
Applicability Analysis of GF-2PMS and PLANETSCOPE Data for Ground Object Recognition in Karst Region

Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Data Sources
2.3. Methods
2.3.1. FSDAF Model
2.3.2. STDFA Model
2.3.3. Fit_FC Model
2.3.4. Accuracy Evaluation
3. Results
3.1. The Accuracy of Land–Water Boundary
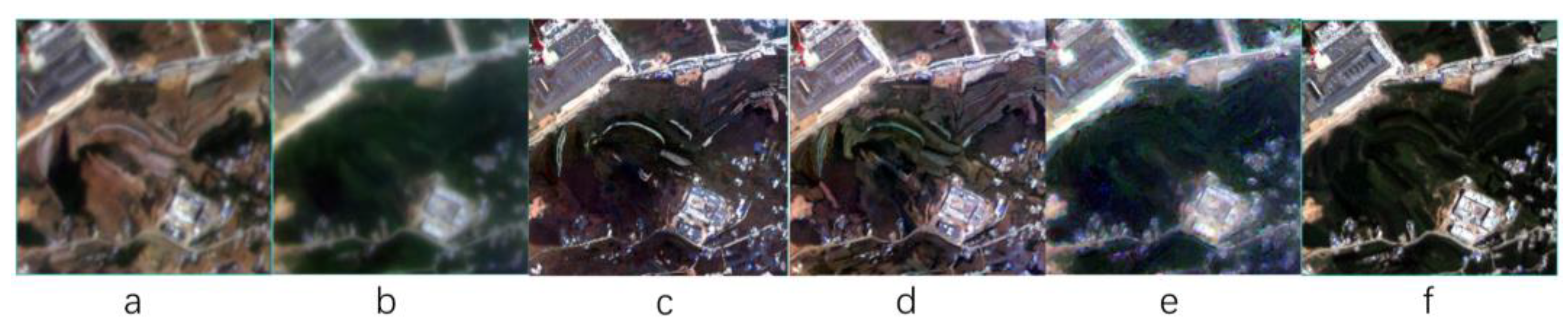
3.2. The Accuracy of Mountains
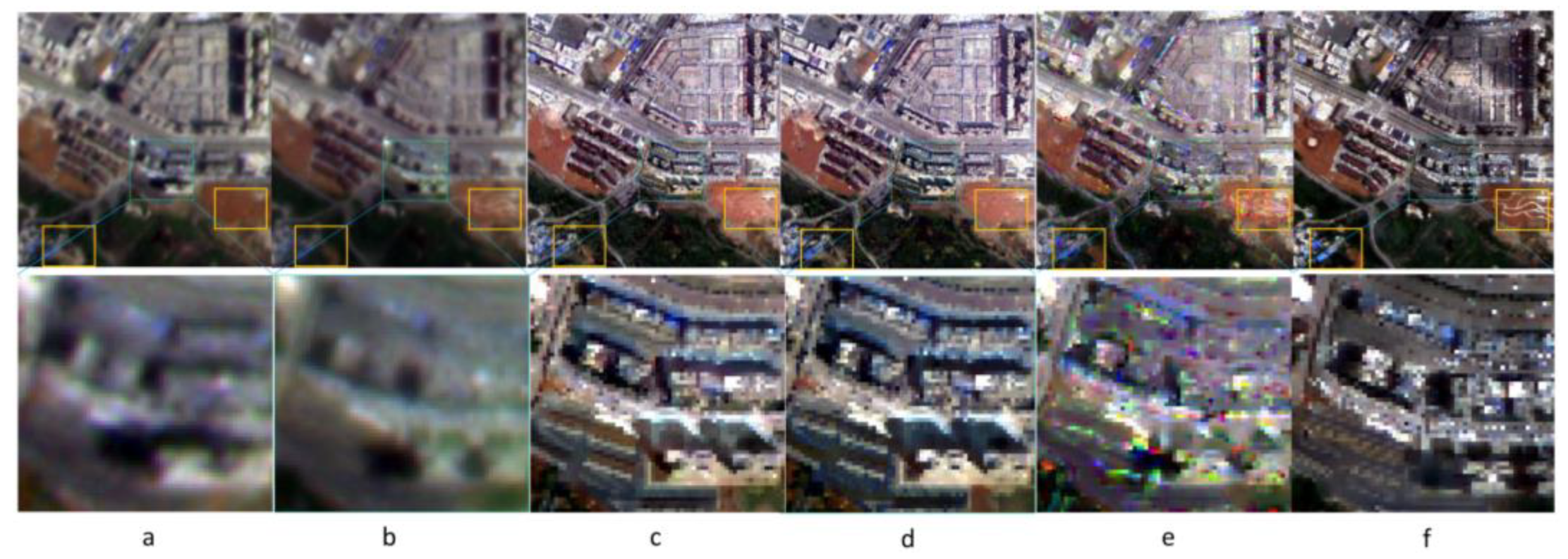
3.3. The Accuracy of Urban
4. Discussion
4.1. FSDAF in Different Regions
4.2. STDFA in Different Regions
4.3. Fit_FC in Different Regions
4.4. Statistical Precision Analysis
4.5. Classification Accuracy Verification
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Febles-Gonzalez, J.M.; Vega-Carreno, M.B.; Tolon-Becerra, A.; Lastra-Bravo, X. Assessment of soil erosion in karst regions of Havana, Cuba. Land Degrad. Dev. 2012, 23, 465–474. [Google Scholar] [CrossRef]
- Zhang, S.R.; Bai, X.Y.; Zhao, C.W.; Tan, Q.; Luo, G.J.; Wang, J.F.; Li, Q.; Wu, L.H.; Chen, F.; Li, C.J.; et al. Global CO2 consumption by silicate rock chemical weathering: Its past and future. Earth’s Futur. 2021, 9, e2020EF001938. [Google Scholar] [CrossRef]
- Li, Q.; Wang, S.; Bai, X.; Luo, G.; Song, X.; Tian, Y.; Hu, Z.; Yang, Y.; Tian, S. Change Detection of Soil Formation Rate in Space and Time Based on Multi Source Data and Geospatial Analysis Techniques. Remote Sens. 2020, 12, 121. [Google Scholar] [CrossRef] [Green Version]
- Li, C.J.; Bai, X.Y.; Tan, Q.; Zhao, C.W.; Luo, G.J.; Wu, L.H.; Chen, F.; Xi, H.P.; Luo, X.L.; Ran, C.; et al. High-resolution mapping of the global silicate weathering carbon sink and its long-term changes. Glob. Change Biol. 2022, 28, 4377–4394. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.R.; Bai, X.Y.; Zhao, C.W.; Tan, Q.; Luo, G.J.; Wu, L.H.; Xi, H.P.; Li, C.J.; Chen, F.; Ran, C.; et al. China’ s carbon budget inventory from 1997 to 2017 and its challenges to achieving carbon neutral strategies. J. Clean. Prod. 2022, 347, 130966. [Google Scholar] [CrossRef]
- Gong, S.H.; Wang, S.J.; Bai, X.Y.; Luo, G.J.; Zeng, C. Response of the weathering carbon sink in terrestrial rocks to climate variables and ecological restoration in China. Sci. Total Environ. 2020, 750, 141525. [Google Scholar] [CrossRef] [PubMed]
- Chen, F.; Bai, X.; Liu, F.; Luo, G.; Tian, Y.; Qin, L.; Li, Y.; Xu, Y.; Wang, J.; Wu, L.; et al. Analysis Long-Term and Spatial Changes of Forest Cover in Typical Karst Areas of China. Land 2022, 11, 1349. [Google Scholar] [CrossRef]
- Roy, D.P.; Ju, J.; Lewis, P.; Schaaf, C.; Gao, F.; Hansen, M.; Lindquist, E. Multi-temporal MODIS–Landsat data fusion for relative radiometric normalization, gap filling, and prediction of Landsat data. Remote Sens. Environ. 2008, 112, 3112–3130. [Google Scholar] [CrossRef]
- Gevaert, C.M.; García-Haro, F.J. A comparison of STARFM and an unmixing-based algorithm for Landsat and MODIS data fusion. Remote Sens. Environ. 2015, 156, 34–44. [Google Scholar] [CrossRef]
- Liao, C.; Wang, J.; Pritchard, I.; Liu, J.; Shang, J. A Spatio-Temporal Data Fusion Model for Generating NDVI Time Series in Heterogeneous Regions. Remote Sens. 2017, 9, 1125. [Google Scholar] [CrossRef]
- Guan, X.; Liu, G.; Huang, C.; Liu, Q.; Wu, C.; Jin, Y.; Li, Y. An Object-Based Linear Weight Assignment Fusion Scheme to Improve Classification Accuracy Using Landsat and MODIS Data at the Decision Level. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6989–7002. [Google Scholar] [CrossRef]
- Chen, B.; Ge, Q.; Fu, D.; Yu, G.; Sun, X.; Wang, S.; Wang, H. A data-model fusion approach for upscaling gross ecosystem productivity to the landscape scale based on remote sensing and flux footprint modelling. Biogeosciences 2010, 7, 2943–2958. [Google Scholar] [CrossRef] [Green Version]
- Zhang, H.K.; Huang, B.; Zhang, M.; Cao, K.; Yu, L. A generalization of spatial and temporal fusion methods for remotely sensed surface parameters. Int. J. Remote Sens. 2015, 36, 4411–4445. [Google Scholar] [CrossRef]
- Wei, J.; Wang, L.; Liu, P.; Chen, X.; Li, W.; Zomaya, A.Y. Spatiotemporal Fusion of MODIS and Landsat-7 Reflectance Images via Compressed Sensing. IEEE Trans. Geosci. Remote Sens. 2017, 55, 7126–7139. [Google Scholar] [CrossRef]
- Ju, J.; Roy, D.P. The availability of cloud-free Landsat ETM+ data over the conterminous United States and globally. Remote Sens. Environ. 2008, 112, 1196–1211. [Google Scholar] [CrossRef]
- Mizuochi, H.; Hiyama, T.; Ohta, T.; Fujioka, Y.; Kambatuku, J.R.; Iijima, M.; Nasahara, K.N. Development and evaluation of a lookup-table-based approach to data fusion for seasonal wetlands monitoring: An integrated use of AMSR series, MODIS, and Landsat. Remote Sens. Environ. 2017, 199, 370–388. [Google Scholar] [CrossRef]
- Song, H.; Huang, B. Spatiotemporal Satellite Image Fusion Through One-Pair Image Learning. IEEE Trans. Geosience Remote Sens. 2013, 51, 1883–1896. [Google Scholar] [CrossRef]
- Liu, J.; Fan, X.; Jiang, J.; Liu, R.; Luo, Z. Learning a Deep Multi-scale Feature Ensemble and an Edge-attention Guidance for Image Fusion. IEEE Trans. Circuits Syst. Video Technol. 2021, 32, 105–119. [Google Scholar] [CrossRef]
- Zhu, X.; Cai, F.; Tian, J.; Williams, T.K.-A. Spatiotemporal Fusion of Multisource Remote Sensing Data: Literature Survey, Taxonomy, Principles, Applications, and Future Directions. Remote Sens. 2018, 10, 527. [Google Scholar] [CrossRef] [Green Version]
- Wu, B.; Huang, B.; Cao, K.; Zhuo, G. Improving spatiotemporal reflectance fusion using image inpainting and steering kernel regression techniques. Int. J. Remote Sens. 2017, 38, 706–727. [Google Scholar] [CrossRef]
- Amorós-López, J.; Gómez-Chova, L.; Alonso, L.; Guanter, L.; Zurita-Milla, R.; Moreno, J.; Camps-Valls, G. Multitemporal fusion of Landsat/TM and ENVISAT/MERIS for crop monitoring. Int. J. Appl. Earth Obs. Geoinf. 2013, 23, 132–141. [Google Scholar] [CrossRef]
- Zhang, W.; Li, A.; Jin, H.; Bian, J.; Zhang, Z.; Lei, G.; Qin, Z.; Huang, C. An Enhanced Spatial and Temporal Data Fusion Model for Fusing Landsat and MODIS Surface Reflectance to Generate High Temporal Landsat-Like Data. Remote Sens. 2013, 5, 5346–5368. [Google Scholar] [CrossRef] [Green Version]
- Hwang, T.; Song, C.; Bolstad, P.V.; Band, L.E. Downscaling real-time vegetation dynamics by fusing multi-temporal MODIS and Landsat NDVI in topographically complex terrain. Remote Sens. Environ. 2011, 115, 2499–2512. [Google Scholar] [CrossRef]
- Huang, B.; Song, H. Spatiotemporal reflectance fusion via sparse representation. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3707–3716. [Google Scholar] [CrossRef]
- Zhu, X.; Helmer, E.H.; Gao, F.; Liu, D.; Chen, J.; Lefsky, M.A. A flexible spatiotemporal method for fusing satellite images with different resolutions. Remote Sens. Environ. Interdiscip. J. 2016, 172, 165–177. [Google Scholar] [CrossRef]
- Wang, Q.M.; Atkinson, P.M. Spatio-Temporal Fusion for Daily Sentinel-2 Images. Remote Sens. Environ. 2018, 204, 31–42. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Ren, Y.; Gao, W.; Jia, J.; Tao, S.; Liu, X. An enhanced spatiotemporal fusion method–Implications for DNN based time-series LAI estimation by using Sentinel-2 and MODIS. Field Crops Res. 2022, 279, 108452. [Google Scholar] [CrossRef]
- Qiao, X.; Yang, G.; Shi, J.; Zuo, Q.; Liu, L.; Niu, M.; Wu, X.; Ben-Gal, A. Remote Sensing Data Fusion to Evaluate Patterns of Regional Evapotranspiration: A Case Study for Dynamics of Film-Mulched Drip-Irrigated Cotton in China’s Manas River Basin over 20 Years. Remote Sens. 2022, 14, 3438. [Google Scholar] [CrossRef]
- Zhang, H.; Huang, F.; Hong, X.; Wang, P. A Sensor Bias Correction Method for Reducing the Uncertainty in the Spatiotemporal Fusion of Remote Sensing Images. Remote Sens. 2022, 14, 3274. [Google Scholar] [CrossRef]
- Chen, R.; Li, X.; Zhang, Y.; Zhou, P.; Wang, Y.; Shi, L.; Jiang, L.; Ling, F.; Du, Y. Spatiotemporal Continuous Impervious Surface Mapping by Fusion of Landsat Time Series Data and Google Earth Imagery. Remote Sens. 2021, 13, 2409. [Google Scholar] [CrossRef]
- Morgan, B.E.; Chipman, J.W.; Bolger, D.T.; Dietrich, J.T. Spatiotemporal Analysis of Vegetation Cover Change in a Large Ephemeral River: Multi-Sensor Fusion of Unmanned Aerial Vehicle (UAV) and Landsat Imagery. Remote Sens. 2021, 13, 51. [Google Scholar] [CrossRef]
- Luo, Y.; Guan, K.; Peng, J.; Wang, S.; Huang, Y. STAIR 2.0: A Generic and Automatic Algorithm to Fuse Modis, Landsat, and Sentinel-2 to Generate 10 m, Daily, and Cloud-/Gap-Free Surface Reflectance Product. Remote Sens. 2020, 12, 3209. [Google Scholar] [CrossRef]
- Zhou, C.W.; Yang, R.; Yu, L.F.; Zhang, Y.; Yan, L.B. Hydrological and ecological effects of climate change in Caohai watershed based on SWAT model. Appl. Ecol. Environ. Res. 2019, 17, 161–172. [Google Scholar] [CrossRef]
- Wu, J.; Yang, H.; Yu, W.; Yin, C.; He, Y.; Zhang, Z.; Xu, D.; Li, Q.; Chen, J. Effect of Ecosystem Degradation on the Source of Particulate Organic Matter in a Karst Lake: A Case Study of the Caohai Lake, China. Water 2022, 14, 1867. [Google Scholar] [CrossRef]
- Yang, K.; Yu, Z.; Luo, Y.; Zhou, X.; Shang, C. Spatial-temporal variation of lake surface water temperature and its driving factors in Yunnan-Guizhou Plateau. Water Resour. Res. 2019, 55, 4688–4703. [Google Scholar] [CrossRef]
- Xiao, L.; Chen, X.; Zhang, R.; Zhang, Z. Spatiotemporal Evolution of Droughts and Their Teleconnections with Large-Scale Climate Indices over Guizhou Province in Southwest China. Water 2019, 11, 2104. [Google Scholar] [CrossRef] [Green Version]
- Lian, Y.Q.; You, G.J.Y.; Lin, K.R.; Jiang, Z.C.; Zhang, C.; Qin, X.Q. Characteristics of climate change in southwest China karst region and their potential environmental impacts. Environ. Earth Sci. 2014, 74, 937–944. [Google Scholar] [CrossRef]
- Li, W.; Jiang, J.; Guo, T.; Zhou, M.; Tang, Y.; Wang, Y.; Zhang, Y.; Cheng, T.; Zhu, Y.; Cao, W.; et al. Generating Red-Edge Images at 3 M Spatial Resolution by Fusing Sentinel-2 and Planet Satellite Products. Remote Sens. 2019, 11, 1422. [Google Scholar] [CrossRef] [Green Version]
- Kwan, C.; Zhu, X.; Gao, F.; Chou, B.; Perez, D.; Li, J.; Shen, Y.; Koperski, K.; Marchisio, G. Assessment of spatiotemporal fusion algorithms for planet and worldview images. Sensors 2018, 18, 1051. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ren, K.; Sun, W.; Meng, X.; Yang, G.; Du, Q. Fusing China GF-5 Hyperspectral Data with GF-1, GF-2 and Sentinel-2A Multispectral Data: Which Methods Should Be Used? Remote Sens. 2020, 12, 882. [Google Scholar] [CrossRef]
- Ren, J.; Yang, W.; Yang, X.; Deng, X.; Zhao, H.; Wang, F.; Wang, L. Optimization of Fusion Method for GF-2 Satellite Remote Sensing Images based on the Classification Effect. Earth Sci. Res. J. 2019, 23, 163–169. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Xie, F.; Zhang, L. Preprocessing and fusion analysis of GF-2 satellite Remote-sensed spatial data. In Proceedings of the 2018 International Conference on Information Systems and Computer Aided Education (ICISCAE), Changchun, China, 6–8 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 24–29. [Google Scholar]
- Zhu, X.; Chen, J.; Gao, F.; Chen, X.; Masek, J.G. An enhanced spatial and temporal adaptive reflectance fusion model for complex heterogeneous regions. Remote Sens. Environ. 2010, 114, 2610–2623. [Google Scholar] [CrossRef]
- Jia, D.; Cheng, C.; Song, C.; Shen, S.; Ning, L.; Zhang, T. A Hybrid Deep Learning-Based Spatiotemporal Fusion Method for Combining Satellite Images with Different Resolutions. Remote Sens. 2021, 13, 645. [Google Scholar] [CrossRef]
- Tang, Y.; Wang, Q.; Zhang, K.; Atkinson, P. Quantifying the Effect of Registration Error on Spatio-temporal Fusion. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 487–503. [Google Scholar] [CrossRef] [Green Version]
- Cheng, F.; Fu, Z.; Tang, B.; Huang, L.; Huang, K.; Ji, X. STF-EGFA: A Remote Sensing Spatiotemporal Fusion Network with Edge-Guided Feature Attention. Remote Sens. 2022, 14, 3057. [Google Scholar] [CrossRef]
- Hou, S.; Sun, W.; Guo, B.; Li, C.; Li, X.; Shao, Y.; Zhang, J. Adaptive-SFSDAF for Spatiotemporal Image Fusion that Selectively Uses Class Abundance Change Information. Remote Sens. 2020, 12, 3979. [Google Scholar] [CrossRef]
- Wu, M.; Niu, Z.; Wang, C.; Wu, C.; Wang, L. Use of MODIS and Landsat time series data to generate high-resolution temporal synthetic Landsat data using a spatial and temporal reflectance fusion model. J. Appl. Remote Sens. 2012, 6, 063507. [Google Scholar]
- Wu, M.; Wu, C.; Huang, W.; Niu, Z.; Wang, C.; Li, W.; Hao, P. An Improved High Spatial and Temporal Data Fusion Approach for Combining Landsat and MODIS Data to Generate Daily Synthetic Landsat Imagery. Inf. Fusion 2016, 31, 14–25. [Google Scholar] [CrossRef]
- Liu, M.; Ke, Y.; Yin, Q.; Chen, X.; Im, J. Comparison of Five Spatio-Temporal Satellite Image Fusion Models over Landscapes with Various Spatial Heterogeneity and Temporal Variation. Remote Sens. 2019, 11, 2612. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band | Band Range of GF-2 (μm) | Band Range of PS (μm) |
|---|---|---|
| Blue | 0.450~0.520 | 0.420~0.530 |
| Green | 0.520~0.590 | 0.500~0.590 |
| Red | 0.630~0.690 | 0.610~0.700 |
| NIR | 0.770~0.890 | 0.760~0.860 |
| CJ5 | Method | CC | SSIM | RMSE | AAD |
|---|---|---|---|---|---|
| Blue | FSDAF | 0.7134 | 0.7449 | 0.0987 | 0.0730 |
| STDFA | 0.6127 | 0.7351 | 0.0995 | 0.0733 | |
| Fit_FC | 0.2397 | 0.6283 | 0.1190 | 0.0941 | |
| Green | FSDAF | 0.6240 | 0.7937 | 0.1123 | 0.0834 |
| STDFA | 0.5258 | 0.7770 | 0.1148 | 0.0848 | |
| Fit_FC | 0.1247 | 0.6853 | 0.1376 | 0.1102 | |
| Red | FSDAF | 0.6387 | 0.7328 | 0.1232 | 0.0970 |
| STDFA | 0.4887 | 0.7135 | 0.1241 | 0.0969 | |
| Fit_FC | 0.3968 | 0.6609 | 0.1384 | 0.1144 | |
| NIR | FSDAF | 0.6036 | 0.7070 | 0.1427 | 0.0939 |
| STDFA | 0.5969 | 0.7221 | 0.1411 | 0.0937 | |
| Fit_FC | 0.5965 | 0.7185 | 0.1438 | 0.0924 | |
| Mean | FSDAF | 0.6449 | 0.7446 | 0.1192 | 0.0868 |
| STDFA | 0.5560 | 0.7369 | 0.1199 | 0.0872 | |
| Fit_FC | 0.3394 | 0.6733 | 0.1347 | 0.1028 |
| Band | Method | CC | SSIM | RMSE | AAD |
|---|---|---|---|---|---|
| Blue | FSDAF | 0.6437 | 0.4863 | 0.2899 | 0.0653 |
| STDFA | 0.7335 | 0.5013 | 0.0787 | 0.0652 | |
| Fit_FC | 0.7588 | 0.5590 | 0.0605 | 0.0445 | |
| Green | FSDAF | 0.6563 | 0.6621 | 0.2817 | 0.0473 |
| STDFA | 0.7107 | 0.6763 | 0.0720 | 0.0469 | |
| Fit_FC | 0.7648 | 0.7171 | 0.0607 | 0.0320 | |
| Red | FSDAF | 0.6920 | 0.6478 | 0.2791 | 0.0288 |
| STDFA | 0.7437 | 0.6680 | 0.0688 | 0.0290 | |
| Fit_FC | 0.6658 | 0.7041 | 0.0614 | 0.0230 | |
| NIR | FSDAF | 0.6214 | 0.6866 | 0.2744 | 0.0115 |
| STDFA | 0.6009 | 0.6961 | 0.0672 | 0.0114 | |
| Fit_FC | 0.6658 | 0.6760 | 0.0641 | 0.0171 | |
| Mean | FSDAF | 0.6534 | 0.6207 | 0.2813 | 0.0382 |
| STDFA | 0.6972 | 0.6354 | 0.0717 | 0.0381 | |
| Fit_FC | 0.7138 | 0.6641 | 0.0617 | 0.0292 |
| Band | Method | CC | SSIM | RMSE | AAD |
|---|---|---|---|---|---|
| Blue | FSDAF | 0.5880 | 0.7839 | 0.0449 | 0.0091 |
| STDFA | 0.5711 | 0.7835 | 0.0455 | 0.0091 | |
| Fit_FC | 0.5447 | 0.7775 | 0.0467 | 0.0057 | |
| Green | FSDAF | 0.5092 | 0.7382 | 0.0568 | 0.0079 |
| STDFA | 0.4850 | 0.7313 | 0.0581 | 0.0079 | |
| Fit_FC | 0.4797 | 0.7451 | 0.0578 | 0.0010 | |
| Red | FSDAF | 0.5775 | 0.7238 | 0.0604 | 0.0073 |
| STDFA | 0.5467 | 0.7098 | 0.0626 | 0.0005 | |
| Fit_FC | 0.5768 | 0.7334 | 0.0608 | 0.0030 | |
| NIR | FSDAF | 0.4989 | 0.6570 | 0.0754 | 0.0057 |
| STDFA | 0.4240 | 0.6044 | 0.0806 | 0.0057 | |
| Fit_FC | 0.5436 | 0.6733 | 0.0727 | 0.0053 | |
| Mean | FSDAF | 0.5434 | 0.7257 | 0.0594 | 0.0075 |
| STDFA | 0.5067 | 0.7073 | 0.0617 | 0.0058 | |
| Fit_FC | 0.5362 | 0.7323 | 0.0595 | 0.0038 |
| Land Use | Classification (km2) | TNLS (km2) | D-Value (km2) | Ratio |
|---|---|---|---|---|
| Dry land | 1.1301 | 1.3901 | −0.2600 | 81.29% |
| Water | 2.7325 | 2.6749 | 0.0576 | 102.15% |
| Forest land | 1.0585 | 0.937 | 0.1215 | 112.96% |
| Construction land | 3.1611 | 3.0801 | 0.0810 | 102.63% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Shen, C.; Zhou, S.; Yang, R.; Luo, X.; Zhu, G. Applicability Analysis of GF-2PMS and PLANETSCOPE Data for Ground Object Recognition in Karst Region. Land 2023, 12, 33. https://doi.org/10.3390/land12010033
Zhang Y, Shen C, Zhou S, Yang R, Luo X, Zhu G. Applicability Analysis of GF-2PMS and PLANETSCOPE Data for Ground Object Recognition in Karst Region. Land. 2023; 12(1):33. https://doi.org/10.3390/land12010033
Chicago/Turabian StyleZhang, Yu, Chaoyong Shen, Shaoqi Zhou, Ruidong Yang, Xuling Luo, and Guanglai Zhu. 2023. "Applicability Analysis of GF-2PMS and PLANETSCOPE Data for Ground Object Recognition in Karst Region" Land 12, no. 1: 33. https://doi.org/10.3390/land12010033