1. Introduction
In Valencia (Spain), citrus fruit are mostly destined for the fresh fruits market and are harvested by hand. The mechanical harvesting technology is being developed in fruit and nut crops with the aim of reducing the cost of harvesting and the limitations of available labor [
1]. Canopy shaker and trunk shaker systems are presented as technologies able to increase labour productivity by up to 15-fold and reduce costs by up to 50% [
2]. Previous studies showed the effectiveness of vibration systems for mechanical citrus harvesting [
3,
4]. Canopy shaking systems have been developed in citrus for industrial transformation, where damage to the fruit is less important. These systems are under development and have a promising future [
5,
6]. However, the fruit damages produced are crucial for the fresh market. Mechanical harvesting systems have been studied to reduce the high costs of manual harvesting, but the damages produced to the fruit are crucial. Previous studies showed the effectiveness of vibration systems for mechanical citrus harvesting [
7,
8]. Vibrational limb and trunk shaking systems have been tested for mechanical citrus harvesting [
3,
9,
10,
11,
12]. Trunk shakers can be used to harvest citrus fruits; frequencies around 15 to 25 Hz and amplitudes around 0.02 m have shown promising results. The removal percentages depend on the harvesting device, the variety and the structure of the tree. In the case of citrus fruits for fresh market, [
13] showed that trunk shakers could reach a harvesting efficiency of 70%, while hand-held shakers could reach a harvesting efficiency value of 76% on branches. In both cases, proper structure of the tree and its branches could increase harvesting efficiency. Subsequently, [
14] managed to increase the average harvesting efficiency with trunk shakers, with average values of 70–85%, with acceptable levels of defoliation and with fruit retaining its calyx. However, limiting damage to fruit destined for the fresh market is an issue of concern for the implementation of mechanical harvesting. In order to gather more information about fruit detachment principles, image analysis was used with a high-speed commercial camera to allow the recognition of olive fruits, obtaining fruit movement parameters such as velocity, acceleration, and stalk torsion [
15]. The movement of the fruit as a mathematical pendulum was described by [
16] during branch vibrations using a theoretical non-linear numerical mathematical model. Laboratory studies showed the possibility of detaching citrus fruit using lower frequencies and higher strokes to reduce leaf losses [
7]. The mechanical citrus harvesting parameters (frequency, amplitude and duration) to ensure maximum removal efficiency were determined by [
7] using a laboratory experimental device. The results were compared to those found in field tests. The possibility of reducing the frequencies and increasing the amplitudes to achieve an optimal mechanical citrus harvest was confirmed (amplitude values higher than 0.06 m and frequencies around 5 Hz). The problem of the increase of leaf and stem debris in citrus mechanical harvesting was addressed [
17]. Lower frequencies and higher amplitudes have proven to reduce leaf losses in laboratory studies [
18]. However, conventional trunk shakers are not able to increase the amplitude according to the laboratory proposed values. A cushioned and elevated canvas on the ground has been proven to reduce the collecting damages [
19]. Previous studies addressed the vibratory behavior of citrus fruits using high-speed cameras to assess the parameters involved in fruit detachment during vibratory mechanical harvesting [
13]. They used vibrations with strokes from 60 to 180 mm and frequencies from 3 to 18 Hz.
A light-weight experimental shaker was developed and successfully tested to harvest ornamental citrus trees [
20]. The frequency used was between 4 and 6 Hz, and the stroke was 0.06 m. The gripper was capable of grasping the low diameter trunk to be shaken. Low-frequency commercially available canopy shakers, that work with lower frequency, can not be used in Valencia (Spain) citrus orchards due to the big size of the machines and the excessive damage to the fresh market fruit. Then, the light-weight experimental shaker suscesfully used in ornamental trees was improved to harvest fresh citrus orchards, gripping the main branches [
21]. Elevated canvases were employed to collect the fruit without damage. Severe damages were very low (2% of the detached fruits). However, fruit light damages on the tree during the high-amplitude vibration seemed to be relevant, 78% of slightly damaged fruits when using the experimental shaker compared to 14% when using a trunk shaker [
22]. The higher damage percentage could be due to the fact that some of the fruits are being rubbed against the branches and other fruits during the vibration. The objective of this study was to analyze the fruit movement during the vibration with the experimental shaker, compared to the movement when vibrating with an orchard tractor-mounted trunk shaker, related to the previously proven increase of slightly damaged fruit when using the experimental shaker.
2. Materials and Methods
The mechanised harvesting trials were carried out in an experimental plantation of ANECOOP located in Museros (Valencia, Spain). The trees (‘Caracara’ variety) were in good health and nutritional condition, assessed by the agriculture cooperative technician, with no particular nutritional deficiencies and appropriate growth and characteristics according to the variety and age. Two harvesting systems were used to detach the fruit. The first was a commercial trunk shaker (CTS) and the second was an experimental light-weight shaker (ELWS), as shown in
Figure 1. The CTS was tractor-driven (66 kW four-wheel drive model) and consisted of a vibrating head mounted on an articulated extension arm coupled to the tractor’s front three-point hitch with two clamping arms with a mass of 730 kg. The vibration was driven by the tractor’s power take-off via two hydraulic oil pumps. The shaker drove an eccentric mass of 16 kg, with an eccentricity of 0.13 m, producing an orbital vibration (Topavi light shaker, Maquinaria Agrícola Garrido S.L. (Topavi), Autol, Spain,
www.topavi.es). This CTS allows the regulation of the vibration generated and can be used in mechanized citrus harvesting [
14]. The vibration produced was regulated with a peak-to-peak amplitude of 0.06 m. The ELWS was designed for low-frequency and high-amplitude vibration of citrus fruits [
22]. The ELWS consists of a disc that is driven by a hydraulic motor; therefore, by modifying the hydraulic flow, the vibration frequency can be modified. A rod is connected to the disk. The disc and connecting rod assembly transforms the rotating movement of the hydraulic motor into a reciprocating linear movement. The connecting rod can be attached to the disc through holes located at different distances from the center, with which the stroke can be modified. The opposite end of the rod is connected to a slider for pure reciprocating linear motion. The slider is connected to an arm, at the end of which is the clamp with cushioned fingers, which holds the branch (
Figure 1). The vibration produced was unidirectional, applied to the main branches of the tree, and in a wide grip with 60 mm thick rubber. ELWS was driven by a pedestrian hydraulic tractor (Hinowa, Nogara, VR, Italy; Hinowa.com) ‘Hinowa’ model HS 11000 provided with a fork elevator. ELWS was powered by the hydraulic system of a tractor (Lamborghini Plus 990 F) with a flow rate of 21 L/min at 100 bar.
The trees were vibrated at a height of 0.2 m from the ground with the CTS. With the ELWS, the main branches of the tree were selected and vibrated. Each harvesting system was used for the time necessary to detach the fruit susceptible to be detached by the vibration. The vibration process was recorded with a high-speed camera, perpendicular to the canopy stage zone at 300 fps (CASIO model EXF1).
Fifty fruits were manually collected in order to measure fruit quality parameters (retention force, mass, diameters, sugar content and totral acidity). Retention force was measured with a digital dynamometer (Advanced Force Gauge 500 N, Mecmesin, Horsham, UK) with a cylindrical structure that allowed to pull the fruit in the horizontal direction. The fruit collected using the dynamometer were transported to the laboratory the same day where they were tested. Mass was measured with an electronic balance (Mettler Toledo AL104 electronic balance, Rondo Tower, Switzerland). Diameters were registered using a digital caliper electronic vernier scale (Holite Electrical Co., Ningbo, China). Soluble solid content was determined with a digital refractometer (Atago model PAL-3; Atago Co., Tokyo, Japan). Tritatable acidity was measuring with an automatic titrator (Mettler Toledo T50, Rondo Tower, Switzerland). The fruits had an average retention force of 53.5 N (SD ± 20.1), a mass of 187.1 g (SD ± 50.2), and diameters of 72.25 mm (SD ± 6.5) and 66.1 mm (SD ± 6.5). The maturity index was 12.7, with an average sugar content of 14.2 Brix and an average titratable acidity of 11.16 g/L.
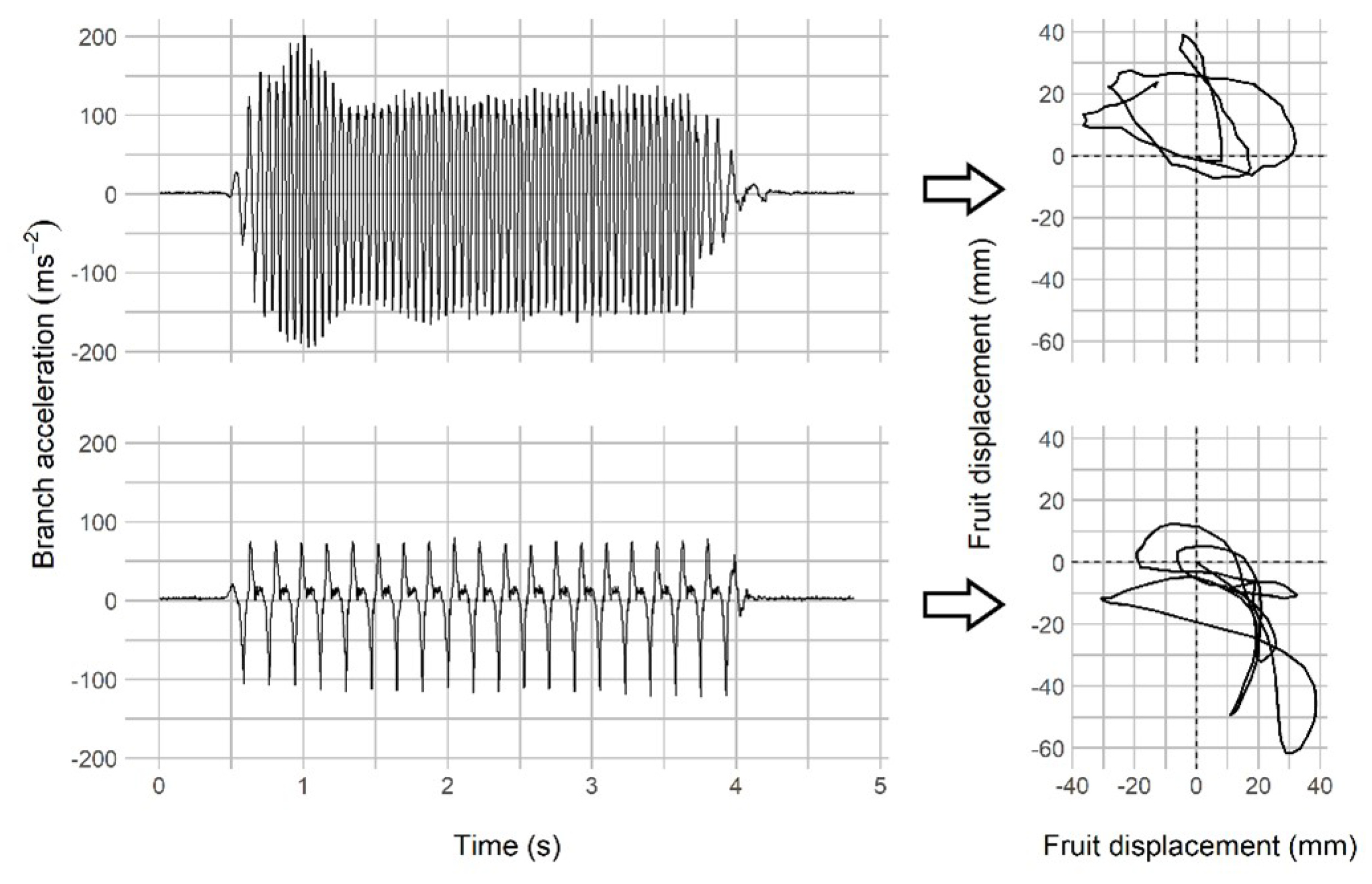
Six trees from every harvesting system were vibrated and the operation was recorded. From these trees, one tree from each harvesting system was selected to assess fruit movement, considering the tree structure, the quality of the high-speed video recordings and the position of the fruits (mostly in the xy plane, perpendicular to the video recording direction). From these selected trees, five fruits were chosen to be studied according to the position of the fruit and the lack of leaves around the movement covering the image. Then, from the different video recordings, two clear high-speed videos from two typical trees were selected, one vibrated by the trunk shaker and one with the experimental shaker (
Figure 2). From each video, five fruits whose movement was clear and mostly in the xy plane (perpendicular to the video recording direction) were chosen to be studied. An electronic sphere (Tuberlog PTR 200, Landtechnik) was used to assess the impact values during vibration. The actual frequencies were measured using a triaxial accelerometer and recorder (Gulf Coast Data Concepts, LLC, Waveland, MS, USA;
http://www.gcdataconcepts.com) that recorded the vibrations at 400 Hz and with high-speed video recording, counting cycle time (with a camera Casio EX-F1, at a rate of 300 images per second, was used to acquire the images with a size of 584 × 312 pixels and a resolution of 3.65 mm/pixel). The image analysis software ImageJ (
https://imagej.nih.gov/ij/) was used to track the position of the fruit during the vibration using a semi-manual process through the menu “Tracing tool/ Analyze/Measure”. The image analysis software was used to identify the citrus fruit from the rest of the image. Every four photograms, the center of the analyzed fruit was manually marked and the coordinates (
,
) registered. The trajectory of the fruit was registered with the coordinate change according to time. Then, fruit distance (
d), fruit displacement (
de), speed (
v), and acceleration (a) were calculated. The distance of the fruit related to the initial position (
d, fruit distance (m)) was calculated according to Equation (
1), being (
,
) the position of the fruit at time i and (
,
) the position of the fruit at the initial time before vibrating.
The relative displacement of the fruit (de, fruit displacement (m)) was calculated according to Equation (
2), being (
,
) and (
,
) the positions of the fruit at two consecutive times.
The speed was calculated according to Equation (
3).
The acceleration was calculated according to Equation (
4).
Analysis of variance (ANOVA) using Statgraphics Centurion 18 Software, version 18.1.13 (Statgraphics Technologies, Inc. The Plains, VA, USA) was applied to evaluate the differences among the samples. The effect of the factor harvesting system on the variables velocity and acceleration values measured on fruit during the harvesting process and fruit displacement related to the initial fruit position was addressed. The LSD Fisher (less significant difference) was used for mean separation at p < 0.05. Although the data did not follow homocedastiticity and normal distribution of residuals, the results of ANOVA were considered valid due to the robustness of the ANOVA. A step-by-step discriminant analysis was also developed to classify the fruit between the two groups (vibrated by the experimental shaker and vibrated by the trunk shaker) according to the registered and calculated variables.
4. Discussion
Fruit damage caused by mechanised harvesting is usually more significant than that caused by manual harvesting [
23]. The application of a forced vibration on the trunk (case of CTS) or on the branch (case of EWLS) causes the fruit movement. As a consequence, these fruits before their detachment have an initial velocity value in the canopy and can reach impacts of greater magnitude than what could be a natural fall or manual harvesting [
8]. This study showed that fruit movement in the canopy is of a large magnitude, with maximum values in the range of 78 to 135.1 mm and dependent on the harvest device. These values facilitate fruit detachment but simultaneously increase fruit damage during picking. Due to the movement of the fruit during the mechanical detachment process, they could hit against other fruits, branches, picking structures or the ground [
24]. However, these impacts can be reduced by using an elevated canvas or picking structures that intercept the fruits with cushioned surfaces [
19]. Other authors suggested the possibility of tree training to limit canopy density to reduce fruit-branch damage, which causes up to 60% of fruit damage when using trunk vibrators [
25].
During the mechanical harvesting process, the movement of the fruit causes stress on the stalk, which, together with material fatigue phenomena, leads to its detachment [
18]. However, the area of fruit abscission differs depending on the harvesting system used. When using canopy shaker systems with reduced frequency values (4.5–5 Hz), the predominant zone of abscission (58.8%) is breakage in the peduncle [
26]. However, with the use of trunk shakers, with higher vibration frequency (9–25 Hz), fruit with calyx with a portion of peduncle or even a portion of branch is reduced to 28% [
13].
The fruit requires a vibration time for its abscission. During citrus harvesting with trunk shakers, the fruit removal percentage exhibited a logarithmic behavior with time, with most of the fruit detached in the first 2–3 s of vibration [
7]. The results obtained have shown that the movement of the fruit in the tree canopy has been generated with high displacement in the case of ELWS, higher than CTS. This high displacement, together with low-frequency values have been shown to be the most effective combination for fruit detachment [
18].
Vibration frequency has proved to be an important parameter in the harvesting operation. The trends in the development of harvesting systems are moving toward the application of specific vibration parameters on different parts of the tree to improve harvesting efficiency and reduce tree damage [
27]. In fact, research applied to the fruiting branches of the same tree shows that there are differences in the values of their natural frequencies [
28]. The regulation of each harvesting device was determined by the frequency variation, and based on the eccentricity and the mass used in the specific device, the rest of the vibration parameters were defined in the trunk or branch. Subsequently, the location of the fruits and their characteristics conditioned their response in terms of acceleration, velocity and displacement. Fruit vibrated by ELWS received a frequency two to three times lower than the fruit vibrated by the CTS. However, considering that the vibrating time was four to six times higher, the fruit vibrated by CTS experienced more vibrating cycles. The fruit detachment process is facilitated by using long peak displacements, which require fewer cycles to achieve detachment [
18]. However, previous studies showed that these high displacements may cause slight damage when the fruit impacts nearby branches and fruit [
21,
22]. This fact could explain that more fruit are rubbed against the branches and other fruits during the vibration, and it would be responsible for the higher percentage of slightly damaged fruit registered in the case of the trees vibrated by ELWS compared to the trees vibrated by CTS.
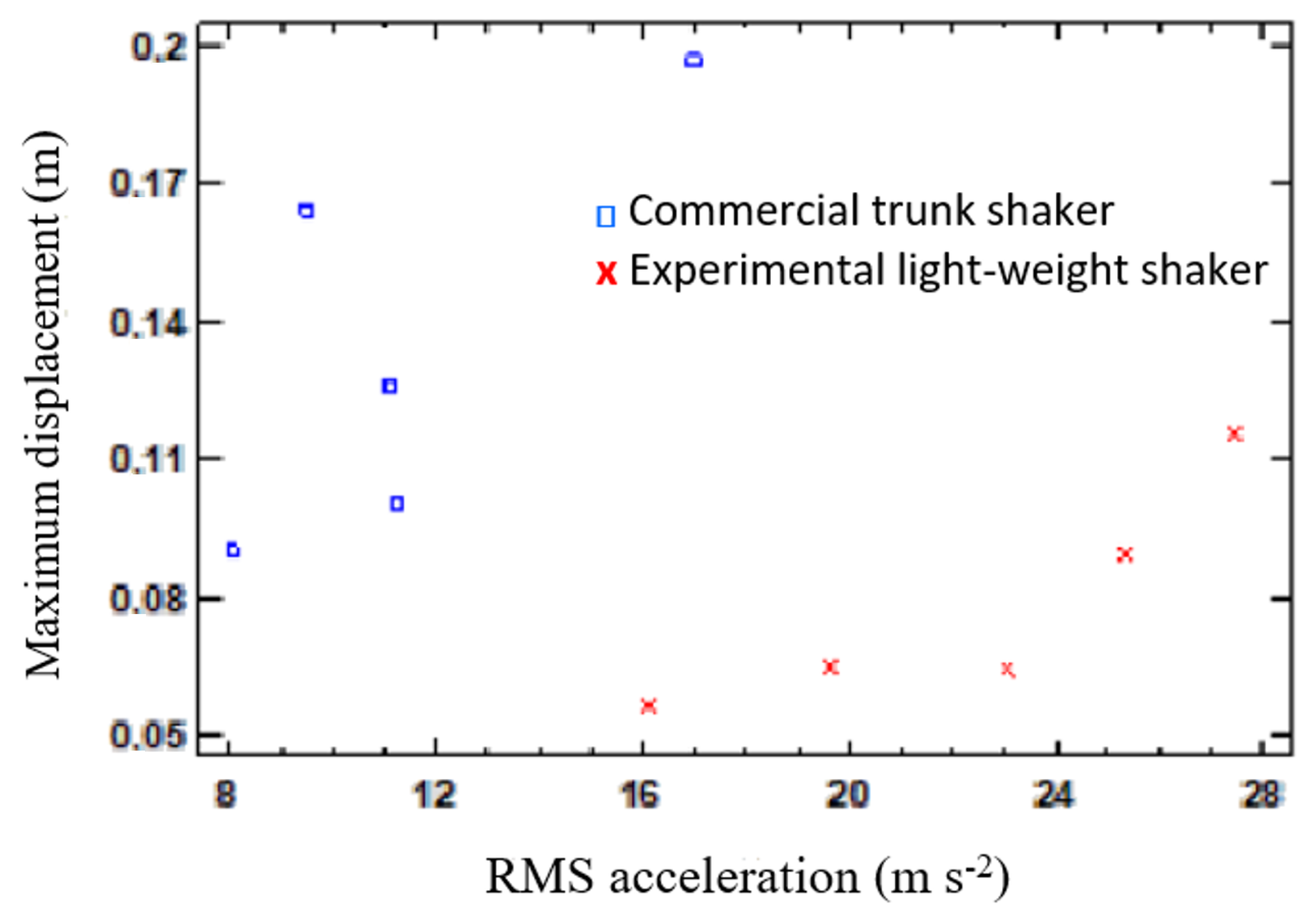
The harvesting systems tested showed high fruit RMS acceleration values, being higher in CTS (22.31 m s
−2) compared to ELWS (11.36 m s
−2). These values were lower than those recorded by [
8] when studying canopy shakers in citrus harvest for industry (frequency 4.1–4.9 Hz, and average values between 38.8 and 60.4 m s
−2). The use of higher frequency value allows to obtain higher acceleration values for the fruits. Working with citrus branches [
6] obtained an overall vibrational acceleration value 1.85 times higher when vibrating at 5 than at 2.5 Hz.
Increasing the acceleration in the canopy when using vibrators leads to better harvesting efficiency, [
17]. However, it also contributes to increase damage to other plant organs, such as shoots, leaves or flowers [
29]. In a study on the effect of frequency and amplitude on citrus tree vibration, [
1] showed that damage to tree branches can be reduced by 30% by using different combinations of frequency and displacement. The combination of frequency and displacement can be optimized to harvest different parts of the tree canopy and maintain high harvesting efficiency values with less damage to the branches. Acceleration in the canopy is influenced by the amplitude generated in the vibration applied. The possibility of performing vibration on main branches using ELWS has made it possible to reduce acceleration values in fruit to values significantly lower than CTS. Previous studies with CTS have shown how fruit drop is conditioned by the acceleration values. The significantly lower RMS acceleration in the case of the fruit vibrated by the ELWS could produce slightly damaged fruits (small cuts, rubbing and very small bruises) and not considerable damaged fruits (bruises and cut wounds).








{kind=link}
{kind=link}
{kind=link}
{kind=link}