
On the Variability of In Situ Surface Layer Refractivity Measurements

Abstract
:1. Introduction
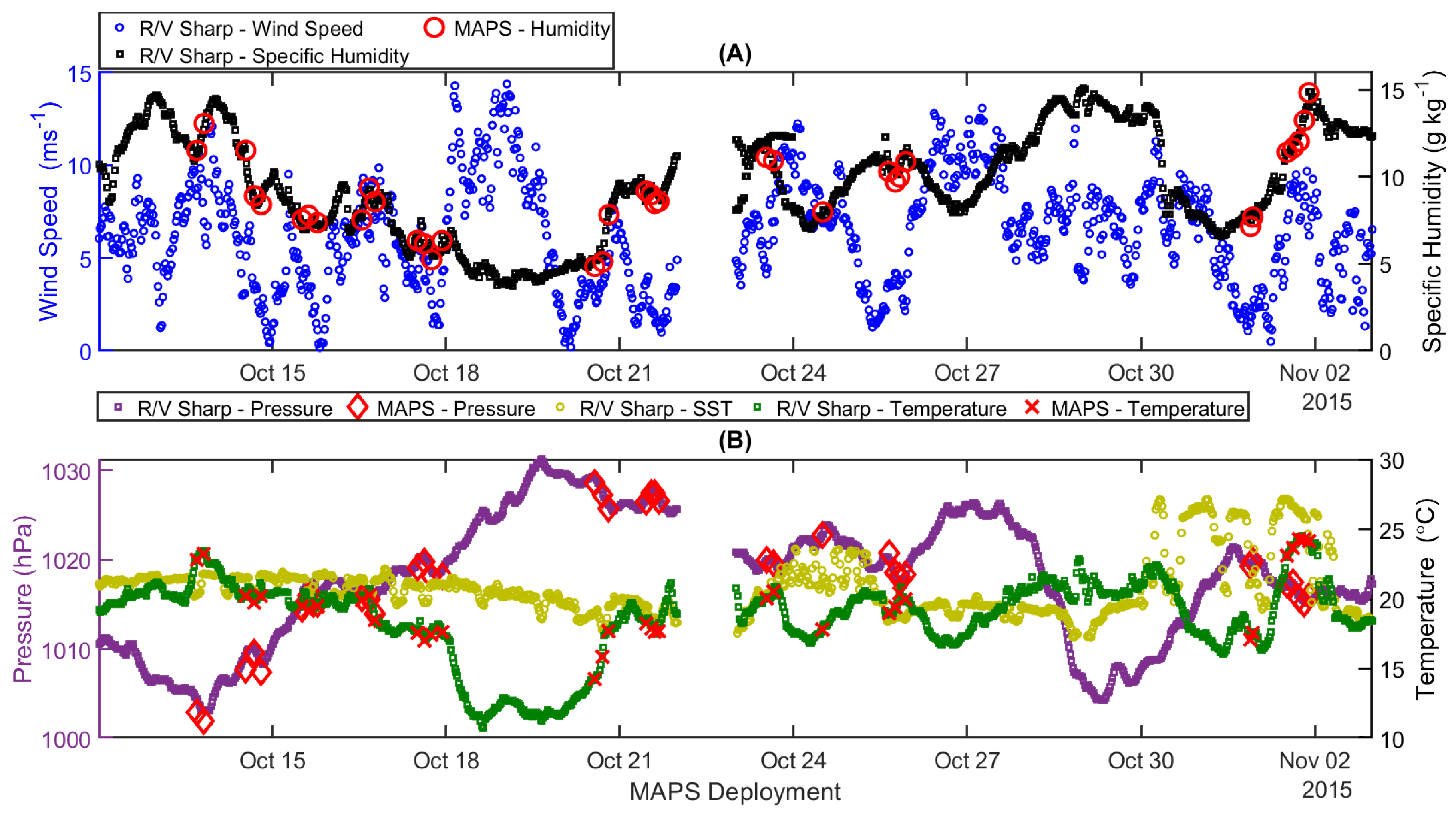
2. CASPER-East Measurements
3. Turbulent Refractive Index Fluctuations Model (TRIF)
3.1. Spectral Modeling of Tubulent Refractive Index Fluctuations
3.2. NAVSLaM Estimates of
4. Particle Swarm Optimization
5. Results and Discussion
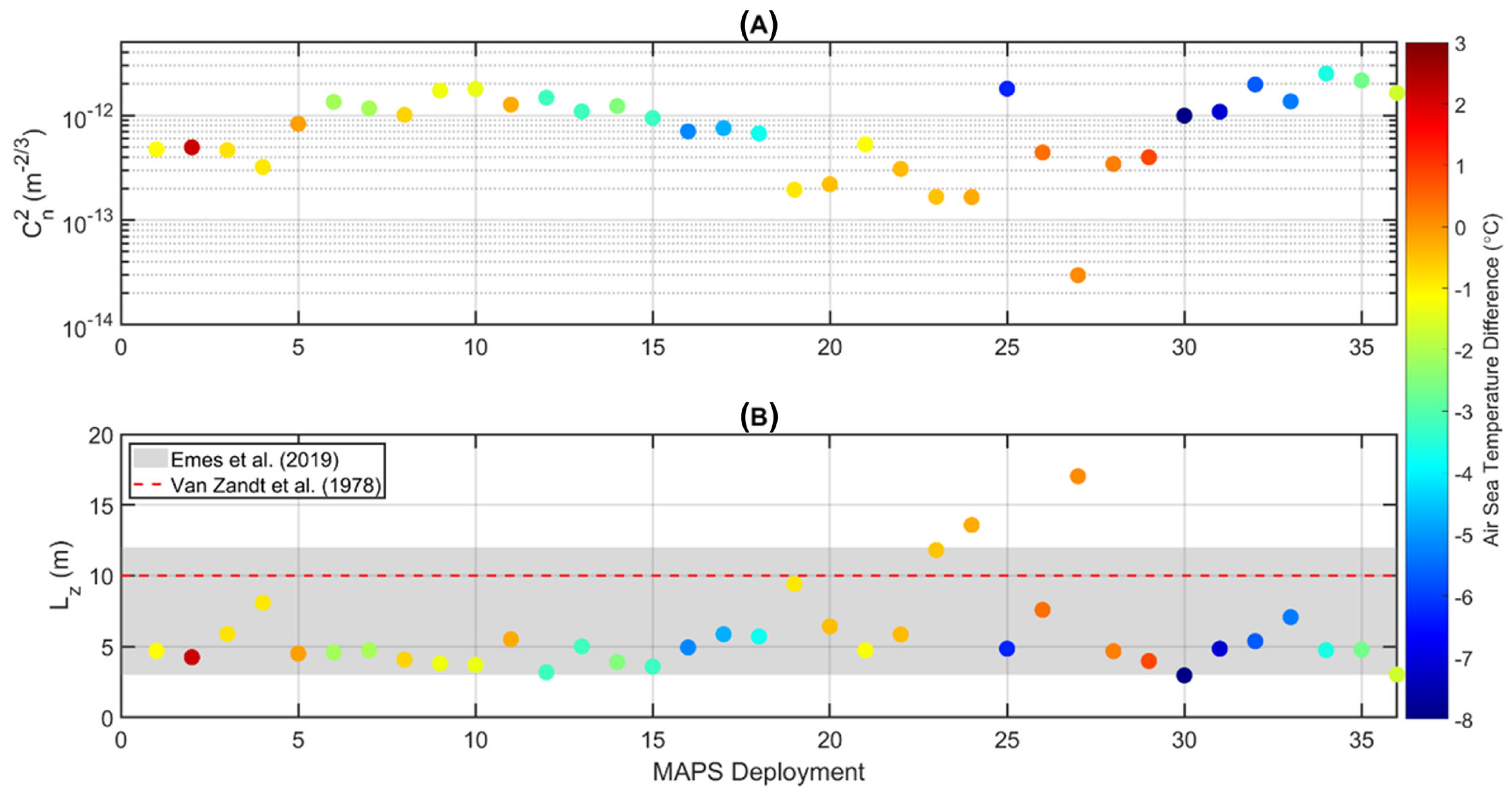
5.1. Vertical Length Scale—
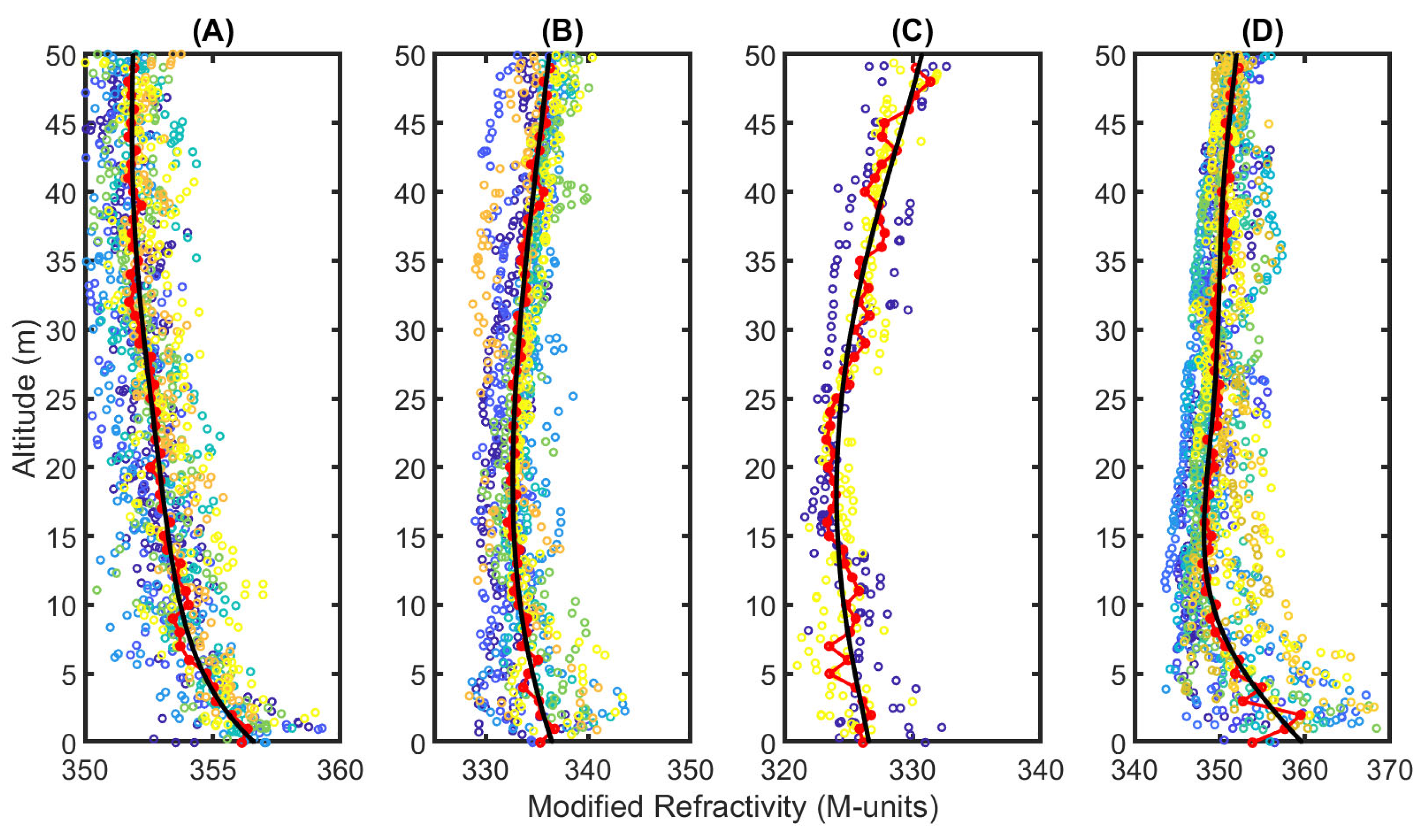
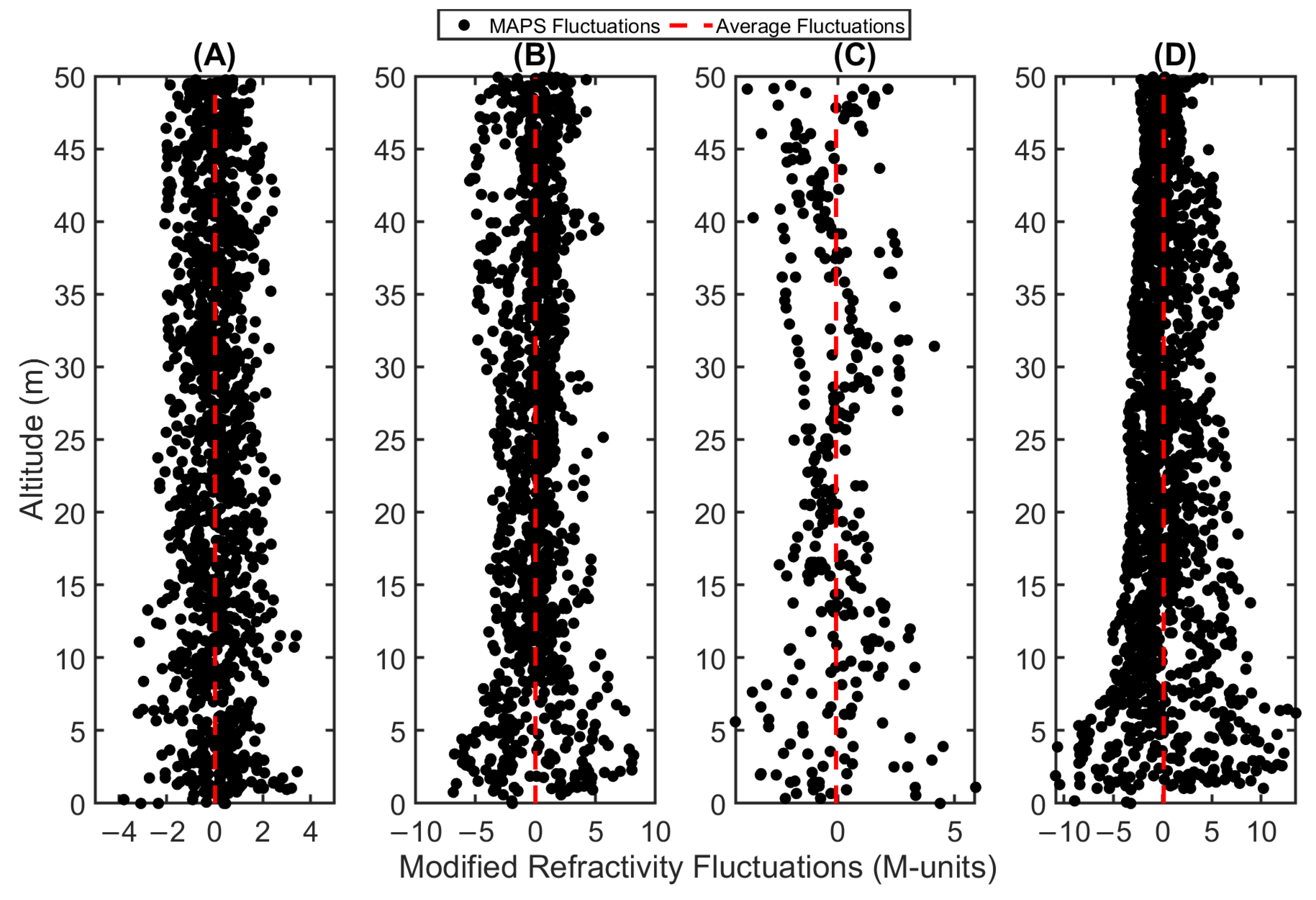
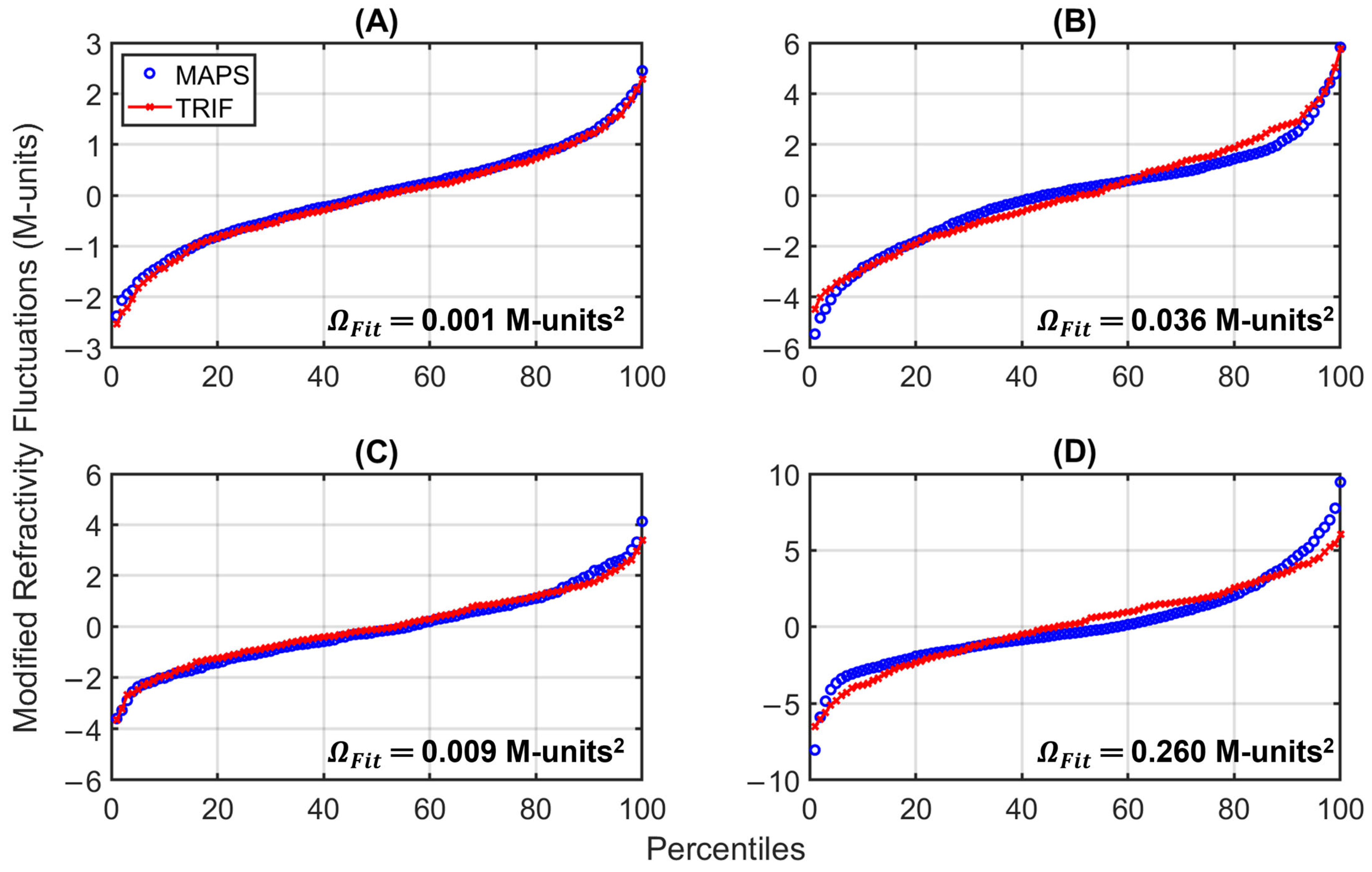
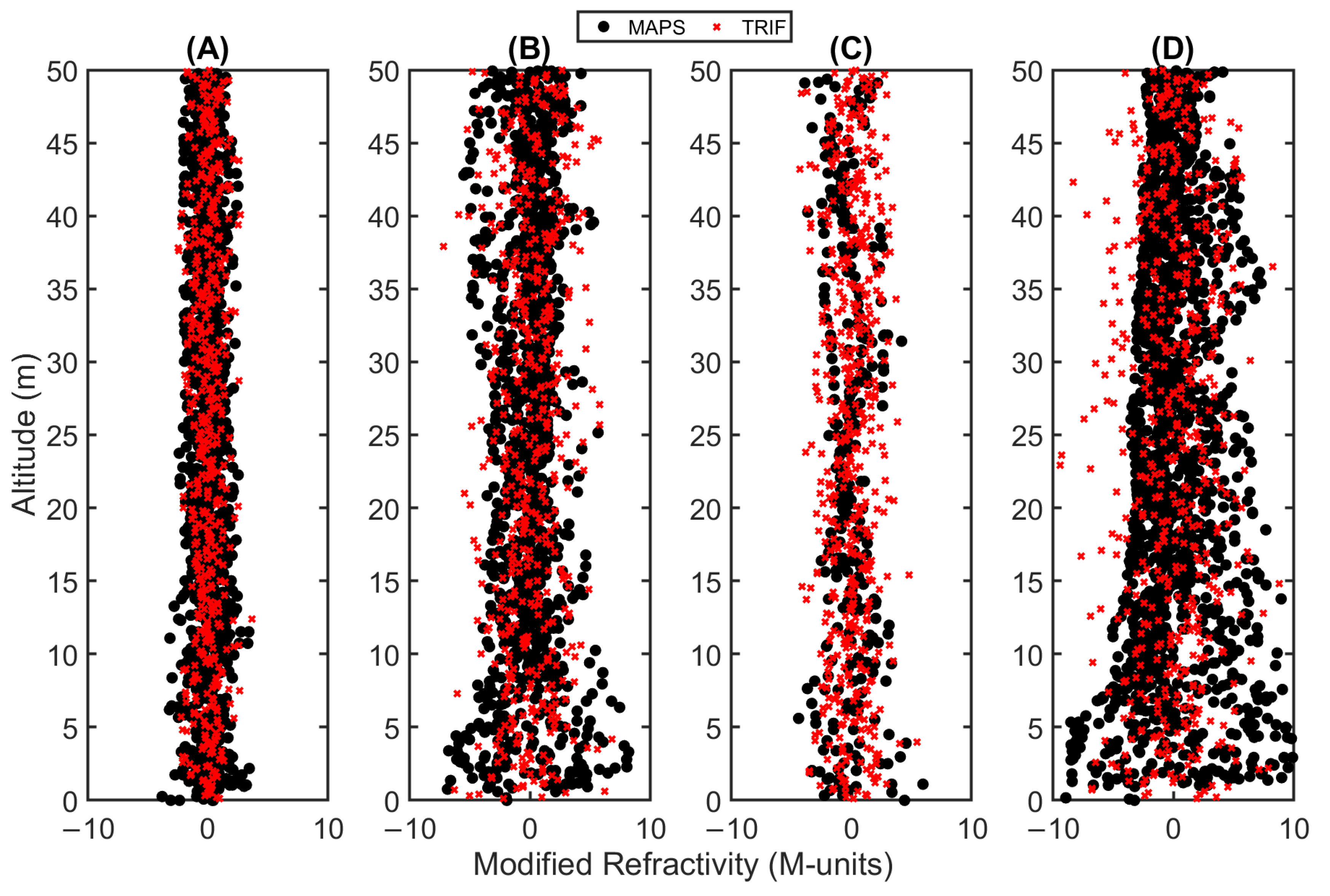
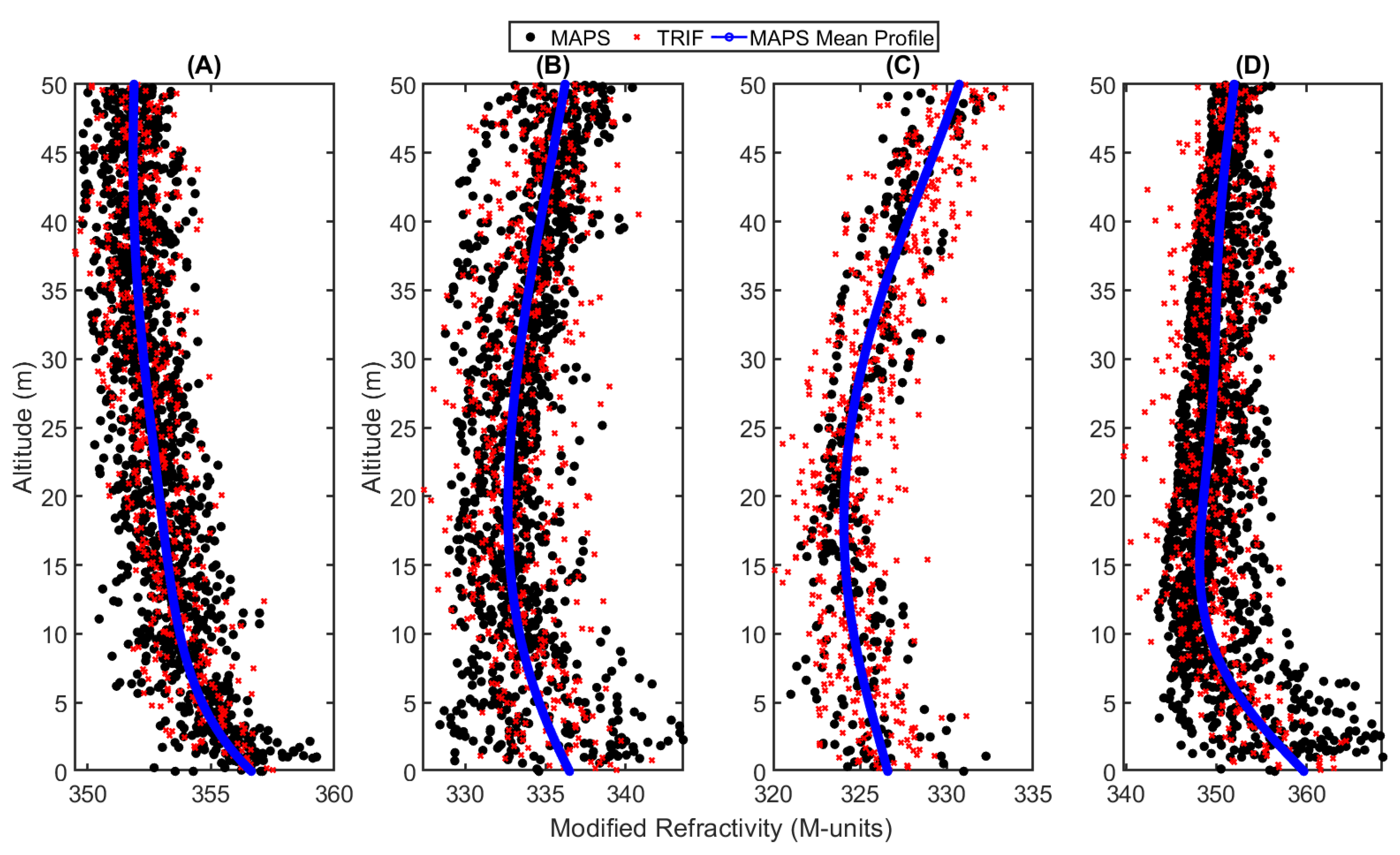
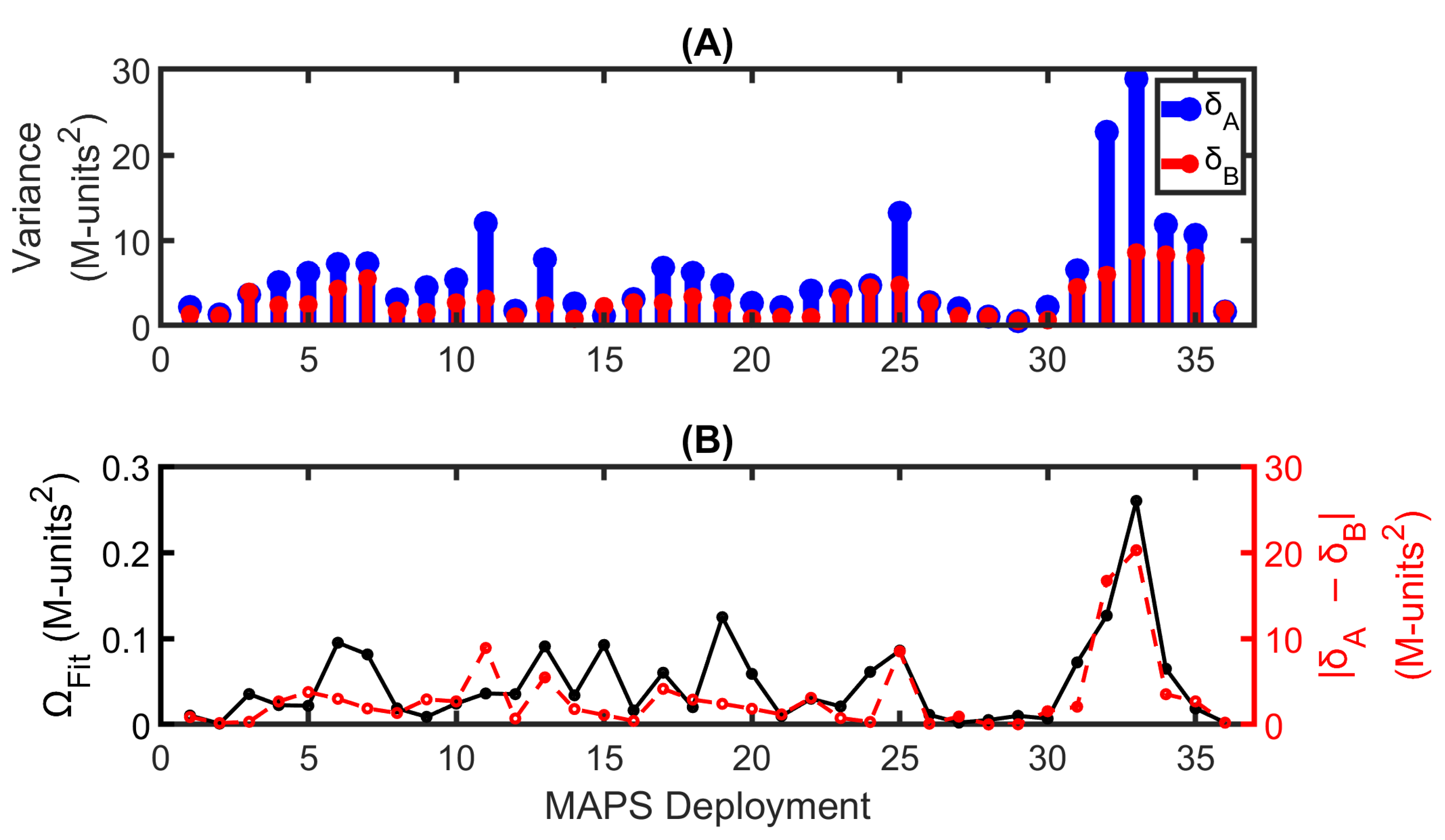
5.2. Refractive Fluctuations
6. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Businger, J.A.; Wyngaard, J.C.; Izumi, Y.; Bradley, E.F. Flux-profile relationships in the atmospheric surface layer. J. Atmos. Sci. 1971, 28, 181–189. [Google Scholar] [CrossRef]
- Dyer, A.J. A review of flux-profile relationships. Bound.-Layer Meteorol. 1974, 7, 363–372. [Google Scholar] [CrossRef]
- Webster, P.J.; Lukas, R. TOGA COARE: The coupled ocean–atmosphere response experiment. Bull. Am. Meteorol. Soc. 1992, 73, 1377–1416. [Google Scholar] [CrossRef]
- Fairall, C.W.; Bradley, E.F.; Rogers, D.P.; Edson, J.B.; Young, G.S. Bulk parameterization of air-sea fluxes for tropical ocean-global atmosphere coupled-ocean atmosphere response experiment. J. Geophys. Res. Ocean. 1996, 101, 3747–3764. [Google Scholar] [CrossRef] [Green Version]
- Fairall, C.W.; Bradley, E.F.; Hare, J.E.; Grachev, A.A.; Edson, J.B. Bulk parameterization of air–sea fluxes: Updates and verification for the COARE algorithm. J. Clim. 2003, 16, 571–591. [Google Scholar] [CrossRef]
- Frederickson, P. Navy Atmospheric Measurements for EM Propagation Modeling. Executive Summary, Calhoun.nps.edu. 2016. Available online: https://www.nps.edu/en/web/research/summaries (accessed on 27 April 2023).
- Hogan, T.; Liu, M.; Ridout, J.; Peng, M.; Whitcomb, T.; Ruston, B.; Reynolds, C.; Eckermann, S.; Moskaitis, J.; Baker, N.; et al. The navy global environmental model. Oceanography 2014, 27, 116–125. [Google Scholar] [CrossRef]
- Grachev, A.A.; Andreas, E.L.; Fairall, C.W.; Guest, P.S.; Persson, P.O.G. SHEBA flux–profile relationships in the stable atmospheric boundary layer. Bound.-Layer Meteorol. 2007, 124, 315–333. [Google Scholar] [CrossRef]
- Yang, Z.; Calderer, A.; He, S.; Sotiropoulos, F.; Doyle, J.D.; Flagg, D.D.; MacMahan, J.; Wang, Q.; Haus, B.K.; Graber, H.C.; et al. Numerical Study on the Effect of Air–Sea–Land Interaction on the Atmospheric Boundary Layer in Coastal Area. Atmosphere 2018, 9, 51. [Google Scholar] [CrossRef] [Green Version]
- Doreene, K.; Wang, Q. Optimized estimation of surface layer characteristics from profiling measurements. Atmosphere 2016, 7, 14. [Google Scholar]
- Wang, Q.; Alappattu, D.P.; Billingsley, S.; Blomquist, B.; Burkholder, R.J.; Christman, A.J.; Creegan, E.D.; De Paolo, T.; Eleuterio, D.P.; Fernando, H.J.S.; et al. CASPER: Coupled air–sea processes and electromagnetic ducting research. Bull. Am. Meteorol. Soc. 2018, 99, 1449–1471. [Google Scholar] [CrossRef]
- Wang, Q.; Franklin, K.; Yamaguchi, R.; Ortiz-Suslow, D.G.; Alappattu, D.P.; Yardim, C.; Burkholder, R. Ducting conditions during casper-west field campaign. In Proceedings of the 2018 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Boston, MA, USA, 8–13 July 2018; pp. 877–878. [Google Scholar]
- Rainer, R.B. In-Situ Observation of Undisturbed Surface Layer Scaler Profiles for Characterizing Evaporative Duct Properties; Naval Postgraduate School Monterey United States: Monterey, CA, USA, 2016. [Google Scholar]
- Alappattu, D.P.; Wang, Q.; Rainer, R.; Yamaguchi, R.; Lind, R.J. 4.4 Characteristics of surface layer scalar profiles using the in-situ measurements from an undisturbed marine environment. In Proceedings of the 20th Conference on Air–Sea Interaction, Madison, WI, USA, 15–19 August 2016; American Meteorological Society: Boston, UK, 2016. [Google Scholar]
- Ulate, M.; Wang, Q.; Haack, T.; Holt, T.; Alappattu, D.P. Mean offshore refractive conditions during the CASPER East field campaign. J. Appl. Meteorol. Climatol. 2019, 58, 853–874. [Google Scholar] [CrossRef]
- Pastore, D.M.; Greenway, D.P.; Stanek, M.J.; Wessinger, S.E.; Haack, T.; Wang, Q.; Hackett, E.E. Comparison of atmospheric refractivity estimation methods and their influence on radar propagation predictions. Radio Sci. 2021, 56, 1–17. [Google Scholar] [CrossRef]
- Pastore, D.M.; Wessinger, S.E.; Greenway, D.P.; Stanek, M.J.; Burkholder, R.J.; Haack, T.; Wang, Q.; Hackett, E.E. Refractivity inversions from point-to-point X-band radar propagation measurements. Radio Sci. 2022, 57, 1–16. [Google Scholar] [CrossRef]
- Rouseff, D. Simulated microwave propagation through tropospheric turbulence. IEEE Trans. Antennas Propag. 1992, 40, 1076–1083. [Google Scholar] [CrossRef]
- Ivanov, V.K.; VShalyapin, N.; Levadny, Y.V. Microwave scattering by tropospheric fluctuations in an evaporation duct. Radiophys. Quantum Electron. 2009, 52, 277–286. [Google Scholar] [CrossRef]
- Levadnyi, I.; Ivanov, V.; Shalyapin, V. Simulation of microwave propagation in turbulent evaporation duct. In Proceedings of the 2012 6th European Conference on Antennas and Propagation (EUCAP), Prague, Czech Republic, 26–30 March 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–3. [Google Scholar]
- Chou, Y.-H.; Kiang, J.-F. Effect of turbulence on wave propagation in evaporation ducts above a rough sea surface. In Forum for Electromagnetic Research Methods and Application Technologies; University of Limoges: Limoges, France, 2014; Volume 12. [Google Scholar]
- Wagner, M.; Gerstoft, P.; Rogers, T. Estimating refractivity from propagation loss in turbulent media. Radio Sci. 2016, 51, 1876–1894. [Google Scholar] [CrossRef] [Green Version]
- Bean, B.R.; Dutton, E.J. Radio Meteorology; Superintendentof Documents; U.S. Government Publishing Office: Washington, DC, USA, 1966; Volume 92.
- Buck, A.L. New equations for computing vapor pressure and enhancement factor. J. Appl. Meteorol. Climatol. 1981, 20, 1527–1532. [Google Scholar] [CrossRef]
- Ishimaru, A. Wave Propagation and Scattering in Random Media; Academic Press: New York, NY, USA, 1978; Volume 2. [Google Scholar]
- Emes, M.J.; Arjomandi, M.; Kelso, R.M.; Ghanadi, F. Turbulence length scales in a low-roughness near-neutral atmospheric surface layer. J. Turbul. 2019, 20, 545–562. [Google Scholar] [CrossRef]
- Percival, D.B. Simulating Gaussian random processes with specified spectra. Comput. Sci. Stat. 1993, 24, 534. [Google Scholar]
- Frederickson, P.A.; Davidson, K.L.; Zeisse, C.R.; Bendall, C.S. Estimating the refractive index structure parameter () over the ocean using bulk methods. J. Appl. Meteorol. 2000, 39, 1770–1783. [Google Scholar] [CrossRef]
- Frederickson, P.A.; Hammel, S.; Tsintikidis, D. Improving bulk Cn2 models for over-ocean applications through new determinations of the dimensionless temperature structure parameter. In Atmospheric Optics: Models, Measurements, and Target-in-the-Loop Propagation; SPIE: Bellingham, WA, USA, 2007; Volume 6708, pp. 45–54. [Google Scholar]
- Qing, C.; Wu, X.; Li, X.; Tian, Q.; Liu, D.; Rao, R.; Zhu, W. Simulating the refractive index structure constant in the surface layer at Antarctica with a mesoscale model. Astron. J. 2017, 155, 37. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; IEEE: Piscataway, NJ, USA, 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- Tatarskii, V.I. The Effects of the Turbulent Atmosphere on Wave Propagation; Israel Program for Scientific Translations: Jerusalem, Israel, 1971. [Google Scholar]
- Wheelon, A.D. Electromagnetic Scintillation: Volume 1, Geometrical Optics; Cambridge University Press: Cambridge, UK, 2001. [Google Scholar]
- VanZandt, T.E.; Green, J.L.; Gage, K.S.; Clark, W.L. Vertical profiles of refractivity turbulence structure constant: Comparison of observations by the Sunset radar with a new theoretical model. Radio Sci. 1978, 13, 819–829. [Google Scholar] [CrossRef]
- Panofsky, H.A. Atmospheric turbulence. In Models and Methods for Engineering Applications; Wiley: New York, NY, USA, 1984; Volume 397. [Google Scholar]
- Geernaert, G.L. Surface layer. In Encyclopedia of Atmospheric Sciences; Elsevier: Amsterdam, The Netherlands, 2003; pp. 305–311. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MAPS Dataset | Deployment Time (EST) | Duration (min.) | Launches | Samples | M′ RMS (M-Units) | NAVSLaM (m−2/3) | Derived Lz (m) | ΩFIT (M-Units2) |
|---|---|---|---|---|---|---|---|---|
| 1 | 13-Oct 12:49 | 22 | 7 | 1572 | 1.092 | 4.75 × 10−13 | 4.69 | 0.010 |
| 2 | 13-Oct 15:47 | 25 | 7 | 1264 | 1.021 | 4.96 × 10−13 | 4.24 | 0.001 |
| 3 | 14-Oct 09:06 | 19 | 5 | 698 | 1.471 | 4.66 × 10−13 | 5.89 | 0.035 |
| 4 | 14-Oct 12:42 | 38 | 7 | 867 | 1.742 | 3.22 × 10−13 | 8.09 | 0.022 |
| 5 | 14-Oct 15:32 | 17 | 6 | 684 | 1.442 | 8.34 × 10−13 | 4.51 | 0.022 |
| 6 | 15-Oct 08:22 | 9 | 7 | 936 | 1.799 | 1.35 × 10−12 | 4.58 | 0.095 |
| 7 | 15-Oct 11:03 | 54 | 6 | 981 | 1.835 | 1.17 × 10−12 | 4.74 | 0.081 |
| 8 | 15-Oct 14:41 | 30 | 6 | 737 | 1.350 | 1.01 × 10−12 | 4.08 | 0.019 |
| 9 | 16-Oct 09:12 | 44 | 2 | 364 | 1.580 | 1.73 × 10−12 | 3.81 | 0.009 |
| 10 | 16-Oct 12:16 | 20 | 6 | 1077 | 1.664 | 1.79 × 10−12 | 3.70 | 0.024 |
| 11 | 16-Oct 14:38 | 32 | 7 | 1134 | 2.186 | 1.27 × 10−12 | 5.51 | 0.036 |
| 12 | 17-Oct 08:07 | 22 | 9 | 945 | 1.216 | 1.48 × 10−12 | 3.19 | 0.035 |
| 13 | 17-Oct 11:04 | 14 | 7 | 1250 | 1.837 | 1.09 × 10−12 | 5.01 | 0.091 |
| 14 | 17-Oct 14:06 | 16 | 7 | 873 | 1.481 | 1.23 × 10−12 | 3.91 | 0.034 |
| 15 | 17-Oct 18:25 | 35 | 3 | 295 | 1.164 | 9.47 × 10−13 | 3.58 | 0.092 |
| 16 | 20-Oct 09:41 | 32 | 20 | 2643 | 1.427 | 7.06 × 10−13 | 4.93 | 0.016 |
| 17 | 20-Oct 12:57 | 23 | 10 | 1585 | 1.968 | 7.56 × 10−13 | 5.87 | 0.060 |
| 18 | 20-Oct 15:29 | 45 | 15 | 2287 | 1.749 | 6.74 × 10−13 | 5.70 | 0.020 |
| 19 | 21-Oct 07:01 | 41 | 7 | 969 | 1.605 | 1.95 × 10−13 | 9.42 | 0.125 |
| 20 | 21-Oct 08:57 | 34 | 8 | 859 | 1.116 | 2.20 × 10−13 | 6.42 | 0.059 |
| 21 | 21-Oct 10:29 | 17 | 7 | 619 | 1.094 | 5.30 × 10−13 | 4.73 | 0.010 |
| 22 | 21-Oct 12:10 | 42 | 7 | 695 | 1.252 | 3.09 × 10−13 | 5.85 | 0.030 |
| 23 | 23-Oct 08:43 | 22 | 14 | 1837 | 1.991 | 1.67 × 10−13 | 11.80 | 0.021 |
| 24 | 23-Oct 11:44 | 18 | 9 | 1457 | 2.253 | 1.66 × 10−13 | 13.57 | 0.061 |
| 25 | 24-Oct 08:05 | 31 | 6 | 920 | 2.290 | 1.81 × 10−12 | 4.85 | 0.086 |
| 26 | 25-Oct 11:25 | 30 | 16 | 2072 | 1.870 | 4.43 × 10−13 | 7.59 | 0.011 |
| 27 | 25-Oct 14:11 | 25 | 14 | 1892 | 1.190 | 2.98 × 10−14 | 17.02 | 0.002 |
| 28 | 25-Oct 15:58 | 24 | 8 | 1187 | 0.955 | 3.44 × 10−13 | 4.68 | 0.005 |
| 29 | 25-Oct 18:28 | 37 | 6 | 748 | 0.749 | 3.99 × 10−13 | 3.98 | 0.010 |
| 30 | 31-Oct 17:19 | 25 | 8 | 799 | 0.958 | 9.96 × 10−13 | 2.96 | 0.007 |
| 31 | 31-Oct 18:15 | 30 | 7 | 850 | 1.838 | 1.09 × 10−12 | 4.85 | 0.072 |
| 32 | 01-Oct 08:31 | 21 | 10 | 1533 | 2.770 | 1.98 × 10−12 | 5.38 | 0.127 |
| 33 | 01-Oct 10:57 | 19 | 10 | 1570 | 3.076 | 1.36 × 10−12 | 7.07 | 0.260 |
| 34 | 01-Oct 13:30 | 28 | 8 | 1306 | 2.601 | 2.52 × 10−12 | 4.75 | 0.065 |
| 35 | 01-Oct 15:39 | 19 | 7 | 1226 | 2.390 | 2.16 × 10−12 | 4.78 | 0.019 |
| 36 | 01-Oct 17:32 | 11 | 12 | 967 | 1.183 | 1.64 × 10−12 | 3.02 | 0.002 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pastore, D.M.; Yamaguchi, R.T.; Wang, Q.; Hackett, E.E. On the Variability of In Situ Surface Layer Refractivity Measurements. Atmosphere 2023, 14, 1085. https://doi.org/10.3390/atmos14071085
Pastore DM, Yamaguchi RT, Wang Q, Hackett EE. On the Variability of In Situ Surface Layer Refractivity Measurements. Atmosphere. 2023; 14(7):1085. https://doi.org/10.3390/atmos14071085
Chicago/Turabian StylePastore, Douglas M., Ryan T. Yamaguchi, Qing Wang, and Erin E. Hackett. 2023. "On the Variability of In Situ Surface Layer Refractivity Measurements" Atmosphere 14, no. 7: 1085. https://doi.org/10.3390/atmos14071085