Impact of Lidar Data Assimilation on Low-Level Wind Shear Simulation at Lanzhou Zhongchuan International Airport, China: A Case Study

 and
and
Abstract
:1. Introduction
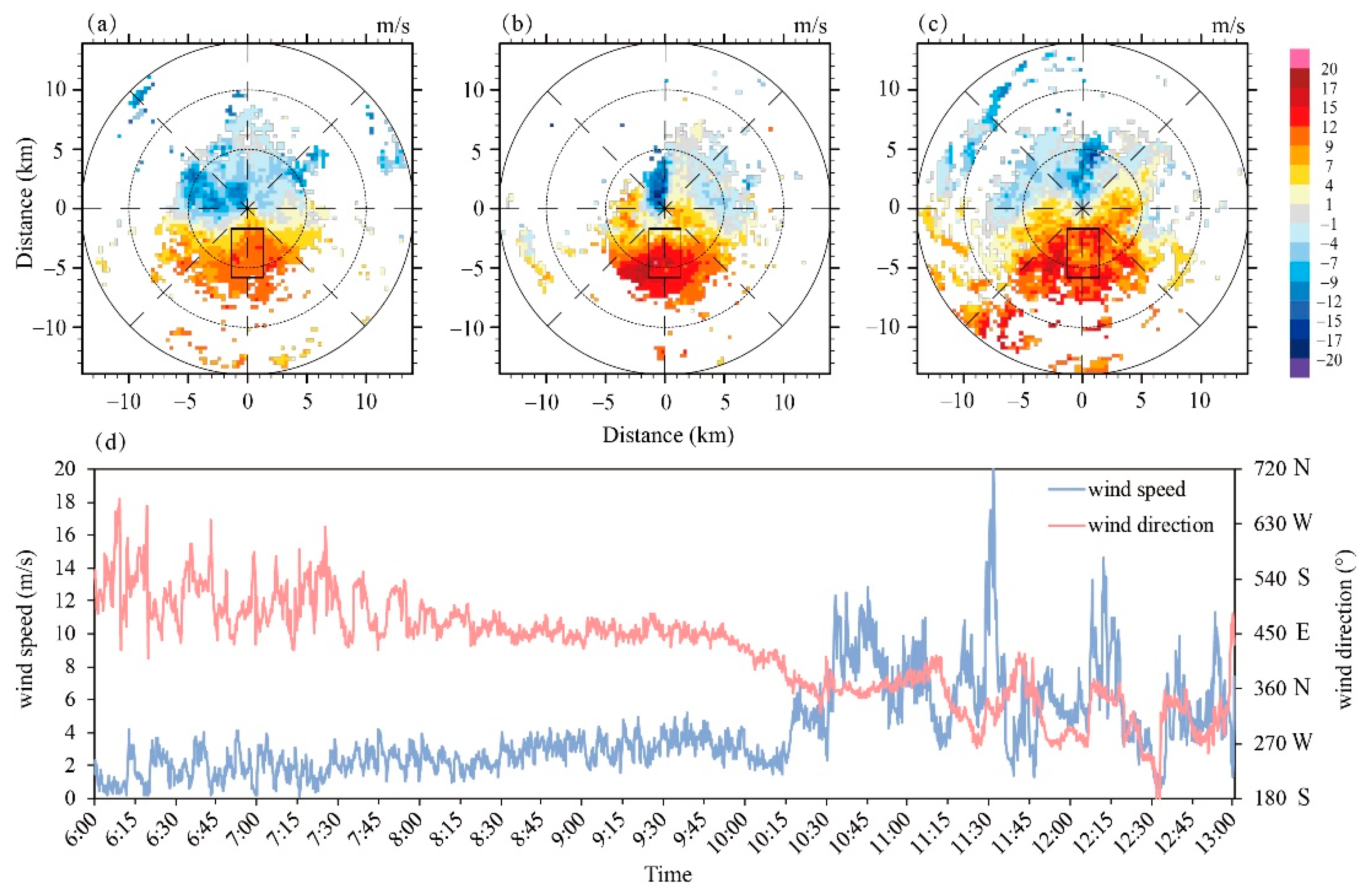
2. Overview of LLW Case
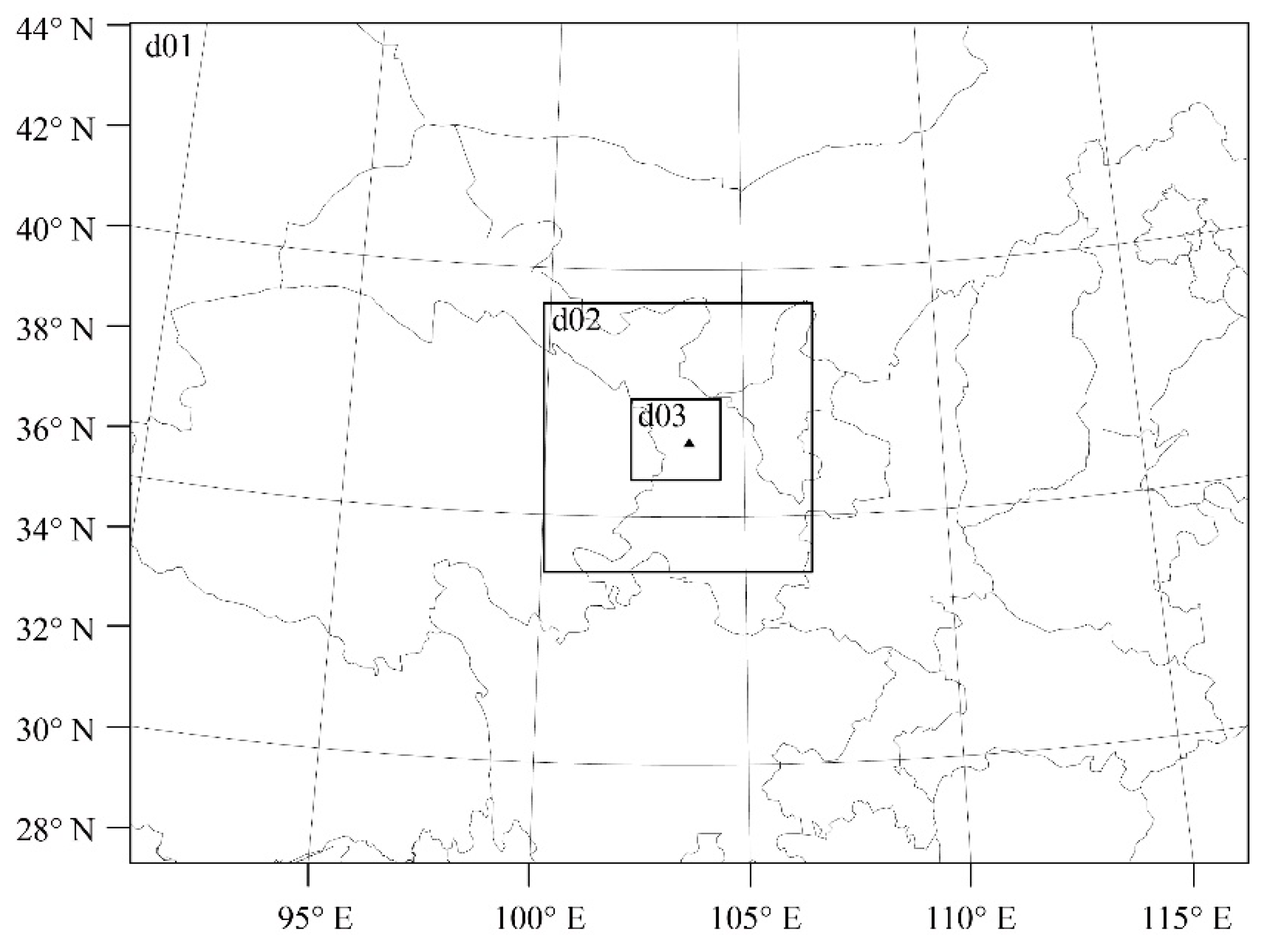
3. Experimental Design
4. Results
4.1. Increment Analysis
4.2. Comparison with Lidar Observations
4.3. Comparison with AWOS Observation
4.4. Model-Based Analysis
5. Conclusions
- Experiments without DA have no ability to capture the small-scale features of LLW at ZLLL. The lidar DA can effectively absorb lidar observations, and consequently improve the simulation ability of the WRF model on LLW;
- Assimilation experiments with a small interval (e.g., 10 min) are beneficial for the simulation of LLW, whereas experiments with a large interval are unfavorable for maintaining the development of the wind field. Moreover, a higher vertical resolution (L60) may not provide much improvement in simulating LLW at ZLLL;
- The simulation results indicate that this LLW case occurred at a small temporal and spatial scale, accompanied by a large wind speed gradient in the southern area of ZLLL. A small change in the initial field may result in different simulation results;
- The accurate simulation of LLW is helpful for improving aviation safety. Since LLW can occur in various weather conditions, more LLW case studies and experiments should be conducted in the future for the application of lidar DA in LLW simulation and prediction.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- International Civil Aviation Organization (ICAO). Meteorological Service for International Air Navigation: Annex 3 to the Convention on International Civil Aviation, 16th ed.; ICAO: Montréal, QC, Canada, 2007; p. 187. [Google Scholar]
- Nechaj, P.; Gaál, L.; Bartok, J.; Vorobyeva, O.; Gera, M.; Kelemen, M.; Polishchuk, V. Monitoring of Low-Level Wind Shear by Ground-based 3D Lidar for Increased Flight Safety, Protection of Human Lives and Health. Int. J. Environ. Res. Public Health 2019, 16, 4584. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hon, K.-K. Predicting Low-Level Wind Shear Using 200-m-Resolution NWP at the Hong Kong International Airport. J. Appl. Meteorol. Clim. 2020, 59, 193–206. [Google Scholar] [CrossRef]
- Fujita, T.T.; Caracena, F. An Analysis of Three Weather-Related Aircraft Accidents. Bull. Am. Meteorol. Soc. 1977, 58, 1164–1181. [Google Scholar] [CrossRef]
- International Civil Aviation Organization (ICAO). Manual on Low-Level Wind Shear and Turbulence; ICAO: Montréal, QC, Canada, 2005; p. 222. [Google Scholar]
- Benjamin, S.G.; Brown, J.M.; Brunet, G.; Lynch, P.; Saito, K.; Schlatter, T.W. 100 Years of Progress in Forecasting and NWP Applications. Meteorol. Monogr. 2019, 59, 13.1–13.67. [Google Scholar] [CrossRef]
- Clark, T.L.; Keller, T.; Coen, J.; Neilley, P.; Hsu, H.-M.; Hall, W.D. Terrain-Induced Turbulence over Lantau Island: 7 June 1994 Tropical Storm Russ Case Study. J. Atmos. Sci. 1997, 54, 1795–1814. [Google Scholar] [CrossRef] [Green Version]
- Cheung, J.O.P.; Chan, P.W.; Leung, D.Y.C. Large-eddy simulation of the wind flow across a terminal building on the airfield. Int. J. Earth Sci. Eng. 2011, 4, 486–489. [Google Scholar]
- Li, L.; Chan, P.W.; Zhang, L.; Hu, F. Numerical Simulation of a Lee Wave Case over Three-Dimensional Mountainous Terrain under Strong Wind Condition. Adv. Meteorol. 2013, 2013, 1–13. [Google Scholar] [CrossRef]
- Carruthers, D.; Ellis, A.; Hunt, J.; Chan, P.W. Modelling of wind shear downwind of mountain ridges at Hong Kong International Airport. Meteorol. Appl. 2014, 21, 94–104. [Google Scholar] [CrossRef] [Green Version]
- Boilley, A.; Mahfouf, J.-F. Wind shear over the Nice Côte d’Azur airport: Case studies. Nat. Hazards Earth Syst. Sci. 2013, 13, 2223–2238. [Google Scholar] [CrossRef] [Green Version]
- Jiang, L.H.; Qin, Y.T.; Yang, Y.Y.; Wang, Z. Microscale Numerical Simulation about Field Wind and Wind Shear with the Aviation Numerical Weather Prediction Model. Sci. Tech. Eng. 2016, 16, 156–161. (In Chinese) [Google Scholar] [CrossRef]
- Chan, P.W.; Hon, K.K. Performance of super high resolution numerical weather prediction model in forecasting terrain-disrupted airflow at the Hong Kong International Airport: Case studies. Meteorol. Appl. 2016, 23, 101–114. [Google Scholar] [CrossRef]
- Shun, C.M.; Chan, P.W. Applications of an Infrared Doppler Lidar in Detection of Wind Shear. J. Atmos. Ocean. Technol. 2008, 25, 637–655. [Google Scholar] [CrossRef]
- Li, L.; Shao, A.; Zhang, K.; Ding, N.; Chan, P.-W. Low-Level Wind Shear Characteristics and Lidar-Based Alerting at Lanzhou Zhongchuan International Airport, China. J. Meteorol. Res. 2020, 34, 633–645. [Google Scholar] [CrossRef]
- Keohan, C.F.; Barr, K.; Hannon, S.M. Evaluation of Pulsed Lidar Wind Hazard Detection at Las Vegas International Airport. In Proceedings of the 12th Conference on Aviation, Range, and Aerospace Meteorology, Atlanta, GA, USA, 29 January–2 February 2006. [Google Scholar]
- Matayoshi, N.; Iijima, T.; Yamamoto, K.; Fujita, E. Development of Airport Low-level Wind Information (ALWIN). In Proceedings of the 16th AIAA Aviation Technology, Integration, and Operations Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar]
- Chen, Y.; An, J.; Wang, X.; Sun, Y.; Wang, Z.; Duan, J. Observation of wind shear during evening transition and an estimation of submicron aerosol concentrations in Beijing using a Doppler wind lidar. J. Meteorol. Res. 2017, 31, 350–362. [Google Scholar] [CrossRef]
- Zhang, H.; Wu, S.; Wang, Q.; Liu, B.; Yin, B.; Zhai, X. Airport low-level wind shear lidar observation at Beijing Capital International Airport. Infrared Phys. Technol. 2019, 96, 113–122. [Google Scholar] [CrossRef] [Green Version]
- Thobois, L.; Cariou, J.P.; Gultepe, I. Review of Lidar-Based Applications for Aviation Weather. Pure Appl. Geophys. 2019, 176, 1959–1976. [Google Scholar] [CrossRef]
- Choy, B.L.; Lee, O.S.M.; Shun, C.M.; Cheng, C.M. Prototype Automatic LIDAR- Based Wind Shear Detection Algorithms. In Proceedings of the 11th Conference on Aviation, Range, and Aerospace Meteorology, Hyannis, MA, USA, 3–8 October 2004. [Google Scholar]
- Tang, W.; Chan, P.W.; Haller, G. Lagrangian Coherent Structure Analysis of Terminal Winds Detected by Lidar. Part I: Turbulence Structures. J. Appl. Meteorol. Clim. 2011, 50, 325–338. [Google Scholar] [CrossRef] [Green Version]
- Kawabata, T.; Iwai, H.; Seko, H.; Shoji, Y.; Saito, K.; Ishii, S.; Mizutani, K. Cloud-Resolving 4D-Var Assimilation of Doppler Wind Lidar Data on a Meso-Gamma-Scale Convective System. Mon. Weather Rev. 2014, 142, 4484–4498. [Google Scholar] [CrossRef]
- Mlawer, E.J.; Taubman, S.J.; Brown, P.D.; Iacono, M.J.; Clough, S.A. Radiative transfer for inhomogeneous atmospheres: RRTM, a validated correlated-k model for the longwave. J. Geophys. Res. Space Phys. 1997, 102, 16663–16682. [Google Scholar] [CrossRef] [Green Version]
- Dudhia, J. Numerical study of convection observed during the winter monsoon experiment using a mesoscale two dimensional model. J. Atmos. Sci. 1989, 46, 3077–3107. [Google Scholar] [CrossRef]
- Hong, S.-Y.; Noh, Y.; Dudhia, J. A New Vertical Diffusion Package with an Explicit Treatment of Entrainment Processes. Mon. Weather Rev. 2006, 134, 2318–2341. [Google Scholar] [CrossRef] [Green Version]
- Lin, Y.-L.; Farley, R.D.; Orville, H.D. Bulk Parameterization of the Snow Field in a Cloud Model. J. Clim. Appl. Meteorol. 1983, 22, 1065–1092. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.-H.; Sun, W.-Y. A One-dimensional Time Dependent Cloud Model. J. Meteorol. Soc. Jpn. 2002, 80, 99–118. [Google Scholar] [CrossRef] [Green Version]
- Chen, F.; Dudhia, J. Coupling an advanced land surface-hydrology model with the Penn State-NCAR MM5 modeling system. Part I: Model implementation and sensitivity. Mon. Weather Rev. 2001, 129, 569–585. [Google Scholar] [CrossRef] [Green Version]
- Kain, J.S. The Kain–Fritsch Convective Parameterization: An Update. J. Appl. Meteor. 2004, 43, 170–181. [Google Scholar] [CrossRef] [Green Version]
- Parrish, D.F.; Derber, J.C. The National Meteorological Center’s Spectral Statistical-Interpolation Analysis System. Mon. Weather Rev. 1992, 120, 1747–1763. [Google Scholar] [CrossRef]
- Brewster, K.; Hu, M.; Xue, M.; Gao, J. Efficient Assimilation of Radar Data at High Resolution for Short-Range Numerical Weather Prediction. In Proceedings of the World Weather Research Program Symposium on Nowcasting and Very Short-Range Forecasting, WSN05, Tolouse, France, 5–9 September 2005. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Count | Experimental Name | Eta Level | Assimilation Setting | |
|---|---|---|---|---|
| Cycle Interval | Assimilation Timespan | |||
| 1 | CON | 30 | Without assimilation | |
| 2 | CONL60 | 60 | Without assimilation | |
| 3 | DL1h | 30 | 1 h | 0700–1100 |
| 4 | DL30m | 30 | 30 min | 0700–1100 |
| 5 | DL10m | 30 | 10 min | 0700–1100 |
| 6 | DL10mL60 | 60 | 10 min | 0700–1100 |
| 7 | DL10mCycle | 30 | 10 min | 0700–1300 |
| 8 | DL10mL60Cycle | 60 | 10 min | 0700–1300 |
| Time | 11:00 | 11:10 | 11:20 | 11:30 | ||||
|---|---|---|---|---|---|---|---|---|
| Experiments | CC | RMSE | CC | RMSE | CC | RMSE | CC | RMSE |
| CON | 0.603 | 7.173 | 0.616 | 5.878 | 0.319 | 7.320 | 0.334 | 8.572 |
| CONL60 | 0.608 | 7.159 | 0.601 | 6.029 | 0.301 | 7.507 | 0.308 | 8.682 |
| DL1h | 0.931 | 3.535 | 0.870 | 3.753 | 0.465 | 6.929 | 0.312 | 8.939 |
| DL30m | 0.932 | 3.544 | 0.834 | 4.121 | 0.387 | 8.037 | 0.274 | 9.442 |
| DL10m | 0.955 | 2.694 | 0.790 | 4.824 | 0.259 | 8.568 | 0.153 | 9.898 |
| DL10mL60 | 0.937 | 3.184 | 0.737 | 5.579 | 0.184 | 9.206 | 0.167 | 9.540 |
| DL10mCycle | 0.955 | 2.694 | 0.920 | 2.889 | 0.855 | 3.522 | 0.755 | 5.021 |
| DL10mL60Cycle | 0.937 | 3.184 | 0.896 | 3.314 | 0.850 | 3.670 | 0.638 | 5.918 |
| Experiment Name | U Component (m/s) | V Component (m/s) | ||
|---|---|---|---|---|
| CC | RMSE | CC | RMSE | |
| CON | −0.493 | 4.185 | 0.495 | 2.966 |
| CONL60 | −0.258 | 4.116 | 0.508 | 2.924 |
| DL1h | −0.298 | 4.284 | 0.502 | 2.994 |
| DL30m | −0.358 | 4.490 | 0.604 | 2.706 |
| DL10m | −0.277 | 4.483 | 0.741 | 2.265 |
| DL10mL60 | −0.085 | 3.979 | 0.751 | 2.228 |
| DL10mCycle | 0.489 | 3.134 | 0.803 | 2.055 |
| DL10mL60Cycle | 0.508 | 3.012 | 0.804 | 2.030 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Xie, N.; Fu, L.; Zhang, K.; Shao, A.; Yang, Y.; Ren, X. Impact of Lidar Data Assimilation on Low-Level Wind Shear Simulation at Lanzhou Zhongchuan International Airport, China: A Case Study. Atmosphere 2020, 11, 1342. https://doi.org/10.3390/atmos11121342
Li L, Xie N, Fu L, Zhang K, Shao A, Yang Y, Ren X. Impact of Lidar Data Assimilation on Low-Level Wind Shear Simulation at Lanzhou Zhongchuan International Airport, China: A Case Study. Atmosphere. 2020; 11(12):1342. https://doi.org/10.3390/atmos11121342
Chicago/Turabian StyleLi, Lanqian, Ningjing Xie, Longyan Fu, Kaijun Zhang, Aimei Shao, Yi Yang, and Xuwei Ren. 2020. "Impact of Lidar Data Assimilation on Low-Level Wind Shear Simulation at Lanzhou Zhongchuan International Airport, China: A Case Study" Atmosphere 11, no. 12: 1342. https://doi.org/10.3390/atmos11121342