Precise leveling.
- Spatial polar method with adjustment using Total Station.
- Terrestrial laser scanning.
4. Data Processing
4.1. Photogrammetric Processing
4.2. TLS Data Processing
4.3. ALS Data Processing
5. Results
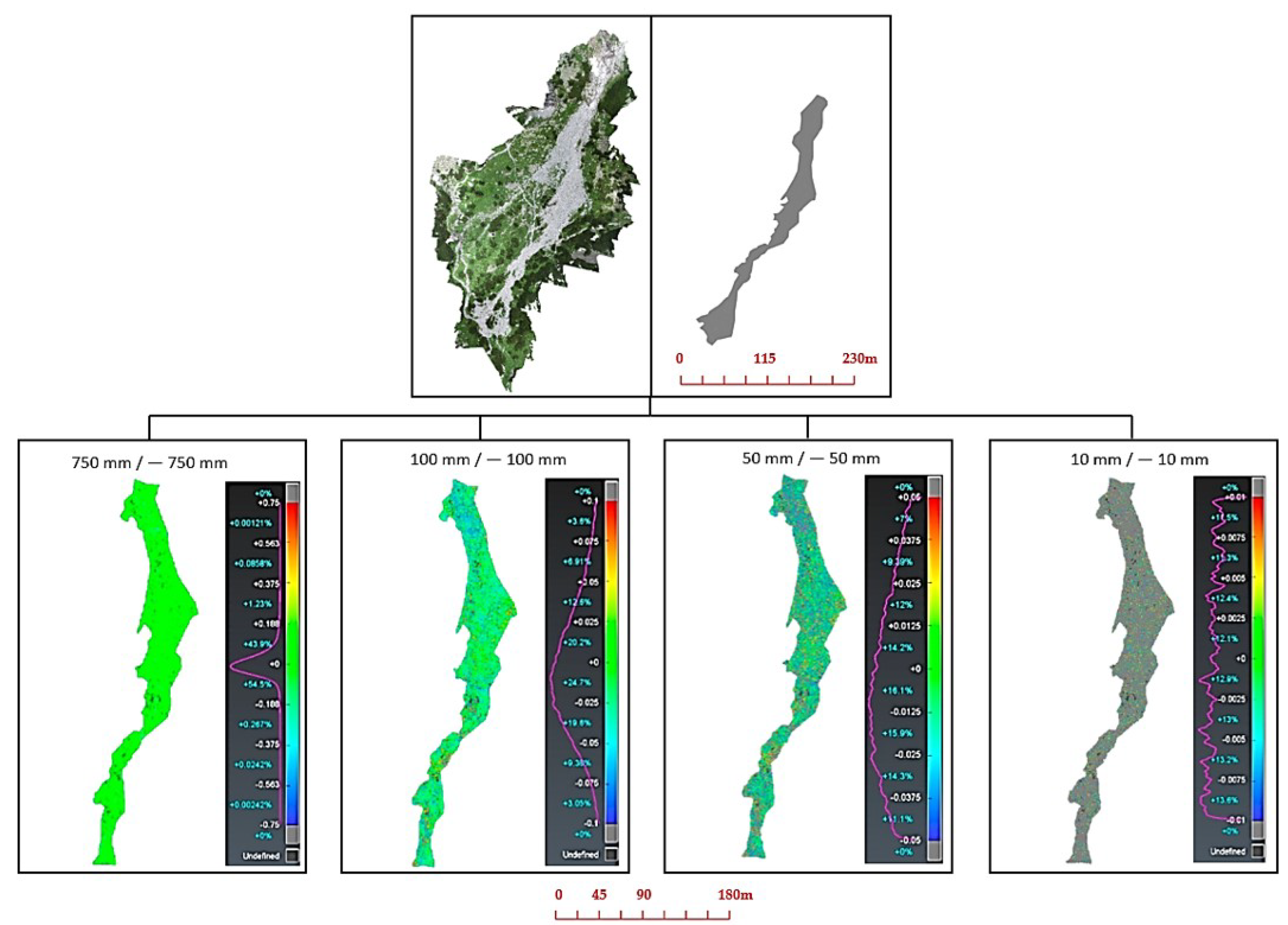
5.1. Comparison of Data from UAS Photogrammetry and TLS in 2018
5.2. Comparison of Data from UAS Photogrammetry and ALS in 2018
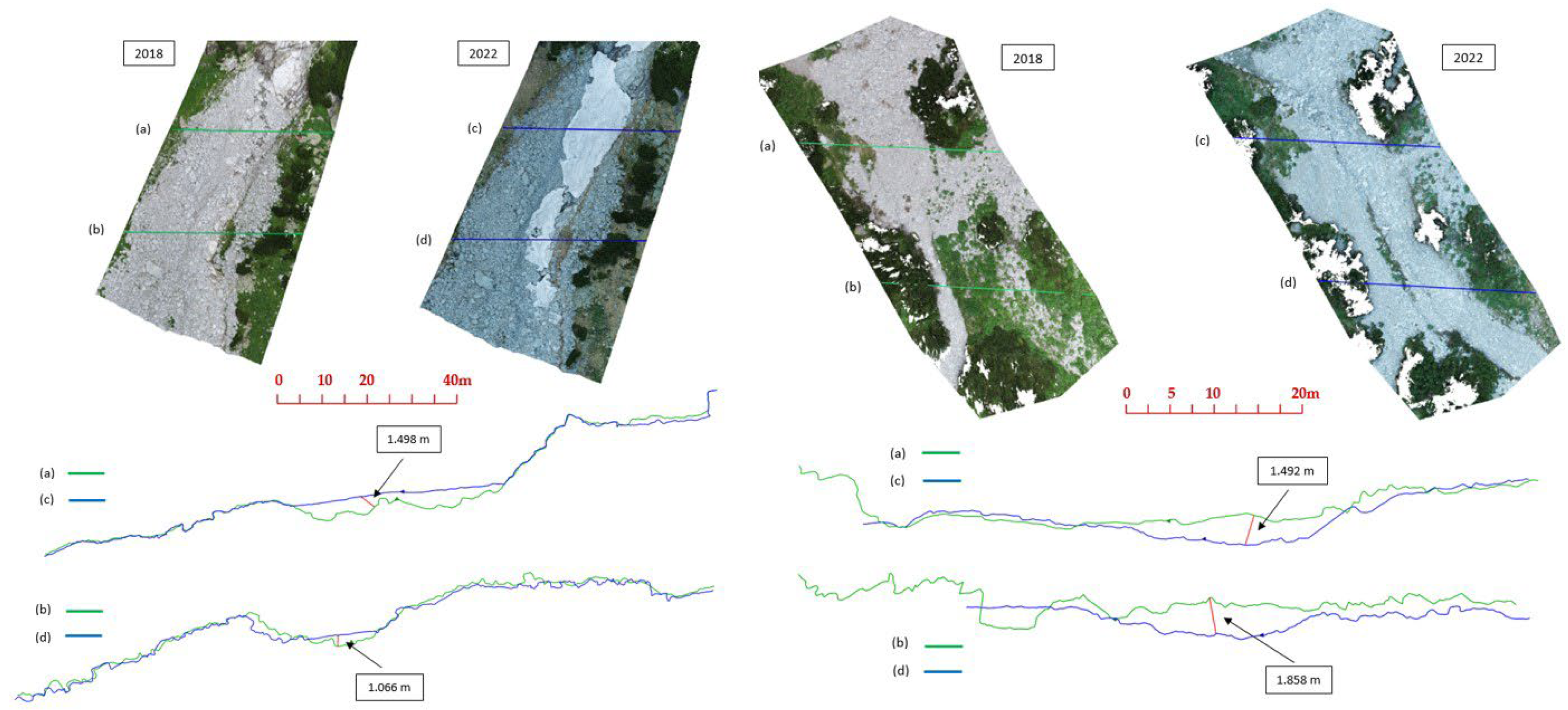
5.3. Comparison of Data from UAS Photogrammetry in Epochs 2018 and 2022
5.4. Monitoring Station: First Findings and Comparisons
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sepúlveda, S.A.; Alfaro, A.; Lara, M.; Carrasco, J.; Olea-Encina, P.; Rebolledo, S.; Garcés, M. An active large rock slide in the Andean paraglacial environment: The Yerba Loca landslide, central Chile. Landslides 2021, 18, 697–705. [Google Scholar] [CrossRef]
- Marčiš, M.; Fraštia, M.; Hideghéty, A.; Paulík, P. Videogrammetric Verification of Accuracy of Wearable Sensors Used in Kiteboarding. Sensors 2021, 21, 8353. [Google Scholar] [CrossRef] [PubMed]
- Tomek, L.; Beran, B.; Erdélyi, J.; Honti, R.; Mikula, K. Multichannel Segmentation of Planar Point Clouds Using Evolving Curves. Comput. Appl. Math. 2023, 42, 332. [Google Scholar] [CrossRef]
- Salach, A.; Bakuła, K.; Pilarska, M.; Ostrowski, W.; Górski, K.; Kurczyński, Z. Accuracy Assessment of Point Clouds from LiDAR and Dense Image Matching Acquired Using the UAV Platform for DTM Creation. ISPRS Int. J. Geo-Inf. 2018, 7, 342. [Google Scholar] [CrossRef]
- Kregar, K.; Marjetič, A.; Savšek, S. TLS-Detectable Plane Changes for Deformation Monitoring. Sensors 2022, 22, 4493. [Google Scholar] [CrossRef] [PubMed]
- Szabó, S.; Enyedi, P.; Horváth, M.; Kovács, Z.; Burai, P.; Csoknyai, T.; Szabó, G. Automated registration of potential locations for solar energy production with Light Detection and Ranging (LiDAR) and small format photogrammetry. J. Clean. Prod. 2016, 112, 3820–3829. [Google Scholar] [CrossRef]
- Hofierka, J.; Gallay, M.; Bandura, P.; Šašak, J. Identification of karst sinkholes in a forested karst landscape using airborne laser scanning data and water flow analysis. Geomorphology 2018, 308, 265–277. [Google Scholar] [CrossRef]
- Fraštia, M.; Liščák, P.; Žilka, A.; Pauditš, P.; Bobáľ, P.; Hronček, S.; Sipina, S.; Ihring, P.; Marčiš, M. Mapping of Debris Flows by the Morphometric Analysis of DTM: A Case Study of the Vrátna Dolina Valley, Slovakia. Geogr. Časopis Geogr. J. 2019, 71, 101–120. [Google Scholar] [CrossRef]
- Blistan, P.; Jacko, S.; Kovanič, Ľ.; Kondela, J.; Pukanská, K.; Bartoš, K. TLS and SfM Approach for Bulk Density Determination of Excavated Heterogeneous Raw Materials. Minerals 2020, 10, 174. [Google Scholar] [CrossRef]
- Osińska-Skotak, K.; Bakuła, K.; Jełowicki, Ł.; Podkowa, A. Using Canopy Height Model Obtained with Dense Image Matching of Archival Photogrammetric Datasets in Area Analysis of Secondary Succession. Remote Sens. 2019, 11, 2182. [Google Scholar] [CrossRef]
- Koska, B.; Křemen, T. The Combination of Laser Scanning and Structure from Motion Technology for Creation of Accurate Exterior and Interior Orthophotos of St. Nicholas Baroque Church. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 133–138. [Google Scholar] [CrossRef]
- Vanneschi, C.; Di Camillo, M.; Aiello, E.; Bonciani, F.; Salvini, R. SfM-MVS Photogrammetry for Rockfall Analysis and Hazard Assessment along the Ancient Roman via Flaminia Road at the Furlo Gorge (Italy). ISPRS Int. J. Geo-Inf. 2019, 8, 325. [Google Scholar] [CrossRef]
- Gomez, C.; Setiawan, M.A.; Listyaningrum, N.; Wibowo, S.B.; Hadmoko, D.S.; Suryanto, W.; Darmawan, H.; Bradak, B.; Daikai, R.; Sunardi, S.; et al. LiDAR and UAV SfM-MVS of Merapi Volcanic Dome and Crater Rim Change from 2012 to 2014. Remote Sens. 2022, 14, 5193. [Google Scholar] [CrossRef]
- Migliazza, M.; Carriero, M.T.; Lingua, A.; Pontoglio, E.; Scavia, C. Rock Mass Characterization by UAV and Close-Range Photogrammetry: A Multiscale Approach Applied along the Vallone dell’Elva Road (Italy). Geosciences 2021, 11, 436. [Google Scholar] [CrossRef]
- Kovanič, L.; Blistan, P.; Rozložník, M.; Szabó, G. UAS RTK/PPK photogrammetry as a tool for mapping the urbanized landscape, creating thematic maps, situation plans and DEM. Acta Montan. Slovaca 2022, 26, 649–660. [Google Scholar] [CrossRef]
- Kovanič, Ľ.; Blistan, P.; Štroner, M.; Urban, R.; Blistanova, M. Suitability of Aerial Photogrammetry for Dump Documentation and Volume Determination in Large Areas. Appl. Sci. 2021, 11, 6564. [Google Scholar] [CrossRef]
- Wen, D.; Su, L.; Hu, Y.; Xiong, Z.; Liu, M.; Long, Y. Surveys of Large Waterfowl and Their Habitats Using an Unmanned Aerial Vehicle: A Case Study on the Siberian Crane. Drones 2021, 5, 102. [Google Scholar] [CrossRef]
- Ajayi, O.G.; Ajulo, J. Investigating the Applicability of Unmanned Aerial Vehicles (UAV) Photogrammetry for the Estimation of the Volume of Stockpiles. Quaest. Geogr. 2021, 40, 25–38. [Google Scholar] [CrossRef]
- Bakuła, K.; Pilarska, M.; Salach, A.; Kurczyński, Z. Detection of Levee Damage Based on UAS Data—Optical Imagery and LiDAR Point Clouds. ISPRS Int. J. Geo-Inf. 2020, 9, 248. [Google Scholar] [CrossRef]
- Pavelka, K.; Matoušková, E.; Pavelka, K., Jr. Remarks on Geomatics Measurement Methods Focused on Forestry Inventory. Sensors 2023, 23, 7376. [Google Scholar] [CrossRef]
- Kovanič, Ľ.; Topitzer, B.; Peťovský, P.; Blišťan, P.; Gergeľová, M.B.; Blišťanová, M. Review of Photogrammetric and Lidar Applications of UAV. Appl. Sci. 2023, 13, 6732. [Google Scholar] [CrossRef]
- Braun, J.; Braunová, H.; Suk, T.; Michal, O.; Pěťovský, P.; Kurič, I. Structural and Geometrical Vegetation Filtering—Case Study on Mining Area Point Cloud Acquired by UAV Lidar. Acta Montan. Slovaca 2022, 26, 661–674. [Google Scholar]
- Matoušková, E.; Pavelka, K.; Smolík, T.; Pavelka, K., Jr. Earthen Jewish Architecture of Southern Morocco: Documentation of Unfired Brick Synagogues and Mellahs in the Drâa-Tafilalet Region. Appl. Sci. 2021, 11, 1712. [Google Scholar] [CrossRef]
- Available online: https://www.europeandataportal.eu (accessed on 22 August 2023).
- Kyriou, A.; Nikolakopoulos, K.; Koukouvelas, I.; Lampropoulou, P. Repeated UAV Campaigns, GNSS Measurements, GIS, and Petrographic Analyses for Landslide Mapping and Monitoring. Minerals 2021, 11, 300. [Google Scholar] [CrossRef]
- Guan, S.; Fukami, K.; Matsunaka, H.; Okami, M.; Tanaka, R.; Nakano, H.; Sakai, T.; Nakano, K.; Ohdan, H.; Takahashi, K. Assessing Correlation of High-Resolution NDVI with Fertilizer Application Level and Yield of Rice and Wheat Crops Using Small UAVs. Remote Sens. 2019, 11, 112. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Seidl, J.; Reindl, T.; Brouček, J. Photogrammetry Using UAV-Mounted GNSS RTK: Georeferencing Strategies without GCPs. Remote Sens. 2021, 13, 1336. [Google Scholar] [CrossRef]
- Forlani, G.; Dall’Asta, E.; Diotri, F.; Cella, U.M.d.; Roncella, R.; Santise, M. Quality Assessment of DSMs Produced from UAV Flights Georeferenced with On-Board RTK Positioning. Remote Sens. 2018, 10, 311. [Google Scholar] [CrossRef]
- Zeybek, M. Accuracy assessment of direct georeferencing UAV images with on-board global navigation satellite system and comparison of CORS/RTK surveying methods. Meas. Sci. Technol. 2021, 32, 065402. [Google Scholar] [CrossRef]
- Braun, J.; Kremen, T.; Pruska, J. Micronetwork for Shift Determinations of the New Type Point Stabilization. In Proceedings of the 2018 Baltic Geodetic Congress (BGC Geomatics), Olsztyn, Poland, 21–23 June 2018; pp. 265–269. [Google Scholar] [CrossRef]
- Pirti, A.; Hosbas, R.G. Evaluation of some levelling techniques in surveying application. Geod. Cartogr. 2019, 68, 361–373. [Google Scholar] [CrossRef]
- Guevara Lima, J.R.; González Giraldo, S.M.; Sánchez Cárdenas, J.S. Methodological Proposal to Correct and Adjust a Geodesic Leveling Data. Tecciencia 2019, 14, 27. [Google Scholar] [CrossRef]
- Santos, D.P.D.; Faggion, P.L.; Veiga, L.A.K. Camapuã Hill altitude determination from leap-frog trigonometric leveling method. Bol. De Ciências Geodésicas 2011, 17, 295–316. [Google Scholar] [CrossRef]
- Lukniš, M. Reliéf Vysokých Tatier a Ich Predpolia; Vydavateľstvo SAV: Bratislava, Slovakia, 1973. [Google Scholar]
- Bohuš, I. Od A po Z o názvoch Vysokých Tatier, 1st ed.; ŠL TANAPu: Tatranská Lomnica, Slovakia, 1996; ISBN 80-967522-7-8. [Google Scholar]
- Radwańska-Parysky, Z.; Paryski, W.H. Wielka Encyklopedia Tatrzańska; Wydawnictwo Górskie: Poronin, Poland, 2004; ISBN 83-7104-009-1. [Google Scholar]
- Fauna na území TANAP-u. Tatranský Národný Park. Available online: https://www.tanap.sk/priroda/fauna-3/ (accessed on 22 August 2023).
- Černík, A.; Sekyra, J. Zeměpis Velehor; Academia: Prague, Czech Republic, 1969; 396p. [Google Scholar]
- Midriak, R. Morfogenéza Povrchu Vysokých Pohorí; VEDA: Bratislava, Slovakia, 1983; 516p. [Google Scholar]
- Available online: https://www.geotech.sk/downloads/Totalne-stanice/FlexLine_TS02_Datasheet_en.pdf (accessed on 24 November 2023).
- Available online: https://www.geotech.sk/downloads/Totalne-stanice/FlexLine_TS06_Datasheet_en.pdf (accessed on 24 November 2023).
- Available online: https://www.dji.com/sk/phantom-4-pro-v2/specs (accessed on 24 November 2023).
- Available online: https://enterprise.dji.com/phantom-4-rtk/specs (accessed on 24 November 2023).
- Available online: https://www.geotech.sk/downloads/Laserove-skenery-HDS/Leica%20ScanStation%20P30-P40%20FLY%200215_SK_PLANT2_fieldView.pdf (accessed on 24 November 2023).
- Available online: https://www.geotech.sk/downloads/Nivelacne%20pristroje/Geodeticke/Nivelacny-pristroj-digitalny-DNA-prospekt_EN.pdf (accessed on 24 November 2023).
- Available online: https://www.geotech.sk/downloads/Laserove-skenery-HDS/Leica_RTC360_sk2.pdf (accessed on 24 November 2023).
- Available online: https://www.geoportal.sk/sk/zbgis/lls/ (accessed on 27 November 2023).
- Urban, R.; Štroner, M.; Blistan, P.; Kovanič, Ľ.; Patera, M.; Jacko, S.; Ďuriška, I.; Kelemen, M.; Szabo, S. The Suitability of UAS for Mass Movement Monitoring Caused by Torrential Rainfall—A Study on the Talus Cones in the Alpine Terrain in High Tatras, Slovakia. ISPRS Int. J. Geo-Inf. 2019, 8, 317. [Google Scholar] [CrossRef]
- Kovanič, Ľ.; Blistan, P.; Urban, R.; Štroner, M.; Blišťanová, M.; Bartoš, K.; Pukanská, K. Analysis of the Suitability of High-Resolution DEM Obtained Using ALS and UAS (SfM) for the Identification of Changes and Monitoring the Development of Selected Geohazards in the Alpine Environment—A Case Study in High Tatras, Slovakia. Remote Sens. 2020, 12, 3901. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Línková, L. Multidirectional Shift Rasterization (MDSR) Algorithm for Effective Identification of Ground in Dense Point Clouds. Remote Sens. 2022, 14, 4916. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Suk, T. Filtering Green Vegetation Out from Colored Point Clouds of Rocky Terrains Based on Various Vegetation Indices: Comparison of Simple Statistical Methods, Support Vector Machine, and Neural Network. Remote Sens. 2023, 15, 3254. [Google Scholar] [CrossRef]
- Kovanič, Ľ.; Štroner, M.; Urban, R.; Blišťan, P. Methodology and Results of Staged UAS Photogrammetric Rockslide Monitoring in the Alpine Terrain in High Tatras, Slovakia, after the Hydrological Event in 2022. Land 2023, 12, 977. [Google Scholar] [CrossRef]
- Szypuła, B. Accuracy of UAV-Based DEMs without Ground Control Points. GeoInformatica 2023, 28, 1–28. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Křemen, T.; Braun, J. UAV DTM Acquisition in a Forested Area—Comparison of Low-Cost Photogrammetry (DJI Zenmuse P1) and LiDAR Solutions (DJI Zenmuse L1). Eur. J. Remote Sens. 2023, 56. [Google Scholar] [CrossRef]
- Šašak, J.; Gallay, M.; Kaňuk, J.; Hofierka, J.; Minár, J. Combined Use of Terrestrial Laser Scanning and UAV Photogrammetry in Mapping Alpine Terrain. Remote Sens. 2019, 11, 2154. [Google Scholar] [CrossRef]
- Vazquez-Tarrío, D.; Borgniet, L.; Li´ebault, F.; Recking, A. Using UAS optical imagery and SfM photogrammetry to characterize the surface grain size of gravel bars in a braided river (V’en’eon River, French Alps). Geomorphology 2017, 285, 94–105. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Territorial Classification | |
| Region | Prešov |
| District | Poprad |
| Village | Vysoké Tatry |
| Cadastral area | Tatranská Lomnica |
| Geomorphological classification | |
| Geomorphological system | Alps–Himalaya System |
| Geomorphological sub-system | Carpathian Mountains |
| Geomorphological province | Western Carpathians |
| Geomorphological sub-province | Inner Western Carpathians |
| Geomorphological area | Fatra-Tatra Area |
| Geomorphological unit | Tatra Mountains |
| Geomorphological sub-unit | Eastern Tatras |
| Geomorphological part | High Tatras |
| Regional geological division | Fatra-Tatra zone |
| Measuring Device | Epoch |
|---|---|
| Spatial polar method | |
| Leica TS 02 | 2018 |
| Leica TS06 | 2022 |
| GNSS method | |
| GNSS set Leica GPS900cs | 2018 |
| GNSS set Leica GS07 | 2022 |
| Photogrammetric method 20 megapixelov | |
| UAS DJI Phantom 4 Pro | 2018 |
| DJI Phantom 4 RTK UAS | 2022 |
| TLS method | |
| Leica P40 | 2018 |
| Leica RTC360 | 2022 |
| Leveling method 15.2 V | |
| Leica DNA03 | 2022 |
| Leica TS02 | Leica TS06 | |
|---|---|---|
| Angle measurement | ||
| Accuracy | 7″ (2.0 mgon) | 2″ (0.6 mgon) |
| Compensator | Dual-axis | Dual-axis |
| Distance measurement with a prism | ||
| Range | 3–500 m | 3–500 m |
| Accuracy | Standard: 1.5 mm + 2 ppm Fast: 3.0 mm + 2 ppm Tracking: 3.0 mm + 2 ppm | Standard: 1.5 mm + 2 ppm Fast: 3.0 mm + 2 ppm Tracking: 3.0 mm + 2 ppm |
| Standard measurement time | 1.0 s | 1.0 s |
| Distance measurement without a prism | ||
| Range | >400 m | >500 m |
| Accuracy | 2 mm + 2 ppm | 2 mm + 2 ppm |
| Laser dot size | at 30 m: 7 × 10 mm at 50 m: 8 × 20 mm | at 30 m: 7 × 10 mm at 50 m: 8 × 20 mm |
| Operation | ||
| Temperature range | −20 °C to +50 °C | −20 °C to +50 °C |
| DJI Phantom 4 Pro | DJI Phantom 4 RTK | |
|---|---|---|
| Aircraft | ||
| Weight | 1388 g | 1391 g |
| Max ascent/descent speed | 6 m/s and 4 m/s | 6 m/s and 3 m/s |
| Max flight speed | 20 m/s (mode S) | 16 m/s (mode A) |
| Satellite positioning system | GPS/GLONASS | GPS/GLONASS/Galileo/BeiDou |
| Max flight time | 28 min. | 30 min. |
| Wind speed resistance | 10 m/s | |
| Operating temperature range | 0 °C to +40 °C | |
| Camera | ||
| Sensor | 1″ CMOS | |
| Effective pixels Active pixels | 20 Megapixels | |
| Image size | 4864 pixels × 3648 pixels (4:3) | |
| Gimbal pitch | −90° to +30° | |
| GNSS Positioning Accuracy | ||
| Horizontal | up to 5 m (without augmentation service) | 1 cm + 1 ppm (RTK) |
| Vertical | 1.5 cm + 1 ppm (RTK) | |
| Battery | ||
| Type | LiPo 4S | LiPo 4S |
| Capacity | 5350 mAh | 5870 mAh |
| Voltage | 15.2 V | 15.2 V |
| DJI Phantom 4 Pro | DJI Phantom 4 RTK | |
|---|---|---|
| Epoch of measurement | 2018 | 2022 |
| Number of images | 1389 | 605 |
| Number of GCP | 16 | 8 |
| Number of control points | 10 | 5 |
| Flight height [m] | 35 | 45 |
| GSD [cm/pix] | 0.95 | 1.50 |
| Overlap of the image [%] | 80 | 70 |
| Roll angle of the camera [°] | 90 | 30 |
| Pitch value of the gimbal [°] | 75 | 80 |
| Total flight time [h] | 3 | 1 |
| Type | Compact, pulse, time-of-flight, Laser class 1 | |
| Tilt compensator | Dual-axis | |
| Scan rate | Up to 1,000,000 points/s | |
| Accuracy | Distance: 1.2 mm + 10 ppm | |
| Angular: | horizontal: 8″ | |
| vertical: 8″ | ||
| 3D position: 3 mm at 50 m; 6 mm at 100 m | ||
| Target acquisition | 2 mm standard deviation at 50 m | |
| Range and reflectivity | Minimum range: 0.4 m | |
| Maximum range: | 120 m @ 8% reflexivity surface; | |
| 270 m @ 34% reflexivity surface | ||
| Field of view | Horizontal: 360° Vertical: 290° | |
| Temperature range | −20 °C to +50 °C | |
| Accuracy | ±0.3 mm |
| Range | 1.8–60 m |
| Resolution | 0.01 mm |
| Magnification | 24× |
| Compensator | Slope range: ± 10′ Setting accuracy: 0.3″ |
| Measuring time | 3 s |
| Internal memory | 6000 measurements |
| Weight | 2.8 kg |
| Operating temperature range | –20 °C to +50 °C |
| Type | High-speed, pulse, time-of-flight, Laser class 1 | |
| Weight | 5.35 kg | |
| Speed | Up to 2,000,000 points/s | |
| Range | 0.5 m–130 m | |
| Accuracy | Distance: 1.0 mm + 10 ppm Angular: 18″ | |
| 3D points: | 1.9 mm @ 10 m; | |
| 2.9 mm @ 20 m; | ||
| 5.3 mm @ 40 m | ||
| Resolution | 3 mm @ 10 m 6 mm @ 10 m 12 mm @ 10 m | |
| Field of view | Horizontal: 360° Vertical: 300° | |
| Operating temperature | −5 °C to +40 °C | |
| Point Cloud in Epoch 2018 | Point Cloud in Epoch 2022 | |
|---|---|---|
| Number of images | 1389 | 605 |
| The number of tie points | 337,415 | 286,306 |
| The number of points of a dense point cloud | 261,097,729 | 168,456,750 |
| GSD [cm/pix] | 0.95 | 1.50 |
| Error in the X coordinate [mm] | 5 | 13 |
| Error in the Y coordinate [mm] | 9 | 15 |
| Error in the Z coordinate [mm] | 4 | 9 |
| RMSE on GCPs [mm] | 11 | 36 |
| RMSE on CPs [mm] | 15 | 38 |
| Download date | 12 February 2020 | |
| Version | Free | |
| Format | Las 1.4 (classified point cloud), DTM, DSM | |
| Coordinate system | Datum of Uniform Trigonometric Cadastral Network S-JTSK (implementation JTSK03); Baltic Vertical Datum—After Adjustment; ETRS89-h | |
| Sensor | Riegl LMS-Q780 | |
| Flight height | 3224 m ASL | |
| Point density | before the classification | 40 points/m2 |
| after the classification | 14 points/m2 | |
| Overlap | 40% | |
| Point cloud | 122,000 points | |
| Observed Point Nr. | Precise Leveling Z [m] | Difference [mm] | Spatial Polar Method Z [m] | Difference [mm] | ||
|---|---|---|---|---|---|---|
| Base 1st Epoch | 2nd Epoch | Base 1st Epoch | 2nd Epoch | |||
| 1 | 1640.00476 | 1640.00505 | −0.3 | 1640.0083 | 1640.0082 | 0.1 |
| 2 | 1640.82483 | 1640.82670 | −1.9 | 1640.8279 | 1640.8287 | −0.8 |
| 3 | 1642.85170 | 1642.85457 | −2.9 | 1642.8527 | 1642.8532 | −0.5 |
| 4 | 1642.63407 | 1642.63164 | 2.4 | 1642.6328 | 1642.6331 | −0.3 |
| 5 | 1642.98491 | 1642.98659 | −1.7 | 1642.9896 | 1642.9886 | 1.0 |
| 6 | 1641.58462 | 1641.58395 | 0.7 | 1641.5875 | 1641.5882 | −0.7 |
| 7 | 1640.36273 | 1640.36376 | −1.0 | 1640.3617 | 1640.3625 | −0.8 |
| Observed Point Nr. | Base 1st Epoch | 2nd Epoch | Differences | |||
|---|---|---|---|---|---|---|
| X [m] | Y [m] | X [m] | Y [m] | X [mm] | Y [mm] | |
| 1 | 1,183,822.8861 | 336,967.2006 | 1,183,822.8870 | 336,967.1990 | −0.9 | 1.6 |
| 2 | 1,183,818.2449 | 336,965.2630 | 1,183,818.2459 | 336,965.2617 | −1.0 | 1.3 |
| 3 | 1,183,815.7554 | 336,966.9550 | 1,183,815.7564 | 336,966.9537 | −1.0 | 1.3 |
| 4 | 1,183,812.7536 | 336,971.9885 | 1,183,812.7545 | 336,971.9871 | −0.9 | 1.4 |
| 5 | 1,183,817.5043 | 336,978.4984 | 1,183,817.5053 | 336,978.4969 | −1.0 | 1.5 |
| 6 | 1,183,821.2140 | 336,975.5514 | 1,183,821.2145 | 336,975.5502 | −0.5 | 1.2 |
| 7 | 1,183,823.0606 | 336,972.3093 | 1,183,823.0621 | 336,972.3085 | −1.5 | 0.8 |
| UAS Photogrammetry | TLS | ALS | |
|---|---|---|---|
| Cost | Low cost | High purchase cost | High purchase and realization costs |
| Implementation | Flexible, quick, easy | Flexible, quick, difficult | Occasional campaign |
| Approximate shooting time | hours | days | days |
| Detail | High, full coverage | High, incomplete coverage | Low, incomplete coverage |
| Preferred research object | Small or mid-range areas | Small areas | Wide-range areas |
| Point density | High density | High density | Lower density |
| 3000 points/m2 | 3000 points/m2 | 40 points/m2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kovanič, Ľ.; Peťovský, P.; Topitzer, B.; Blišťan, P. Complex Methodology for Spatial Documentation of Geomorphological Changes and Geohazards in the Alpine Environment. Land 2024, 13, 112. https://doi.org/10.3390/land13010112
Kovanič Ľ, Peťovský P, Topitzer B, Blišťan P. Complex Methodology for Spatial Documentation of Geomorphological Changes and Geohazards in the Alpine Environment. Land. 2024; 13(1):112. https://doi.org/10.3390/land13010112
Chicago/Turabian StyleKovanič, Ľudovít, Patrik Peťovský, Branislav Topitzer, and Peter Blišťan. 2024. "Complex Methodology for Spatial Documentation of Geomorphological Changes and Geohazards in the Alpine Environment" Land 13, no. 1: 112. https://doi.org/10.3390/land13010112