

Identification of Water Layer Presence in Paddy Fields Using UAV-Based Visible and Thermal Infrared Imagery

Abstract
:1. Introduction
2. Materials and Methods
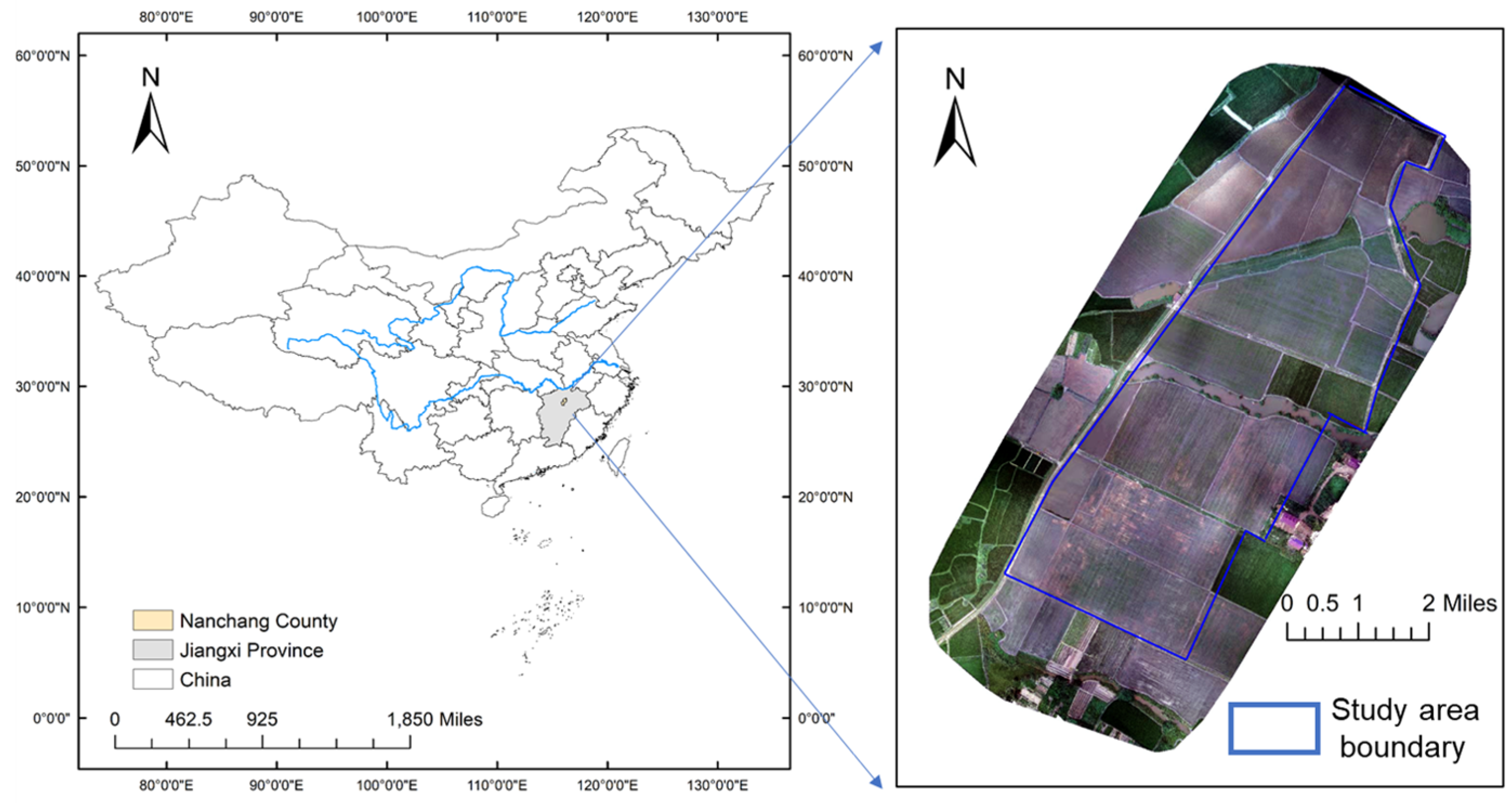
2.1. Experimental Design and Data Collection
2.1.1. Experimental Design
2.1.2. UAV Thermal Infrared and Visible Imagery Acquisition
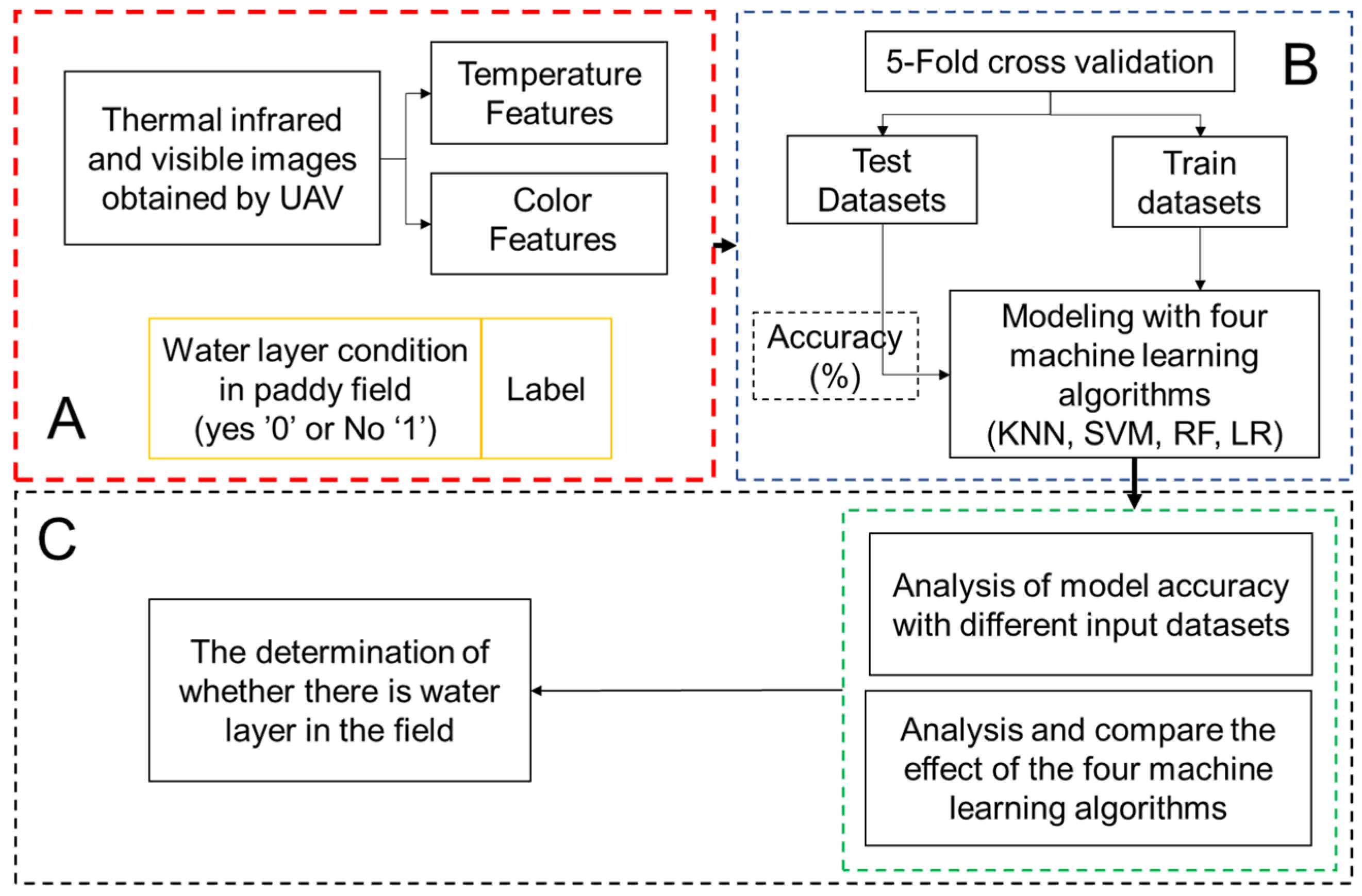
2.2. Extraction of Feature Values Derived from UAV Images
2.2.1. Temperature Features
2.2.2. Color Features
2.3. Machine-Learning Algorithms Used
2.4. Construction of the Water Layer Identification Model and Performance Evaluation
2.4.1. Model Construction
2.4.2. Model Performance Evaluation
3. Results and Discussion
3.1. Analysis of Temperature Features
3.2. Analysis of Color Features
3.3. Comparative Analysis of Rice Paddy Water Layer Identification Models
3.3.1. Water Layer Identification Model Based on KNN
3.3.2. Water Layer Identification Model Based on SVM
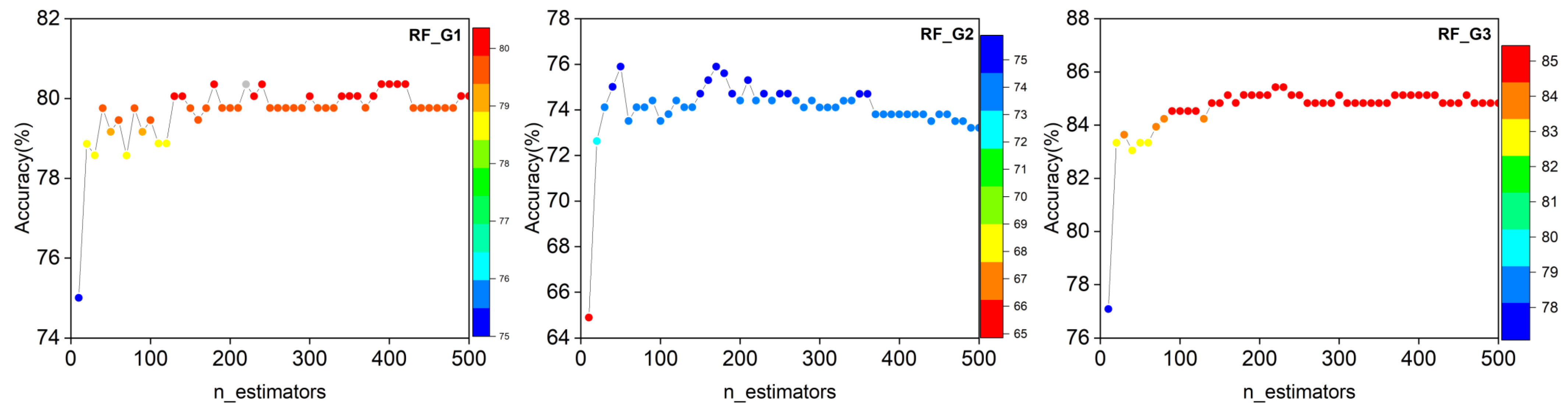
3.3.3. Water Layer Identification Model Based on RF
3.3.4. Water Layer Identification Model Based on LR
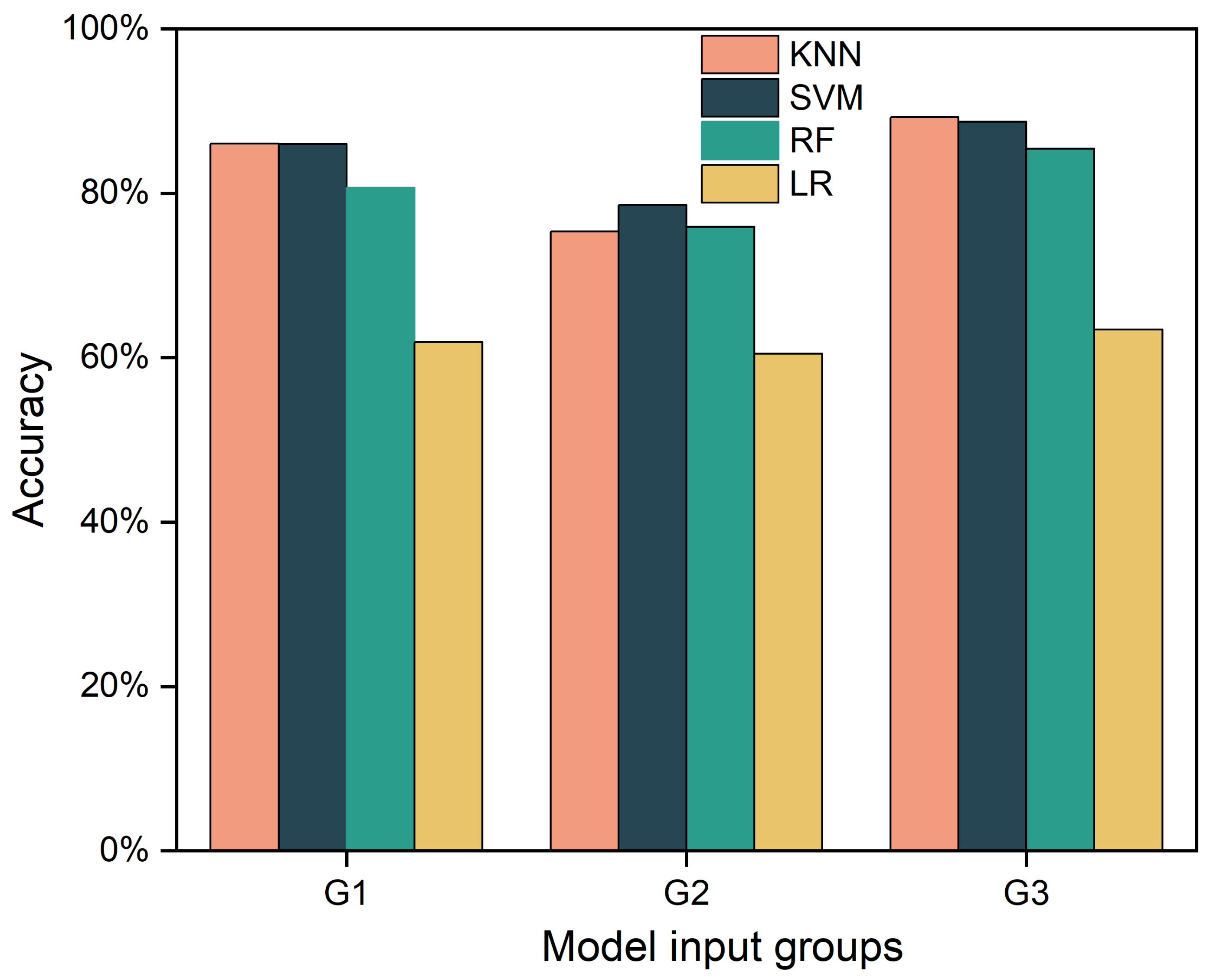
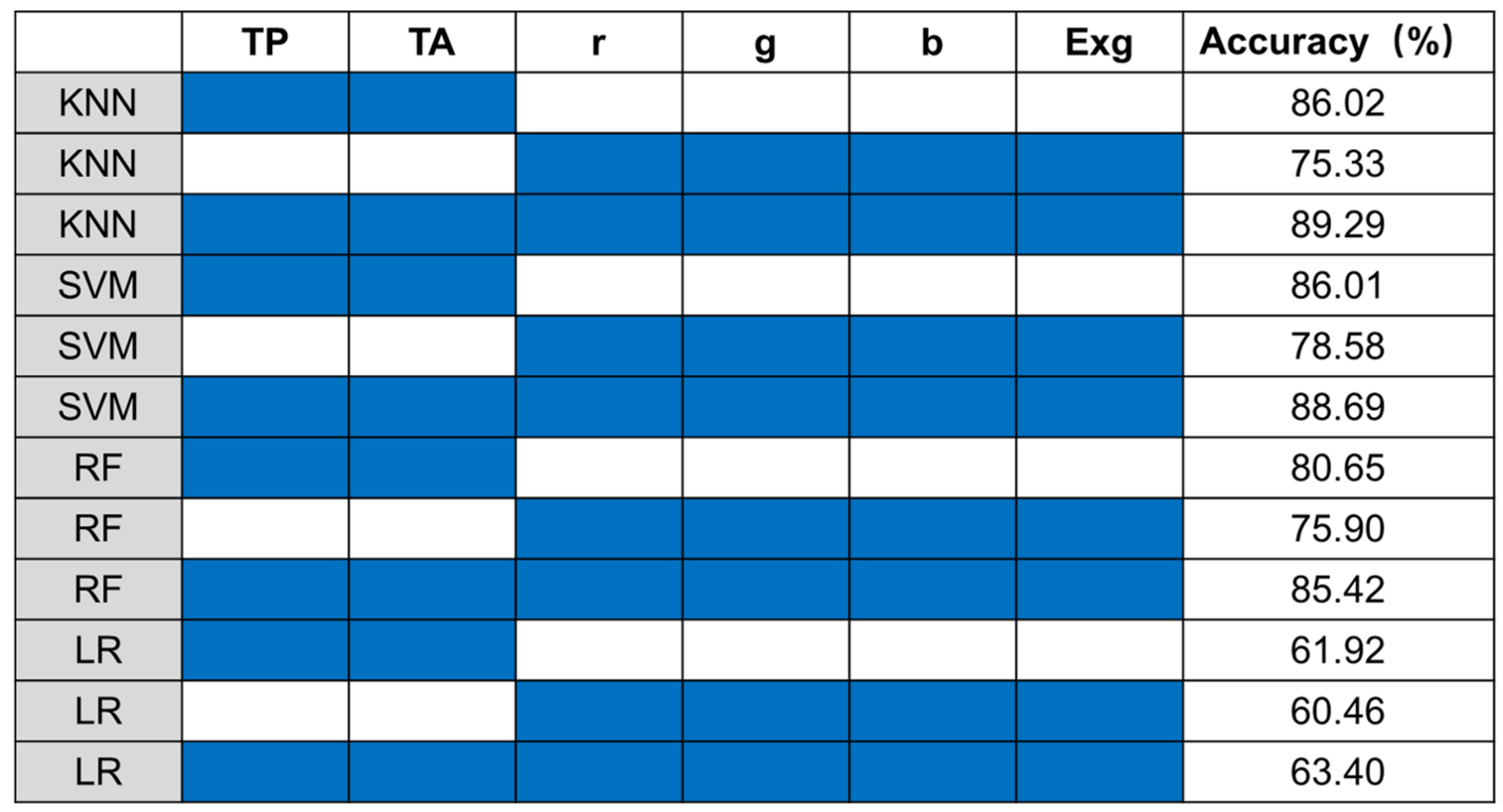
3.4. Evaluation of Model Algorithms and Analysis of Optimal Combination of Input Variables
3.5. Limitations, Uncertainties, and Perspective
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Luo, W.; Chen, M.; Kang, Y.; Li, W.; Li, D.; Cui, Y.; Khan, S.; Luo, Y. Analysis of crop water requirements and irrigation demands for rice: Implications for increasing effective rainfall. Agric. Water Manag. 2022, 260, 107285. [Google Scholar] [CrossRef]
- Mote, K.; Rao, V.; Ramulu, V.; Kumar, K.; Devi, M. Performance of rice (Oryza sativa (L.)) under AWD irrigation practice—A brief review. Paddy Water Environ. 2021, 20, 1–21. [Google Scholar] [CrossRef]
- Cheng, M.; Li, B.; Jiao, X.; Huang, X.; Fan, H.; Lin, R.; Liu, K. Using multimodal remote sensing data to estimate regional-scale soil moisture content: A case study of Beijing, China. Agric. Water Manag. 2022, 260, 107298. [Google Scholar] [CrossRef]
- Adab, H.; Morbidelli, R.; Saltalippi, C.; Moradian, M.; Ghalhari, G.A.F. Machine Learning to Estimate Surface Soil Moisture from Remote Sensing Data. Water 2020, 12, 3223. [Google Scholar] [CrossRef]
- Periasamy, S.; Shanmugam, R.S. Multispectral and Microwave Remote Sensing Models to Survey Soil Moisture and Salinity. Land Degrad. Dev. 2016, 28, 1412–1425. [Google Scholar] [CrossRef]
- Cao, Z.; Gao, H.; Nan, Z.; Zhao, Y.; Yin, Z. A Semi-Physical Approach for Downscaling Satellite Soil Moisture Data in a Typical Cold Alpine Area, Northwest China. Remote Sens. 2021, 13, 509. [Google Scholar] [CrossRef]
- Senanayake, I.P.; Yeo, I.Y.; Tangdamrongsub, N.; Willgoose, G.R.; Hancock, G.R.; Wells, T.; Fang, B.; Lakshmi, V.; Walker, J.P. An in-situ data based model to downscale radiometric satellite soil moisture products in the Upper Hunter Region of NSW, Australia. J. Hydrol. 2019, 572, 820–838. [Google Scholar] [CrossRef]
- Shima, A.; Alireza, B.D.; Sara, M.; Bernhard, B.; Rajat, B.; Wolfgang, W.; Christian, M. Assimilation of Sentinel 1 and SMAP—based satellite soil moisture retrievals into SWAT hydrological model: The impact of satellite revisit time and product spatial resolution on flood simulations in small basins. J. Hydrol. 2020, 581, 124367. [Google Scholar]
- Punalekar, S.M.; Verhoef, A.; Quaife, T.L.; Humphries, D.; Bermingham, L.; Reynolds, C.K. Application of Sentinel-2A data for pasture biomass monitoring using a physically based radiative transfer model. Remote Sens. Environ. 2018, 218, 207–220. [Google Scholar] [CrossRef]
- Jia, K.; Liang, S.; Gu, X.; Baret, F.; Wei, X.; Wang, X.; Yao, Y.; Yang, L.; Li, Y. Fractional vegetation cover estimation algorithm for Chinese GF-1 wide field view data. Remote Sens. Environ. 2016, 177, 184–191. [Google Scholar] [CrossRef]
- Wei, G.; Cao, J.; Xie, H.; Xie, H.; Yang, Y.; Wu, C.; Cui, Y.; Luo, Y. Spatial-Temporal Variation in Paddy Evapotranspiration in Subtropical Climate Regions Based on the SEBAL Model: A Case Study of the Ganfu Plain Irrigation System, Southern China. Remote Sens. 2022, 14, 1201. [Google Scholar] [CrossRef]
- Kordi, F.; Yousefi, H. Crop classification based on phenology information by using time series of optical and synthetic-aperture radar images. Remote Sens. Appl. Soc. Environ. 2022, 27, 100812. [Google Scholar] [CrossRef]
- Woźniak, E.; Rybicki, M.; Kofman, W.; Aleksandrowicz, S.; Wojtkowski, C.; Lewiński, S.; Bojanowski, J.; Musiał, J.; Milewski, T.; Slesiński, P.; et al. Multi-temporal phenological indices derived from time series Sentinel-1 images to country-wide crop classification. Int. J. Appl. Earth Obs. 2022, 107, 102683. [Google Scholar] [CrossRef]
- Wei, G.; Li, Y.; Zhang, Z.; Chen, Y.; Chen, J.; Yao, Z.; Lao, C.; Chen, H. Estimation of soil salt content by combining UAV-borne multispectral sensor and machine learning algorithms. PeerJ 2020, 8, e9087. [Google Scholar] [CrossRef]
- Zhang, Z.; Wei, G.; Yao, Z.; Tan, C.; Wang, X.; Han, J. Research on soil salt inversion model based on UAV multispectral remote sensing. Trans. Chin. Soc. Agric. Mach. 2019, 50, 151–160. [Google Scholar]
- Lobell, D.B.; Asner, G.P. Moisture Effects on Soil Reflectance. Soil Sci. Soc. Am. J. 2002, 66, 722–727. [Google Scholar] [CrossRef]
- Riveros-Burgos, C.; Ortega-Farías, S.; Morales-Salinas, L.; Fuentes-Peñailillo, F.; Tian, F. Assessment of the clumped model to estimate olive orchard evapotranspiration using meteorological data and UAV-based thermal infrared imagery. Irrig. Sci. 2021, 39, 63–80. [Google Scholar] [CrossRef]
- Shao, G.; Han, W.; Zhang, H.; Liu, S.; Wang, Y.; Zhang, L.; Cui, X. Mapping maize crop coefficient Kc using random forest algorithm based on leaf area index and UAV-based multispectral vegetation indices. Agric. Water Manag. 2021, 252, 106906. [Google Scholar] [CrossRef]
- Fan, C.; Lu, R. UAV image crop classification based on deep learning with spatial and spectral features. IOP Conf. Ser. Earth Environ. Sci. 2021, 783, 012080. [Google Scholar] [CrossRef]
- Ge, X.; Ding, J.; Jin, X.; Wang, J.; Chen, X.; Li, X.; Liu, J.; Xie, B. Estimating Agricultural Soil Moisture Content through UAV-Based Hyperspectral Images in the Arid Region. Remote Sens. 2021, 13, 1562. [Google Scholar] [CrossRef]
- Easterday, K.; Kislik, C.; Dawson, T.; Hogan, S.; Kelly, M. Remotely Sensed Water Limitation in Vegetation: Insights from an Experiment with Unmanned Aerial Vehicles (UAVs). Remote Sens. 2019, 11, 1853. [Google Scholar] [CrossRef] [Green Version]
- Hoffmann, H.; Jensen, R.; Thomsen, A.; Nieto, H.; Rasmussen, J.; Friborg, T. Crop water stress maps for an entire growing season from visible and thermal UAV imagery. Biogeosciences 2016, 13, 6545–6563. [Google Scholar] [CrossRef] [Green Version]
- Kendall, C.D.; Saleh, T.; Thomas, J.T.; Louise, H.C. Comparison of canopy temperature-based water stress indices for maize. Agr. Water Manag. 2015, 156. [Google Scholar]
- Xu, J.; Lv, Y.; Liu, X.; Dalson, T.; Yang, S.; Wu, J. Diagnosing Crop Water Stress of Rice using Infra-red Thermal Imager under Water Deficit Condition. Int. J. Agric. Biol. 2016, 18, 565–572. [Google Scholar] [CrossRef]
- Peng, S.; Xu, J.; Ding, J.; Li, D. Leaf-air temperature diffierence of rice and water deficit diagnose under water saving irrigation. J.Hudraul. Eng. 2006, 15, 1503–1508. [Google Scholar]
- Bian, J.; Zhang, Z.; Chen, J.; Chen, H.; Cui, C.; Li, X.; Chen, S.; Fu, Q. Simplified Evaluation of Cotton Water Stress Using High Resolution Unmanned Aerial Vehicle Thermal Imagery. Remote Sens. 2019, 11, 267. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Tan, C.; Xu, C.; Chen, S.; Han, W.; Li, Y. Retrieving soil moisture content in field maize root zone based on UAV multispectral remote sensing. Trans. Chin. Soc. Agric. Mach. 2019, 50, 246–257. [Google Scholar]
- Tang, G.; Jiang, S. Drought index and drought prediction for rice. Water Resour. Hydropower Eng. 2011, 42, 54–58. [Google Scholar]
- Thamaraichelvi, B.; Yamuna, G. Gaussian kernel-based FCM segmentation of brain MRI with BPNN classification. Int. J. Biomed. Eng. Technol. 2016, 20, 116–131. [Google Scholar] [CrossRef]
- Ji, X. Application of Improved SVM Image Segmentation Algorithm in Computer Tomography Image Analysis. Int. J. Bioautomation 2017, 21, 59–68. [Google Scholar]
- Shah, S.H.; Angel, Y.; Houborg, R.; Ali, S.; McCabe, M.F. A Random Forest Machine Learning Approach for the Retrieval of Leaf Chlorophyll Content in Wheat. Remote Sens. 2019, 11, 920. [Google Scholar] [CrossRef] [Green Version]
- Patil, S.; Sasikala, M. Segmentation and identification of medicinal plant through weighted KNN. Multimed. Tools Appl. 2022, 82, 2805–2819. [Google Scholar] [CrossRef]
- Thamizhvani, T.R.; Ajayan, A.K.; Sannidhya, V.; Hemalatha, R.J.; Chandrasekaran, R. Psoriasis Skin Disease Identification Using Support Vector Machine (SVM) Image Classification and Determining the Growth Rate. J. Phys. Conf. Ser. 2022, 2318, 012034. [Google Scholar] [CrossRef]
- Liu, B.; Hou, J.; Ge, H.; Liu, M.; Shi, L.; Li, C.; Cui, Y. Comparison of Evapotranspiration Partitioning and Dual Crop Coefficients of Direct-Seeded and Transplanted Rice in the Poyang Lake Basin, China. Agronomy 2023, 13, 1218. [Google Scholar] [CrossRef]
- Liu, T.; Zhong, X.; Jiang, M.; Jin, X.; Zhou, P.; Liu, S.; Sun, C.; Guo, W. Estimates of rice lodging using indices derived from UAV visible and thermal. Agric. Forest Meteorol. 2018, 252, 144–154. [Google Scholar] [CrossRef]
- Zhang, L. Monitoring Maize Water Stress Based on UAV Remote Sensing Data. Doctor’s Thesis, Northwest A&F University, Xianyang, China, 2021. [Google Scholar]
- Kherif, O.; Benmahamed, Y.; Teguar, M.; Boubakeur, A.; Ghoneim, S.S.M. Accuracy Improvement of Power Transformer Faults Diagnostic Using KNN Classifier with Decision Tree Principle. IEEE Access 2021, 9, 81693–81701. [Google Scholar] [CrossRef]
- Gao, H.; Wang, C.; Wang, G.; Fu, H.; Zhu, J. A novel crop classification method based on ppfSVM classifier with time-series alignment kernel from dual-polarization SAR datasets. Remote Sens. Environ. 2021, 264, 112628. [Google Scholar] [CrossRef]
- Zhu, N.; Zhu, C.; Zhou, L.; Zhu, Y.; Zhang, X. Optimization of the Random Forest Hyperparameters for Power Industrial Control Systems Intrusion Detection Using an Improved Grid Search Algorithm. Appl. Sci. 2022, 12, 10456. [Google Scholar] [CrossRef]
- Gianluca, T.; Kazuito, I.; Gustau, C.; Enrico, T.; Dario, P. Uncertainty analysis of gross primary production upscaling using Random Forests, remote sensing and eddy covariance data. Remote Sens. Environ. 2015, 168, 360–373. [Google Scholar]
- Islam, M.S.; Sultana, S.; Farid, F.A.; Islam, M.N.; Rashid, M.; Bari, B.S.; Hashim, N.; Husen, M.N. Multimodal Hybrid Deep Learning Approach to Detect Tomato Leaf Disease Using Attention Based Dilated Convolution Feature Extractor with Logistic Regression Classification. Sensors 2022, 22, 6079. [Google Scholar] [CrossRef]
- Melo, L.L.D.; Melo, V.G.M.L.; Marques, P.A.A.; Frizzone, J.A.; Coelho, R.D.; Romero, R.A.F.; Barros, T.H.D.S. Deep learning for identification of water deficits in sugarcane based on thermal images. Agric. Water Manag. 2022, 272, 107820. [Google Scholar] [CrossRef]
- Jacques, S. Statistical inference in retrieval effectiveness evaluation. Inform. Process. Manag. 1997, 33, 495–512. [Google Scholar]
- Luan, Y.; Xu, J.; Lv, Y.; Liu, X.; Wang, H.; Liu, S. Improving the performance in crop water deficit diagnosis with canopy temperature spatial distribution information measured by thermal imaging. Agric. Water Manag. 2021, 246, 106699. [Google Scholar] [CrossRef]
- Tang, Q. Canopy Eco-Physiological Properties and the Influence Factors in Irrigated Rice. Ph.D. Thesis, Hunan Agriclutral University, Changsha, China, 2005. [Google Scholar]
- Jia, L.; Buerkert, A.; Chen, X.; Roemheld, V.; Zhang, F. Low-altitude aerial photography for optimum N fertilization of winter wheat on the North China Plain. Field Crop. Res. 2004, 89, 389–395. [Google Scholar] [CrossRef]
- He, J.; Ma, B.; Tian, J. Water production function and optimal irrigation schedule for rice (Oryza sativa L.) cultivation with drip irrigation under plastic film-mulched. Sci. Rep. 2022, 12, 17243. [Google Scholar] [CrossRef] [PubMed]
- Jiang, M.; Guo, K.; Wang, J.; Wu, Y.; Shen, X.; Huang, L. Current status and prospects of rice canopy temperature research. Food Energy Secur. 2023, 12, e424. [Google Scholar] [CrossRef]
- Ren, H.; Zhuang, D.; Pan, J.; Shi, X.; Wang, H. Hyper-spectral remote sensing to monitor vegetation stress. J. Soil. Sediment. 2008, 8, 323–326. [Google Scholar] [CrossRef] [Green Version]
- Dudani, S.A. The Distance-Weighted k-Nearest-Neighbor Rule. IEEE Trans. Syst. Man Cybern. 1976, 4, 325–327. [Google Scholar] [CrossRef]
- Jinzhu, L.; Reza, E.; Yeyin, S.; Jaafar, A.; Ana, I.D.C.; Yunjun, X. Field detection of anthracnose crown rot in strawberry using spectroscopy technology. Comput. Electron. Agric. 2017, 135, 289–299. [Google Scholar]
- Saleem, G.; Akhtar, M.; Ahmed, N.; Qureshi, W.S. Automated analysis of visual leaf shape features for plant classification. Comput. Electron. Agric. 2019, 157, 270–280. [Google Scholar] [CrossRef]
- Tan, C.; Zhang, Z.; Xu, C.; Ma, Y.; Yao, Z.; Wei, G.; Li, Y. Soil water content inversion in field maize root zone based on UAV multispectral remote sensing. Trans. Chin. Soc. Agric. Eng. 2020, 36, 63–74. [Google Scholar]
- Chen, Y.; Ge, Y.; Heuvelink, G.B.M.; An, R.; Chen, Y. Object-Based Superresolution Land-Cover Mapping from Remotely Sensed Imagery. IEEE Trans. Geosci. Remote. Sens. 2018, 56, 328–340. [Google Scholar] [CrossRef]
- Yu, J.; Zhang, X.; Xu, L.; Dong, J.; Zhangzhong, L. A hybrid CNN-GRU model for predicting soil moisture in maize root zone. Agric. Water Manag. 2021, 245, 106649. [Google Scholar] [CrossRef]
- Corbari, C.; Salerno, R.; Ceppi, A.; Telesca, V.; Mancini, M. Smart irrigation forecast using satellite LANDSAT data and meteo-hydrological modeling. Agric. Water Manag. 2019, 212, 283–294. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Thermal Image | Visible Image |
|---|---|---|
| Pixel | 336 × 256 | 4000 × 3000 |
| Format | R-JPEG | JPEG |
| Width/height (nm) | 5.7/4.4 | 7.4/5.6 |
| Focal length(nm) | 13 | 8 |
| Wavelength (μm) | 7.5~13.5 | 0.49, 0.55, 0.67 |
| Machine-Learning Algorithms | Tuning Parameters |
|---|---|
| KNN | K |
| SVM | C, gamma |
| RF | n_estimators |
| LR | Default |
| Variable Group | Input Variable |
|---|---|
| G1 | Tp, Ta |
| G2 | , ExG |
| G3 | Tp, Ta, , ExG |
| Prediction | |||||||
|---|---|---|---|---|---|---|---|
| No Water Layer | With Water Layer | Precision | Recall | Accuracy | |||
| Actual | KNN | No water layer | 129 | 10 | 0.8323 | 0.9281 | 0.8929 |
| With water layer | 26 | 171 | 0.9448 | 0.8680 | |||
| SVM | No water layer | 126 | 13 | 0.8344 | 0.9065 | 0.8869 | |
| With water layer | 25 | 172 | 0.9297 | 0.8731 | |||
| RF | No water layer | 121 | 18 | 0.7961 | 0.8705 | 0.8542 | |
| With water layer | 31 | 166 | 0.9022 | 0.8424 | |||
| LR | No water layer | 91 | 48 | 0.5482 | 0.6547 | 0.6340 | |
| With water layer | 75 | 122 | 0.7177 | 0.6193 | |||
| Method | f_Score | |
|---|---|---|
| No Water Layer | With Water Layer | |
| KNN | 0.8776 | 0.9048 |
| SVM | 0.8561 | 0.9069 |
| RF | 0.8181 | 0.8824 |
| LR | 0.5494 | 0.6917 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, G.; Chen, H.; Lin, E.; Hu, X.; Xie, H.; Cui, Y.; Luo, Y. Identification of Water Layer Presence in Paddy Fields Using UAV-Based Visible and Thermal Infrared Imagery. Agronomy 2023, 13, 1932. https://doi.org/10.3390/agronomy13071932
Wei G, Chen H, Lin E, Hu X, Xie H, Cui Y, Luo Y. Identification of Water Layer Presence in Paddy Fields Using UAV-Based Visible and Thermal Infrared Imagery. Agronomy. 2023; 13(7):1932. https://doi.org/10.3390/agronomy13071932
Chicago/Turabian StyleWei, Guangfei, Huifang Chen, En Lin, Xuhua Hu, Hengwang Xie, Yuanlai Cui, and Yufeng Luo. 2023. "Identification of Water Layer Presence in Paddy Fields Using UAV-Based Visible and Thermal Infrared Imagery" Agronomy 13, no. 7: 1932. https://doi.org/10.3390/agronomy13071932