
Observations of Atmospheric Aerosol and Cloud Using a Polarized Micropulse Lidar in Xi’an, China

 , ,
, ,
Abstract
:1. Introduction
2. Observation Campaign and Instruments
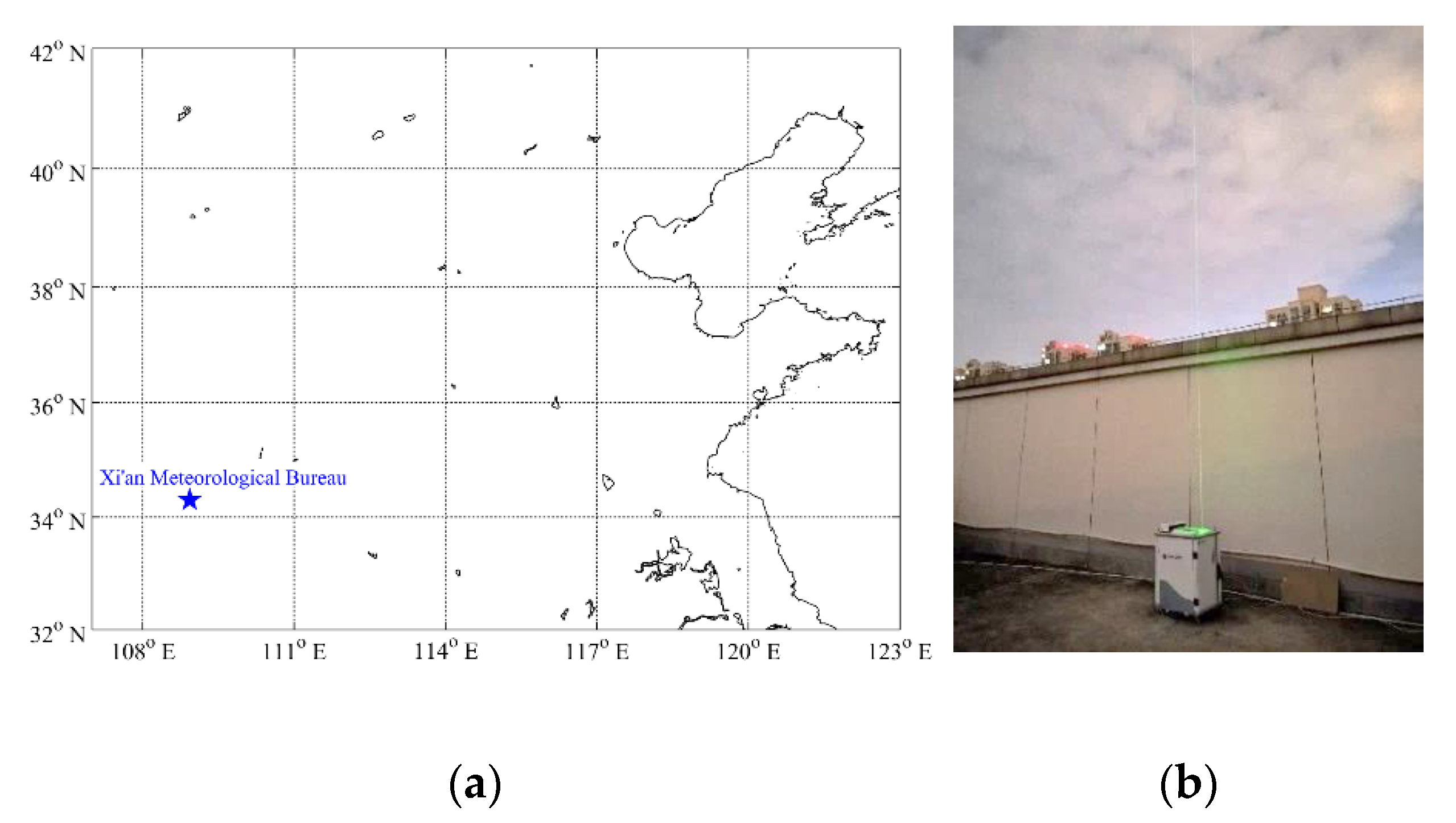
2.1. Observation Campaign in Xi’an
2.2. The P-MPL Setup
2.3. GTS1 Digital Radiosonde
2.4. Ambient Air Quality Monitor
3. Detection Principle and Data Processing Methods of the P-MPL
3.1. The Lidar Equation
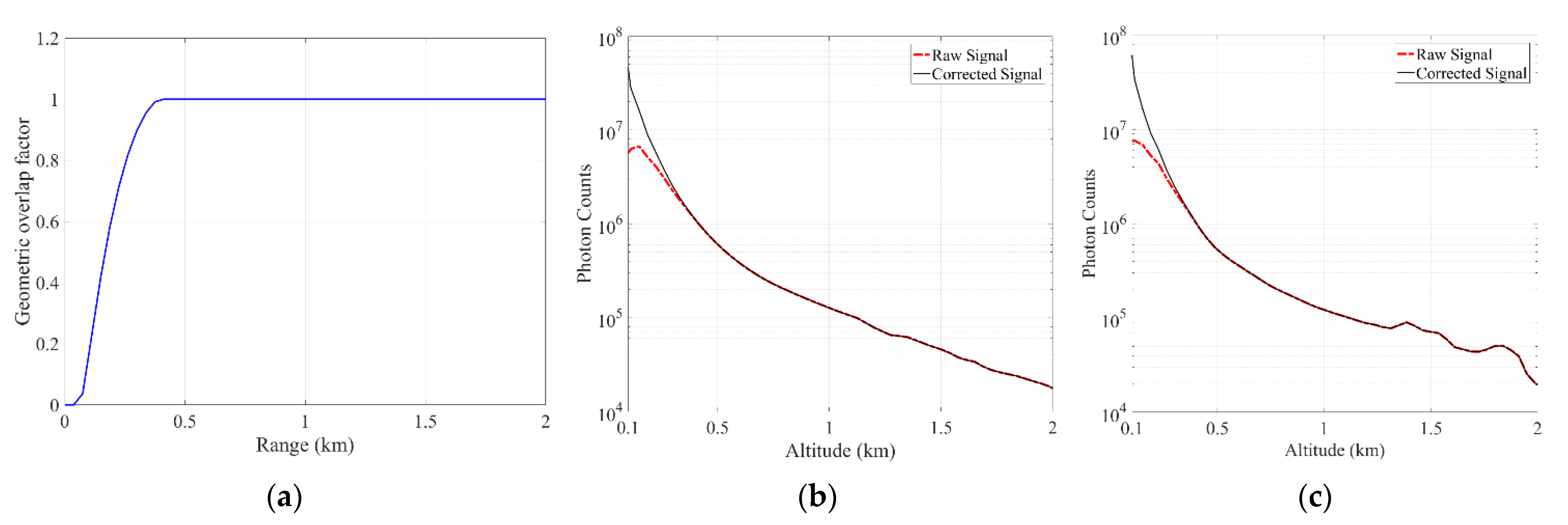
3.2. Geometric Overlap Factor Calculation Method
3.3. Calculation of DR
3.4. ABL Depth Determination
4. Results and Discussion
4.1. Observation of Aerosols and Clouds during a Short Rainfall Process
4.2. Observation of Tropospheric Cirrus Clouds
4.3. Observation of a Haze Process
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, X.; Vu, T.V.; Shi, Z.; Harrison, R.M.; Liu, D.; Cen, K. Characterization and Source Apportionment of Carbonaceous PM2.5 Particles in China—A Review. Atmos. Environ. 2018, 189, 187–212. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Y.; Yu, C.; Yi, F. Evolution of Aerosols in the Atmospheric Boundary Layer and Elevated Layers during a Severe, Persistent Haze Episode in a Central China Megacity. Atmosphere 2021, 12, 152. [Google Scholar] [CrossRef]
- Leonardi, A.; Ricker, H.M.; Gale, A.G.; Ball, B.T.; Odbadrakh, T.T.; Shields, G.C.; Navea, J.G. Particle Formation and Surface Processes on Atmospheric Aerosols: A Review of Applied Quantum Chemical Calculations. Int. J. Quantum Chem. 2020, 120, e26350. [Google Scholar] [CrossRef]
- Kim, D.; Ramanathan, V. Solar Radiation Budget and Radiative Forcing due to Aerosols and Clouds. J. Geophys. Res. Atoms. 2008, 113, D02203. [Google Scholar] [CrossRef] [Green Version]
- Solomos, S.; Bougiatioti, A.; Soupiona, O.; Papayannis, A.; Mylonaki, M.; Papanikolaou, C.; Argyrouli, A.; Nenes, A. Effects of Regional and Local Atmospheric Dynamics on the Aerosol and CCN Load Over Athens. Atmos. Environ. 2019, 197, 53–65. [Google Scholar] [CrossRef]
- Wu, B.; Qin, L.; Wang, M.; Zhou, T.; Dong, Y.; Chai, T. The Composition of Microbial Aerosols, PM2.5, and PM10 in a Duck House in Shandong Province, China. Poult. Sci. 2019, 98, 5913–5924. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, Y.; Wang, T.; Qian, Y. Rapid Improvement in Air Quality due to Aerosol-pollution Control during 2012–2018: An Evidence Observed in Kunshan in the Yangtze River Delta, China. Atmos. Pollut. Res. 2020, 11, 693–701. [Google Scholar] [CrossRef]
- Jin, Q.; Fang, X.; Wen, B.; Shan, A. Spatio-temporal Variations of PM2.5 Emission in China from 2005 to 2014. Chemosphere 2017, 183, 429–436. [Google Scholar] [CrossRef]
- Salam, A.; Mamoon, H.A.; Ullah, M.B.; Ullah, S.M. Measurement of the Atmospheric Aerosol Particle Size Distribution in a Highly Polluted Mega-city in Southeast Asia (Dhaka-Bangladesh). Atmos. Environ. 2012, 59, 338–343. [Google Scholar] [CrossRef]
- Rader, F.; Traversi, R.; Severi, M.; Becagli, S.; Müller, K.-J.; Nakoudi, K.; Ritter, C. Overview of Aerosol Properties in the European Arctic in Spring 2019 Based on In Situ Measurements and Lidar Data. Atmosphere 2021, 12, 271. [Google Scholar] [CrossRef]
- Liu, D.; Yang, Y.; Cheng, Z.; Huang, H.; Zhang, B.; Ling, T.; Shen, Y. Retrieval and Analysis of a Polarized High-spectral-resolution Lidar for Profiling Aerosol Optical Properties. Opt. Express 2013, 21, 13084–13093. [Google Scholar] [CrossRef]
- Yorks, J.E.; Selmer, P.A.; Kupchock, A.; Nowottnick, E.P.; Christian, K.E.; Rusinek, D.; Dacic, N.; McGill, M.J. Aerosol and Cloud Detection Using Machine Learning Algorithms and Space-Based Lidar Data. Atmosphere 2021, 12, 606. [Google Scholar] [CrossRef]
- Wang, Z.; Mao, J.; Li, J.; Zhao, H.; Zhou, C.; Sheng, H. Six-channel Multi-wavelength Polarization Raman Lidar for Aerosol and Water Vapor Profiling. Appl. Opt. 2017, 56, 5620–5629. [Google Scholar] [CrossRef] [PubMed]
- Schotland, R.M.; Sassen, K.; Stone, R. Observations by Lidar of Linear Depolarization Ratios for Hydrometeors. J. Appl. Meteorol. 1971, 10, 1011–1017. [Google Scholar] [CrossRef] [Green Version]
- Winker, D.M.; Vaughan, M.; Omar, A.; Hu, Y.; Powell, K.A.; Liu, Z.; Hunt, W.H.; Young, S.A. Overview of the CALIPSO Mission and CALIOP Data Processing Algorithms. J. Atmos. Ocean. Tech. 2009, 26, 2310–2323. [Google Scholar] [CrossRef]
- Pisani, G.; Boselli, A.; Coltelli, M.; Leto, G.; Pica, G.; Scollo, S.; Spinelli, N.; Wang, X. Lidar Depolarization Measurement of Fresh Volcanic Ash from Mt. Etna, Italy. Atmos. Environ. 2012, 62, 34–40. [Google Scholar] [CrossRef]
- Wang, L.; Stanič, S.; Eichinger, W.E.; Močnik, G.; Drinovec, L.; Gregorič, A. Investigation of Aerosol Properties and Structures in Two Representative Meteorological Situations over the Vipava Valley Using Polarization Raman LiDAR. Atmosphere 2019, 10, 128. [Google Scholar] [CrossRef] [Green Version]
- Xian, J.; Sun, D.; Xu, W.; Tian, C.; Tan, Q.; Han, Y.; Yang, S. Calibration and Calculation of Polarization Lidar. Earth Space Sci. 2019, 6, 1161–1170. [Google Scholar] [CrossRef] [Green Version]
- Fernald, F.G. Analysis of Atmospheric Lidar Observations: Some Comments. Appl. Opt. 1984, 23, 652. [Google Scholar] [CrossRef]
- Wang, N.; Shen, X.; Xiao, D.; Veselovskii, I.; Zhao, C.; Chen, F.; Liu, C.; Rong, Y.; Ke, J.; Wang, B.; et al. Development of ZJU High-spectral-resolution Lidar for Aerosol and Cloud: Feature Detection and Classification. J. Quant. Spectrosc. Radiat. Transf. 2021, 261, 07513. [Google Scholar] [CrossRef]
- Smith, J.A.; Chu, X. High-efficiency Receiver Architecture for Resonance-Fluorescence and Doppler Lidars. Appl. Opt. 2015, 54, 3173–3184. [Google Scholar] [CrossRef] [Green Version]
- Haarig, M.; Ansmann, A.; Baars, H.; Jimenez, C.; Veselovskii, I.; Engelmann, R.; Althausen, D. Depolarization and Lidar Ratios at 355, 532, and 1064 nm and Microphysical Properties of Aged Tropospheric and Stratospheric Canadian Wildfire Smoke. Atmos. Chem. Phys. 2018, 18, 11847–11861. [Google Scholar] [CrossRef] [Green Version]
- Liu, L.; Mishchenko, M.I. Spectrally Dependent Linear Depolarization and Lidar Ratios for Nonspherical Smoke Aerosols. J. Quant. Spectrosc. Radiat. Transf. 2020, 248, 106953. [Google Scholar] [CrossRef]
- Wang, L.; Stanič, S.; Eichinger, W.; Song, X.; Zavrtanik, M. Development of an Automatic Polarization Raman Lidar for Aerosol Monitoring over Complex Terrain. Sensors (Basel) 2019, 19, 3186. [Google Scholar] [CrossRef] [Green Version]
- Chen, W.; Chiang, C.; Nee, J. Lidar Ratio and Depolarization Ratio for Cirrus Clouds. Appl. Opt. 2002, 41, 6470–6746. [Google Scholar] [CrossRef] [PubMed]
- Delanoë, J.; Hogan, R.J. Combined CloudSat-CALIPSO-MODIS Retrievals of the Properties of Ice Clouds. J. Geophys. Res. Atoms. 2010, 115, D00H29. [Google Scholar] [CrossRef] [Green Version]
- Wu, S.; Song, X.; Liu, B.; Dai, G.; Liu, J.; Zhang, K.; Qin, S.; Hua, D.; Gao, F.; Liu, L. Mobile Multi-wavelength Polarization Raman Lidar for Water Vapor, Cloud and Aerosol Measurement. Opt. Express 2015, 23, 33870–33892. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alvarez, J.M.; Vaughan, M.A.; Hostetler, C.A.; Hung, W.H.; Winker, D.M. Calibration Technique for Polarization-Sensitive Lidars. J. Atmos. Ocean. Tech. 2006, 23, 683–699. [Google Scholar] [CrossRef]
- Wang, H.; Li, Z.; Lv, Y.; Xu, H.; Li, K.; Li, D.; Hou, W.; Zheng, F.; Wei, Y.; Ge, B. Observational Study of Aerosol-induced Impact on Planetary Boundary Layer Based on Lidar and Sunphotometer in Beijing. Environ. Pollut. 2019, 252, 897–906. [Google Scholar] [CrossRef]
- Miao, Y.; Liu, S.; Guo, J.; Huang, S.; Yan, Y.; Lou, M. Unraveling the Relationships between Boundary Layer Height and PM2.5 Pollution in China Based on Four-year Radiosonde Measurements. Environ. Pollut. 2018, 243, 1186–1195. [Google Scholar] [CrossRef]
- He, Q.; Mao, J.; Chen, J.; Hu, Y. Observational and Modeling Studies of Urban Atmospheric Boundary-layer Height and Its Evolution Mechanisms. Atmos. Environ. 2006, 40, 1064–1077. [Google Scholar] [CrossRef]
- Yang, T.; Wang, Z.; Zhang, W.; Gbaguidi, A.; Nobuo, S.; Wang, X.; Matsui, I.; Sun, Y. Technical note: Boundary Layer Height Determination from Lidar for Improving Air Pollution Episode Modeling: Development of New Algorithm and Evaluation. Atmos. Chem. Phys. 2017, 17, 6215–6225. [Google Scholar] [CrossRef] [Green Version]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Specification |
|---|---|
| Transmitter | |
| Type | Diode-pumped solid state |
| Laser wavelength | 532 nm |
| Pulse energy | 60 µJ |
| Pulse duration | 5 ns |
| Pulse repetition frequency | 7 kHz |
| Beam divergence | 200 µrad |
| Receiver | |
| Telescope type | Schmidt–Cassegrain |
| Telescope diameter | 8-inch |
| Field of view | 500 µrad |
| Filter bandwidth | 0.5 nm |
| Detector type | PMT |
| Detection mode | Photon counting |
| Range resolution | 37.5 m |
| Detection range | 0.1~20 km |
| Parameters | Specification |
|---|---|
| Temperature | −90 °C~50 °C |
| Relative humidity | 0%~100% |
| Pressure | 5 hPa~1060 hPa |
| Maximum detection altitude | 36 km |
| Parameters | Specification |
|---|---|
| Measuring range | 0~1000 µg/m3 |
| Minimum detection value | ≤5 µg/m3 |
| Minimum display unit | 0.1 µg/m3 |
| Sampling flow deviation | 16.7 L/min ± 3% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Song, X.; Wang, Z.; Wang, W.; Wang, X.; Zhuang, Q.; Liu, X.; Li, H.; Ma, K.; Li, X.; et al. Observations of Atmospheric Aerosol and Cloud Using a Polarized Micropulse Lidar in Xi’an, China. Atmosphere 2021, 12, 796. https://doi.org/10.3390/atmos12060796
Chen C, Song X, Wang Z, Wang W, Wang X, Zhuang Q, Liu X, Li H, Ma K, Li X, et al. Observations of Atmospheric Aerosol and Cloud Using a Polarized Micropulse Lidar in Xi’an, China. Atmosphere. 2021; 12(6):796. https://doi.org/10.3390/atmos12060796
Chicago/Turabian StyleChen, Chao, Xiaoquan Song, Zhangjun Wang, Wenyan Wang, Xiufen Wang, Quanfeng Zhuang, Xiaoyan Liu, Hui Li, Kuntai Ma, Xianxin Li, and et al. 2021. "Observations of Atmospheric Aerosol and Cloud Using a Polarized Micropulse Lidar in Xi’an, China" Atmosphere 12, no. 6: 796. https://doi.org/10.3390/atmos12060796