

Mobile Robot System for Selective Asparagus Harvesting

Abstract
:1. Introduction
2. Materials and Methods
2.1. Hardware Design
2.1.1. Delta Robot
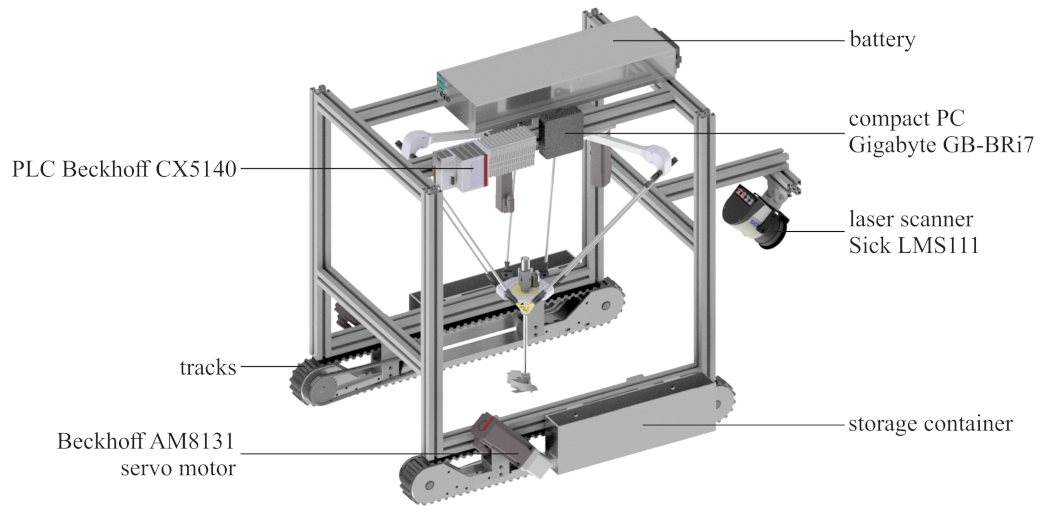
2.1.2. Mobile Platform
2.2. Control
2.2.1. Low-Level Control
- Communication
- Mobile platform kinematics
- Delta robot joint control
2.2.2. High-Level Control
- Beckhoff communication: the C++ package acted as a central node, facilitating ADS communication between the Beckhoff controller and the ROS computer;
- mobile platform: the package enabled the movement of the mobile platform, using tracks, and included a program for manual control;
- delta robot: the package controlled the parallel robot, providing functions for proportional–derivative control, manual operation, and trajectory planning;
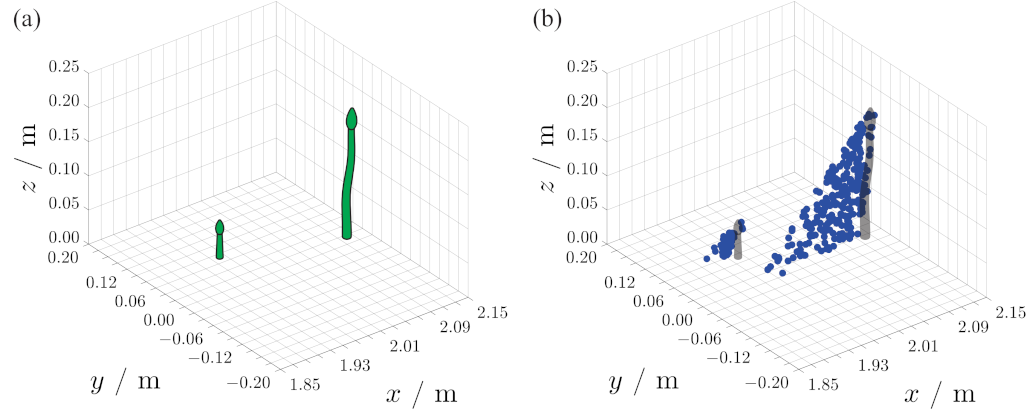
- acquire asparagus: the package handled the detection of asparagus locations, using sensors; it included programs for reading and converting data from a laser scanner, generating point clouds, and extracting asparagus from them.
- Delta robot kinematics
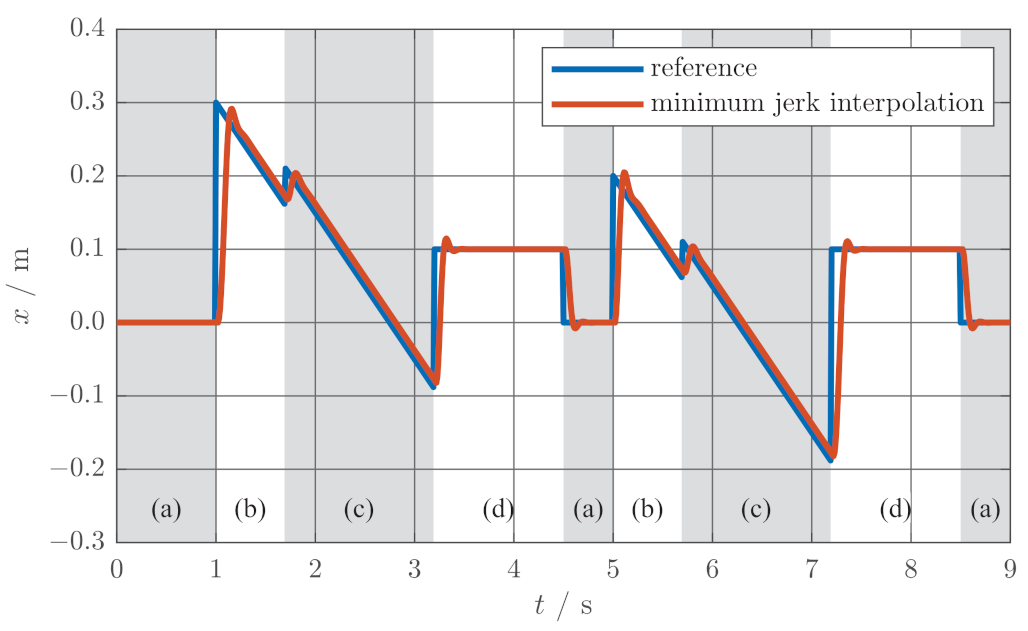
- Trajectory planning
- Manual control
2.3. Asparagus Spears Detection
2.4. Harvesting Procedure
3. Testing of Asparagus Harvesting
3.1. Laboratory Testing
3.2. Field Testing
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| CNN | convolutional neural network |
| FRCNN | faster, region-based convolutional neural network |
| SSD | single shot detection |
| RCNN | region-based convolutional neural network |
| TCP | tool center point |
| ADS | automation device specification |
| ROS | Robot Operating System |
| RGBD | red–green–blue–depth |
| GPS | Global Positioning System |
| RTK GPS | real-time kinematics GPS |
References
- Marinoudi, V.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Robotics and labour in agriculture. A context consideration. Biosyst. Eng. 2019, 184, 111–121. [Google Scholar] [CrossRef]
- Kushwaha, H.; Sinha, J.; Khura, T.; Kushwaha, D.K.; Ekka, U.; Purushottam, M.; Singh, N. Status and scope of robotics in agriculture. In Proceedings of the International Conference on Emerging Technologies in Agricultural and Food Engineering, Kharagpur, India, 27–30 December 2016; Volume 12, p. 163. [Google Scholar]
- Mahmud, M.S.A.; Abidin, M.S.Z.; Emmanuel, A.A.; Hasan, H.S. Robotics and automation in agriculture: Present and future applications. Appl. Model. Simul. 2020, 4, 130–140. [Google Scholar]
- Lytridis, C.; Kaburlasos, V.G.; Pachidis, T.; Manios, M.; Vrochidou, E.; Kalampokas, T.; Chatzistamatis, S. An overview of cooperative robotics in agriculture. Agronomy 2021, 11, 1818. [Google Scholar] [CrossRef]
- Bergerman, M.; Billingsley, J.; Reid, J.; van Henten, E. Robotics in agriculture and forestry. Springer Handbook of Robotics; Springer: Cham, Switzerland, 2016; pp. 1463–1492. [Google Scholar]
- Lowenberg-DeBoer, J.; Huang, I.Y.; Grigoriadis, V.; Blackmore, S. Economics of robots and automation in field crop production. Precis. Agric. 2020, 21, 278–299. [Google Scholar] [CrossRef] [Green Version]
- Avgoustaki, D.D.; Avgoustakis, I.; Miralles, C.C.; Sohn, J.; Xydis, G. Autonomous Mobile Robot with Attached Multispectral Camera to Monitor the Development of Crops and Detect Nutrient and Water Deficiencies in Vertical Farms. Agronomy 2022, 12, 2691. [Google Scholar] [CrossRef]
- Zhang, W.; Miao, Z.; Li, N.; He, C.; Sun, T. Review of Current Robotic Approaches for Precision Weed Management. Curr. Robot. Rep. 2022, 3, 139–151. [Google Scholar] [CrossRef]
- Morara, G.; Baldassarri, A.; Diepenbruck, J.; Bruckmann, T.; Carricato, M. Design of a Weed-Control Mobile Robot Based on Electric Shock. In Proceedings of the Symposium on Robot Design, Dynamics and Control, Udine, Italy, 4–7 July 2022; pp. 220–227. [Google Scholar]
- Iida, M.; Harada, S.; Sasaki, R.; Zhang, Y.; Asada, R.; Suguri, M.; Masuda, R. Multi-combine robot system for rice harvesting operation. In Proceedings of the 2017 ASABE Annual International Meeting, Spokane, WA, USA, 16–19 July 2017; p. 1. [Google Scholar]
- Rong, J.; Fu, J.; Zhang, Z.; Yin, J.; Tan, Y.; Yuan, T.; Wang, P. Development and Evaluation of a Watermelon-Harvesting Robot Prototype: Vision System and End-Effector. Agronomy 2022, 12, 2836. [Google Scholar] [CrossRef]
- Roldán, J.J.; del Cerro, J.; Garzón-Ramos, D.; Garcia-Aunon, P.; Garzón, M.; De León, J.; Barrientos, A. Robots in agriculture: State of art and practical experiences. In Service Robots; IntechOpen: Rijeka, Croatia, 2018; pp. 67–90. [Google Scholar]
- Kitić, G.; Krklješ, D.; Panić, M.; Petes, C.; Birgermajer, S.; Crnojević, V. Agrobot Lala—An Autonomous Robotic System for Real-Time, In-Field Soil Sampling, and Analysis of Nitrates. Sensors 2022, 22, 4207. [Google Scholar] [CrossRef]
- Blender, T.; Buchner, T.; Fernandez, B.; Pichlmaier, B.; Schlegel, C. Managing a mobile agricultural robot swarm for a seeding task. In Proceedings of the IECON 2016-42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 23–26 October 2016; pp. 6879–6886. [Google Scholar]
- Hallik, L.; Šarauskis, E.; Kazlauskas, M.; Bručienė, I.; Mozgeris, G.; Steponavičius, D.; Tõrra, T. Proximal Sensing Sensors for Monitoring Crop Growth. In Information and Communication Technologies for Agriculture—Theme I: Sensors; Springer: Cham, Switzerland, 2022; pp. 43–97. [Google Scholar]
- Cruz Ulloa, C.; Krus, A.; Barrientos, A.; Del Cerro, J.; Valero, C. Robotic fertilisation using localisation systems based on point clouds in strip-cropping fields. Agronomy 2020, 11, 11. [Google Scholar] [CrossRef]
- Hassan, A.; Abdullah, H.M.; Farooq, U.; Shahzad, A.; Asif, R.M.; Haider, F.; Rehman, A.U. A wirelessly controlled robot-based smart irrigation system by exploiting arduino. J. Robot. Control (JRC) 2021, 2, 29–34. [Google Scholar] [CrossRef]
- Tourrette, T.; Deremetz, M.; Naud, O.; Lenain, R.; Laneurit, J.; De Rudnicki, V. Close coordination of mobile robots using radio beacons: A new concept aimed at smart spraying in agriculture. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 7727–7734. [Google Scholar]
- Conesa-Muñoz, J.; Bengochea-Guevara, J.M.; Andujar, D.; Ribeiro, A. Route planning for agricultural tasks: A general approach for fleets of autonomous vehicles in site-specific herbicide applications. Comput. Electron. Agric. 2016, 127, 204–220. [Google Scholar] [CrossRef]
- Kootstra, G.; Wang, X.; Blok, P.M.; Hemming, J.; Van Henten, E. Selective harvesting robotics: Current research, trends, and future directions. Curr. Robot. Rep. 2021, 2, 95–104. [Google Scholar] [CrossRef]
- Peebles, M.; Lim, S.H.; Duke, M.; Au, C.K. Overview of sensor technologies used for 3D localization of asparagus spears for robotic harvesting. Appl. Mech. Mater. 2018, 884, 77–85. [Google Scholar] [CrossRef]
- Peebles, M.; Barnett, J.; Duke, M.; Lim, S.H. Robotic Harvesting of Asparagus using Machine Learning and Time-of-Flight Imaging–Overview of Development and Field Trials. In Proceedings of the 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE), Hong Kong, 20–21 August 2020; pp. 1361–1366. [Google Scholar]
- Irie, N.; Taguchi, N.; Horie, T.; Ishimatsu, T. Asparagus harvesting robot coordinated with 3-D vision sensor. In Proceedings of the 2009 IEEE International Conference on Industrial Technology, Churchill, VIC, Australia, 10–13 February 2009; pp. 1–6. [Google Scholar]
- Irie, N.; Taguchi, N. Asparagus harvesting robot. J. Robot. Mechatron. 2014, 26, 267–268. [Google Scholar] [CrossRef]
- Funami, Y.; Kawakura, S.; Tadano, K. Development of a Robotic Arm for Automated Harvesting of Asparagus. Eur. J. Agric. Food Sci. 2020, 2, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Zhang, R.; Zhu, L.; Yang, S.; Yao, H. Design of self-propelled asparagus mechanized harvesting device. J. Phys. Conf. Ser. 2020, 1601, 062003. [Google Scholar] [CrossRef]
- Zichen, H.; Saki, S. Research Progress and Enlightenment of Japanese Harvesting Robot in Facility Agriculture. Smart Agric. 2022, 4, 135. [Google Scholar]
- Leu, A.; Razavi, M.; Langstädtler, L.; Ristić-Durrant, D.; Raffel, H.; Schenck, C.; Gräser, A.; Kuhfuss, B. Robotic green asparagus selective harvesting. IEEE/ASME Trans. Mechatron. 2017, 22, 2401–2410. [Google Scholar] [CrossRef]
- Peebles, M.; Lim, S.; Duke, M.; McGuinness, B. Investigation of optimal network architecture for asparagus spear detection in robotic harvesting. IFAC-PapersOnLine 2019, 52, 283–287. [Google Scholar] [CrossRef]
- Kennedy, G.; Ila, V.; Mahony, R. A perception pipeline for robotic harvesting of green asparagus. IFAC-PapersOnLine 2019, 52, 288–293. [Google Scholar] [CrossRef]
- Sakai, H.; Shiigi, T.; Kondo, N.; Ogawa, Y.; Taguchi, N. Accurate position detecting during asparagus spear harvesting using a laser sensor. Eng. Agric. Environ. Food 2013, 6, 105–110. [Google Scholar] [CrossRef]
- Hong, W.; Ma, Z.; Ye, B.; Yu, G.; Tang, T.; Zheng, M. Detection of Green Asparagus in Complex Environments Based on the Improved YOLOv5 Algorithm. Sensors 2023, 23, 1562. [Google Scholar] [CrossRef]
- Liu, X.; Wang, D.; Li, Y.; Guan, X.; Qin, C. Detection of Green Asparagus Using Improved Mask R-CNN for Automatic Harvesting. Sensors 2022, 22, 9270. [Google Scholar] [CrossRef]
- Mihelj, M.; Bajd, T.; Ude, A.; Lenarčič, J.; Stanovnik, A.; Munih, M.; Rejc, J.; Šlajpah, S. Robotics; Springer: Cham, Switzerland, 2019. [Google Scholar]
- Zsombor-Murray, P. Descriptive Geometric Kinematic Analysis of Clavel’s “Delta” Robot; Centre of Intelligent Machines, McGill University: Montreal, QC, Canada, 2004; Volume 1. [Google Scholar]
- Piazzi, A.; Visioli, A. Global minimum-jerk trajectory planning of robot manipulators. IEEE Trans. Ind. Electron. 2000, 47, 140–149. [Google Scholar] [CrossRef] [Green Version]
- Martelloni, L.; Fontanelli, M.; Frasconi, C.; Raffaelli, M.; Pirchio, M.; Peruzzi, A. A combined flamer-cultivator for weed control during the harvesting season of asparagus green spears. Span. J. Agric. Res. 2017, 15, e0203. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Spears Ready to Harvest | Total Length/m | Total Time/s | |||||
|---|---|---|---|---|---|---|---|
| Total | Rec. a | Unrec. b | Harvested | Missed | |||
| laboratory | 100 | 94 (94%) | 6 (6%) | 88 (88%) | 6 (6%) | 25 | 423 |
| outdoor field | 43 | 39 (91%) | 4 (9%) | 33 (77%) | 6 (14%) | 25 | 437 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Šlajpah, S.; Munih, M.; Mihelj, M. Mobile Robot System for Selective Asparagus Harvesting. Agronomy 2023, 13, 1766. https://doi.org/10.3390/agronomy13071766
Šlajpah S, Munih M, Mihelj M. Mobile Robot System for Selective Asparagus Harvesting. Agronomy. 2023; 13(7):1766. https://doi.org/10.3390/agronomy13071766
Chicago/Turabian StyleŠlajpah, Sebastjan, Marko Munih, and Matjaž Mihelj. 2023. "Mobile Robot System for Selective Asparagus Harvesting" Agronomy 13, no. 7: 1766. https://doi.org/10.3390/agronomy13071766