1. Introduction
The issue of potable water shortages has become more and more critical in many parts of the world. Water loss is considered as a serious problem in both developed and developing countries [
1], and is attracting more and more public concern. Non-revenue water or unaccounted for water is estimated at between 20 to 40% for most countries investigated [
2,
3]. The inverse transient analysis (IWA) method separates water losses in distribution systems into real and apparent losses. Real losses (leakage) from pipelines or pipe networks may not only cause large economic loss, but can also affect environmental hygiene [
4,
5]. Leaks may create serious water quality problems, resulting in equipment failure, problematic operations management, errors in pipeline design, and significant costs [
4,
6,
7,
8,
9,
10]. Among the various reasons for water losses, leaks in water distribution networks (WDNs) are considered to be one of the major problems to be solved.
Basically, the leak detection and location techniques can be generally divided into two main categories, steady-state based and transient based. Many steady-state based methods, such as Acoustic Emissions [
11,
12] and vibration monitoring [
13,
14,
15,
16], were developed for leak detection in the pressurized pipeline. These steady-state vibro-acoustic based methods have been proven to be quite effective in previous studies. The most important advantage is that the steady-state based methods can provide the high precision results without altering the operating conditions of the system. However, these methods were generally developed based on the specialized hardware, which lead to high costs [
17]. On the other hand, transient-based methods (e.g., pressure wave propagation) have been widely used to detect leaks in WDN. A transient event can be generated by a simple operation, such as valve closure and opening [
18]. In the transient condition, the leak location, leak orifice size, and frictional losses will affect the head changes in the pipe network when compared with those of the system in steady-state. The major advantage of transient-based methods is that information about such leaks can be efficiently and cost-effectively obtained, because transient waves travel along fluid-filled pipes at high speed [
4,
5,
19]. A large amount of data can be collected by a simple operation in a very short period of time. However, the transient operation may cause some undesired damage or failure in the system if the operation is not properly handled.
Many previous studies have focused on the development of numerical simulations with optimization algorithms for leak detection in a WDN. Moreover, heuristic optimization approaches have also been widely discussed in the community of water supply engineers. Several earlier researchers have used heuristic algorithms with a synthetic WDN to test their ability to detect leaks. Examples are genetic algorithm (GA) [
20], hybrid genetic algorithm (HGA) [
21], particle swarm optimization (PSO) [
22], sequential quadratic programming (SQP) [
23], central force optimization (CFO) [
24], and simulating annealing (SA) [
25]. Vítkovský et al. [
20] demonstrated the ability of the GA in lieu of the Levenberg-Marquardt (LM) method used in [
26] to identify leaking nodes and pipe friction factors in the same WDN. Kapelan et al. [
21] combined the GA and LM method as a hybrid inverse transient model (HGA) to exploit the advantages of combining two methods. The HGA is more stable than LM model, and it is more accurate and faster than the GA model. Jung and Karney [
22] showed that both GA and PSO are capable of solving the ITA problem. It was found that PSO is more suitable than GA not only in convergence but also in accuracy. Haghighi and Ramos [
24] exploited an ITA-based optimal algorithm, termed CFO, as an inverse problem solver for leak detection in a reference leaking pipe network. CFO exhibited good accuracy for identifying the friction factor and leak location. Recently, Huang et al. [
25] presented an ITA-type optimization approach, called LDSA, based on the combination of the transient flow simulation and SA to detect leaks in a laboratory pipeline and a synthetic pipe network. The SA was used to solve the inverse problem with a least-squares criterion objective function.
On the other hand, some studies applied their leak detection techniques to a laboratory pipe system or real WDNs. Ferrante et al. [
27] coupled the wavelet analysis with a Lagrangian model to identify the leaks in a laboratory branched pipe system in the Water Engineering Laboratory at the University of Perugia. Their approach memorized the amplitude of each wave and the moment at which it passed the leak, and then identified the leak. Nazif et al. [
28] introduced a heuristic method combined the artificial neural network (ANN) model and GA to find the optimal hourly water level variation in a water distribution storage tank for different seasons. Ferrante et al. [
29] investigated the relationship between leak geometry and detectability within steady-state and transient based techniques. They used the experimental tests to demonstrate the effect of higher system pressure for leak detectability in steady-state and transient conditions. Casillas et al. [
30] introduced a sensor placement approach based on either GA or PSO to detect leaks in WDNs in Hanoi and in Limassol. The results showed that PSO obtains results faster than GA, and it is very effective for smaller WDN or with fewer sensors. However, the GA provided better placement solutions with higher efficiency for larger networks or more sensors. Meniconi et al. [
31] used a Lagrangian model simulating pressure wave propagation to evaluate the pipe pressure wave speed and to locate the possible anomalies by coupling GA and wavelet analysis, respectively. Their approach was further executed in a part of the WDN of Milan for providing the diagnosis of the pipe system. Lee et al. [
32] integrated the advantage of the methods of cumulative sum and wavelet transform to effectively detect the sudden pressure changes of WDN. The pressure data obtained from the real burst accident were used to verify their burst detection and location algorithm. Moreover, many other studies were devoted to the development of optimization approaches for leak detection in real cases [
19,
33,
34].
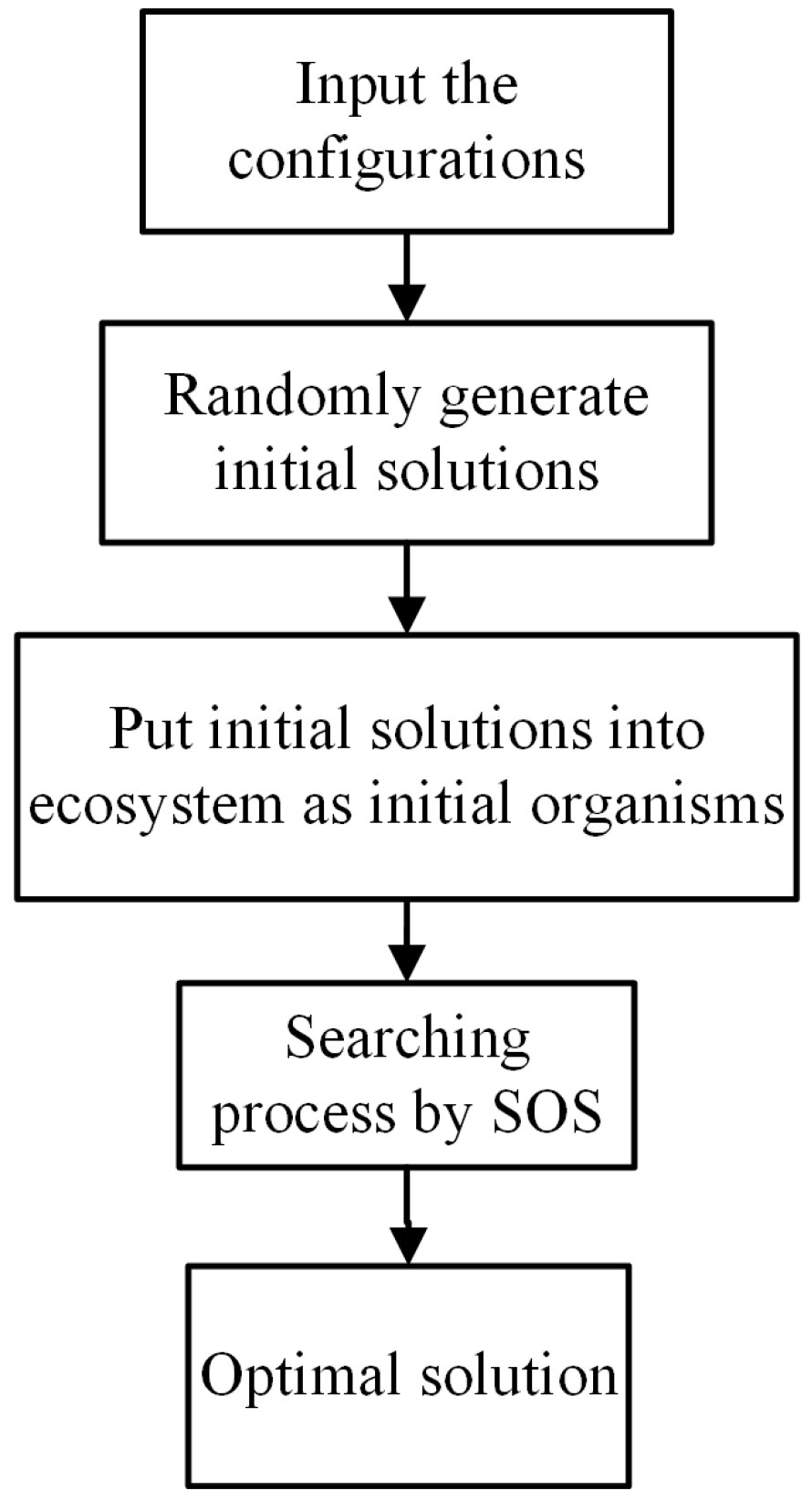
This paper focuses on solving the leak detection problem, as well as the number of leaks, their location, the value of CdA (discharge coefficient multiplies area opening of the orifice) in the pipe network, with optimum transient perturbations. A hybrid heuristic approach, called leak detection ordinal symbiotic organism search (LDOSOS), is developed based on the ordinal optimization algorithm (OOA) and symbiotic organism search (SOS) for automatically determining leak information in a leaking pipe network. In order to examine the performance of the proposed approach, two synthetic leaking scenarios with different pipe network configurations are considered. The ability of convergence compared with different optimization algorithms pertaining to the detection results is addressed in first scenario. Furthermore, the use of the optimum transient generation is demonstrated in the second scenario.
4. Conclusions
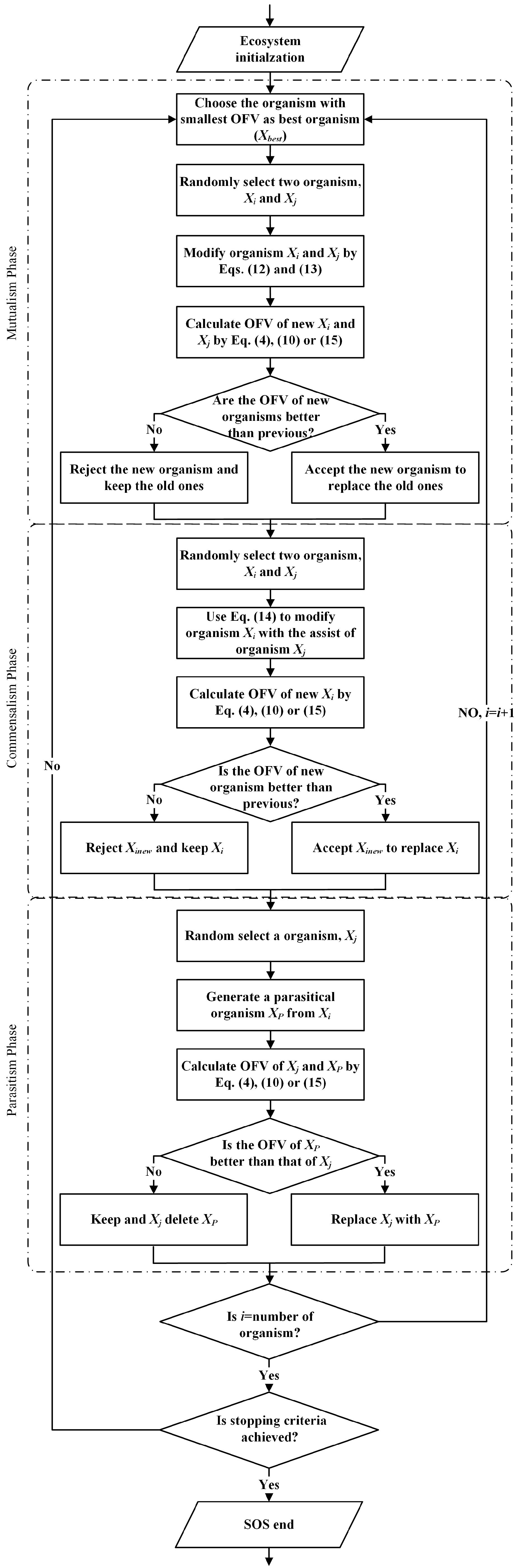
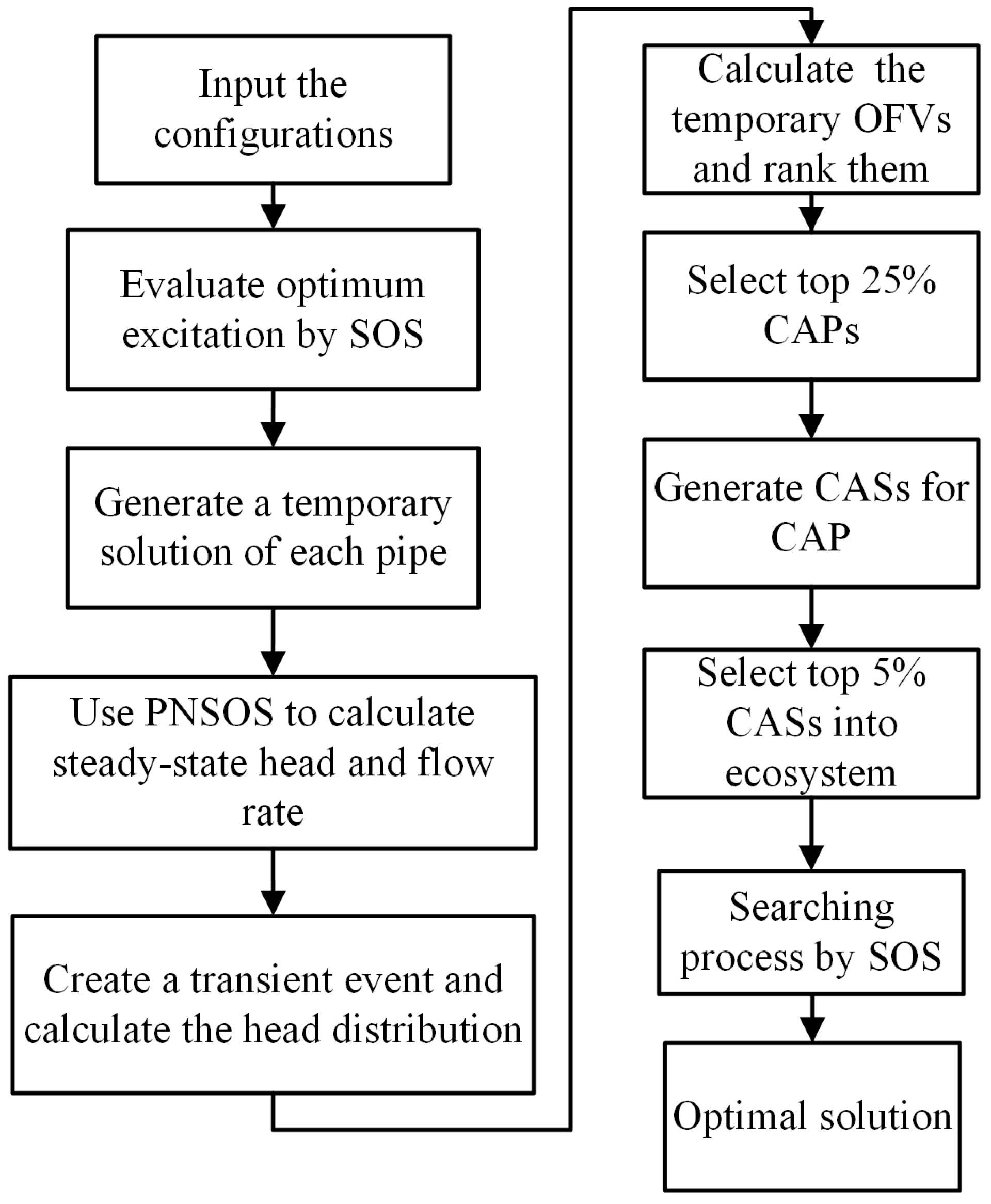
This study presents a hybrid heuristic optimization approach, termed LDOSOS, to detect leaks in pipe networks based on the combination of hydraulic transient flow simulations, OOA and SOS. Leaks in the pipes are represented by orifices. The PNSOS is used to determine the head at each node and the flow rate at each pipe before transient generation. To enhance the efficiency and accuracy of LDOSOS, a procedure is used to estimate the optimal transient generation point and its operation parameters. Moreover, the OOA is applied to sift the searching space. The top 25% CAPs with smaller OFVs are sifted, and the top 5% CASs are selected as the initial organisms for the ecosystem in SOS algorithm. After obtaining the OFVs of the initial organisms, LDOSOS identifies the leaks using three symbiotic states to guide the organisms forward and move toward the variable best organism (Xbest) with the smallest OFV.
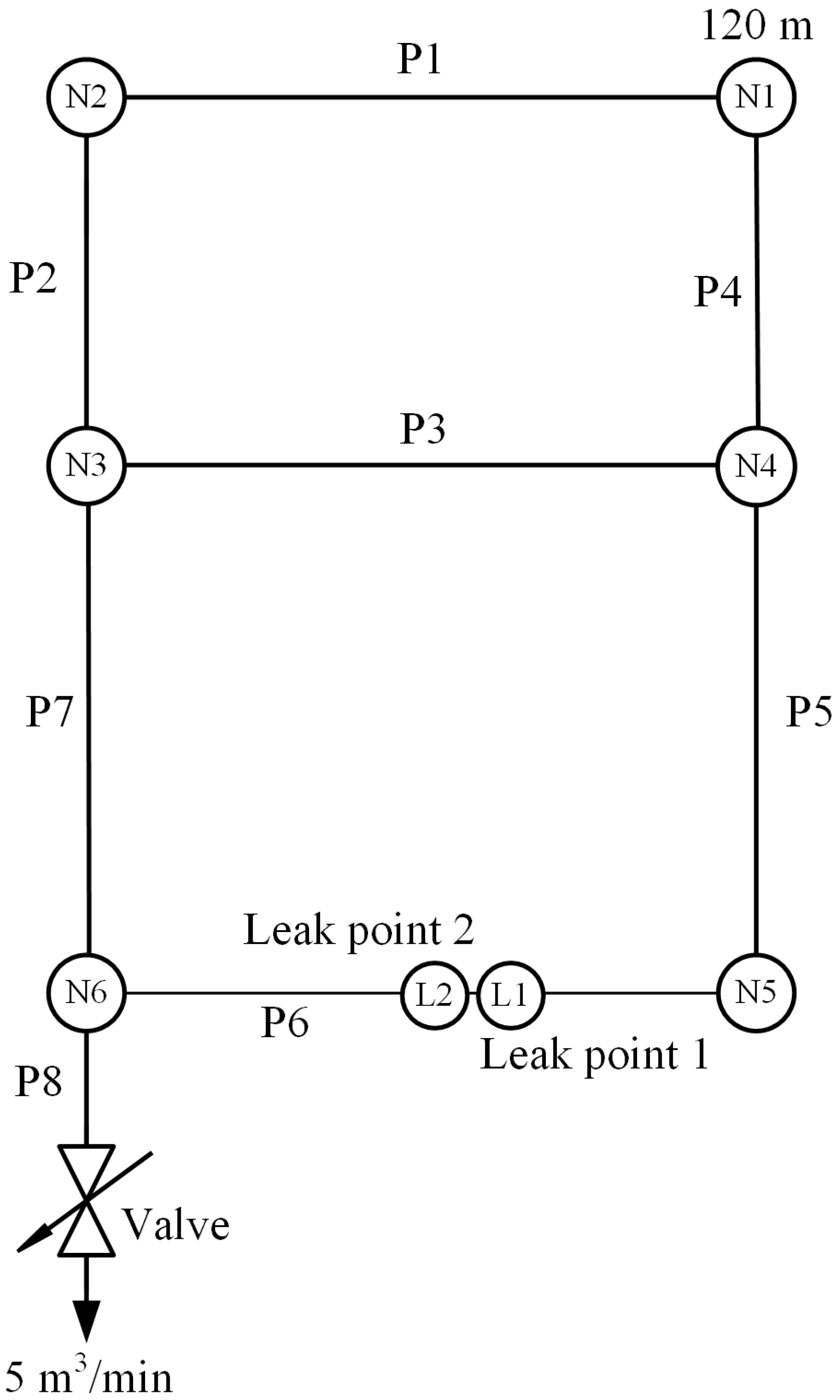
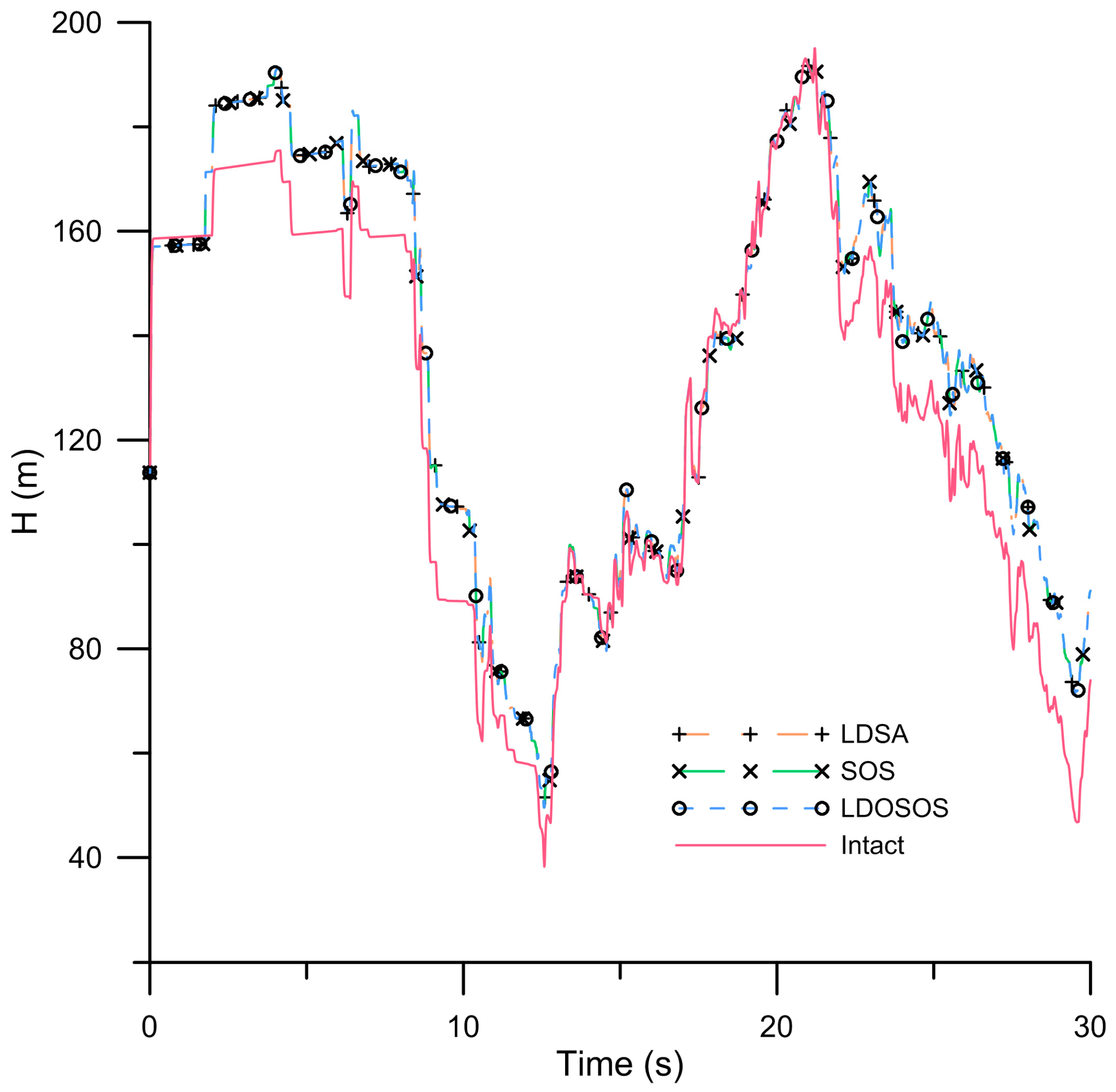
A pipe network with two leaks in the same pipe is first used to verify the ability of the proposed approach for leak detection. The temporal head distribution, leak locations, and CdAs are accurately predicted and agreed well with those from the other two algorithms. When these three algorithms are compared, LDOSOS had an approximately 86 and 58% better computing efficiency than LDSA and LDSOS. Moreover, the LDOSOS only takes about 50 min and 1469 iterations to obtain the optimal solution, implying that the searching space is largely reduced by the elimination procedure OOA, and the solutions quickly converged to the optimal solution during iterations. The simulation results show that LDOSOS not only greatly enhances the computation efficiency but also increases the convergence ability. On the other word, LDOSOS significantly outperforms LDSA and LDSOS.
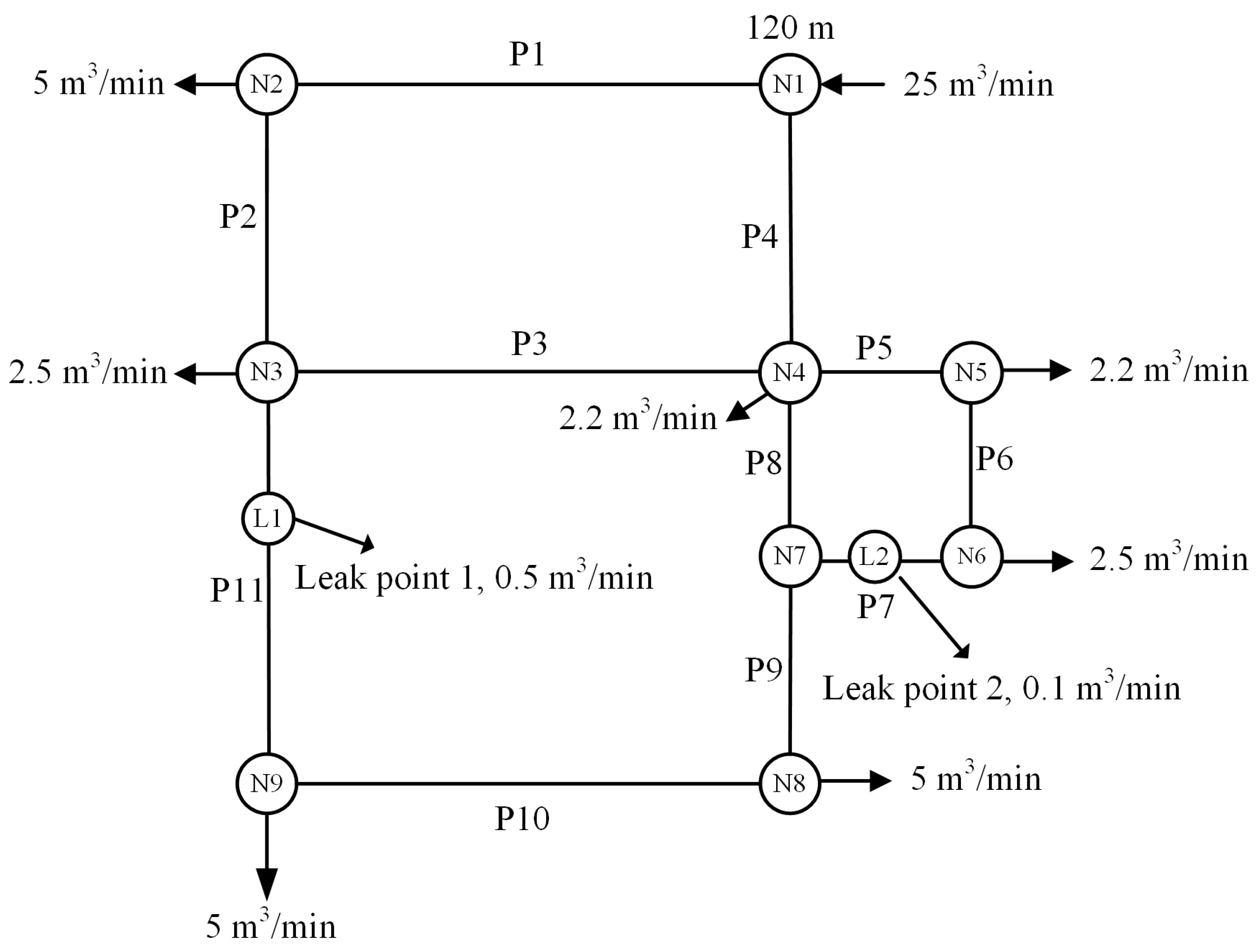
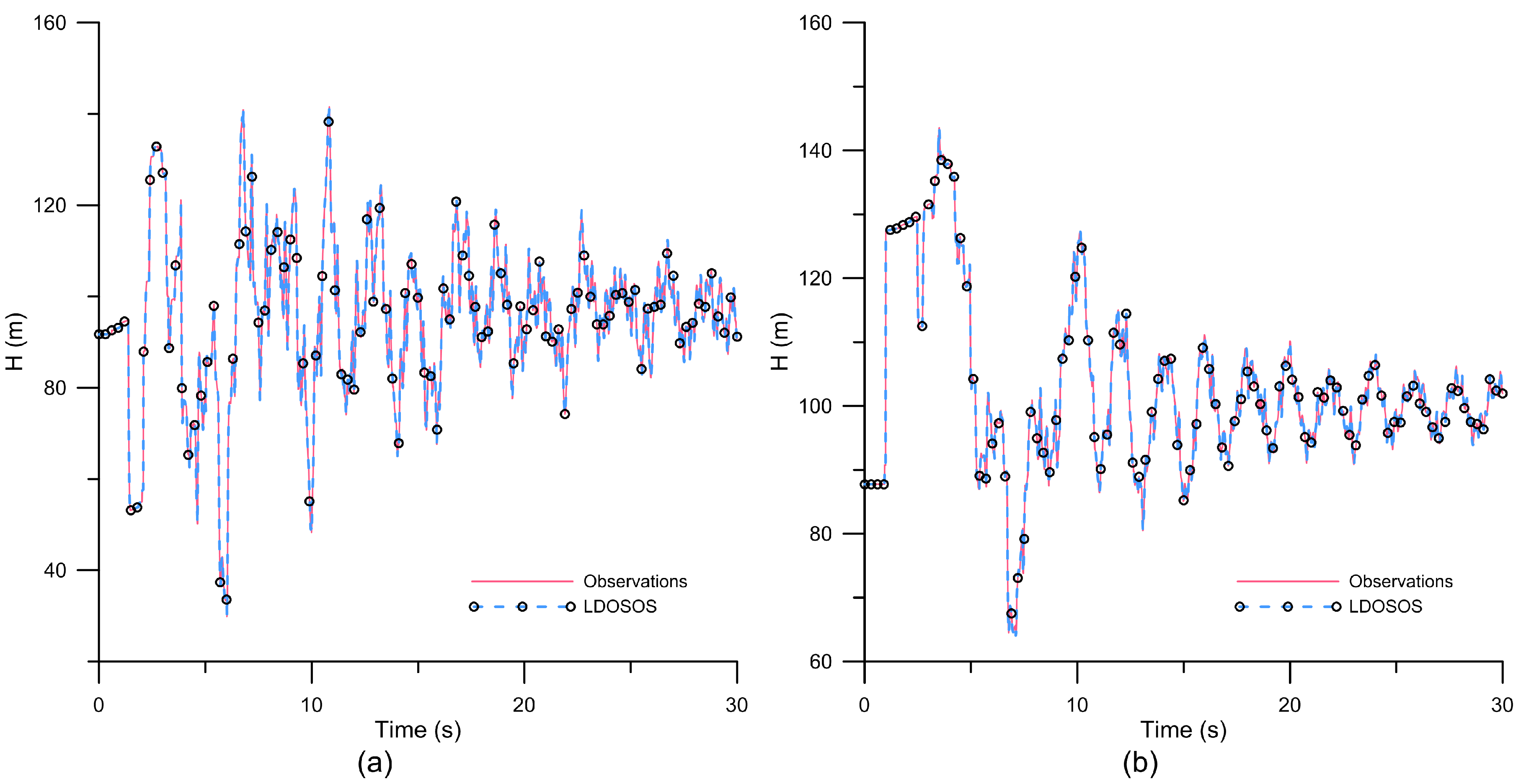
Using ITA for leak detection, the worst transient fluctuations with drastic changes are theoretically essential for good performance of ITA. The optimal transient energy estimation is used in the proposed approach to obtain the optimal transient generation point and its relevant parameters. On the basis of DMA, a WDN is used in this study consisting of 11 pipes, nine nodes, with several continuously outflows, and two potential leaks in two different pipes. The SOS is first used to optimize the operation parameter of three feasible transient generation points. N8 and N9 are then selected to compare the performance of LDOSOS using different transient generation points. The leak information is accurately predicted by LDOSOS with fairly high efficiency by using the best generation point N8 and relevant parameters. The detected results adopting the suboptimal generation point N9 yield a relative error of about 3.6% for the predicted leak area of L2. The results show that the optimal generation point and operation parameters provide more reliable results than other candidate generation points.
In summary, it has been demonstrated from the simulations that LDOSOS has the ability to detect the number of leaking pipe, location of the leak, and their size in a synthetic simple pipe network and a synthetic WDN. The proposed approach speeds up the ITA convergence and improves the reliability of the results. Moreover, the head at measurement point can be precisely computed by LDOSOS even the observations contained measurement errors. However, real drink water systems usually have more complicated pipe and system properties. Pipe characteristics in real situations will also be different if different pipe materials are used. We expect that we will be able improve the capability of LDOSOS to apply to real situations and provide a sound method to detect leaks in pipes in future work.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}