1. Introduction
In recent years, due to climate change, it has become clear that the agricultural sector faces significant challenges in providing food of high quality and sufficient quantity to feed the entire population. In viticulture, specifically, the abrupt changes in temperature and humidity have contributed to the high occurrence of various grape diseases, such as downy mildew, powdery mildew, black rot, and botrytis, which can significantly affect the production and quality of table grapes. As a result, it is imperative for the research community to develop cost-effective methods that can automatically identify vulnerable-to-disease grape clusters before they are infected. These methods should be capable of accurately detecting grape clusters and estimating their maturity, as high sugar levels are accompanied by an increased risk of disease development, so farmers can optimize their harvests and enhance the overall quality of their produce. Through the robust estimation of grape maturity levels, such methods can also inform farmers about the correct time to harvest their grapes, contributing to the improvement of the quality and quantity of grapes sent to consumers.
Fortunately, advances in machine learning and sensor technologies have provided important tools for the development of automated methods for grape-bunch identification and maturity estimation. Regarding grape-bunch identification, early works relied on traditional machine learning techniques, such as support vector machines (SVMs) [
1,
2] and artificial neural networks (ANNs) [
3], as well as image-filtering approaches, such as thresholding, mathematical morphology operators, and edge detection [
4,
5,
6,
7].
Recently, the success of deep learning in various computer vision applications has also led to its adoption for grape-bunch identification [
8]. Powerful object detection models, such as Fast R-CNN [
9], Faster R-CNN [
10], Mask R-CNN [
11], and YOLO [
12], have been employed in the context of grape segmentation, achieving remarkable accuracy and real-time performance. These models initially employ convolutional neural networks (CNNs) to identify image regions as candidates for the location of the object of interest, and then they classify the objects in the candidate image regions into specific classes.
In [
13], the authors employed Mask R-CNN, YOLOv2 [
14], and YOLOv3 [
15] for accurate grape segmentation and showed that Mask R-CNN achieved superior performance compared to the other networks. In a similar fashion, the authors of [
16] employed YOLOv4 [
17] to detect and quantify the grape yield in vineyards and found that YOLOv4 primarily detected large grape bunches due to occlusions of smaller grape bunches by leaves. Through extensive experimental results, the authors of [
18] showed that YOLOv5x can achieve optimal performance in correctly detecting grape bunches, while the authors of [
19] concluded that YOLOv5s can meet the precision and real-time performance requirements for grape-cluster detection. Finally, the authors of [
20] employed more advanced YOLO network architectures (i.e., YOLOv5x6, YOLOv7-e6e, and YOLOR-CSP-X) to detect and classify grape bunches as healthy or damaged. Additionally, the authors created two new publicly available datasets for grape-bunch detection and classification with the same 910 original images and 1066 annotated grape bunches, augmented through scaling, rotation, translation, and blurring operations, ultimately leading to around 10 K images and more than 11.6 K grape bunches.
On the other hand, Shen et al. [
21] introduced a novel method to accurately identify veraison in colored wine grapes under natural field-growing conditions. Initially, the authors utilized a semantic segmentation model to effectively eliminate the irrelevant background, and then a Mask R-CNN pipeline, which incorporates anchor parameter optimization, was utilized to further enhance the accuracy and robustness of the grape identification process. Finally, to deal with issues regarding grape-cluster overlapping and occlusions, Chen et al. in [
22] employed the post-processing algorithm of Mask R-CNN, enhanced by the linear weighting method of the soft non-maximum suppression (Soft-NMS) algorithm [
23], achieving significant performance improvements. To improve real-time performance in grape bunch detection, the authors of [
24] combined a Swin Transformer [
25] with YOLOv5. Their model was tested on two different grape varieties, ‘Chardonnay’ and ‘Merlot’, and under different conditions, including two weather conditions, two berry maturity stages, and three sunlight intensities. A comparison with other common detectors, such as Faster R-CNN, YOLOv4, and YOLOv5, revealed the superior performance that can be achieved when a Transformer network is combined with an object detection network. However, the complicated environment of vineyards, with varying illumination conditions and occlusions, and the lack of large annotated public datasets can significantly affect the performance of these methods.
Regarding grape maturity estimation, there are two main methods used in viticulture to estimate the maturity level of grapes. The first one is the traditional method, where we measure the sugar level using a specific instrument that is usually calibrated in Brix or pH, called a refractometer [
26]. However, this specialized sensor is costly and requires farmers with technological knowledge to handle it. The second and most cost-effective solution involves the processing of grape images using machine learning and Artificial Intelligence (AI) techniques. A comprehensive review of these techniques in viticulture, along with a new dataset (i.e., GrapeCS-ML) that contains images of grape varieties at different stages of development, together with the corresponding ground-truth data obtained through chemical analysis (i.e., pH and Brix), can be found in [
27].
To estimate grape maturity, color images have been utilized and processed using standard machine learning algorithms, such as artificial neural networks [
28,
29], random forests [
30], unsupervised clustering [
31], and CNNs [
32,
33,
34,
35]. For ground-truth maturity levels, some methods in the literature have utilized grape color and shape information [
28,
30,
31,
36], the knowledge of the harvesting week [
33], and well-known chemical indices, such as total soluble solids (TSSs), titratable acidity (TA), and pH [
29]. Attention mechanisms have also been employed, achieving significant performance improvements in grape maturity estimation. An improved SM-YOLOv4 algorithm that utilizes YOLOv4, as well as Mobilenetv3 and the SENet attention mechanism as the backbone feature extraction network, was proposed in [
34] to increase inference speed, improve robustness, and make the network more lightweight. In addition, a novel Mask R-CNN-based algorithm that utilizes three different attention mechanism modules (i.e., squeeze-and-excitation attention (SE), convolutional block attention (CBAM), and coordinate attention (CA)) in its ResNet backbone was proposed in [
35].
Other works have utilized hyperspectral or multispectral images to improve classification accuracy and robustness. In [
37], partial least-squares regression (PLSR) and neural networks were utilized to estimate the quality of grapes from sugar content predictions based on hyperspectral imaging. The results suggest that the combination of hyperspectral imaging with appropriate chemometric techniques or machine learning algorithms can lead to satisfactory generalization for vintages not employed in model training. Similarly, the authors of [
38] proposed a CNN-based method to predict two important enological parameters (i.e., sugar level and pH) from hyperspectral images and achieved excellent overall performance, even for different varieties or vintages that were not employed during training. On the other hand, dimensionality reduction methods were studied in [
39] for the prediction of sugar content from hyperspectral images of wine grape berries. The authors combined hyperspectral imaging with neural networks, achieving good generalization capacity across different datasets.
Similarly, the authors of [
40] tested a multilayer perceptron (MLP) and a 3D-CNN network in a novel multispectral dataset of grape images, coupled with measurements such as weight, anthocyanin content, and Brix index, achieving very high accuracy. In [
41], data from canopy reflectance sensors, as well as Unmanned Aerial Vehicle (UAV) and satellite images, were processed using open-source AutoML techniques for robust prediction of grape-quality attributes. On the other hand, absorbance and fluorescence data of Cabernet Sauvignon grape samples were employed to predict relevant grape indices in terms of technological, phenolic, and flavor maturity in [
42]. Finally, in [
43], four different machine learning algorithms (i.e., PLSR, random forest regression, support vector regression (SVR), and CNN) were employed to estimate grape ripeness in Brix from hyperspectral data received from a contact probe spectrometer. The authors concluded that the CNN model outperformed the other algorithms in most test cases.
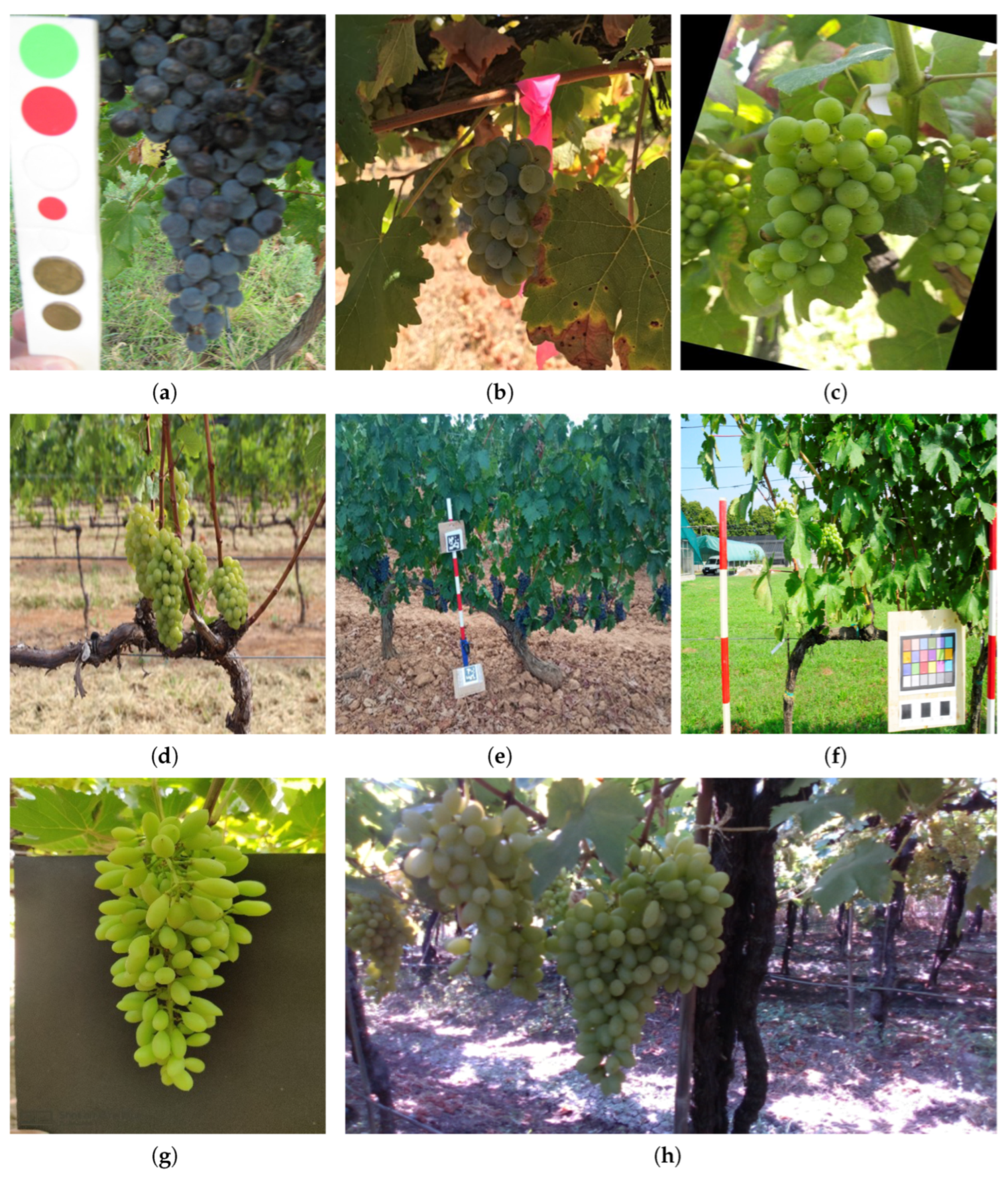
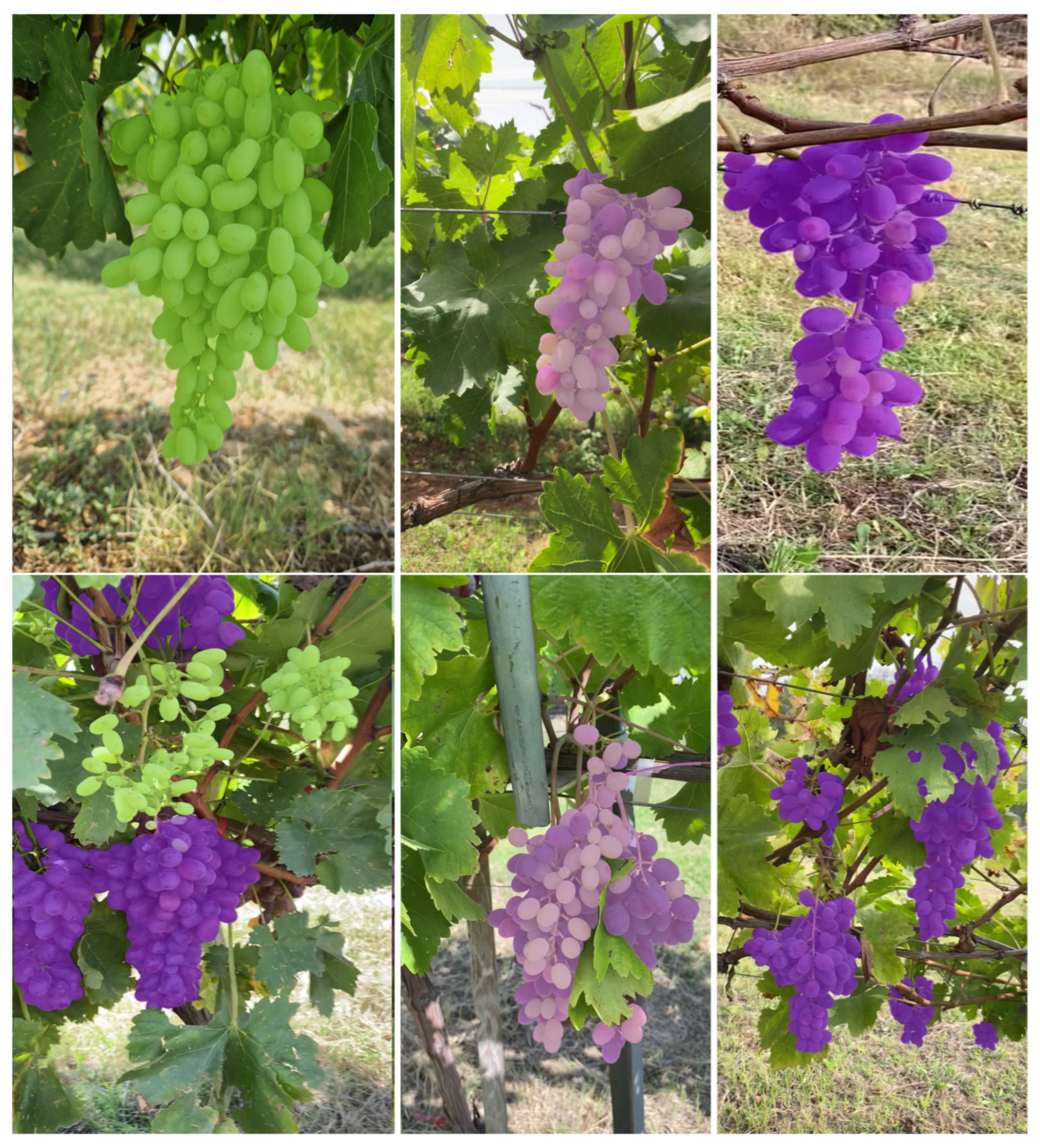
Despite the high performance of the aforementioned deep learning algorithms in grape segmentation and maturity estimation, there is still room for improvement so that these algorithms can be used in real-life applications. In principle, deep learning algorithms usually require more data than traditional machine learning techniques and thus they are heavily dependent on large, annotated datasets to achieve high accuracy, robustness, and generalization. To address this need, several datasets encompassing different data types (e.g., images, sugar levels, hyperspectral information) have been proposed in the literature, but they remain too small to be successfully employed for deep learning training. This work proposes one of the largest annotated grape datasets to date, called the CERTH grape dataset, whose purpose is to be used for the training and optimization of both grape segmentation and maturity estimation algorithms. The images in the dataset depict table grapes from the Crimson Seedless variety, which were captured under different environmental conditions and with significant occlusions between grape clusters and leaves. Thus, the size and the challenging nature of the CERTH grape dataset can substantially benefit any machine learning method trained and evaluated on it. As a result, the main contributions of this work are as follows:
The new CERTH grape dataset is one of the largest grape segmentation and maturity estimation datasets in the literature. It consists of around 2.5 K images, captured under varying illumination and viewing conditions, with strong occlusions between grape bunches and leaves. The dataset contains almost 10 K annotated grape bunches, which are further classified into three maturity classes (i.e., immature, semi-mature, and mature).
A plethora of state-of-the-art object detection methods are trained and evaluated on the CERTH grape dataset, providing a baseline for future research and showcasing the challenging nature of the CERTH grape dataset.
3. Results and Discussion
This section presents the experimental results related to the evaluation of a plethora of state-of-the-art object detection methods in the task of grape segmentation and maturity estimation using the CERTH grape dataset. These experiments aim to provide a baseline for the development and evaluation of future object detection algorithms. To this end, the 13 different object detection methods introduced in
Section 2.3 were tested on the multiple-instance/multi-class CERTH grape dataset, as well as on the single-instance/one-class subset of the CERTH grape dataset. As far as the implementation details are concerned, all the network architectures utilized were the default ones provided by the MMDetection toolbox, with the differences lying in the number of classes of the head, which was set to 3 (i.e., the number of maturity levels). As a result, all object detection methods were trained to identify both the location and maturity level of grape bunches in a similar fashion to the COCO models, which identify both object boundaries and classes. The RPN anchors were the default values, configured to have one scale of a size of 8 pixels and three aspect ratios, which were 0.5, 1.0, and 2.0. In addition, Mask2Former’s object queries were set to 100.
Table 3 presents the sizes of the tested object detection methods. In
Table 3, it can be observed that the YOLOv8 networks were the most lightweight, with less than 12 M parameters. On the other hand, Cascade Mask R-CNN-R101 and HTC-R101 were the largest networks, with more than 96 M parameters. Such large networks usually require large datasets for effective training, and the aim of this work was to provide one such dataset for the tasks of grape segmentation and maturity estimation.
The CERTH grape dataset was split into training, validation, and test sets, with each set representing 80%, 10%, and 10% of the dataset for each class, ensuring equal distribution of samples per class among all sets. The performance of the methods was measured using the standard metric of mean average precision (mAP) with predictions of either bounding boxes or masks, depending on the capabilities of the specific method. Mean average precision was computed by taking the average precision for the confidence threshold of 0.3 and IoU thresholds ranging from 0.5 to 0.95 with an increment of 0.05. In addition, precision, recall, and F1-score metrics were utilized for predictions with an IoU threshold of 0.5 and a confidence threshold of 0.3.
Table 4 and
Table 5 present the experimental results of the different object detection methods on the test set of the CERTH grape dataset (i.e., multiple-instance/multi-class scenario) and on the single-instance/one-class subset of the CERTH grape dataset, respectively, in the form of bounding box/mask performance.
From the experimental results in
Table 4 and
Table 5, it can be concluded that the optimal performance was achieved by the Mask2Former-Swin(S) algorithm. More specifically, Mask2Former-Swin(S) significantly outperformed all the other algorithms by at least 6% in both scenarios, achieving an mAP of 51.5% and 83.7% in mask prediction in the multiple-instance/multi-class and single-instance/one-class scenarios, respectively. Of significance was the performance of the YOLOv8s algorithm, which was able to achieve the second-highest accuracy in the prediction of bounding boxes for both scenarios, even overcoming the accuracy of the Mask R-CNN-Swin(S) algorithm. Moreover, the comparison of the Mask R-CNN algorithm with a backbone of ResNet or the Swin Transformer showed that the Swin Transformer was capable of better modeling the input image compared to ResNet, effectively leading to an overall improvement in the accuracy of the Mask R-CNN algorithm in grape segmentation and maturity estimation by at least 2% in the multiple-instance/multi-class scenario and 1.6% in the single-instance/one-class scenario. Finally, among all the versions of the YOLO algorithms, YOLOv8 achieved the best results, with a significant accuracy margin of at least 11% compared to YOLOv3.
Similar conclusions can be drawn for the other metrics. Mask2Former-Swin(S) achieved the highest F1-score, with a value of 0.79 for the bounding boxes and 0.83 for the masks. From the recall and precision values, it can be seen that most of the grape bunches were correctly identified by all the object detection algorithms (recall ranged from 0.84 to 0.96). However, the algorithms tended to make several mistakes through detections that were not actual grape bunches (i.e., false positives), with precision ranging from 0.57 to 0.73. These false positives were usually parts of grape bunches that were identified by the object detection algorithms as individual instances and rarely background objects that were identified as grape bunches. This observation verifies an inherent issue in grape segmentation concerning the correct delineation of individual grape bunches, especially when such bunches are occluded by other bunches or background objects.
Additionally, for the four state-of-the-art mask-prediction object detection algorithms (i.e., Cascade Mask R-CNN-R101, HTC-R101, Mask R-CNN-Swin(S), and Mask2Former-Swin(S)), a different presentation of the results based on the maturity level of the grape bunches was performed. The aim of this experiment was to analyze the performance of a few of the best-tested object detection algorithms in terms of their ability to correctly classify the maturity levels of the grape bunches and use these results as a baseline for evaluations in future research.
Table 6 and
Table 7 present the performance of the four object detection algorithms in the task of grape maturity level estimation in the multiple-instance/multi-class and single-instance/one-class scenarios, respectively.
From the results in
Table 6 and
Table 7, it can be concluded that the Mask2Former-Swin(S) achieved the best performance in every maturity level category, outperforming all the other algorithms by a significant margin. A comparison of the maturity level estimation results revealed that all the tested algorithms achieved the highest accuracy for the mature class, whereas the lowest accuracy was achieved for the semi-mature class. This can be attributed to the color discrepancies among the mature red grapes, the immature yellow grapes, and the leaves, which led the yellow grapes to be more easily blended with the leaves compared to the red grapes. On the other hand, the existence of semi-mature grape bunches with red and yellow grapes in the same bunch posed challenges for the object detection algorithms in accurately segmenting them from the background. Moreover, the high accuracy for the mature class can also be attributed to the fact that the samples for this class were five times greater than the samples for the other two classes. These results further support the need for large, annotated datasets to enhance the accuracy and robustness of grape segmentation and maturity estimation algorithms.
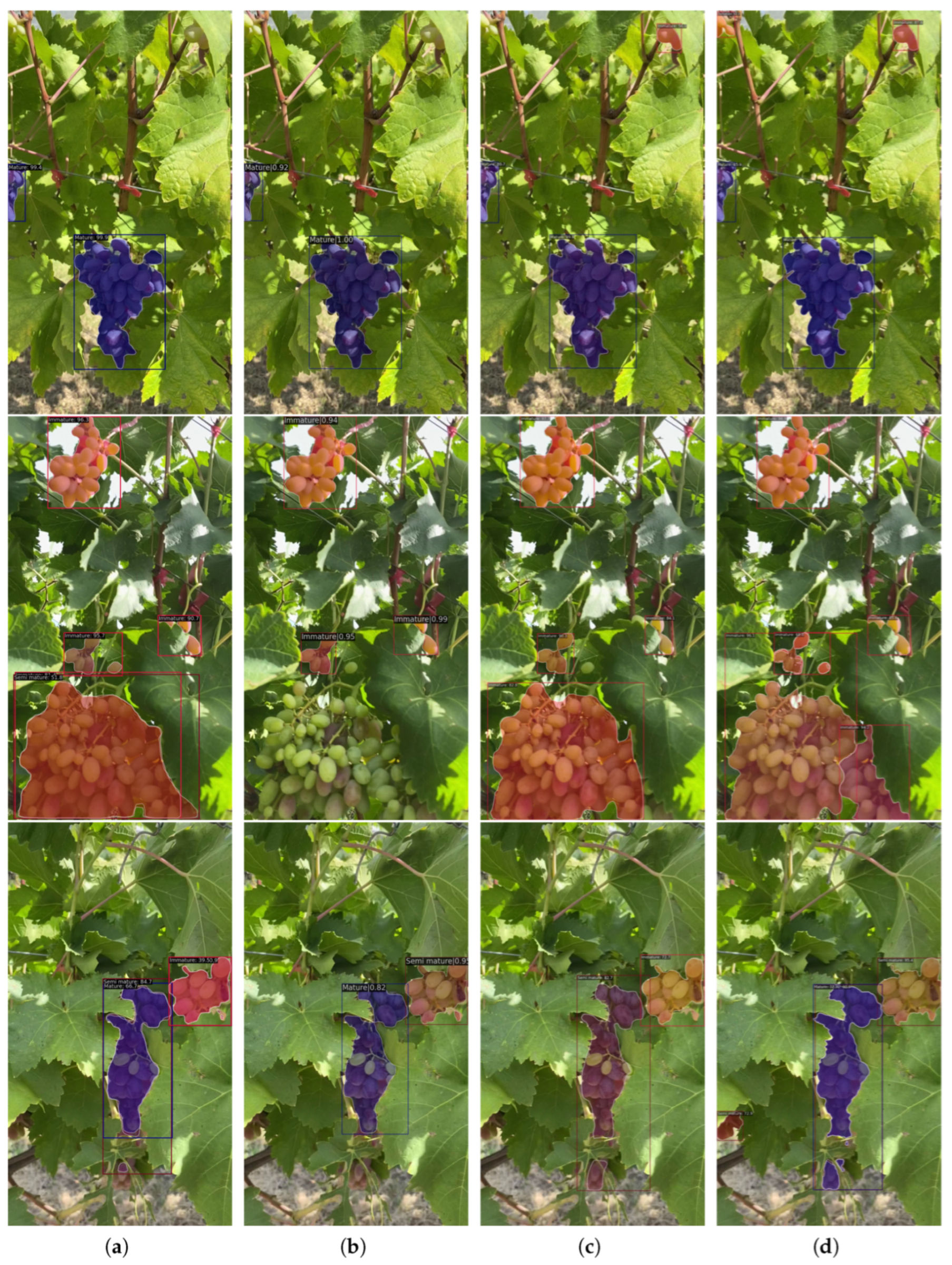
Figure 5 presents a few images from the CERTH grape dataset, along with the predictions made by the four state-of-the-art object detection algorithms, namely Cascade Mask R-CNN-R101, HTC-R101, Mask R-CNN-Swin(S), and Mask2Former-Swin(S). From these images, a few important observations can be made regarding the performance of the algorithms in grape segmentation and maturity estimation. Although Cascade Mask R-CNN-R101 estimated the maturity levels of the grape bunches with high accuracy, it faced problems with the segmentation of small bunches, and it made several predictions for the same grape bunch. Similarly, HTC-R101 failed to segment small bunches, and it also had issues with detecting the large grape bunch in the image in the second row of
Figure 5. On the other hand, Mask R-CNN-Swin(S) managed to identify even small grape bunches in the images but at the expense of incorrectly estimating the maturity levels of some grape bunches. Finally, Mask2Former-Swin(S) successfully detected all grape bunches, even ones of small sizes, in the images, and correctly predicted the maturity levels of most grape bunches, achieving the best accuracy among all the state-of-the-art algorithms on the CERTH grape dataset. However, Mask2Former-Swin(S) incorrectly split the large grape bunch in the image in the second row of
Figure 5 into three sub-bunches.
From
Figure 5, it is clear that almost all tested algorithms faced difficulties in accurately detecting and correctly estimating the maturity of grape bunches in the images. This inability stems from the challenging nature of the CERTH grape dataset, which contains images with significant illumination variations, grape bunches captured under different viewing angles and focal lengths, and occlusions between grape bunches and between grape bunches and leaves. These challenges are further enhanced by the complex environment of the vineyard and the trellis system that is used for systematic cultivation.
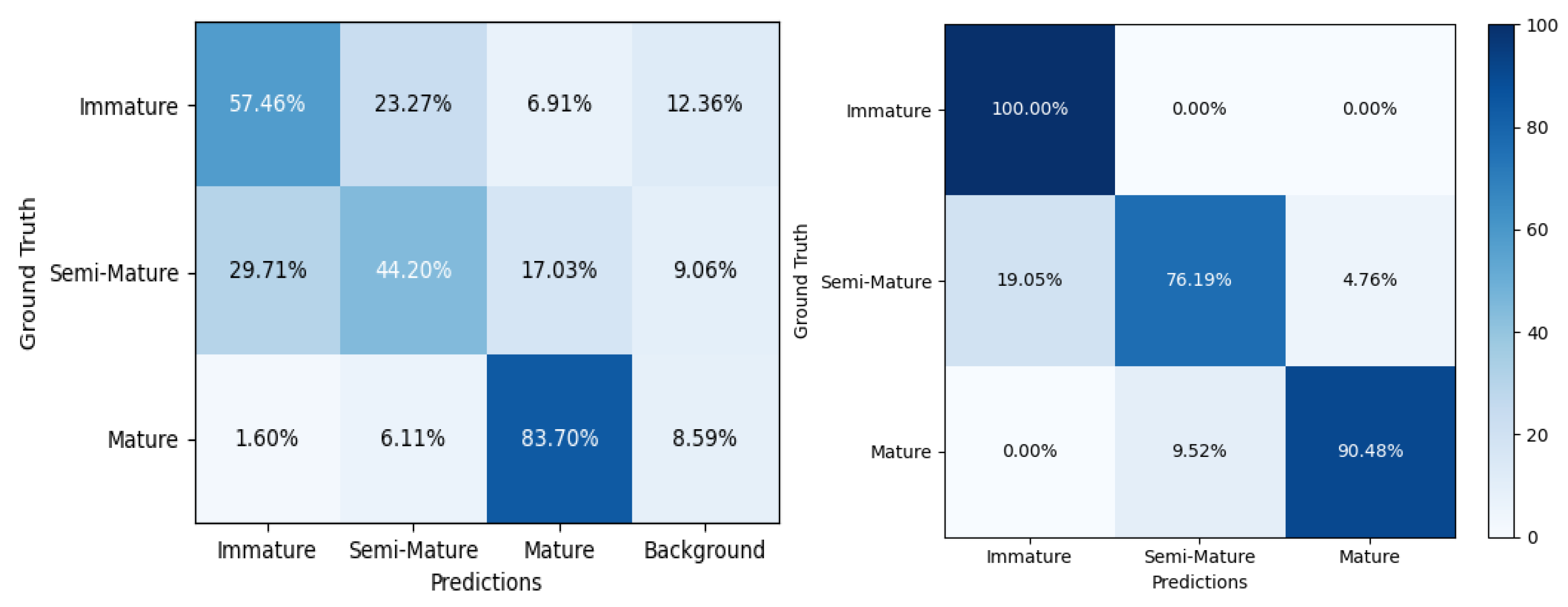
Finally,
Figure 6 presents two confusion matrices, which describe the maturity estimation results of the best-performing algorithm (i.e., Mask2Former-Swin(S)) in the multiple-instance/multi-class and single-instance/one-class scenarios. From the results, it can be seen that the most challenging class for correct classification was the semi-mature class. This can be attributed to the fact that the color of grapes can be both yellow and red, which posed challenges to the performance of the object detection algorithm. Of significant interest are the results in the confusion matrix of the multiple-instance/multi-class scenario regarding the misclassifications of the background. From these results, it can be determined that more than 12% of the immature grape bunches were not correctly identified, a percentage that fell to almost 8.6% in the case of the mature grape bunches. These results can be attributed to the yellow color of the immature grape bunches, which can be easily mistaken for the leaves in the complex environment of a vineyard, whereas the red mature grape bunches can be better distinguished from the background.
The aforementioned results reveal that the CERTH grape dataset is quite challenging due to the large number of grape bunches, the illumination variations, and the occlusions between grape bunches and between bunches and leaves. The results presented in other works show that even traditional machine learning algorithms can achieve high performance on publicly available datasets. For instance, the authors of [
27] employed several traditional machine learning algorithms (e.g., SVM, k-NN, classification trees, etc.) for grape detection on the Grape CS-ML dataset, achieving high accuracy of more than 80% and 85% for white and red grape varieties, respectively. In future work, they stated the need to collect more data and experiment with more complex deep learning networks to facilitate research in viticulture. On the other hand, the authors of [
20] tested three YOLO networks for grape bunch identification, concluding that the best performance was achieved by YOLOv7, with a precision of 98%, a recall of 90%, an F1-score of 94%, and an mAP of 77%. Similarly, the authors of [
56] tested their proposed model, consisting of a Transformer network and a multi-scale feature extractor inspired by YOLO, on the wGrapeUNIPD-DL dataset, achieving a precision of 85.7%, a recall of 62.3%, an F1-score of 72.2%, and an mAP of 72.8%. The same authors tested their model on the Embrapa WGISD dataset, achieving a precision of 88.6%, a recall of 78.3%, an F1-score of 83.1%, and an mAP of 87.7%. These results demonstrate the enhanced performance of the object detection methods tested on the currently available datasets, with mAPs higher than 70%. The results on the Grapevine bunch (condition) detection and Embrapa WGISD datasets reveal high accuracy and recall results, meaning that the tested object detection methods can easily detect the actual grape bunches without producing a lot of false positives. On the other hand, the results on the wGrapeUNIPD-DL dataset reveal a high precision of 78.3%, with a mediocre recall of 62.3%, meaning that the tested object detection methods do not identify a lot of false positives but fail to recognize the actual grape bunches.
In comparison to previous works, the best-performing model on the proposed dataset achieved an mAP of 52.3%, a precision of 68%, and a recall of 95%. This means that the model recognized almost every annotated grape bunch but also produced a lot of false positives. When the task of grape bunch segmentation was simplified by cropping a single grape bunch in each image (single-instance/one-class scenario), thus removing most of the background objects and occlusions, the performance of all object detection methods significantly improved, with Mask2Former-Swin(S) achieving an mAP of 85.7% and an F1-score of 96%. However, in real-life applications, the complex environment of a vineyard with varying lighting conditions and strong occlusions can pose significant challenges to a grape segmentation and maturity estimation algorithm, thus demonstrating the importance of developing challenging datasets that can thoroughly test the performance of such algorithms.

 ,
, 






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}