

Design and Optimization of a Machine-Vision-Based Complementary Seeding Device for Tray-Type Green Onion Seedling Machines
Abstract
:1. Introduction
2. Materials and Methods
2.1. Hardware System
2.1.1. Information Collection Unit
2.1.2. Control Unit
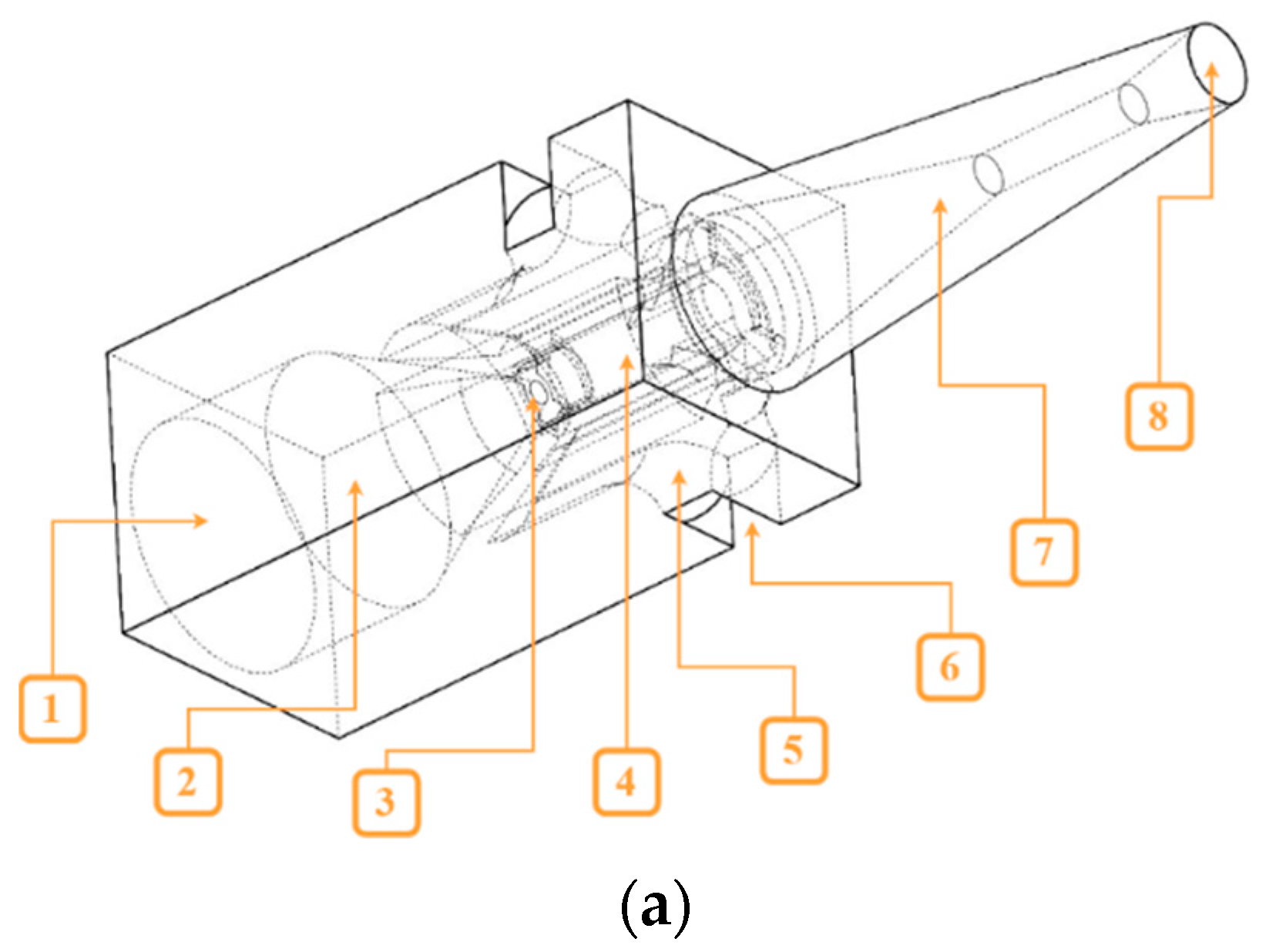
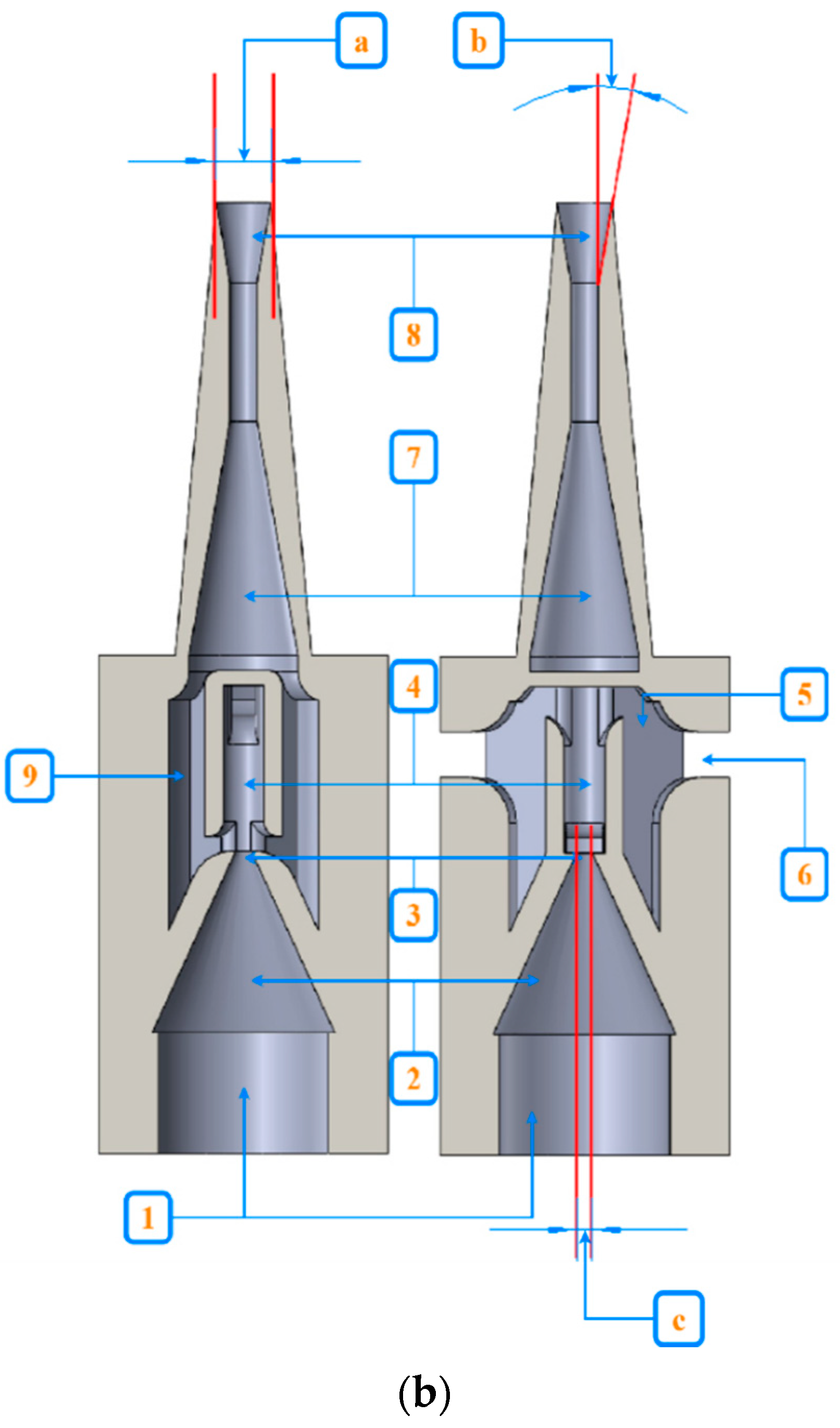
2.1.3. Complementary Seeding Unit
2.2. Software System
2.2.1. Image Acquisition
2.2.2. Image Processing
Color Thresholding
Image Grayscale and Morphological Processing
H-Dome Algorithm and Image Reconstruction
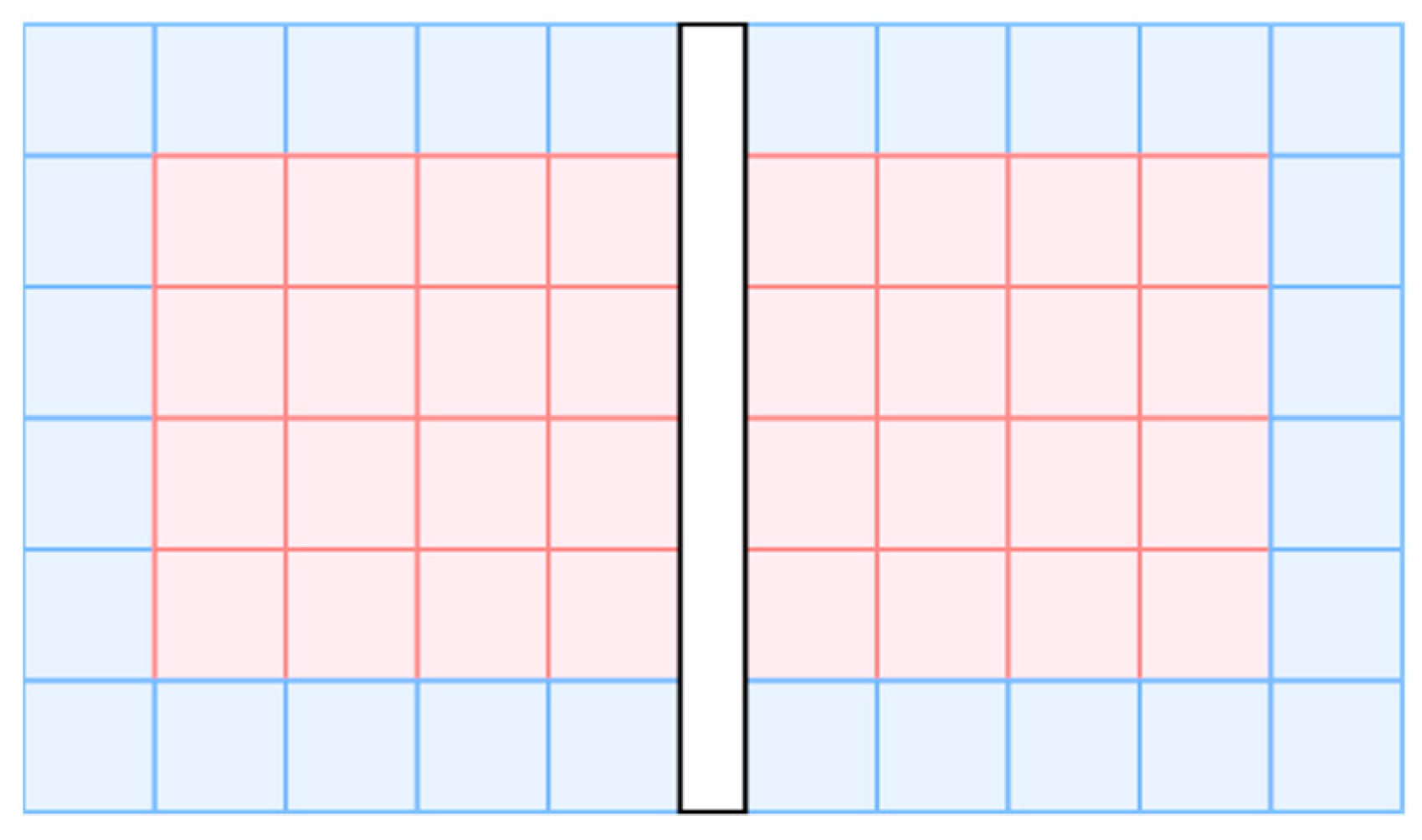
Image Region Segmentation
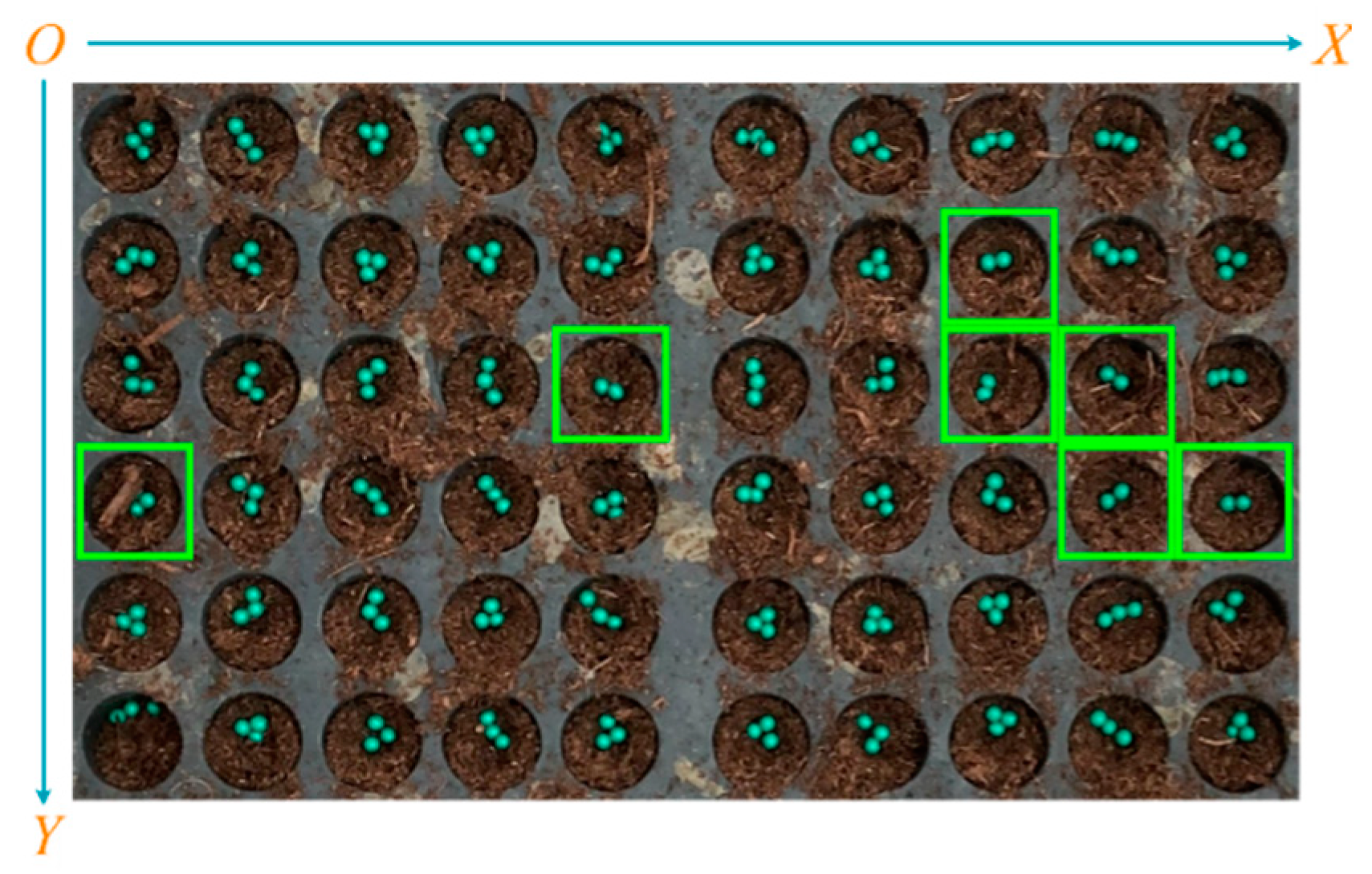
Majority Mechanism
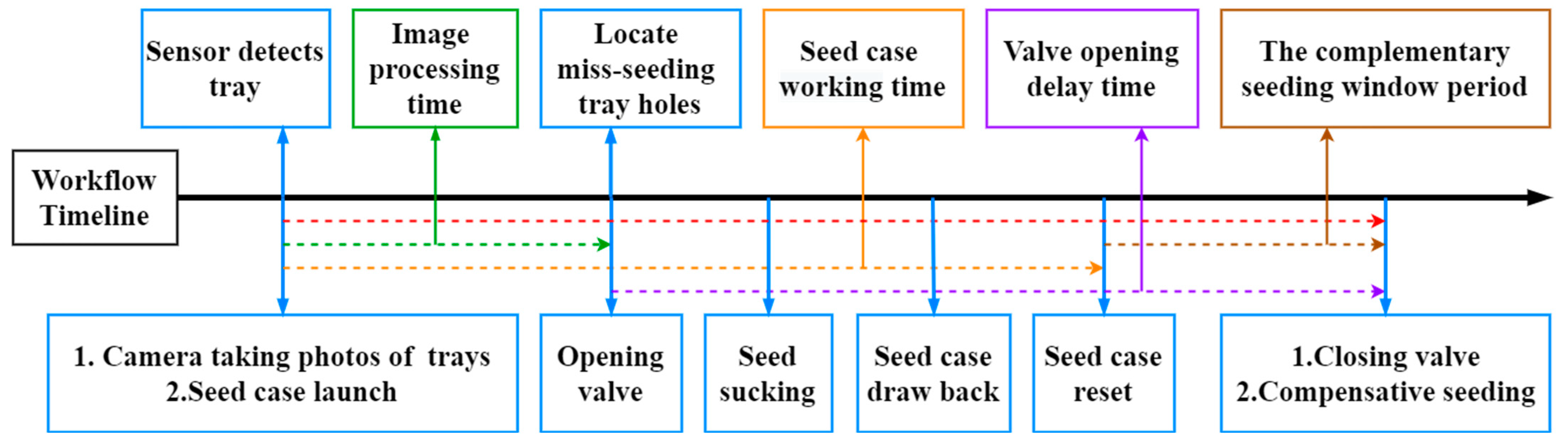
2.2.3. Complementary Seeding Workflow
Locating Miss-Seeding Tray Holes
Seed Case Launch and Seed Suction
Seed Case Reset and Seed Release
2.3. VGSN Experimental Program
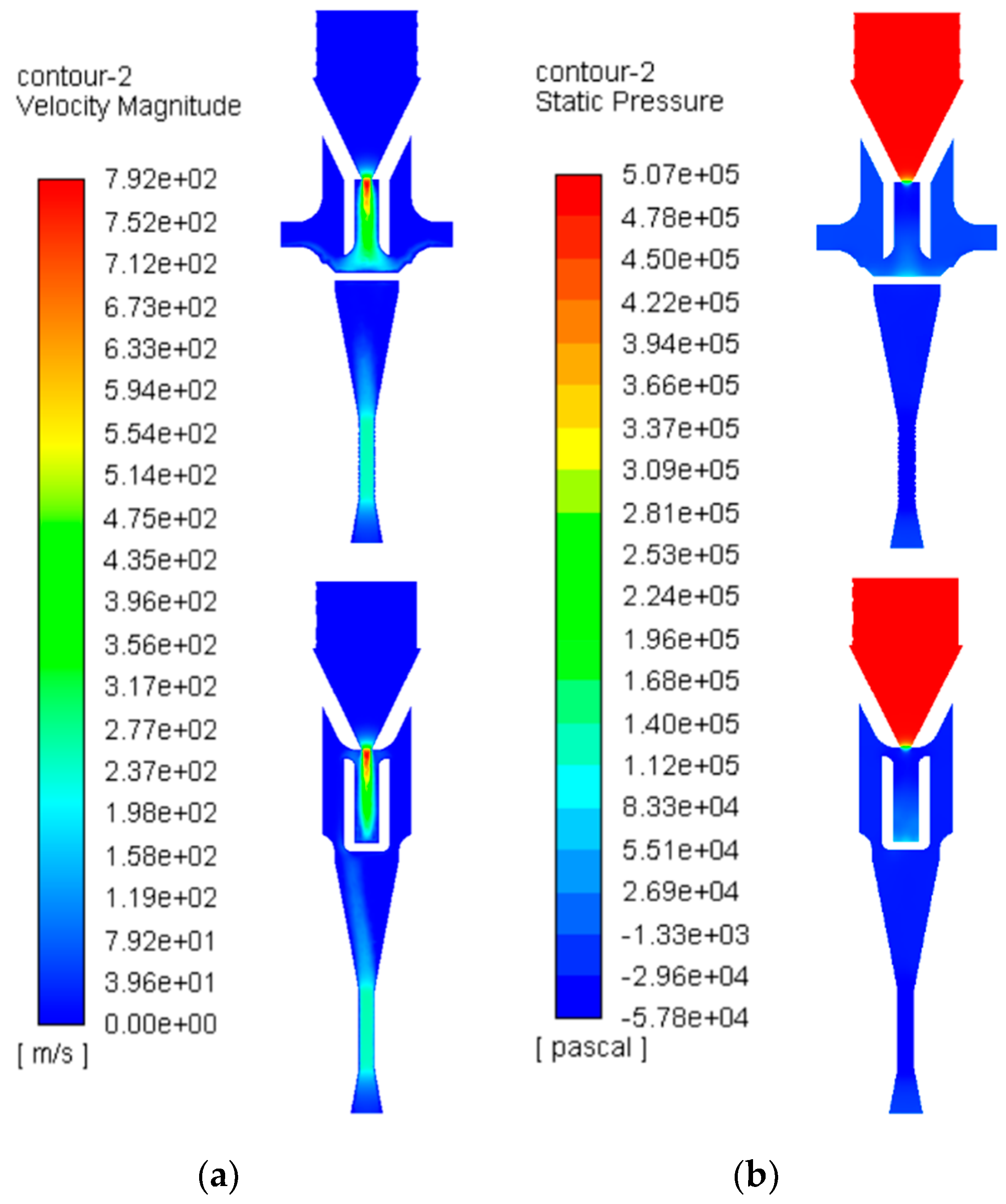
2.3.1. Internal Flow Characteristics
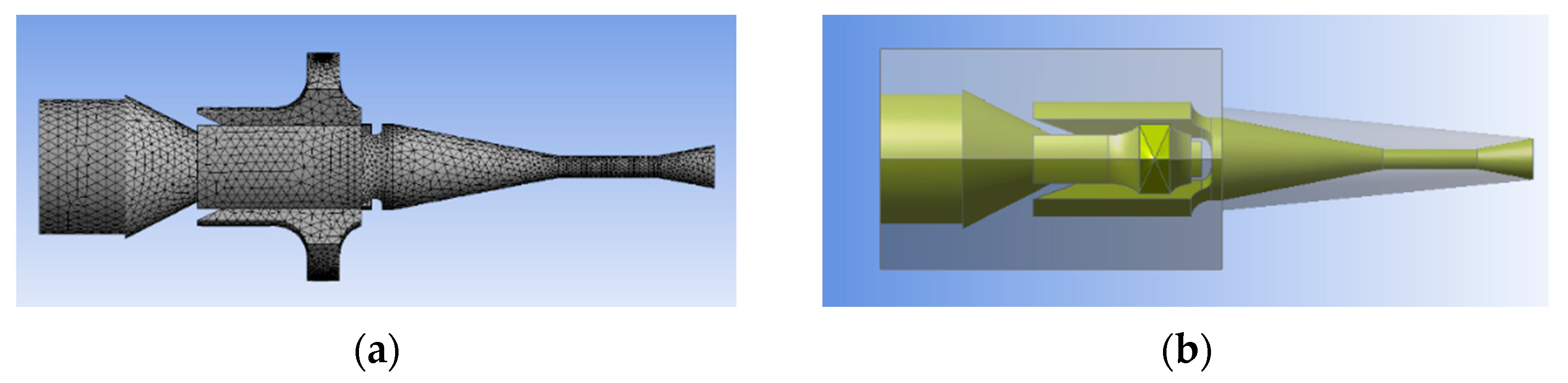
2.3.2. CFD Numerical Simulation
2.3.3. Key Details of Design Experimental Methods
- (1)
- Successful seed suction is defined as follows: first, the VGSN sucks a seed from the seed storage box. After disengaging the seed storage box, the seed remains stable at the suction port and falls down when the input air is cut off.
- (2)
- Repetitionary seed suction is defined as follows: first, the VGSN sucks more than one seed in the seed storage box. After disengaging from the seed storage box, multiple seeds are in a stable state at the suction port, and multiple seeds fall simultaneously when the air is cut off.
2.3.4. Seed Suction Nozzle Test Results and Analysis
Regression Modeling and Significance Testing
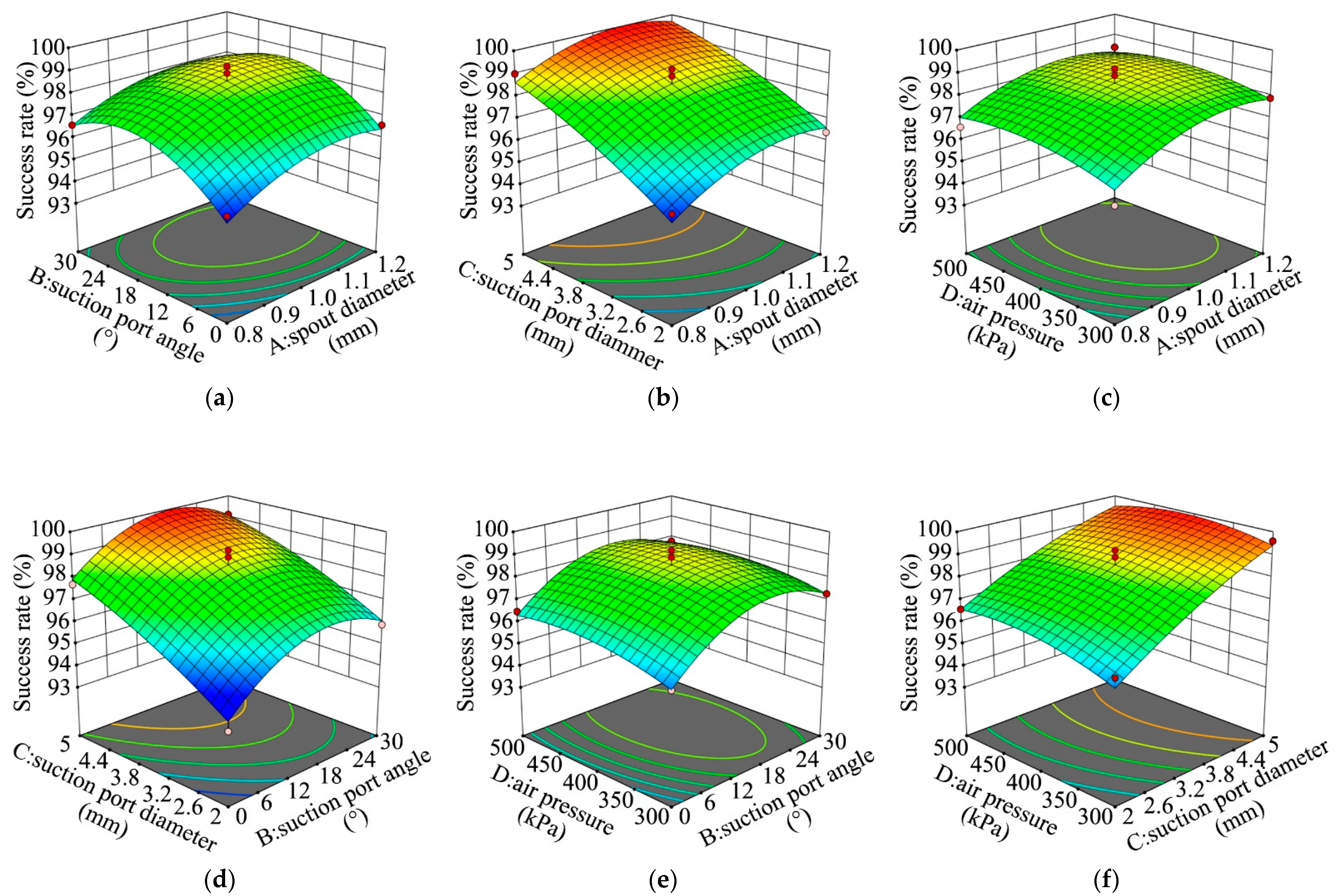
Response Surface Analysis
- (1)
- Response surface analysis of success rate of seed sucking
- (2)
- Response surface analysis of repetition rate of seed sucking
Optimal Working Parameters Determination
3. Results and Discussion
3.1. Experimental Material Selection
3.2. Seeding EFFECT TEST of the TGOSM
3.3. Seed Suction Nozzle Suction Effect Testing and Verification
3.4. Testing the Performance of Miss-Seeding Tray Hole Recognition
3.5. Performance Testing of the Complementary Seeding Unit
3.6. Discussion
4. Conclusions
- (1)
- A majority mechanism-based miss-seeding tray hole rapid detection method was proposed, which uses image processing techniques including: color thresholding, morphological processing, the H-Dome method, and image reconstruction. The experimental results revealed that regarding the average values of precision, recall, and F1 scores for miss-seeding tray holes identification, the majority mechanism-based methods are better than those using only a single space.
- (2)
- The structural parameters of the vacuum-generated seed suction nozzle were designed and optimized, and the real object was produced using 3D printing technology. The performance of the parameters was verified through numerical simulation and experiment. The test results revealed that the vacuum nozzle can satisfy the seed suction requirements.
- (3)
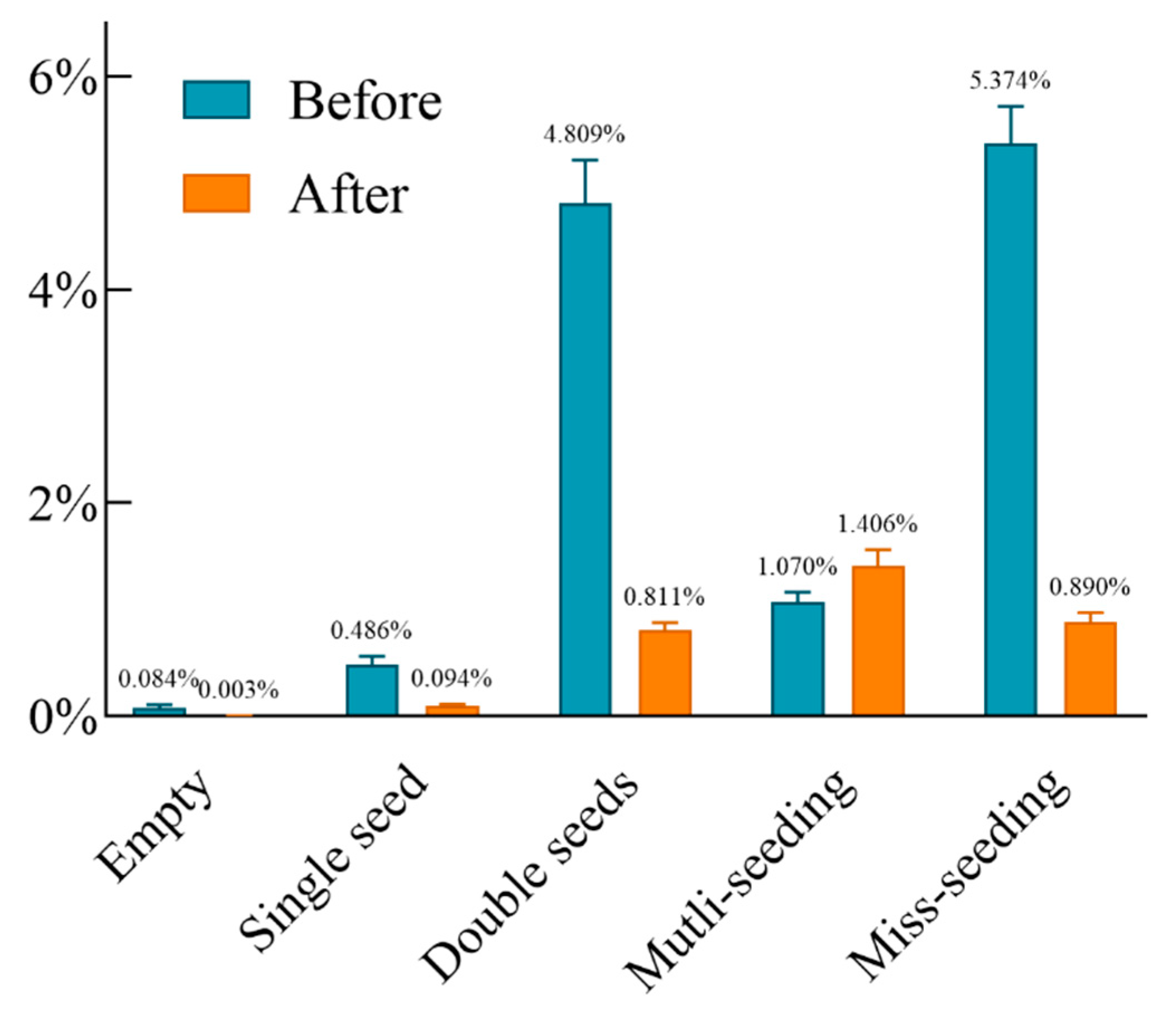
- A complementary seeding device based on a tray-type green onion seedling machine was proposed to replace manual complementary seeding. The device includes the identification of miss-seeding holes, the control of seed case movement, and the seed uptake and release from the seed suction nozzle array. The effect of complementary seeding was also studied experimentally by the seedling process in the actual state. The results revealed that the complementary seeding device reduced the miss-seeding tray holes rate from 5.374% to 0.890%, which can fully satisfy the seedling requirements of onion (Figure S1).
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kayat, F.; Mohammed, A.; Ibrahim, A.M. Spring Onion (Allium fistulosum L.) Breeding Strategies. In Advances in Plant Breeding Strategies: Vegetable Crops; Al-Khayri, J.M., Jain, S.M., Johnson, D.V., Eds.; Springer: Cham, Switzerland, 2021; pp. 135–182. [Google Scholar] [CrossRef]
- Padula, G.; Xia, X.; Hołubowicz, R. Welsh Onion (Allium fistulosum L.) Seed Physiology, Breeding, Production and Trade. Plants 2022, 11, 343. [Google Scholar] [CrossRef] [PubMed]
- Dai, J.; Dong, H. Intensive Cotton Farming Technologies in China: Achievements, Challenges and Countermeasures. Field Crops Res. 2014, 155, 99–110. [Google Scholar] [CrossRef]
- Shao, W.; Li, T.; Wu, Y.; Chen, Y.; Li, G.; Hou, J. Design and test of precision seed metering device for the seedling raising machine of chinese onion. J. Agric. Mech. Res. 2022, 44, 119–127, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Altuntaş, Y.; Cömert, Z.; Kocamaz, A.F. Identification of Haploid and Diploid Maize Seeds Using Convolutional Neural Networks and a Transfer Learning Approach. Comput. Electron. Agric. 2019, 163, 104874. [Google Scholar] [CrossRef]
- Zhuang, X.; Bi, M.; Guo, J.; Wu, S.; Zhang, T. Development of an Early Warning Algorithm to Detect Sick Broilers. Comput. Electron. Agric. 2018, 144, 102–113. [Google Scholar] [CrossRef]
- Benelli, A.; Cevoli, C.; Fabbri, A.; Ragni, L. Ripeness Evaluation of Kiwifruit by Hyperspectral Imaging. Biosyst. Eng. 2021. [Google Scholar] [CrossRef]
- Gai, R.; Chen, N.; Yuan, H. A Detection Algorithm for Cherry Fruits Based on the Improved YOLO-v4 Model. Neural Comput. Appl. 2021. [Google Scholar] [CrossRef]
- Kasinathan, T.; Singaraju, D.; Uyyala, S.R. Insect Classification and Detection in Field Crops Using Modern Machine Learning Techniques. Inf. Process. Agric. 2021, 8, 446–457. [Google Scholar] [CrossRef]
- Sun, K.; Wang, X.; Liu, S.; Liu, C. Apple, Peach, and Pear Flower Detection Using Semantic Segmentation Network and Shape Constraint Level Set. Comput. Electron. Agric. 2021, 185, 106150. [Google Scholar] [CrossRef]
- Fang, L.; Wu, Y.; Li, Y.; Guo, H.; Zhang, H.; Wang, X.; Xi, R.; Hou, J. Ginger Seeding Detection and Shoot Orientation Discrimination Using an Improved YOLOv4-LITE Network. Agronomy 2021, 11, 2328. [Google Scholar] [CrossRef]
- Kim, W.-S.; Lee, D.-H.; Kim, Y.-J. Machine Vision-Based Automatic Disease Symptom Detection of Onion Downy Mildew. Comput. Electron. Agric. 2020, 168, 105099. [Google Scholar] [CrossRef]
- Sun, J.; Zhang, Y.; Zhu, X.; Zhang, Y. Deep Learning Optimization Method for Counting Overlapping Rice Seeds. J. Food Process Eng. 2021, 44. [Google Scholar] [CrossRef]
- Taheri-Garavand, A.; Nasiri, A.; Fanourakis, D.; Fatahi, S.; Omid, M.; Nikoloudakis, N. Automated In Situ Seed Variety Identification via Deep Learning: A Case Study in Chickpea. Plants 2021, 10, 1406. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Xiao, X.; Liang, X.; Wang, J.; Wu, C.; Chen, J. Plug hole positioning and seedling shortage detecting system on automatic seedling supplementing test-bed for vegetable plug seedlings. Trans. Chin. Soc. Agric. Eng. 2018, 34, 35–41, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Dong, W.; Ma, X.; Li, H.; Tan, S.; Guo, L. Detection of Performance of Hybrid Rice Pot-Tray Sowing Utilizing Machine Vision and Machine Learning Approach. Sensors 2019, 19, 5332. [Google Scholar] [CrossRef] [PubMed]
- Li, H.; Li, Z.; Dong, W.; Cao, X.; Wen, Z.; Xiao, R.; Wei, Y.; Zeng, H.; Ma, X. An Automatic Approach for Detecting Seedlings per Hill of Machine-Transplanted Hybrid Rice Utilizing Machine Vision. Comput. Electron. Agric. 2021, 185, 106178. [Google Scholar] [CrossRef]
- Wang, G.; Liu, W.; Wang, A.; Bai, K.; Zhou, H. Design and experiment on intelligent reseeding devices for rice tray nursing seedling based on machine vision. Trans. Chin. Soc. Agric. Eng. 2018, 34, 35–42, (In Chinese with English abstract). [Google Scholar] [CrossRef]
- Bai, J.; Hao, F.; Cheng, G.; Li, C. Machine Vision-Based Supplemental Seeding Device for Plug Seedling of Sweet Corn. Comput. Electron. Agric. 2021, 188, 106345. [Google Scholar] [CrossRef]
- Wen, Y.; Zhang, L.; Huang, X.; Yuan, T.; Zhang, J.; Tan, Y.; Feng, Z. Design of and Experiment with Seedling Selection System for Automatic Transplanter for Vegetable Plug Seedlings. Agronomy 2021, 11, 2031. [Google Scholar] [CrossRef]
- Asadi, M.; Jabraeil Jamali, M.A.; Parsa, S.; Majidnezhad, V. Detecting Botnet by Using Particle Swarm Optimization Algorithm Based on Voting System. Future Gener. Comput. Syst. 2020, 107, 95–111. [Google Scholar] [CrossRef]
- Atallah, R.; Al-Mousa, A. Heart Disease Detection Using Machine Learning Majority Voting Ensemble Method. In Proceedings of the 2019 2nd International Conference on New Trends in Computing Sciences (ICTCS), Amman, Jordan, 9–11 October 2019; pp. 1–6. [Google Scholar]
- Gregoretti, F.; Cortesi, A.; Oliva, G.; Bodega, B.; Antonelli, L. An Algorithm for the Analysis of the 3D Spatial Organization of the Genome. Capturing Chromosome Conform. 2021, 299–320. [Google Scholar] [CrossRef]
- Schwegmann, C.P.; Kleynhans, W.; Salmon, B.P.; Mdakane, L. Ship Detection in Sentinel-1 Imagery Using the H-Dome Transformation. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 3711–3714. [Google Scholar]
- Vincent, L. Morphological Grayscale Reconstruction in Image Analysis: Applications and Efficient Algorithms. IEEE Trans. Image Process. 1993, 2, 176–201. [Google Scholar] [CrossRef] [PubMed] [Green Version]
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | X1 | X2 | X3 | X4 | Success Rate Y1/% | Repetition Rate Y2/% |
|---|---|---|---|---|---|---|
| 1 | −1 | −1 | 0 | 0 | 95.2 | 0.2 |
| 2 | 1 | −1 | 0 | 0 | 96.6 | 0.6 |
| 3 | −1 | 1 | 0 | 0 | 96.6 | 0.8 |
| 4 | 1 | 1 | 0 | 0 | 97.6 | 1.1 |
| 5 | 0 | 0 | −1 | −1 | 96.1 | 0.8 |
| 6 | 0 | 0 | 1 | −1 | 99.6 | 1.5 |
| 7 | 0 | 0 | -1 | 1 | 96.6 | 1.0 |
| 8 | 0 | 0 | 1 | 1 | 99.3 | 1.8 |
| 9 | −1 | 0 | 0 | −1 | 95.7 | 0.5 |
| 10 | 1 | 0 | 0 | −1 | 97.9 | 1.1 |
| 11 | −1 | 0 | 0 | 1 | 96.6 | 0.6 |
| 12 | 1 | 0 | 0 | 1 | 98.4 | 1.1 |
| 13 | 0 | −1 | −1 | 0 | 93.9 | 0.8 |
| 14 | 0 | 1 | −1 | 0 | 95.9 | 1.1 |
| 15 | 0 | −1 | 1 | 0 | 97.7 | 1.6 |
| 16 | 0 | 1 | 1 | 0 | 99.1 | 2.1 |
| 17 | −1 | 0 | −1 | 0 | 95.4 | 0.7 |
| 18 | 1 | 0 | −1 | 0 | 96.4 | 0.9 |
| 19 | −1 | 0 | 1 | 0 | 99.0 | 1.5 |
| 20 | 1 | 0 | 1 | 0 | 99.5 | 1.8 |
| 21 | 0 | −1 | 0 | −1 | 95.6 | 0.5 |
| 22 | 0 | 1 | 0 | −1 | 97.3 | 1.2 |
| 23 | 0 | −1 | 0 | 1 | 96.5 | 0.6 |
| 24 | 0 | 1 | 0 | 1 | 97.8 | 1.2 |
| 25 | 0 | 0 | 0 | 0 | 98.1 | 0.7 |
| 26 | 0 | 0 | 0 | 0 | 98.3 | 0.6 |
| 27 | 0 | 0 | 0 | 0 | 99.2 | 0.8 |
| 28 | 0 | 0 | 0 | 0 | 98.2 | 0.7 |
| 29 | 0 | 0 | 0 | 0 | 98.9 | 0.9 |
| Source of Variance | Success Rate Y1 | Repetition Rate Y2 | ||||||
|---|---|---|---|---|---|---|---|---|
| Sum of Squares | Degree of Freedom | Mean Square | p-Value | Sum of Squares | Degree of Freedom | Mean Square | p-Value | |
| Model | 60.09 | 14 | 4.29 | <0.0001 ** | 5.45 | 14 | 0.3896 | <0.0001 ** |
| X1 | 5.20 | 1 | 5.20 | 0.0001 ** | 0.4408 | 1 | 0.4408 | 0.0002 ** |
| X2 | 6.45 | 1 | 6.45 | <0.0001 ** | 0.8533 | 1 | 0.8533 | <0.0001 ** |
| X3 | 33.00 | 1 | 33.00 | <0.0001 ** | 2.08 | 1 | 2.08 | <0.0001 ** |
| X4 | 0.7500 | 1 | 0.7500 | 0.0661 | 0.0408 | 1 | 0.0408 | 0.1485 |
| X1X2 | 0.0400 | 1 | 0.0400 | 0.6524 | 0.0025 | 1 | 0.0025 | 0.7108 |
| X1X3 | 0.0625 | 1 | 0.0625 | 0.5742 | 0.0025 | 1 | 0.0025 | 0.7108 |
| X1X4 | 0.0400 | 1 | 0.0400 | 0.6524 | 0.0025 | 1 | 0.0025 | 0.7108 |
| X2X3 | 0.0900 | 1 | 0.0900 | 0.5012 | 0.0100 | 1 | 0.0100 | 0.4618 |
| X2X4 | 0.0400 | 1 | 0.0400 | 0.6524 | 0.0025 | 1 | 0.0025 | 0.7108 |
| X3X4 | 0.1600 | 1 | 0.1600 | 0.3728 | 0.0025 | 1 | 0.0025 | 0.7108 |
| 3.68 | 1 | 3.68 | 0.0006 ** | 0.0185 | 1 | 0.0185 | 0.3215 | |
| 12.55 | 1 | 12.55 | <0.0001 ** | 0.0227 | 1 | 0.0227 | 0.2733 | |
| 0.5968 | 1 | 0.5968 | 0.0971 | 1.85 | 1 | 1.85 | <0.0001 ** | |
| 1.26 | 1 | 1.26 | 0.0216 * | 0.0333 | 1 | 0.0333 | 0.1889 | |
| Residual | 2.64 | 14 | 0.1888 | 0.2445 | 14 | 0.0175 | ||
| Lack of fit | 1.71 | 10 | 0.1711 | 0.6859 | 0.1925 | 10 | 0.0193 | 0.3758 |
| Pure error | 0.9320 | 4 | 0.2330 | 0.0520 | 4 | 0.0130 | ||
| Correct total | 62.73 | 28 | 5.70 | 28 | ||||
| Category | Empty Tray Hole | Single Seed Tray Hole | Double Seeds Tray Hole | Triple Seeds Tray Hole | Repeat Seeding Tray Hole |
|---|---|---|---|---|---|
| Total | 9 | 53 | 540 | 10,281 | 117 |
| Percentage | 0.082% | 0.482% | 4.909% | 93.464% | 1.064% |
| Results | Success Rate/% | Repetition Rate/% |
|---|---|---|
| Test results | 98.4 | 0.7 |
| Predicted value | 98.79 | 0.67 |
| Relative error | 0.40 | 4.29 |
| Image Processing Method | TP | FN | FP | TN |
|---|---|---|---|---|
| HSL-Based | 561 | 38 | 24 | 10,377 |
| RGB-Based | 543 | 49 | 41 | 10,367 |
| HSV-Based | 554 | 31 | 27 | 10,388 |
| Decision by majority | 583 | 18 | 9 | 10,389 |
| Recognizable Miss-Seeding Tray Hole | Recognizable Full-Seeding Tray Hole | |
|---|---|---|
| Actual miss-seeding tray hole | TP (True positive) | FN (False negative) |
| Actual full-seeding tray hole | FP (False positive) | TN (False negative) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, J.; Li, Y.; Zhou, K.; Wu, Y.; Hou, J. Design and Optimization of a Machine-Vision-Based Complementary Seeding Device for Tray-Type Green Onion Seedling Machines. Agronomy 2022, 12, 2180. https://doi.org/10.3390/agronomy12092180
Gao J, Li Y, Zhou K, Wu Y, Hou J. Design and Optimization of a Machine-Vision-Based Complementary Seeding Device for Tray-Type Green Onion Seedling Machines. Agronomy. 2022; 12(9):2180. https://doi.org/10.3390/agronomy12092180
Chicago/Turabian StyleGao, Junpeng, Yuhua Li, Kai Zhou, Yanqiang Wu, and Jialin Hou. 2022. "Design and Optimization of a Machine-Vision-Based Complementary Seeding Device for Tray-Type Green Onion Seedling Machines" Agronomy 12, no. 9: 2180. https://doi.org/10.3390/agronomy12092180