
A Review of Non-Contact Water Level Measurement Based on Computer Vision and Radar Technology



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Computer-Vision-Based Water Level Measurement
2.1. Water Line Detection
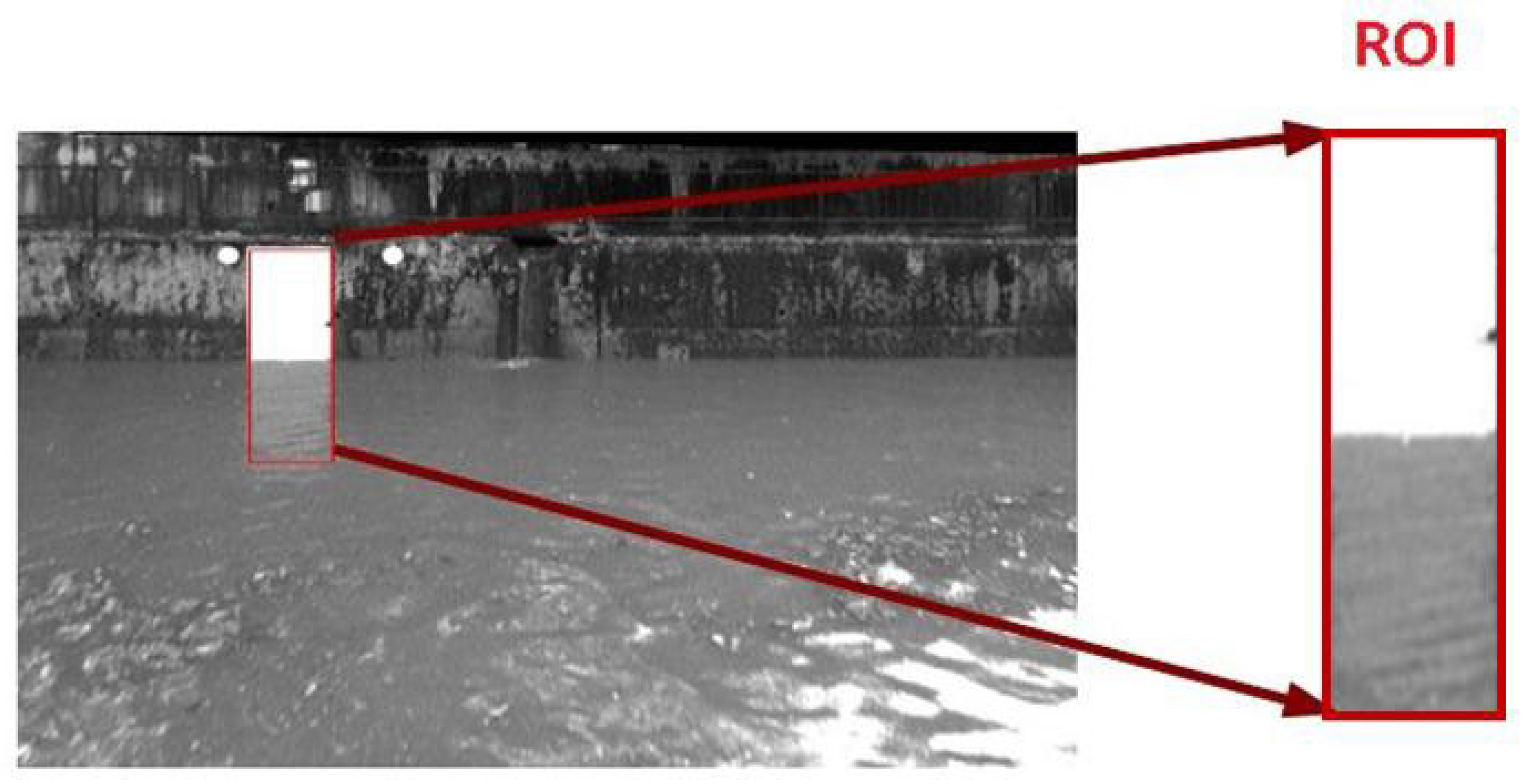
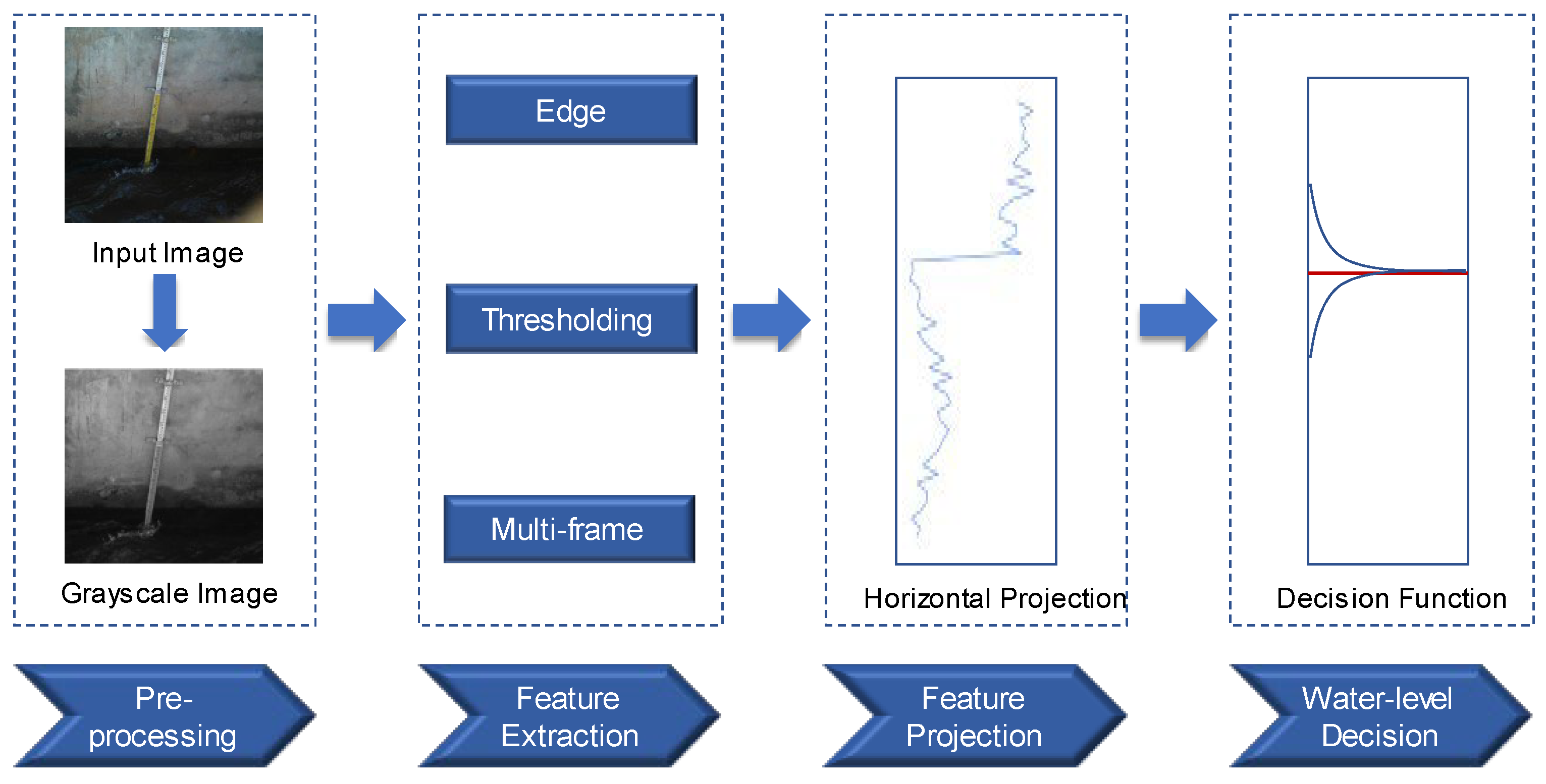
2.1.1. Horizontal Projection Methods
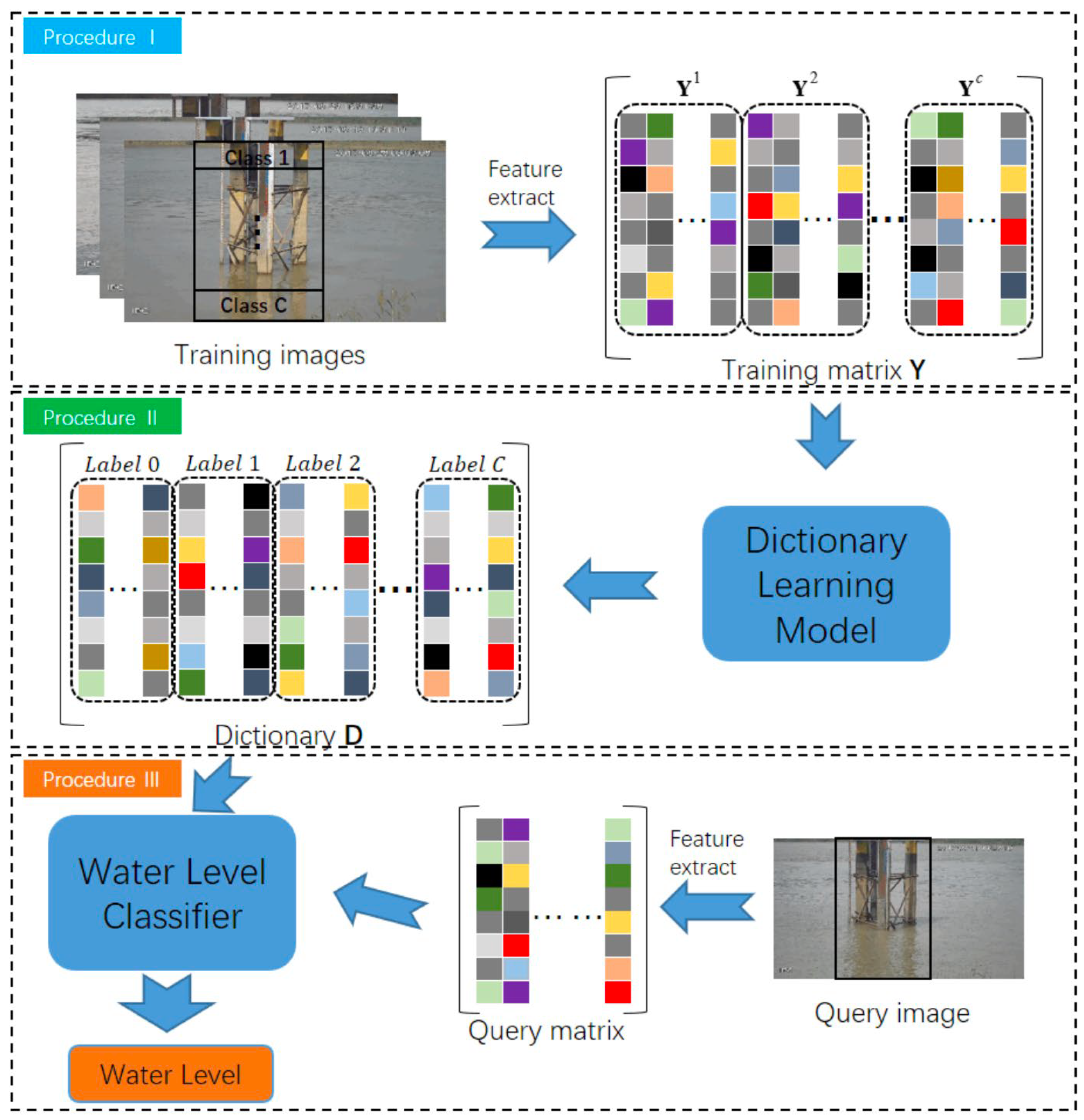
2.1.2. Dictionary Learning Methods
2.1.3. Deep Learning Methods
2.2. Water Gauge Reading Recognition Approaches
2.3. Photogrammetric Approaches
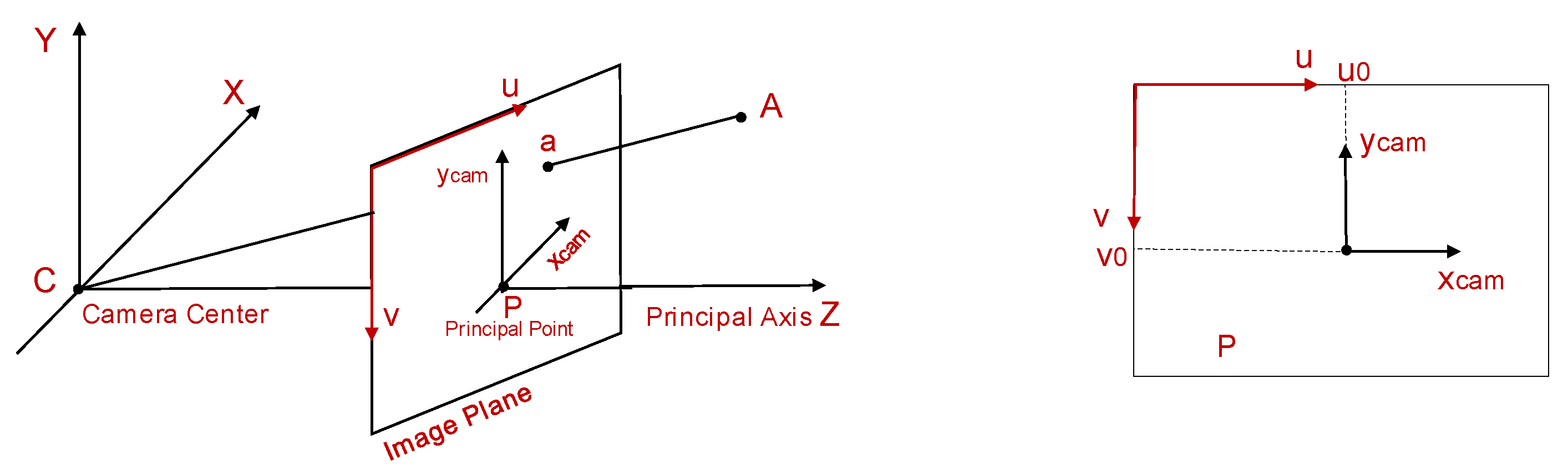
2.3.1. Pinhole Camera Model
2.3.2. Ground-Based Photogrammetric Approaches
2.3.3. UAV-Based Photogrammetric Approaches
3. Radar-Based Water Level Measurement
3.1. Principle of Radar Level Sensors
3.2. Workflow of Radar Level Sensors
3.2.1. Subsubsection
3.2.2. Signal Sampling
3.2.3. Signal Processing
4. Discussion
4.1. Advantages
4.2. Limitations
4.2.1. Limitations of the Computer-Vision-Based Methods
4.2.2. Limitations of the Radar-Based Methods
4.3. Future Works
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lin, F.; Yu, Z.; Jin, Q.; You, A. Semantic Segmentation and Scale Recognition–Based Water-Level Monitoring Algorithm. J. Coast. Res. 2020, 105, 185–189. [Google Scholar] [CrossRef]
- Lo, S.-W.; Wu, J.-H.; Lin, F.-P.; Hsu, C.-H. Visual Sensing for Urban Flood Monitoring. Sensors 2015, 15, 20006–20029. [Google Scholar] [CrossRef]
- Iqbal, U.; Perez, P.; Li, W.; Barthelemy, J. How computer vision can facilitate flood management: A systematic review. Int. J. Disaster Risk Reduct. 2021, 53, 102030. [Google Scholar] [CrossRef]
- Zheng, G.; Zong, H. High accuracy surface perceiving water level gauge with self calibration. In Proceedings of the 2009 International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 3680–3686. [Google Scholar] [CrossRef]
- Sweet, H.; Rosenthal, G.; Atwood, D. Water Level Monitoring—Achievable Accuracy and Precision. In Ground Water and Vadose Zone Monitoring; Nielsen, D., Johnson, A., Eds.; ASTM International: West Conshohocken, PA, USA, 1990; pp. 178–192. [Google Scholar] [CrossRef]
- Segovia-Cardozo, D.A.; Rodríguez-Sinobas, L.; Canales-Ide, F.; Zubelzu, S. Design and Field Implementation of a Low-Cost, Open-Hardware Platform for Hydrological Monitoring. Water 2021, 13, 3099. [Google Scholar] [CrossRef]
- Fulford, J.M.; Ester, L.W.; Heaton, J.W.; Committee on Irrigation and Drainage, P.U.S. Accuracy of Radar Water Level Measurements. In Proceedings of the USCID Fourth International Conference, Sacramento, CA, USA, 3–6 October 2007; Available online: https://mountainscholar.org/handle/10217/208297 (accessed on 8 July 2023).
- Pereira, T.S.R.; De Carvalho, T.P.; Mendes, T.A.; Formiga, K.T.M. Evaluation of Water Level in Flowing Channels Using Ultrasonic Sensors. Sustainability 2022, 14, 5512. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Rodríguez, E.; Lettenmaier, D.P. Measuring surface water from space. Rev. Geophys. 2007, 45, RG2002. [Google Scholar] [CrossRef]
- Brakenridge, G.R.; Nghiem, S.V.; Anderson, E.; Chien, S. Space-based measurement of river runoff. Eos Trans. Am. Geophys. Union 2005, 86, 185. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhou, Y.; Liu, H.; Zhang, L.; Wang, H. Visual Measurement of Water Level under Complex Illumination Conditions. Sensors 2019, 19, 4141. [Google Scholar] [CrossRef]
- Scherer, D.; Schwatke, C.; Dettmering, D.; Seitz, F. ICESat-2 Based River Surface Slope and Its Impact on Water Level Time Series From Satellite Altimetry. Water Resour. Res. 2022, 58, e2022WR032842. [Google Scholar] [CrossRef]
- Kuo, L.-C.; Tai, C.-C. Automatic water-level measurement system for confined-space applications. Rev. Sci. Instrum. 2021, 92, 085001. [Google Scholar] [CrossRef]
- Royem, A.A.; Mui, C.K.; Fuka, D.R.; Walter, M.T.; Note, T. Affordable, Accurate Stream Stage Monitoring System. Trans. ASABE 2012, 55, 2237–2242. [Google Scholar] [CrossRef]
- Etter, S.; Strobl, B.; Meerveld, I.; Seibert, J. Quality and timing of crowd-based water level class observations. Hydrol. Process. 2020, 34, 4365–4378. [Google Scholar] [CrossRef]
- Iqbal, U.; Riaz, M.Z.B.; Barthelemy, J.; Perez, P.; Idrees, M.B. The last two decades of computer vision technologies in water resource management: A bibliometric analysis. Water Environ. J. 2023, 37, 373–389. [Google Scholar] [CrossRef]
- Tauro, F.; Olivieri, G.; Petroselli, A.; Porfiri, M.; Grimaldi, S. Flow monitoring with a camera: A case study on a flood event in the Tiber River. Env. Monit. Assess. 2016, 188, 118. [Google Scholar] [CrossRef] [PubMed]
- Jiang, S.; Zheng, Y.; Babovic, V.; Tian, Y.; Han, F. A computer vision-based approach to fusing spatiotemporal data for hydrological modeling. J. Hydrol. 2018, 567, 25–40. [Google Scholar] [CrossRef]
- Liu, X.; Sahli, H.; Meng, Y.; Huang, Q.; Lin, L. Flood Inundation Mapping from Optical Satellite Images Using Spatiotemporal Context Learning and Modest AdaBoost. Remote Sens. 2017, 9, 617. [Google Scholar] [CrossRef]
- Allamano, P.; Croci, A.; Laio, F. Toward the camera rain gauge. Water Resour. Res. 2015, 51, 1744–1757. [Google Scholar] [CrossRef]
- Jiang, S.; Babovic, V.; Zheng, Y.; Xiong, J. Advancing Opportunistic Sensing in Hydrology: A Novel Approach to Measuring Rainfall With Ordinary Surveillance Cameras. Water Resour. Res. 2019, 55, 3004–3027. [Google Scholar] [CrossRef]
- Yan, K.; Chen, H.; Hu, L.; Huang, K.; Huang, Y.; Wang, Z.; Liu, B.; Wang, J.; Guo, S. A review of video-based rainfall measurement methods. WIREs Water 2023, e1678. [Google Scholar] [CrossRef]
- Kuswidiyanto, L.W.; Nugroho, A.P.; Jati, A.W.; Wismoyo, G.W.; Murtiningrum; Arif, S.S. Automatic water level monitoring system based on computer vision technology for supporting the irrigation modernization. IOP Conf. Ser. Earth Environ. Sci. 2021, 686, 012055. [Google Scholar] [CrossRef]
- Kim, K.J.; Park, K.S.; Park, K.S.; Choi, S.K. Development of Automatic Water Level Measuring System Using Stereo Images. kogsis 2018, 26, 77–86. [Google Scholar] [CrossRef]
- Tauro, F. Particle tracers and image analysis for surface flow observations. WIREs Water 2016, 3, 25–39. [Google Scholar] [CrossRef]
- Perks, M.T.; Sasso, S.F.D.; Hauet, A.; Jamieson, E.; Le Coz, J.; Pearce, S.; Peña-Haro, S.; Pizarro, A.; Strelnikova, D.; Tauro, F.; et al. Towards harmonisation of image velocimetry techniques for river surface velocity observations. Earth Syst. Sci. Data 2020, 12, 1545–1559. [Google Scholar] [CrossRef]
- Huang, K.; Chen, H.; Xiang, T.; Lin, Y.; Liu, B.; Wang, J.; Liu, D.; Xu, C.-Y. A photogrammetry-based variational optimization method for river surface velocity measurement. J. Hydrol. 2022, 605, 127240. [Google Scholar] [CrossRef]
- Pan, J.; Yin, Y.; Xiong, J.; Luo, W.; Gui, G.; Sari, H. Deep Learning-Based Unmanned Surveillance Systems for Observing Water Levels. IEEE Access 2018, 6, 73561–73571. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhou, Y.; Liu, H.; Gao, H. In-situ water level measurement using NIR-imaging video camera. Flow Meas. Instrum. 2019, 67, 95–106. [Google Scholar] [CrossRef]
- Birgand, F.; Chapman, K.; Hazra, A.; Gilmore, T.; Etheridge, R.; Staicu, A.-M. Field performance of the GaugeCam image-based water level measurement system. PLoS Water 2022, 1, e0000032. [Google Scholar] [CrossRef]
- Boon, J.D.; Heitsenrether, R.M.; Hensley, W.M. Multi-sensor evaluation of microwave water level measurement error. In Proceedings of the 2012 Oceans Hampton Roads, Hampton Roads, VA, USA, 14–19 October 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Míguez, B.M.; Le Roy, R.; Wöppelmann, G. The Use of Radar Tide Gauges to Measure Variations in Sea Level along the French Coast. J. Coast. Res. 2008, 4, 61–68. [Google Scholar] [CrossRef]
- Stateczny, A.; Lubczonek, J. Radar sensors implementation in river information services in Poland. In Proceedings of the 2014 15th International Radar Symposium (IRS), Gdansk, Poland, 16–8 June 2014; pp. 1–5. [Google Scholar] [CrossRef]
- Cui, J.; Bachmayer, R.; deYoung, B.; Huang, W. Ocean Wave Measurement Using Short-Range K-Band Narrow Beam Continuous Wave Radar. Remote Sens. 2018, 10, 1242. [Google Scholar] [CrossRef]
- Fiorentino, L.A.; Heitsenrether, R.; Krug, W. Wave Measurements From Radar Tide Gauges. Front. Mar. Sci. 2019, 6, 586. [Google Scholar] [CrossRef]
- Ma, M.; Li, Y.; Jiang, X.; Huang, X. Hydrological Information Measurement Using an MM-Wave FMCW Radar. In Proceedings of the 2020 International Conference on Microwave and Millimeter Wave Technology (ICMMT), Shanghai, China, 20–23 September 2020; pp. 1–3. [Google Scholar] [CrossRef]
- Park, J.; Heitsenrether, R.; Sweet, W. Water Level and Wave Height Estimates at NOAA Tide Stations from Acoustic and Microwave Sensors. J. Atmos. Ocean. Technol. 2014, 31, 2294–2308. [Google Scholar] [CrossRef]
- Tauro, F.; Selker, J.; van de Giesen, N.; Abrate, T.; Uijlenhoet, R.; Porfiri, M.; Manfreda, S.; Caylor, K.; Moramarco, T.; Benveniste, J.; et al. Measurements and Observations in the XXI century (MOXXI): Innovation and multi-disciplinarity to sense the hydrological cycle. Hydrol. Sci. J. 2018, 63, 169–196. [Google Scholar] [CrossRef]
- Vélez-Nicolás, M.; García-López, S.; Barbero, L.; Ruiz-Ortiz, V.; Sánchez-Bellón, Á. Applications of Unmanned Aerial Systems (UASs) in Hydrology: A Review. Remote Sens. 2021, 13, 1359. [Google Scholar] [CrossRef]
- Altenau, E.H.; Pavelsky, T.M.; Moller, D.; Lion, C.; Pitcher, L.H.; Allen, G.H.; Bates, P.D.; Calmant, S.; Durand, M.; Smith, L.C. AirSWOT measurements of river water surface elevation and slope: Tanana River, AK. Geophys. Res. Lett. 2017, 44, 181–189. [Google Scholar] [CrossRef]
- Bandini, F.; Jakobsen, J.; Olesen, D.; Reyna-Gutierrez, J.A.; Bauer-Gottwein, P. Measuring water level in rivers and lakes from lightweight Unmanned Aerial Vehicles. J. Hydrol. 2017, 548, 237–250. [Google Scholar] [CrossRef]
- Jiang, L.; Bandini, F.; Smith, O.; Jensen, I.K.; Bauer-Gottwein, P. The Value of Distributed High-Resolution UAV-Borne Observations of Water Surface Elevation for River Management and Hydrodynamic Modeling. Remote Sens. 2020, 12, 1171. [Google Scholar] [CrossRef]
- Hies, T. Enhanced water-level detection by image processing. In Proceedings of the 10th International Conference on Hydroinformatics, Hamburg, Germany, 14–18 July 2012. [Google Scholar]
- Udomsiri, S.; Iwahashi, M.; Muramatsu, S. Functionally Layered Video Coding for Water Level Monitoring. IEICE Trans. Fundam. Electron. Commun. Comput. Sci. 2008, E91-A, 1006–1014. [Google Scholar] [CrossRef]
- Shin, I.; Kim, J.; Lee, S.-G. Development of an internet-based water-level monitoring and measuring system using CCD camera. In Proceedings of the International Workshop and Conference on Photonics and Nanotechnology, Pattaya, Thailand, 16–18 December 2007; p. 67944. [Google Scholar] [CrossRef]
- Noto, S.; Tauro, F.; Petroselli, A.; Apollonio, C.; Botter, G.; Grimaldi, S. Low-cost stage-camera system for continuous water-level monitoring in ephemeral streams. Hydrol. Sci. J. 2022, 67, 1439–1448. [Google Scholar] [CrossRef]
- Lin, F.; Chang, W.-Y.; Lee, L.-C.; Hsiao, H.-T.; Tsai, W.-F.; Lai, J.-S. Applications of Image Recognition for Real-Time Water Level and Surface Velocity. In Proceedings of the 2013 IEEE International Symposium on Multimedia, Anaheim, CA, USA, 9–11 December 2013; pp. 259–262. [Google Scholar] [CrossRef]
- Zhang, C.; Zhu, Y.; Huang, M.; Li, C. Development of Automatic Water Level Monitor for Reservoir Based on Image Recognition. J. Phys. Conf. Ser. 2019, 1176, 052032. [Google Scholar] [CrossRef]
- Xu, Z.; Feng, J.; Zhang, Z.; Duan, C. Water Level Estimation Based on Image of Staff Gauge in Smart City. In Proceedings of the 2018 IEEE SmartWorld Ubiquitous Intelligence & Computing, Advanced & Trusted Computing, Scalable Computing & Communications, Cloud & Big Data Computing, Internet of People and Smart City Innovation (SmartWorld/SCALCOM/UIC/ATC/CBDCom/IOP/SCI), Guangzhou, China, 8–12 October 2018; pp. 1341–1345. [Google Scholar] [CrossRef]
- Chen, G.; Bai, K.; Lin, Z.; Liao, X.; Liu, S.; Lin, Z.; Zhang, Q.; Jia, X. Method on water level ruler reading recognition based on image processing. Signal Image Video Process. 2021, 15, 33–41. [Google Scholar] [CrossRef]
- Cai, Z.; Sun, L.; An, B.; Zhong, X.; Yang, W.; Wang, Z.; Zhou, Y.; Zhan, F.; Wang, X. Automatic Monitoring Alarm Method of Dammed Lake Based on Hybrid Segmentation Algorithm. Sensors 2023, 23, 4714. [Google Scholar] [CrossRef] [PubMed]
- Park, S.; Lee, N.; Han, Y.; Hahn, H. The Water Level Detection Algorithm Using The Accumulated Histogram With Band Pass Filter. World Acad. Sci. Eng. Technol. Int. J. Comput. Inf. Eng. 2009, 3, 2151–2155. [Google Scholar] [CrossRef]
- Kim, J.; Han, Y.; Hahn, H. Embedded implementation of image-based water-level measurement system. IET Comput. Vis. 2011, 5, 125. [Google Scholar] [CrossRef]
- Pan, J.; Fan, Y.; Dong, H.; Fan, S.; Xiong, J.; Gui, G. Image-Based Detecting the Level of Water Using Dictionary Learning. In Communications Signal Processing, and Systems; Liang, Q., Liu, X., Na, Z., Wang, W., Mu, J., Zhang, B., Eds.; Springer: Singapore, 2020; Volume 516, pp. 20–27. [Google Scholar] [CrossRef]
- Muhammad, K.; Ahmad, J.; Baik, S.W. Early fire detection using convolutional neural networks during surveillance for effective disaster management. Neurocomputing 2018, 288, 30–42. [Google Scholar] [CrossRef]
- Bai, G.; Hou, J.; Zhang, Y.; Li, B.; Han, H.; Wang, T.; Hinkelmann, R.; Zhang, D.; Guo, L. An intelligent water level monitoring method based on SSD algorithm. Measurement 2021, 185, 110047. [Google Scholar] [CrossRef]
- Liang, Y.; Jafari, N.; Luo, X.; Chen, Q.; Cao, Y.; Li, X. WaterNet: An adaptive matching pipeline for segmenting water with volatile appearance. Comp. Vis. Media 2020, 6, 65–78. [Google Scholar] [CrossRef]
- Jafari, N.H.; Li, X.; Chen, Q.; Le, C.-Y.; Betzer, L.P.; Liang, Y. Real-time water level monitoring using live cameras and computer vision techniques. Comput. Geosci. 2021, 147, 104642. [Google Scholar] [CrossRef]
- Xie, Z.; Jin, J.; Wang, J.; Zhang, R.; Li, S. Application of Deep Learning Techniques in Water Level Measurement: Combining Improved SegFormer-UNet Model with Virtual Water Gauge. Appl. Sci. 2023, 13, 5614. [Google Scholar] [CrossRef]
- Vandaele, R.; Dance, S.L.; Ojha, V. Deep learning for automated river-level monitoring through river-camera images: An approach based on water segmentation and transfer learning. Hydrol. Earth Syst. Sci. 2021, 25, 4435–4453. [Google Scholar] [CrossRef]
- Zhang, D.; Tong, J. Robust water level measurement method based on computer vision. J. Hydrol. 2023, 620, 129456. [Google Scholar] [CrossRef]
- Bruinink, M.; Chandarr, A.; Rudinac, M.; van Overloop, P.-J.; Jonker, P. Portable, automatic water level estimation using mobile phone cameras’. In Proceedings of the 2015 14th IAPR International Conference on Machine Vision Applications (MVA), Tokyo, Japan, 18–22 May 2015; pp. 426–429. [Google Scholar] [CrossRef]
- Guo, S.; Zhang, Y.; Liu, Y. A Water-Level Measurement Method Using Sparse Representation. Aut. Control Comp. Sci. 2020, 54, 302–312. [Google Scholar] [CrossRef]
- Qiao, G.; Yang, M.; Wang, H. A Water Level Measurement Approach Based on YOLOv5s. Sensors 2022, 22, 3714. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Fu, R.; Ai, X.; Huang, C.; Cong, L.; Li, X.; Jiang, J.; Pei, Q. An Integrated Method for River Water Level Recognition from Surveillance Images Using Convolution Neural Networks. Remote Sens. 2022, 14, 6023. [Google Scholar] [CrossRef]
- Qiu, R.; Cai, Z.; Chang, Z.; Liu, S.; Tu, G. A two-stage image process for water level recognition via dual-attention CornerNet and CTransformer. Vis. Comput. 2022, 39, 2933–2952. [Google Scholar] [CrossRef]
- De, O.G.R.; Nascimento, D.V.D.; Filho, A.R.G.; Ribeiro, F.D.S.L.; de Carvalho, R.V.; Coelho, C.J. Image-Based River Water Level Estimation for Redundancy Information Using Deep Neural Network. Energies 2020, 13, 6706. [Google Scholar] [CrossRef]
- Sturm, P. Pinhole Camera Model. In Computer Vision; Ikeuchi, K., Ed.; Springer: Boston, MA, USA, 2014; pp. 610–613. [Google Scholar] [CrossRef]
- Yu, J.; Hahn, H. Remote Detection and Monitoring of a Water Level Using Narrow Band Channel. J. Inf. Sci. Eng. 2010, 26, 71–82. [Google Scholar]
- Gilmore, T.E.; Birgand, F.; Chapman, K.W. Source and magnitude of error in an inexpensive image-based water level measurement system. J. Hydrol. 2013, 496, 178–186. [Google Scholar] [CrossRef]
- Chapman, K.W.; Gilmore, T.E.; Chapman, C.D.; Birgand, F.; Mittelstet, A.R.; Harner, M.J.; Mehrubeoglu, M.; Stranzl, J.E. Technical Note: Open-Source Software for Water-Level Measurement in Images With a Calibration Target. Water Resour. Res. 2022, 58, e2022WR033203. [Google Scholar] [CrossRef]
- Lin, Y.-T.; Lin, Y.-C.; Han, J.-Y. Automatic water-level detection using single-camera images with varied poses. Measurement 2018, 127, 167–174. [Google Scholar] [CrossRef]
- Kuo, L.-C.; Tai, C.-C. Robust Image-Based Water-Level Estimation Using Single-Camera Monitoring. IEEE Trans. Instrum. Meas. 2022, 71, 1–11. [Google Scholar] [CrossRef]
- Azevedo, J.A.; Brás, J.A. Measurement of Water Level in Urban Streams under Bad Weather Conditions. Sensors 2021, 21, 7157. [Google Scholar] [CrossRef] [PubMed]
- Elias, M.; Kehl, C.; Schneider, D. Photogrammetric water level determination using smartphone technology. Photogram. Rec. 2019, 34, 198–223. [Google Scholar] [CrossRef]
- Eltner, A.; Bressan, P.O.; Akiyama, T.; Gonçalves, W.N.; Junior, J.M. Using Deep Learning for Automatic Water Stage Measurements. Water Resour. Res. 2021, 57, e2020WR027608. [Google Scholar] [CrossRef]
- Ridolfi, E.; Manciola, P. Water Level Measurements from Drones: A Pilot Case Study at a Dam Site. Water 2018, 10, 297. [Google Scholar] [CrossRef]
- Gao, A.; Wu, S.; Wang, F.; Wu, X.; Xu, P.; Yu, L.; Zhu, S. A Newly Developed Unmanned Aerial Vehicle (UAV) Imagery Based Technology for Field Measurement of Water Level. Water 2019, 11, 124. [Google Scholar] [CrossRef]
- Xu, Z.; Wu, L.; Shen, Y.; Li, F.; Wang, Q.; Wang, R. Tridimensional Reconstruction Applied to Cultural Heritage with the Use of Camera-Equipped UAV and Terrestrial Laser Scanner. Remote Sens. 2014, 6, 10413–10434. [Google Scholar] [CrossRef]
- Pai, H.; Malenda, H.F.; Briggs, M.A.; Singha, K.; González-Pinzón, R.; Gooseff, M.N.; Tyler, S.W. Potential for Small Unmanned Aircraft Systems Applications for Identifying Groundwater-Surface Water Exchange in a Meandering River Reach. Geophys. Res. Lett. 2017, 44, 11868–11877. [Google Scholar] [CrossRef]
- Giulietti, N.; Allevi, G.; Castellini, P.; Garinei, A.; Martarelli, M. Rivers’ Water Level Assessment Using UAV Photogrammetry and RANSAC Method and the Analysis of Sensitivity to Uncertainty Sources. Sensors 2022, 22, 5319. [Google Scholar] [CrossRef]
- Lin, Y.-T.; Yang, M.-D.; Han, J.-Y.; Su, Y.-F.; Jang, J.-H. Quantifying Flood Water Levels Using Image-Based Volunteered Geographic Information. Remote Sens. 2020, 12, 706. [Google Scholar] [CrossRef]
- Nowak, M.J.; Zhang, Z.; LoMonte, L.; Wicks, M.; Wu, Z. Mixed-modulated linear frequency modulated radar-communications. IET Radar Sonar Navig. 2017, 11, 313–320. [Google Scholar] [CrossRef]
- Brennan, P.V.; Huang, Y.; Ash, M.; Chetty, K. Determination of Sweep Linearity Requirements in FMCW Radar Systems Based on Simple Voltage-Controlled Oscillator Sources. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1594–1604. [Google Scholar] [CrossRef]
- Smith, G.E.; Diethe, T.; Hussain, Z.; Shawe-Taylor, J.; Hardoon, D.R. Compressed Sampling for pulse Doppler radar. In Proceedings of the 2010 IEEE Radar Conference, Washington DC, USA, 10–14 May 2010; pp. 887–892. [Google Scholar] [CrossRef]
- Tokieda, Y.; Sugawara, H.; Niimura, S.; Fujise, T. High Precision Waterlevel Gauge with an FMCW Radar Under Limited Bandwidth. In Proceedings of the European Radar Conference 2005. EURAD 2005, Paris, France, 6–7 October 2005; pp. 355–358. [Google Scholar] [CrossRef]
- Piotrowsky, L.; Jaeschke, T.; Kueppers, S.; Siska, J.; Pohl, N. Enabling High Accuracy Distance Measurements With FMCW Radar Sensors. IEEE Trans. Microw. Theory Technol. 2019, 67, 5360–5371. [Google Scholar] [CrossRef]
- Guan, S.; Bridge, J.A.; Davis, J.R.; Li, C. Compact Continuous Wave Radar for Water Level Monitoring. J. Atmos. Ocean. Technol. 2022, 39, 1245–1257. [Google Scholar] [CrossRef]
- Eltner, A.; Elias, M.; Sardemann, H.; Spieler, D. Automatic Image-Based Water Stage Measurement for Long-Term Observations in Ungauged Catchments. Water Resour. Res. 2018, 54, 10–362. [Google Scholar] [CrossRef]
- Liu, W.-C.; Chung, C.-K.; Huang, W.-C. Image-based recognition and processing system for monitoring water levels in an irrigation and drainage channel. Paddy Water Environ. 2023, 21, 417–431. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Bourdev, L.; Girshick, R.; Hays, J.; Perona, P.; Zitnick, C.L.; Dollár, P. Microsoft COCO: Common Objects in Context. In Computer Vision—ECCV 2014; Lecture Notes in Computer, Science; Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer International Publishing: Cham, Switzerland, 2014; Volume 8693, pp. 740–755. [Google Scholar] [CrossRef]
- Zhou, B.; Zhao, H.; Puig, X.; Xiao, T.; Fidler, S.; Barriuso, A.; Torralba, A. Semantic Understanding of Scenes Through the ADE20K Dataset. Int. J. Comput. Vis. 2019, 127, 302–321. [Google Scholar] [CrossRef]
- Bandini, F.; Sunding, T.P.; Linde, J.; Smith, O.; Jensen, I.K.; Köppl, C.J.; Butts, M.; Bauer-Gottwein, P. Unmanned Aerial System (UAS) observations of water surface elevation in a small stream: Comparison of radar altimetry, LIDAR and photogrammetry techniques. Remote Sens. Environ. 2020, 237, 111487. [Google Scholar] [CrossRef]
- Bhutani, A.; Marahrens, S.; Gehringer, M.; Göttel, B.; Pauli, M.; Zwick, T. The Role of Millimeter-Waves in the Distance Measurement Accuracy of an FMCW Radar Sensor. Sensors 2019, 19, 3938. [Google Scholar] [CrossRef]
- Lowry, C.S.; Fienen, M.N. CrowdHydrology: Crowdsourcing Hydrologic Data and Engaging Citizen Scientists. Ground Water 2013, 51, 151–156. [Google Scholar] [CrossRef]
- Etter, S.; Strobl, B.; Seibert, J.; Meerveld, H.J.I. Value of Crowd-Based Water Level Class Observations for Hydrological Model Calibration. Water Resour. Res. 2020, 56, e2019WR026108. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Z.; Huang, Y.; Huang, K.; Yan, K.; Chen, H. A Review of Non-Contact Water Level Measurement Based on Computer Vision and Radar Technology. Water 2023, 15, 3233. https://doi.org/10.3390/w15183233
Wu Z, Huang Y, Huang K, Yan K, Chen H. A Review of Non-Contact Water Level Measurement Based on Computer Vision and Radar Technology. Water. 2023; 15(18):3233. https://doi.org/10.3390/w15183233
Chicago/Turabian StyleWu, Zeheng, Yu Huang, Kailin Huang, Kang Yan, and Hua Chen. 2023. "A Review of Non-Contact Water Level Measurement Based on Computer Vision and Radar Technology" Water 15, no. 18: 3233. https://doi.org/10.3390/w15183233