
Continuous Mowing for Erigeron canadensis L. Control in Vineyards
 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Experimental Design
2.2. Assessments
2.3. Statistical Analysis
3. Results
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Buhler, D.D.; Owen, M.D.K. Emergence and Survival of Horseweed (Conyza canadensis). Weed Sci. 1997, 45, 98–101. [Google Scholar] [CrossRef]
- Sansom, M.; Saborido, A.A.; Dubois, M. Control of Conyza Spp. with Glyphosate—A Review of the Situation in Europe. Plant Prot. Sci. 2013, 49, 44–53. [Google Scholar] [CrossRef] [Green Version]
- Schramski, J.A.; Sprague, C.L.; Patterson, E.L. Environmental Cues Affecting Horseweed (Conyza canadensis) Growth Types and Their Sensitivity to Glyphosate. Weed Sci. 2021, 69, 412–421. [Google Scholar] [CrossRef]
- Smisek, A.; Doucet, C.; Jones, M.; Weaver, S. Paraquat Resistance in Horseweed (Conyza canadensis) and Virginia Pepperweed (Lepidium virginicum) from Essex County, Ontario. Weed Sci. 1998, 46, 200–204. [Google Scholar] [CrossRef]
- Lehoczki, E.; Laskay, G.; Pölös, E.; Mikulás, J. Resistance to Triazine Herbicides in Horseweed (Conyza canadensis). Weed Sci. 1984, 32, 669–674. [Google Scholar] [CrossRef]
- Brown, S.M.; Whitwell, T. Influence of Tillage on Horseweed, Conyza canadensis. Weed Technol. 1988, 2, 269–270. [Google Scholar] [CrossRef]
- Nandula, V.K.; Eubank, T.W.; Poston, D.H.; Koger, C.H.; Reddy, K.N. Factors Affecting Germination of Horseweed (Conyza canadensis). Weed Sci. 2006, 54, 898–902. [Google Scholar] [CrossRef]
- Alcorta, M.; Fidelibus, M.W.; Steenwerth, K.L.; Shrestha, A. Competitive Effects of Glyphosate-Resistant and Glyphosate-Susceptible Horseweed (Conyza canadensis) on Young Grapevines (Vitis vinifera). Weed Sci. 2011, 59, 489–494. [Google Scholar] [CrossRef]
- Alcorta, M.; Fidelibus, M.W.; Steenwerth, K.L.; Shrestha, A. Effect of Vineyard Row Orientation on Growth and Phenology of Glyphosate-Resistant and Glyphosate-Susceptible Horseweed (Conyza canadensis). Weed Sci. 2011, 59, 55–60. [Google Scholar] [CrossRef]
- Shrestha, A.; Hembree, K.; Wright, S. Biology and Management of Horseweed and Hairy Fleabane in California; University of California: Oakland, CA, USA, 2008; pp. 1–9. [Google Scholar] [CrossRef] [Green Version]
- Holm, L.G.; Plucknett, D.L.; Pancho, J.V.; Herberger, J.P. The World’s Worst Weeds: Distribution and Biology; University Press of Hawaii: Honolulu, HI, USA, 1977. [Google Scholar]
- Travlos, I.S.; Bilalis, D.J.; Katsenios, N.; De Prado, R. Sustainable Weed Control in Vineyards. In Weed Control; CRC Press: Boca Raton, FL, USA, 2018; pp. 526–542. [Google Scholar]
- Guerra, J.G.; Cabello, F.; Fernández-Quintanilla, C.; Peña, J.M.; Dorado, J. How Weed Management Influence Plant Community Composition, Taxonomic Diversity and Crop Yield: A Long-Term Study in a Mediterranean Vineyard. Agric. Ecosyst. Environ. 2022, 326, 107816. [Google Scholar] [CrossRef]
- Antichi, D.; Sbrana, M.; Martelloni, L.; Chehade, L.A.; Fontanelli, M.; Raffaelli, M.; Mazzoncini, M.; Peruzzi, A.; Frasconi, C. Agronomic Performances of Organic Field Vegetables Managed with Conservation Agriculture Techniques: A Study from Central Italy. Agronomy 2019, 9, 810. [Google Scholar] [CrossRef] [Green Version]
- Vanden Heuvel, J.; Centinari, M. Under-Vine Vegetation Mitigates the Impacts of Excessive Precipitation in Vineyards. Front. Plant Sci. 2021, 12, 1542. [Google Scholar] [CrossRef] [PubMed]
- Pergher, G.; Gubiani, R.; Mainardis, M. Field Testing of a Biomass-Fueled Flamer for in-Row Weed Control in the Vineyard. Agriculture 2019, 9, 210. [Google Scholar] [CrossRef] [Green Version]
- Bechar, A.; Vigneault, C. Agricultural Robots for Field Operations. Part 2: Operations and Systems. Biosyst. Eng. 2017, 153, 110–128. [Google Scholar] [CrossRef]
- Magni, S.; Sportelli, M.; Grossi, N.; Volterrani, M.; Minelli, A.; Pirchio, M.; Fontanelli, M.; Frasconi, C.; Gaetani, M.; Martelloni, L.; et al. Autonomous Mowing and Turf-Type Bermudagrass as Innovations for an Environment-Friendly Floor Management of a Vineyard in Coastal Tuscany. Agriculture 2020, 10, 189. [Google Scholar] [CrossRef]
- Sportelli, M.; Frasconi, C.; Fontanelli, M.; Pirchio, M.; Raffaelli, M.; Magni, S.; Caturegli, L.; Volterrani, M.; Mainardi, M.; Peruzzi, A. Autonomous Mowing and Complete Floor Cover for Weed Control in Vineyards. Agronomy 2021, 11, 538. [Google Scholar] [CrossRef]
- Catizone, P.; Zanin, G. Malerbologia, 1st ed.; Patròn Editore: Bologna, Italy, 2001. [Google Scholar]
- Portal to the Flora of Italy. Available online: https://dryades.units.it/floritaly/index.php (accessed on 23 January 2023).
- Emlid. A Reach RTK Docs. Specification. Available online: https://docs.emlid.com/reach/specs/ (accessed on 28 January 2023).
- Sportelli, M.; Luglio, S.M.; Caturegli, L.; Pirchio, M.; Magni, S.; Volterrani, M.; Frasconi, C.; Raffaelli, M.; Peruzzi, A.; Gagliardi, L.; et al. Trampling Analysis of Autonomous Mowers: Implications on Garden Designs. AgriEngineering 2022, 4, 592–605. [Google Scholar] [CrossRef]
- Sanguankeo, P.P.; Leon, R.G.; Malone, J. Impact of Weed Management Practices on Grapevine Growth and Yield Components. Weed Sci. 2009, 57, 103–107. [Google Scholar] [CrossRef]
- Wallace, J.M.; Curran, W.S.; Mortensen, D.A. Cover Crop Effects on Horseweed (Erigeron canadensis) Density and Size Inequality at the Time of Herbicide Exposure. Weed Sci. 2019, 67, 327–338. [Google Scholar] [CrossRef]
- MacLaren, C.; Bennett, J.; Dehnen-Schmutz, K. Management Practices Influence the Competitive Potential of Weed Communities and Their Value to Biodiversity in South African Vineyards. Weed Res. 2019, 59, 93–106. [Google Scholar] [CrossRef]
- Sportelli, M.; Frasconi, C.; Fontanelli, M.; Pirchio, M.; Gagliardi, L.; Raffaelli, M.; Peruzzi, A.; Antichi, D. Innovative Living Mulch Management Strategies for Organic Conservation Field Vegetables: Evaluation of Continuous Mowing, Flaming, and Tillage Performances. Agronomy 2022, 12, 622. [Google Scholar] [CrossRef]
- Pirchio, M.; Fontanelli, M.; Labanca, F.; Sportelli, M.; Frasconi, C.; Martelloni, L.; Raffaelli, M.; Peruzzi, A.; Gaetani, M.; Magni, S.; et al. Energetic Aspects of Turfgrass Mowing: Comparison of Different Rotary Mowing Systems. Agriculture 2019, 9, 178. [Google Scholar] [CrossRef] [Green Version]
- Sportelli, M.; Pirchio, M.; Fontanelli, M.; Volterrani, M.; Frasconi, C.; Martelloni, L.; Caturegli, L.; Gaetani, M.; Grossi, N.; Magni, S.; et al. Autonomous Mowers Working in Narrow Spaces: A Possible Future Application in Agriculture? Agronomy 2020, 10, 553. [Google Scholar] [CrossRef] [Green Version]
- Dumitraşcu, M.; Marin, A.; Preda, E.; Ţîbîrnac, M.; Vădineanu, A. Trampling Effects on Plant Species Morphology. Plant Biol. 2010, 55, 89–96. [Google Scholar]
- Slaughter, D.C.; Giles, D.K.; Downey, D. Autonomous Robotic Weed Control Systems: A Review. Comput. Electron. Agric. 2008, 61, 63–78. [Google Scholar] [CrossRef]
- Pessina, D.; Galli, L.E.; Santoro, S.; Facchinetti, D. Sustainability of Machinery Traffic in Vineyard. Sustainability 2021, 13, 2475. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
| Operation | Number of Operations | Product/Equipment | Rate | Plots | |||
|---|---|---|---|---|---|---|---|
| LM1–AM | LM2–AM | LM3–AM | LM3–CM | ||||
| 2019 | |||||||
| Herbicide application | 2 | Glyphos Dakar | 1.8 kg ha−1 | - | - | - | ✓ |
| Conventional mowing | 3 | Celli TCB/S Mulcher | n.a. | - | - | - | ✓ |
| Autonomous mowing | 132 | Husqvarna automower 535 AWD | 5 h d−1 | ✓ | ✓ | ✓ | - |
| Living mulch hand sowing * | 1 | -Living mulch 1 (LM1) blend: Lolium perenne L. cv Tetragreen (50%) L. perenne L. cv Dasher 3 (50%). | LM1: 50·g·m−2 | ✓ | ✓ | - | - |
| -Living mulch 2 (LM2) blend: Trifolium repens L. cv Huia (95%) T. repens L. cv Pertina (5%). | LM2: 20 g m−2 | ||||||
| 2020 | |||||||
| Herbicide application | 2 | Glyphos Ultra | 7 kg ha−1 | - | - | - | ✓ |
| Conventional mowing | 4 | Celli TCB/S Mulcher | n.a. | - | - | - | ✓ |
| Autonomous mowing | 131 | Husqvarna automower 535 AWD | 5 h d−1 | ✓ | ✓ | ✓ | - |
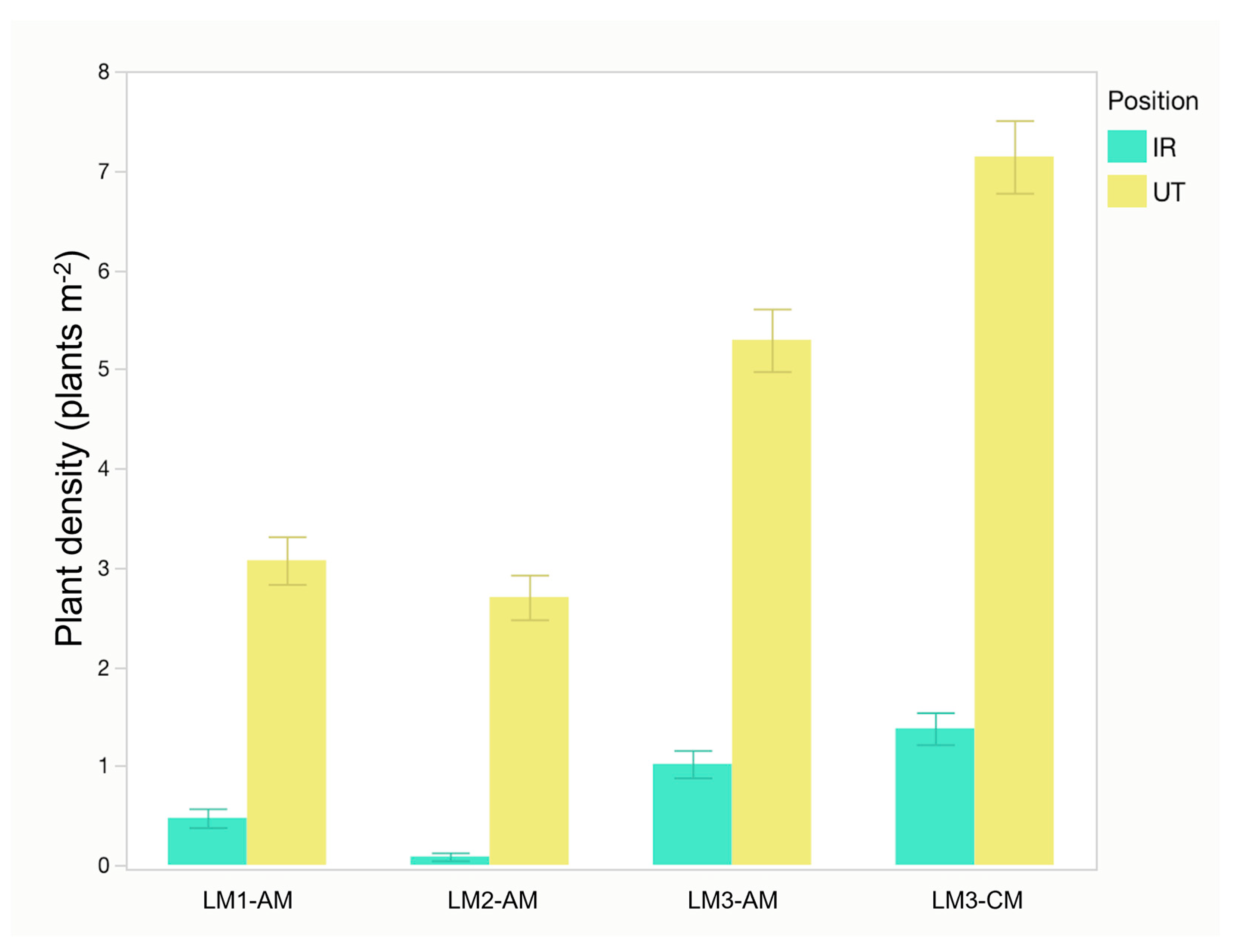
| Position | Treatment | Plant Density Mean Values (Plant m−2) | Standard Error | 95% CI | |
|---|---|---|---|---|---|
| Lower Bond | Upper Bond | ||||
| IR | LM1–AM | 0.48 b 1 | 0.09 | 0.32 | 0.70 |
| LM2–AM | 0.09 c | 0.04 | 0.03 | 0.22 | |
| LM3–AM | 1.02 a | 0.14 | 0.78 | 1.33 | |
| LM3–CM | 1.38 a | 0.16 | 1.09 | 1.74 | |
| UT | LM1–AM | 3.07 c | 0.24 | 2.63 | 3.58 |
| LM2–AM | 2.70 c | 0.23 | 2.29 | 3.18 | |
| LM3–AM | 5.29 b | 0.32 | 4.70 | 5.95 | |
| LM3–CM | 7.14 a | 0.37 | 6.45 | 7.90 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peruzzi, A.; Gagliardi, L.; Fontanelli, M.; Frasconi, C.; Raffaelli, M.; Sportelli, M. Continuous Mowing for Erigeron canadensis L. Control in Vineyards. Agronomy 2023, 13, 409. https://doi.org/10.3390/agronomy13020409
Peruzzi A, Gagliardi L, Fontanelli M, Frasconi C, Raffaelli M, Sportelli M. Continuous Mowing for Erigeron canadensis L. Control in Vineyards. Agronomy. 2023; 13(2):409. https://doi.org/10.3390/agronomy13020409
Chicago/Turabian StylePeruzzi, Andrea, Lorenzo Gagliardi, Marco Fontanelli, Christian Frasconi, Michele Raffaelli, and Mino Sportelli. 2023. "Continuous Mowing for Erigeron canadensis L. Control in Vineyards" Agronomy 13, no. 2: 409. https://doi.org/10.3390/agronomy13020409