1. Introduction
A combine harvester is a product with one of the most complex structures of all agricultural vehicles [
1]. The walking chassis is the core component of a combine harvester, which is installed with all the working devices to complete the functions of cutting, conveying, threshing, cleaning, grain gathering, smashing and spraying, but also needs to adapt to various operating environments, such as paddy or dry fields and slopes [
2,
3,
4]. However, vehicles are usually unable to maintain a level position when operated over uneven terrain, which frequently requires the driver to adjust the operating parameters to improve the harvester performance [
5,
6,
7].
The common walking systems, wheeled, crawler and wheeled-crawler combination structures, have been widely applied to various agricultural machines. Wheeled vehicles have a more flexible transfer performance when it comes to long-distance operations, owing to their excellent driving speed. However, compared with the crawler walking system, which integrates the outstanding advantages of large ground contact area, low ground pressure and strong ability to cross trenches and ridges [
8,
9,
10], wheeled vehicles can hardly adapt to operations on damp and soft ground. Thus, crawler structures have received increasing interest for the improvement of operation adaptability, and this type accounts for 70% of grain combine harvesters sold in China in 2019.
At present, the mainstream crawler combine harvesters in China mainly adopt the chassis with a welded structure, as shown in
Figure 1. As the chassis frame and walking devices on both sides are welded into a whole through multiple fixed beams, the structure strength of the chassis can be enhanced. However, such kind of structure limits the adjustment of the body posture, resulting in the following problems in the harvesting process: The characteristics of the paddy field in terms of soil viscosity, moisture content, mud foot depth and topographical level drop are greatly different so that the harvester is easy to tilt in the direction of lateral or longitudinal; Moreover, the fields in the southern part of China are mostly small and scattered with many ridges [
11]. When it comes to cross-regional operations and that have cross ridges, pits, or field transfers and loading, excessive change in vehicle inclination could make the harvester in major danger of tipping [
12,
13].
In recent years, the safety of agricultural vehicles driving in fields has attracted the attention of many experts. Dieumet et al. [
14] proposed an online adaptive observer. Terrain and vehicle parameters could be updated to take into account the effects of changes in the center of gravity height and total vehicle mass, on the basis of which it could successfully access and avoid rollover risk for agricultural vehicles when moving in terrain with important slopes. Farzaneh et al. [
15] investigated design and installation methods of Crush Protection Devices (CPDs) on a variety of all-terrain vehicles and evaluated the safety of the CPDs based on factors, such as shape, volume and installation height, to reduce the injury to operators from rollover accidents. In order to prevent rollover and maintain safe operations on unstructured terrain, Zhu et al. [
16] put forward a multi-sensor-based approach to the active attitude prediction of agricultural vehicles. The terrain information in front of the vehicle could be acquired through LiDAR, IMU and encoders, and then tire grounding points could be calculated by the combination of predicted vehicle position for vehicle attitude prediction (pitch and roll angles). Verification experiments proved that the above methods could improve the driving stability of agricultural vehicles to some extent; however, it is unavoidable for agriculture vehicles to encounter complex, uneven production roads. Therefore, it is of great significance to improve the adaptability of the vehicle body by implementing adaptive leveling.
Currently, vehicle leveling technology has received increasing interest from researchers. The active suspension of vehicles can adjust dynamically and adaptively according to the motion state and road condition of the vehicles and improve the trafficability by controlling the body height. Sarel et al. [
17] used slow active suspension control to reduce body roll so as to reduce the possibility of rollover tendency in the case of lane change and sudden change in vehicle conditions. Sun et al. [
18] controlled the vehicle height by fuzzy sliding mode controller (FSMC) and adjusted the vehicle’s heeling and pitch angle through the EAS system, which effectively guaranteed the vehicle height adjustment performance. In the field of special vehicles, the Mars rover Zhurong designed by Pan et al. [
19] realized the functions of peristaltic wheel walking and horizontal lifting of the vehicle body by using the active suspension system, which solves the problems of a low climbing angle of the planetary vehicle mobile system in soft terrain. Sun et al. [
20] studied a posture adjustment mechanism based on a parallel four-bar mechanism, and key components were analyzed in ANSYS software to meet strength requirements, while it could only complete the lateral level. Edlund et al. [
21] designed a new type of bogie to level the operating components to improve the ability of forestry vehicles when traveling on rugged and soft soils.
In addition, research has been carried out on the leveling technology of wheeled combine harvesters by famous agricultural production companies that pose questions about the feasibility of application in crawler vehicles due to the completely different structures between the two walking systems. The wheeled combine harvester produced by the John Deer Company adopted an electro-hydraulic automatic leveling system to achieve vehicle leveling by controlling the break-make of the fuel supply circuit [
22]. The AL QUATTRO EVO wheeled wheat harvester [
23] produced by the LAVERDA Company can achieve horizontal leveling with a slope less than 21.8° and vertical leveling with a slope less than 16.7°. The combine harvester designed by the CASE IH Company can monitor grain conditions and operation information in real-time and automatically adjust working parts according to field operations [
24]. In particular, the vertical uphill and downhill capacity of Fendt 5275 CSL and New Holland CH7.70 combine harvesters can be as high as 35% and 18%, respectively, showing an excellent ability to climb over extreme slopes [
25,
26].
According to the literature, leveling technology plays a key role in guaranteeing the working stability of agricultural vehicles. However, current research mainly focuses on wheeled vehicles, and there are a few methods of adjusting the chassis of crawler combine harvesters, so the objective of this study is to put forward an adaptive leveling system for combine harvesters based on a new four-point lifting adjustable crawler chassis. The working principle was verified by analyzing the posture adjustment process in a RecurDyn environment, and the required adjustment information of each driving hydraulic cylinder could be calculated through established mathematical models. After the whole adaptive leveling system was integrated into the prototype, the experiment was then carried out.
3. Analysis of Attitude Adjustment Mechanism
In order to verify the feasibility of the attitude adjustment mechanism, the working principle is analyzed by simulating the adjustment process under multiple conditions. The virtual prototype simulation model is established in SolidWorks Software (Dassault Systemes S.A, Waltham, MA, USA), imported to a RecurDyn environment (FunctionBay, Seoul, Korea) [
27]. The corresponding simulation parameters are set for the adjusting working conditions.
3.1. Simulation Conditions
Appropriate constraints are set between the mechanism connections, and the key components are hinged, so it is set as RevJoint. The connection between the hydraulic cylinder and the piston rod is cylindrical. A total of 24 RevJoint and 4 cylinder joints are set between these components. When the vehicle is conducting lateral adjustment, the walking device will also roll to a certain extent. Therefore, when simulating this working condition, round steel is set under the walking beam on both sides and the Fixed joint is set, and a RevJoint joint is set between the round steel and ground.
(1) When the chassis frame conducts the overall horizontal lifting adjustment and longitudinal tilting adjustment, the actions of the hydraulic cylinder on both sides are the same. Front and rear hydraulic cylinders could have the same driving function, respectively, therefore, the two working conditions are combined and the following driving function is added: Front hydraulic cylinders: STEP (TIME, 0, 0, 5, 70); Rear hydraulic cylinders: STEP (TIME, 0, 0, 5, 0) + STEP (TIME, 5, 0, 10, 30) + STEP (TIME, 10, 0, 15, −80) + STEP (TIME, 15, 0, 20, 50). In addition, the longitudinal adjustment range could change to a small extent as the vehicle height changes. Thus, adding the following functions under the condition that the vehicle height maintains the lowest position. Front hydraulic cylinders: STEP (TIME, 0, 0, 5, 0); Rear hydraulic cylinders: STEP (TIME, 0, 0, 5, 30) + STEP (TIME, 5, 0, 10, −80) + STEP (TIME, 10, 0, 15, 50).
(2) When the chassis frame is adjusted for lateral tilt, the left front hydraulic cylinder and the right front hydraulic cylinder do not participate in the execution of the action but only adjust the left rear hydraulic cylinder and the right rear hydraulic cylinder. Therefore, the following driving functions are added to the simulation analysis: Left front hydraulic cylinder: STEP (TIME, 0, 0, 5, 0); Right front hydraulic cylinder: STEP (TIME, 0, 0, 5, 70); Left rear and right rear hydraulic cylinders: STEP (TIME, 0, 0, 5, 0).
3.2. Simulation Results and Analysis
When the overall lifting and pitching of the chassis is adjusted (the forward tilting of the chassis in the simulation is shown in
Figure 9a), points
B and
M can reflect the changes in the lifting height and pitching tilt angle of the chassis.
Figure 9b shows the displacement of the hydraulic cylinder;
Figure 9c shows the displacement change in point
B and point
M in the Y-direction;
Figure 9d shows the change in longitudinal inclination.
From 0 to 5 s time, the front hydraulic cylinder extends 70 mm, while the rear hydraulic cylinder remains the same. The tracks of point B and point M coincide together, and the chassis is lifted 87.8 mm synchronously without longitudinal inclination, indicating that the chassis is lifted 87.8 mm as a whole during this period; In 5–10 s, the front hydraulic cylinder remains the same, and the rear hydraulic cylinder shrinks by 30 mm. Point B is always higher than point M, indicating that the chassis tilts backward (high in the front and low in the rear), and the maximum tilting adjustment angle is −2.4° at c of 10 s; Within 10–15 s, the rear hydraulic cylinder extends 80 mm. When the elongation is 30 mm, point B and point M overlap at a, and the chassis is horizontal at that moment. After, point M is higher than point B, and the chassis tilts forward (low in the front and high in the back). At the d of 15 s, the maximum forward inclination adjustment angle is 5.2°. From 15 to 20 s, the rear hydraulic cylinder shrinks by 50 mm, point B and point M gradually approach and overlap at b, and the chassis is gradually leveled. The above analysis shows that the adjustment of the front hydraulic cylinder can achieve the overall lifting, and the rear hydraulic cylinder can realize the longitudinal leveling, which is consistent with the theoretical design.
When the chassis is at the lowest position for longitudinal adjustment,
Figure 10a shows the displacement of points
B and
M in the Y-direction, and
Figure 10b shows the displacement of the rear hydraulic cylinder and the change in the longitudinal inclination.
During the first 5 s, the rear hydraulic cylinders on both sides shrink by 30 mm at the same time, and point B is always higher than point M, indicating that the frame is tilted to the rear; the maximum retroversion angle is −2.9°. The vehicle body is leveled for the first time between 5 and 7 s, and starting from 7 s, the rear hydraulic cylinders on both sides extend 50 mm at the same time. During this period, point B is always lower than point M, indicating that the vehicle body is inclined to the front side, reaching the maximum forward inclination angle of 5.0° in 10 s. Between 10 and 15 s, the vehicle body is leveled for the second time until 15 s, the hydraulic cylinders on both sides contract to the initial stage, and the vehicle is level again.
When conducting lateral tilt adjustment (
Figure 11a shows the left tilt of the chassis in the simulation), point
B on one side is lifted so that point
B can reflect the change in the lateral tilting angle.
Figure 11b shows the variation curve of various parameters in the simulation results. From 0 to 5 s, the right front hydraulic cylinder gradually extends 70 mm, point
B is raised by 87.8 mm and the maximum lateral adjustment angle of 3.98° is reached. The simulation verified that by adjusting the front hydraulic cylinder on one side, the lateral tilt adjustment of the vehicle can be achieved.
Based on the above analysis, the lateral tilt leveling can be achieved by controlling the front hydraulic cylinder on one side alone, the overall lifting can be achieved by adjusting the front hydraulic cylinder on both sides at the same time, and the longitudinal tilting leveling can be realized by adjusting the rear hydraulic cylinders. Only the same hydraulic cylinder is needed for each condition adjustment (i.e., adjusting the front cylinder or rear cylinder), which is beneficial to simplify the action of automatic control. However, when the displacement of both sides of the front hydraulic cylinder is inconsistent, the longitudinal tilt leveling should not be carried out.
4. Experiment and Discussion
In order to determine the feasibility of applying the adaptive leveling system to a combine harvester, the prototype, including a four-point lifting crawler chassis and control system, was integrated into the 4LZ-6.0 combine harvester (
Figure 12) produced by World Agricultural Machinery Co., Ltd. (Zhenjiang, China).
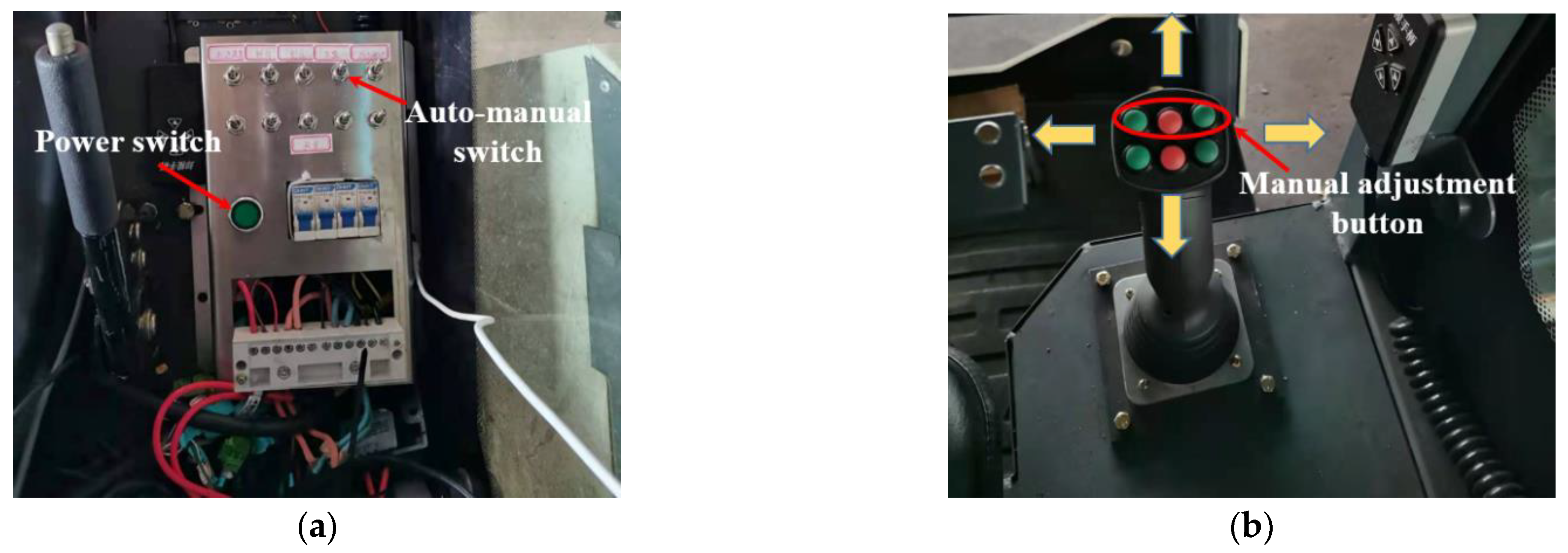
Leveling performance was tested under multiple conditions in Wujiang National Modern Agricultural Industrial Park (Suzhou, China) during December 2020. The CAN analysis recorder (Model: CANalyst-II, Chuangxin Technology Co., Ltd., Zhuhai, China) was used to record data, including vehicle inclination and displacement of hydraulic cylinders, saved as TXT file format. The controller was directly connected to the recorder, which can transmit four signals in a single experiment, and can realize horizontal leveling (two front hydraulic cylinder signals and Y-direction inclination signal) or the recording of related data in longitudinal leveling (two rear hydraulic cylinder signals and X-direction inclination signal).
The experiment started when the chassis was in the lowest level position, we manually adjusted the vehicle to the extreme left tilting state and then turned on the automatic leveling switch.
Figure 13a shows the auto-leveling process, and
Figure 13c shows the horizontal leveling test diagram. Within the first 1.5 s, the attitude sensor detected the vehicle’s inclination state, and the required adjustment displacement of the hydraulic cylinder was calculated. After measuring, control of the opening of the proportional valve where the corresponding hydraulic cylinder was located. Since the vehicle tilts to the left by the extension of the right front hydraulic cylinder, the extension of the hydraulic cylinder was at its maximum limit at 0 s, and the vehicle was tilted to the left by about 4.25°. Within 5 s, the front right hydraulic cylinder gradually contracted, and the lateral inclination angle of the vehicle body also gradually decreased. After about 6.5 s, the hydraulic cylinder contracted to the initial shortest state, at which time the vehicle remained horizontal.
When the chassis was in the lowest level position, we manually adjusted the body to any right tilt state, then turned on the automatic leveling switch.
Figure 13b shows its automatic leveling process. After the automatic leveling was turned on, the control system detected the current vehicle inclination state through the attitude sensor and judged that the vehicle was tilted to the right by −2.20° at this moment. After the required adjustment of the hydraulic cylinder was obtained and the corresponding proportional valve was controlled to open, the vehicle body started to level after about 1.8 s. At 2.7 s, the left front hydraulic cylinder gradually shrunk, and the body gradually became horizontal. After about 4.4 s, the left front hydraulic cylinder retracted from the extended 33.8 mm to the initial position. At this time, the lateral tilt was −0.25°, and the body remained basically level.
After the whole chassis was raised about 40 mm, the longitudinal leveling test of the vehicle body was then carried out, as shown in
Figure 14a for the longitudinal leveling process. First, we manually adjusted the body to the limit state of forward tilt, as shown in
Figure 14b, and turned on the automatic leveling switch. At 1.8 s, the body started to level, and the rear hydraulic cylinder gradually shrunk from the extended 50 mm state. After 6.5 s, the hydraulic cylinder shrunk back to the initial position, and the longitudinal direction of the body remained basically horizontal. After an interval of about 10 s, we manually adjusted the body to any position of backward tilt and then turned on the automatic leveling switch. In order to facilitate the distinction of data, we turned on the automatic leveling switch after another interval of about 10 s. The control system detects that the vehicle tilted to the rear about 1.95° at this time, the hydraulic cylinder gradually extended 22.21 mm to the initial position within 2 s, and the vehicle was leveled longitudinally again.
From the above analysis, it can be seen that the designed crawler four-point lifting chassis structure can adjust its posture, realize the lateral and longitudinal adjustment of the vehicle body and each adjustment action is consistent with the theoretical analysis and simulation results. Since the engine power of the harvester is at the maximum in the leveling test, the body will vibrate to varying degrees, and the value detected by the attitude sensor will fluctuate in a very small range, but the leveling system can also accurately collect the tilt state of the body and realize the adjustment level. In addition, due to processing and assembly errors, clearance will exist between the hinged parts, but the accuracy of body leveling can be maintained within ±0.4°. Compared with the current leveling methods, the designed adaptive leveling system based on a four-point lifting adjustable crawler chassis can meet the leveling requirement of crawler agricultural machinery or engineering machinery.
5. Conclusions
A new adaptive leveling system for combine harvester has been developed on the basis of the proposed attitude adjustable crawler chassis, which could guarantee the vehicles and platforms in a level position when operated over rough terrain, and, therefore, able to adapt to multiple operating conditions. The attitude adjustment of the chassis depends on a four-point lifting adjustable mechanism, which could be conveniently applied to crawler vehicles to prevent rollover accidents and improve operational performance.
In this study, the working principle of the attitude adjustment mechanism has been analyzed based on the virtual prototype model in a RecurDyn environment. The adjustment process under different posture conditions has been simulated, and the results prove the feasibility of this method. In order to provide the adaptive leveling system with the calculation formulas for adjusting the displacement of hydraulic cylinders, the mathematical models between vehicle attitude and the working state of hydraulic cylinders have been established separately. From the analysis, the maximum adjustment range of vehicle height could be 0–87.8 mm, the lateral inclination adjustment range could be ±3.98° and the longitudinal inclination could be −2.9–5.2°.
The adaptive leveling experiment showed that the variation of real adjusting parameters was consistent with the simulation and theoretical analysis, including the hydraulic cylinder displacement and vehicle attitude. During the test conditions, the leveling system could achieve automatic leveling with an accuracy of ±0.4°. Therefore, the leveling method proposed in this article could be valuable for technical reference of crawler vehicle leveling.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













