CFD Models as a Tool to Analyze the Performance of the Hydraulic Agitation System of an Air-Assisted Sprayer



Abstract
:1. Introduction
2. Materials and Methods
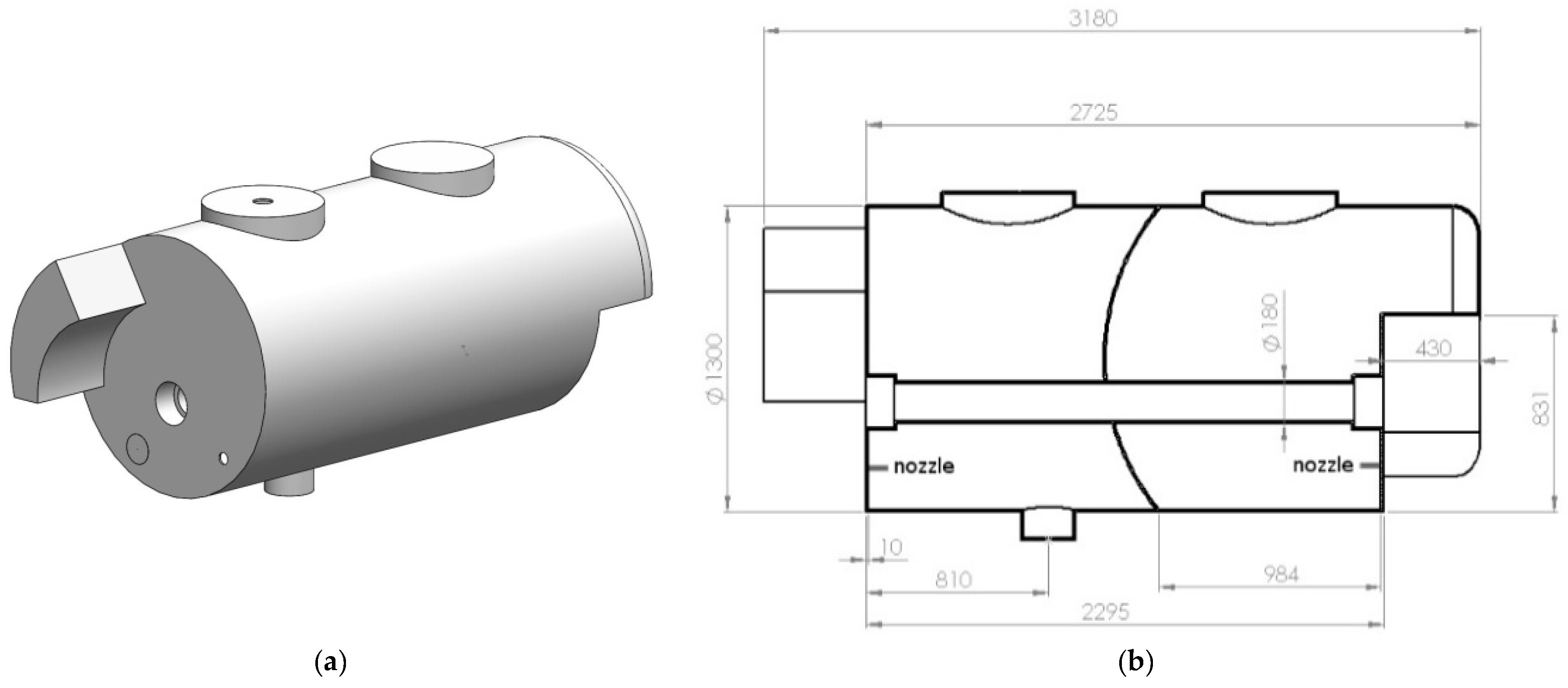
2.1. Agricultural Sprayer
2.2. Fluid Velocity Measurements
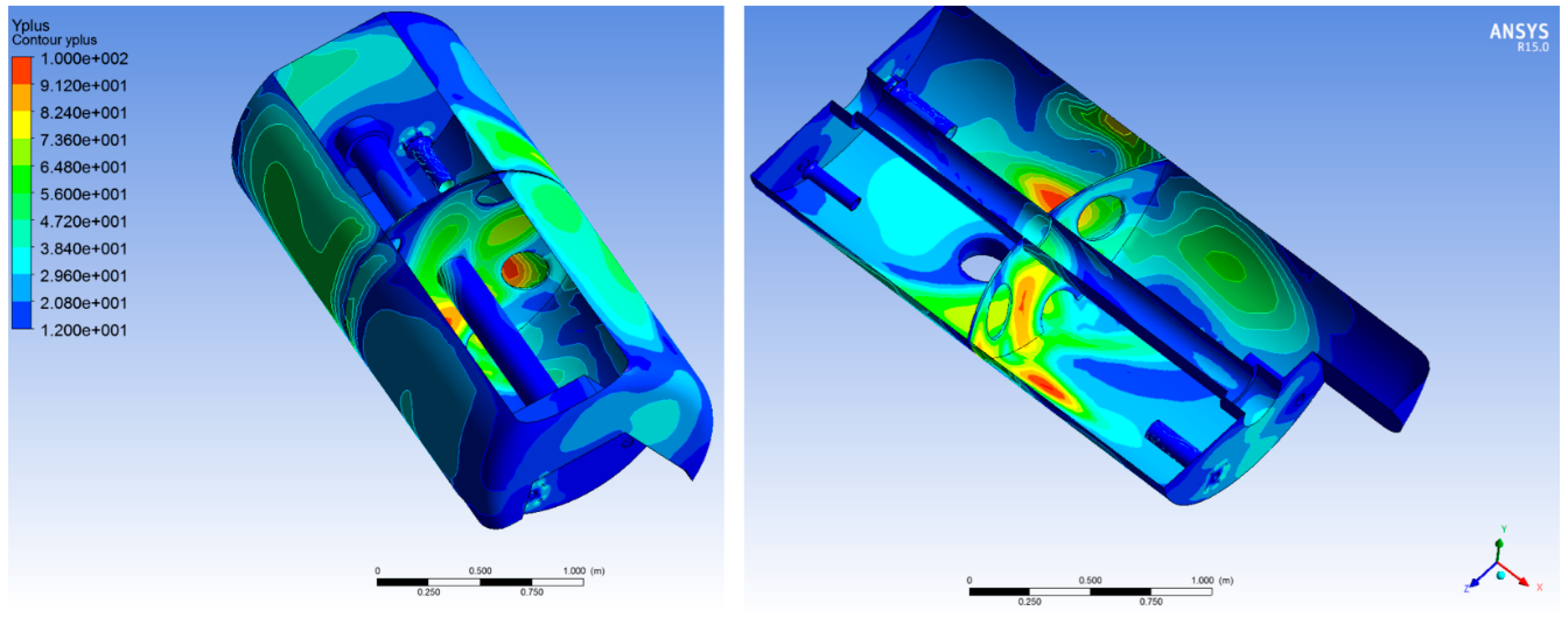
2.3. CFD Model
3. Results and Discussion
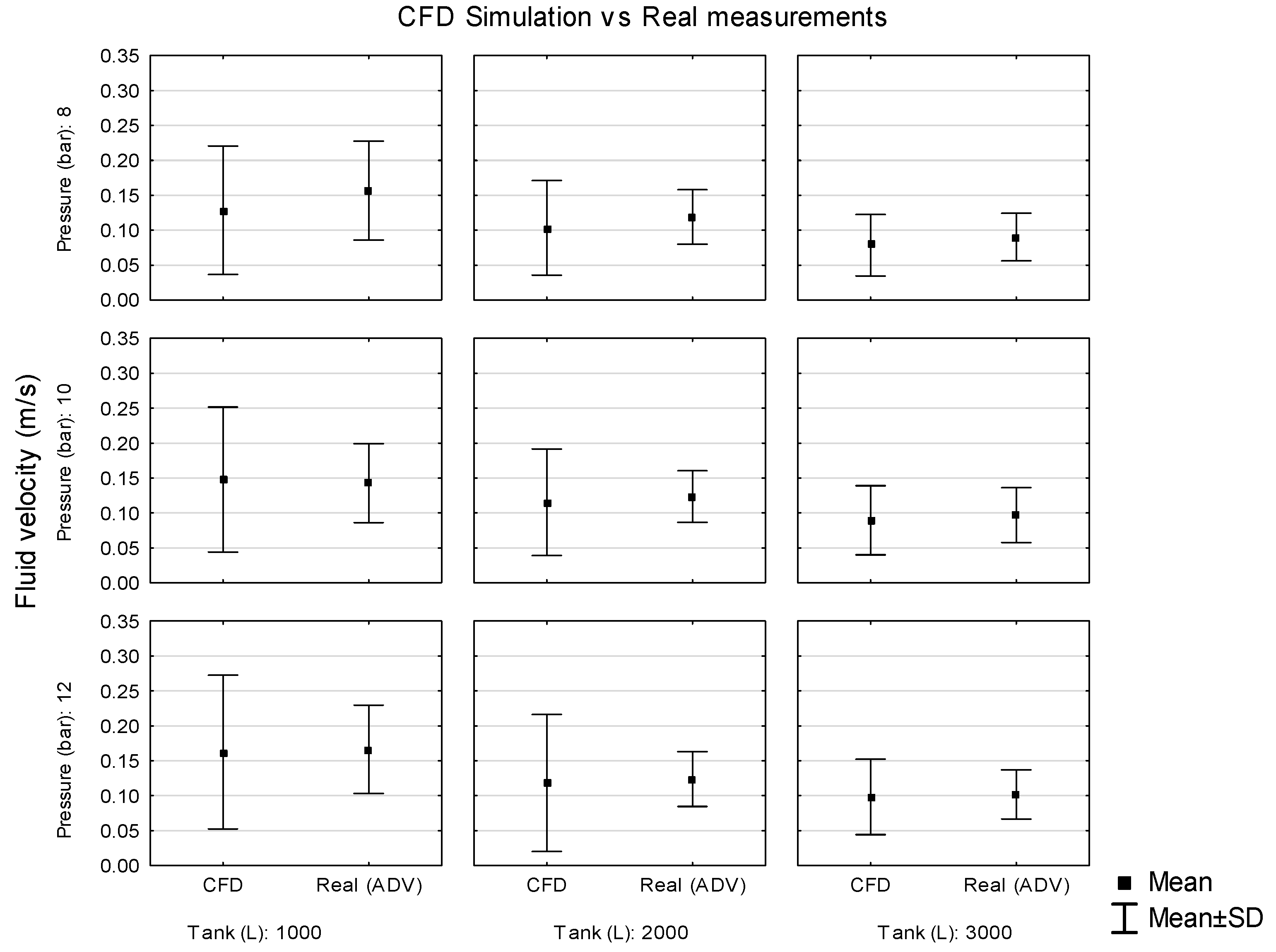
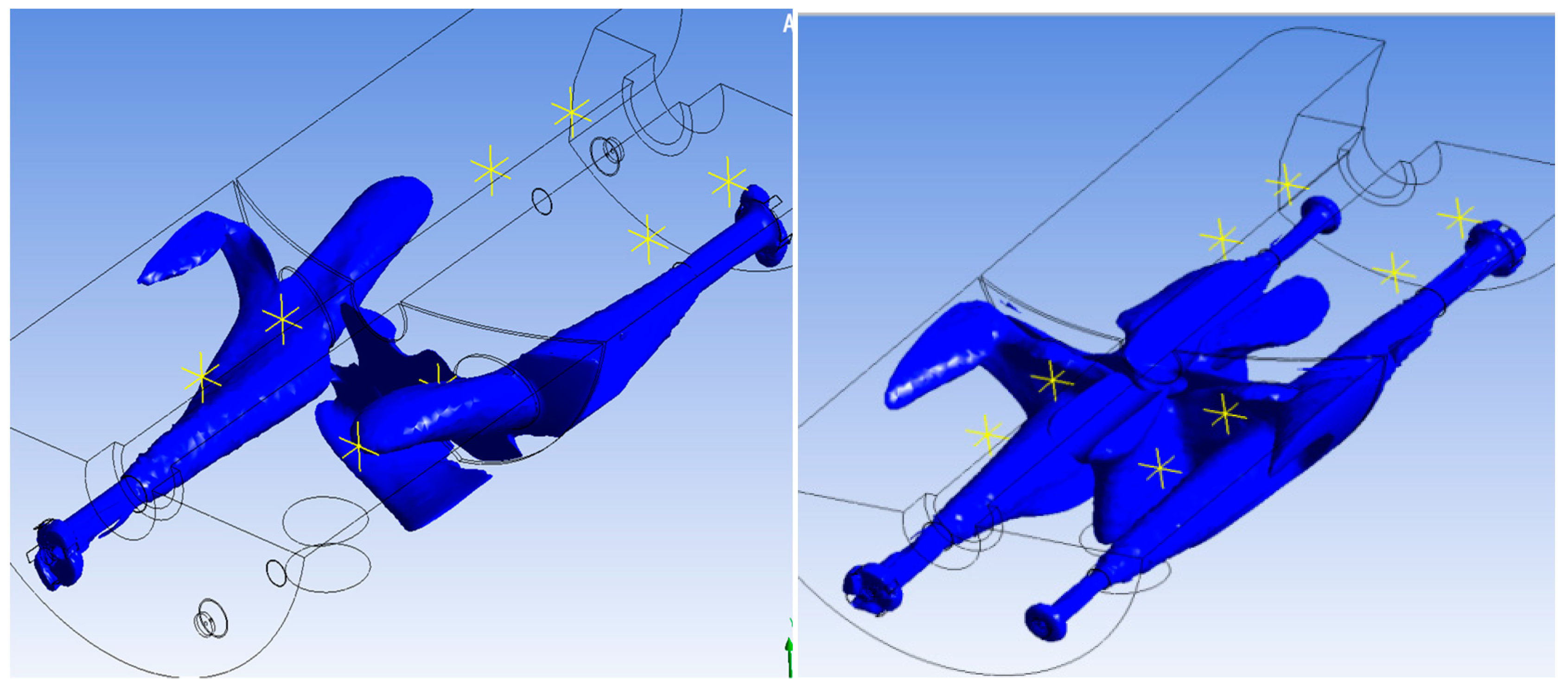
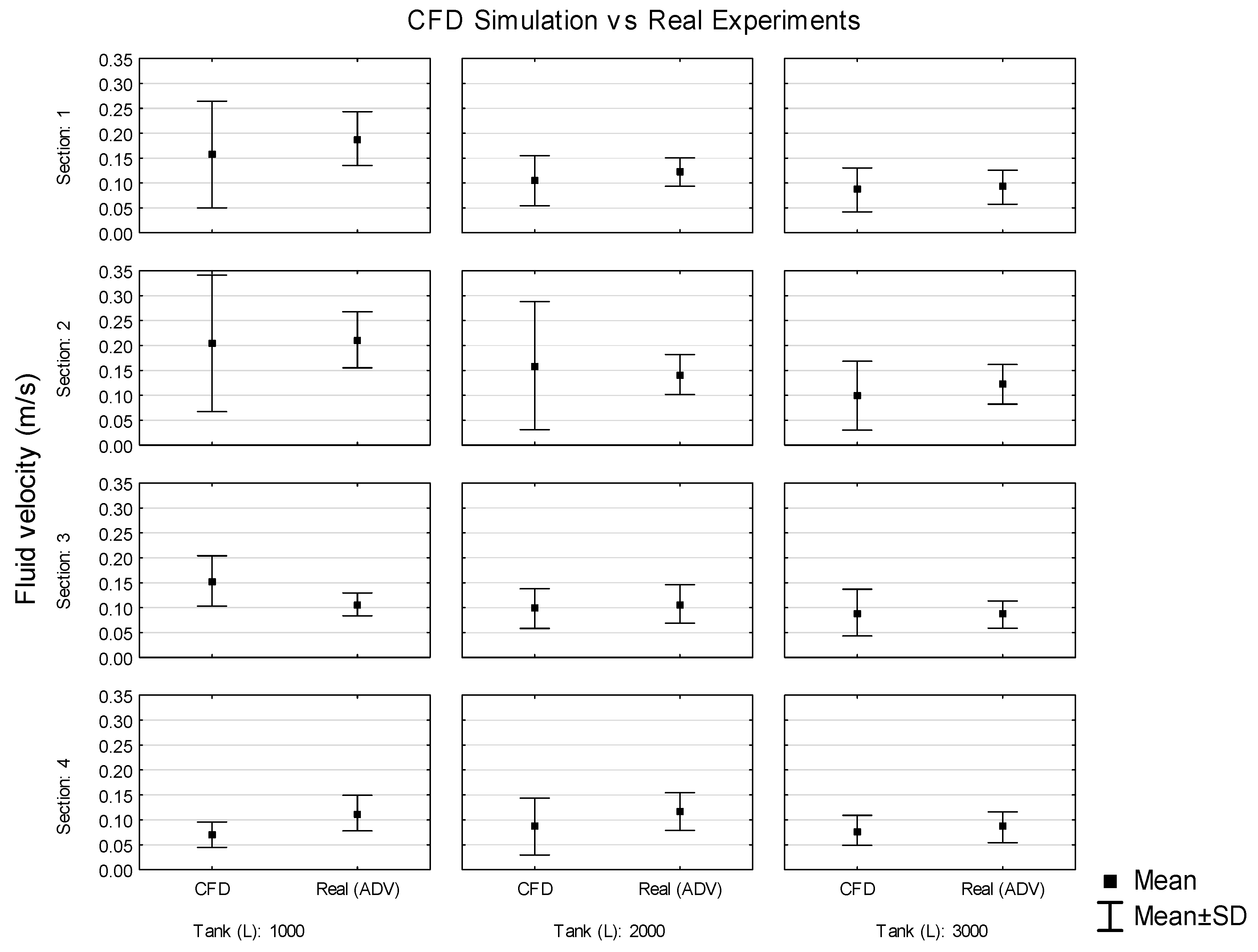
3.1. Mean CFD Velocities
3.2. Validation Error
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- ISO. Equipment for Crop Protection—Spraying Equipment–Part 2: Test Methods for Hydraulic Sprayers; ISO 5682-2; International Organization for Standadization: Geneva, Switerlrand, 1997. [Google Scholar]
- Balsari, P.; Tamagnone, M.; Allochis, D.; Marucco, P.; Bozzer, C. Sprayer tank agitation check: A proposal for a simple instrumental evaluation. In Proceedings of the Fourth European Workshop on Standardised procedure for the Inspection of Sprayers -SPISE 4-, Lana, Italy, 27–29 March 2012. [Google Scholar]
- Ozkan, H.E.; Ackerman, K.K. Instrumentation for measuring mixture variability in sprayer tanks. Appl. Eng. Agric. 1999, 15, 19–24. [Google Scholar] [CrossRef]
- Ucar, T.; Ozkan, H.E.; Fox, R.D.; Brazee, R.D.; Derksen, R.C. Experimental study of jet agitation effects on agrochemical mixing in sprayer tanks. J. Agric. Eng. Res. 2000, 78, 195–207. [Google Scholar] [CrossRef]
- Vondricka, J.; Schulze, P. Measurement of mixture homogeneity in direct injectionssystems. Trans. ASABE 2009, 52, 61–66. [Google Scholar] [CrossRef]
- Tamagnone, M.; Balsari, P.; Bozzer, C.; Marucco, P. Assesment of parameters needed to design agitation systems for sprayer tanks. Asp. Appl. Biol. 2012, 114, 167–174. [Google Scholar]
- García-Ramos, F.J.; Badules, J.; Bone, A.; Gil, E.; Aguirre, J.; Vidal, M. Application of an acoustic Doppler velocimeter to analyse the performance of the hydraulic agitation system of an agricultural sprayer. Sensors 2018, 18, 3715. [Google Scholar]
- Armenante, P.M.; Luo, C.; Chou, C.; Fort, I.; Medek, J. Velocity profiles in a closed unbaffled vessel: Comparison between experimental LDV data and numerical CFD predictions. Chem. Eng. Sci. 1997, 52, 3483–3492. [Google Scholar] [CrossRef]
- Ucar, T.; Fox, R.D.; Ozkan, H.E.; Brazee, R.D. Simulation of jet agitation in sprayer tanks: Comparison of predicted and measured water velocities. Trans. ASAE 2001, 44, 223–230. [Google Scholar] [CrossRef]
- Chen, M.; Ñiao, B.; Pan, J.; Li, Q.; Gao, C. Improvement of the flow rate distribution in quench tank by measurement and computer simulation. Mater. Lett. 2006, 60, 1659–1664. [Google Scholar] [CrossRef]
- Micheli, G.B.; Padilha, A.; Scalon, V.L. Numerical and experimental analysis of pesticide spray mixing in spray tanks. Eng. Agric. Jaboticaabal. 2015, 35, 1065–1078. [Google Scholar]
- Xiongkuy, H.; Kleisinger, S.; Luoluo, W.; Bingli, L. Influences of dynamic factors and filling level of spray in the tank on the efficacy of hydraulic agitation of the sprayer. Trans. Chin. Soc. Agric. Eng. 1999, 15, 131–134. [Google Scholar]
- García, C.M.; Cantero, M.I.; Niño, Y.; García, M.H. Turbulence measurements with acoustic Doppler velocimeters. J. Hydraul. Eng. 2005, 131, 1062–1073. [Google Scholar] [CrossRef]
- Poindexter, C.M.; Rusello, P.J.; Variano, E.J. Acoustic Doppler velocimeter-induced acoustic streaming and its implication for measurement. Exp. Fluids 2011, 50, 1429–1442. [Google Scholar] [CrossRef]
- MacVicar, B.J.; Beaulieu, E.; Champagne, V.; Roy, A.G. Measuring water velocity in highly turbulent flows: Field tests of an electromagnetic current meter (ECM) and an acoustic Doppler velocimeter (ADV). Earth Surf. Process. Landf. 2007, 32, 1412–1432. [Google Scholar] [CrossRef]
- Hosseini, S.A.; Shamsai, A.; Ataie-Ashtiani, B. Synchronous measurements of the velocity and concentration in low density turbidity currents using an acoustic Doppler velocimeter. Flow Meas. Instrum. 2006, 17, 59–68. [Google Scholar] [CrossRef]
- Sharma, A.; Maddirala, A.K.; Kumar, B. Modified singular spectrum analysis for despiking acoustic Doppler velocimeter (ADV) data. Measurement 2018, 117, 339–346. [Google Scholar] [CrossRef]
- Baker, T. Mesh generation: Art of Science? Prog. Aerosp. Sci. 2005, 41, 29–63. [Google Scholar] [CrossRef]
- Tamburini, A.; Cipollina, A.; Micale, G.; Brucato, A.; Ciofalo, M. CFD prediction of solid particle distribution in baffled stirred vessels under partial to complete suspension conditions. AIDIC Conf. Ser. 2013, 11, 391–400. [Google Scholar] [CrossRef]
- Akiti, O.; Armenante, P.M. Experimentally-Validated Micromixing-Based CFD Model for Fed-Batch Stirred-Tank Reactors. AIChE J. 2004, 50, 566–577. [Google Scholar] [CrossRef]
- Deglon, D.A.; Meyer, C.J. CFD modelling of stirred tanks: Numerical considerations. Miner. Eng. 2006, 19, 1059–1068. [Google Scholar] [CrossRef]
- Wasewar, K.L.; Sarathi, J.V. CFD modelling and simulation of jet mixed tanks. Eng. Appl. Comput. Fluid Mech. 2008, 2, 155–171. [Google Scholar] [CrossRef] [Green Version]
- Oca, J.; Masalo, I. Flow pattern in aquaculture circular tanks: Influence of flow rate, water depth, and water inlet & outlet features. Aquacult. Eng. 2013, 52, 65–72. [Google Scholar]
- Delele, M.A. Engineering Design of Spraying Systems for Horticultural Applications Using Computational Fluid Dynamics. Ph.D. Thesis, Leuven Catholic University, Leuven, Belgium, 2009. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1000 L Mesh | 2000 L Mesh | 3000 L Mesh | |
|---|---|---|---|
| Number of cells | 965,063 | 1,494,857 | 1,046,289 |
| Minimum cell size | 4.42 × 10−4 m | 4.55 × 10−4 m | 4.75 × 10−4 m |
| Maximum cell size | 0.025 m | 0.025 m | 0.035 m |
| Mesh type | unstructured | ||
| Meshed in walls | 6 layers | ||
| Maximum Cell Dimension (mm) | |||
|---|---|---|---|
| Tank level (L) | 25 | 35 | 50 |
| 1000 | 965,063 * | 578,617 | 485,779 |
| 2000 | 1,494,857 * | 772,332 | 574,015 |
| 3000 | 2,142,219 | 1,046,289 * | 670,288 |
| Real Experiment | CFD Simulations | |
|---|---|---|
| Mean (m/s) | 0.1126 | 0.1041 |
| Standard deviation | 0.0460 | 0.0723 |
| Model | 2 Active Nozzles | 4 Active Nozzles | ||||
|---|---|---|---|---|---|---|
| 8 Bar | 10 Bar | 12 Bar | 8 Bar | 10 Bar | 12 Bar | |
| 1000 | 20% | 12% | 8% | 14% | 7% | 14% |
| 2000 | 10% | 4% | 12% | 16% | 10% | 5% |
| 3000 | 23% | 16% | 14% | 3% | 1% | 7% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Badules, J.; Vidal, M.; Boné, A.; Gil, E.; García-Ramos, F.J. CFD Models as a Tool to Analyze the Performance of the Hydraulic Agitation System of an Air-Assisted Sprayer. Agronomy 2019, 9, 769. https://doi.org/10.3390/agronomy9110769
Badules J, Vidal M, Boné A, Gil E, García-Ramos FJ. CFD Models as a Tool to Analyze the Performance of the Hydraulic Agitation System of an Air-Assisted Sprayer. Agronomy. 2019; 9(11):769. https://doi.org/10.3390/agronomy9110769
Chicago/Turabian StyleBadules, Jorge, Mariano Vidal, Antonio Boné, Emilio Gil, and F. Javier García-Ramos. 2019. "CFD Models as a Tool to Analyze the Performance of the Hydraulic Agitation System of an Air-Assisted Sprayer" Agronomy 9, no. 11: 769. https://doi.org/10.3390/agronomy9110769