
Design and Testing of an Intelligent Multi-Functional Seedling Transplanting System
Abstract
:1. Introduction
2. All-in-One Machine System Design
2.1. Trays and Seedings
2.2. Overall Scheme
2.3. Key Systematic Design Method
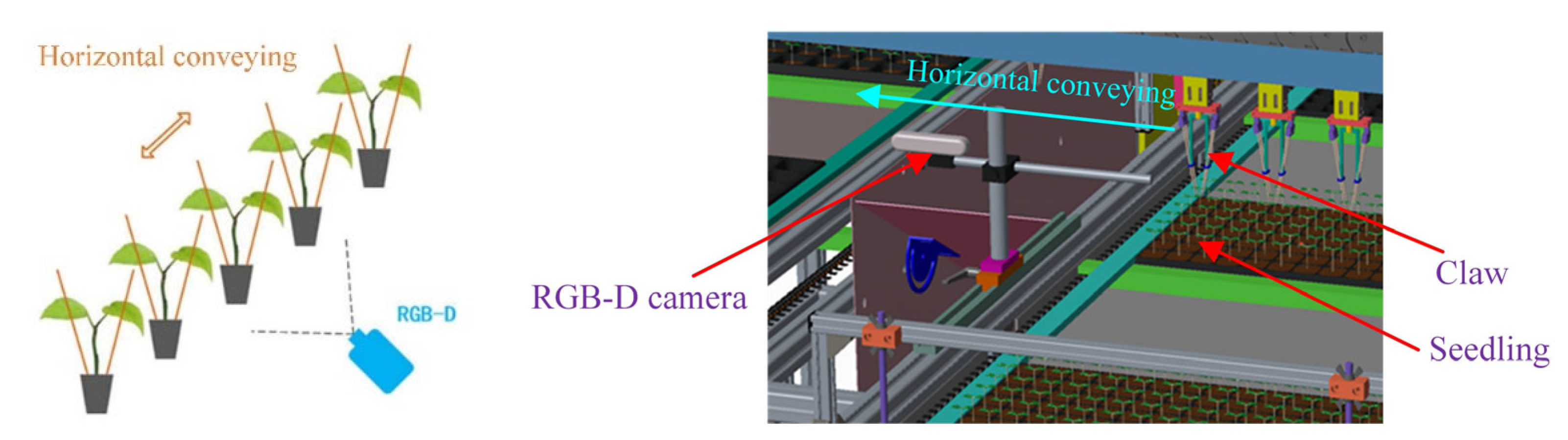
2.3.1. Dynamic Detection of Seedling Transport
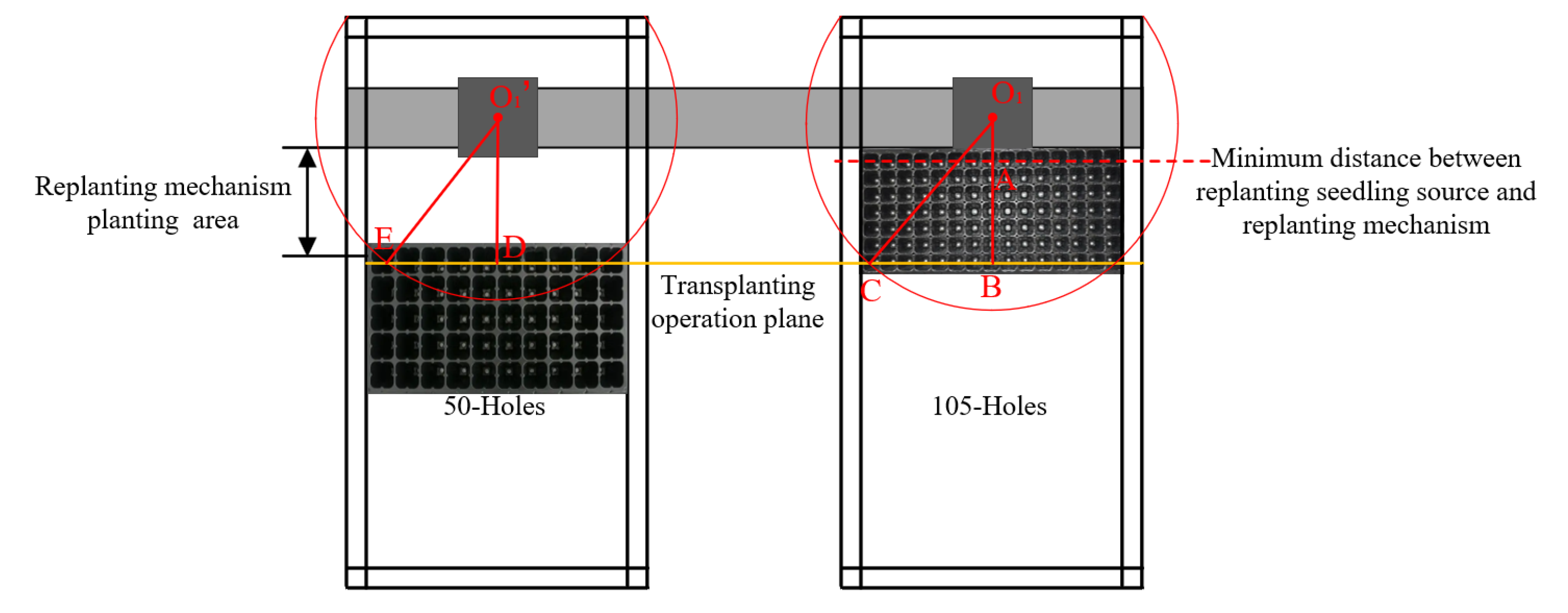
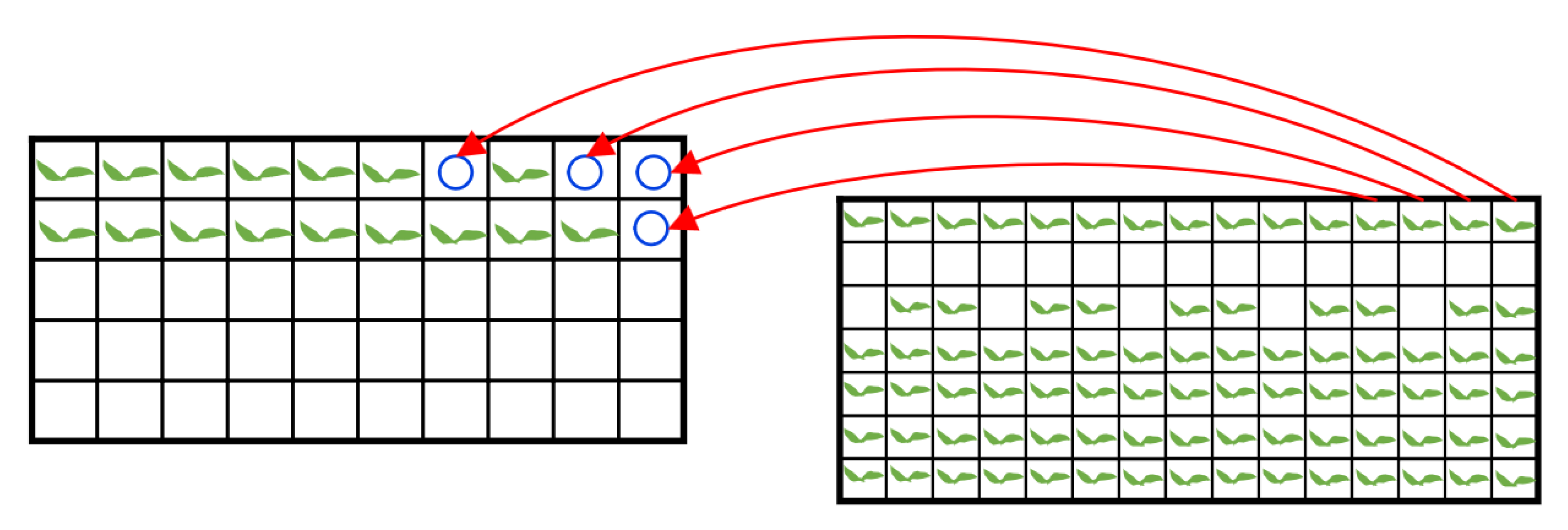
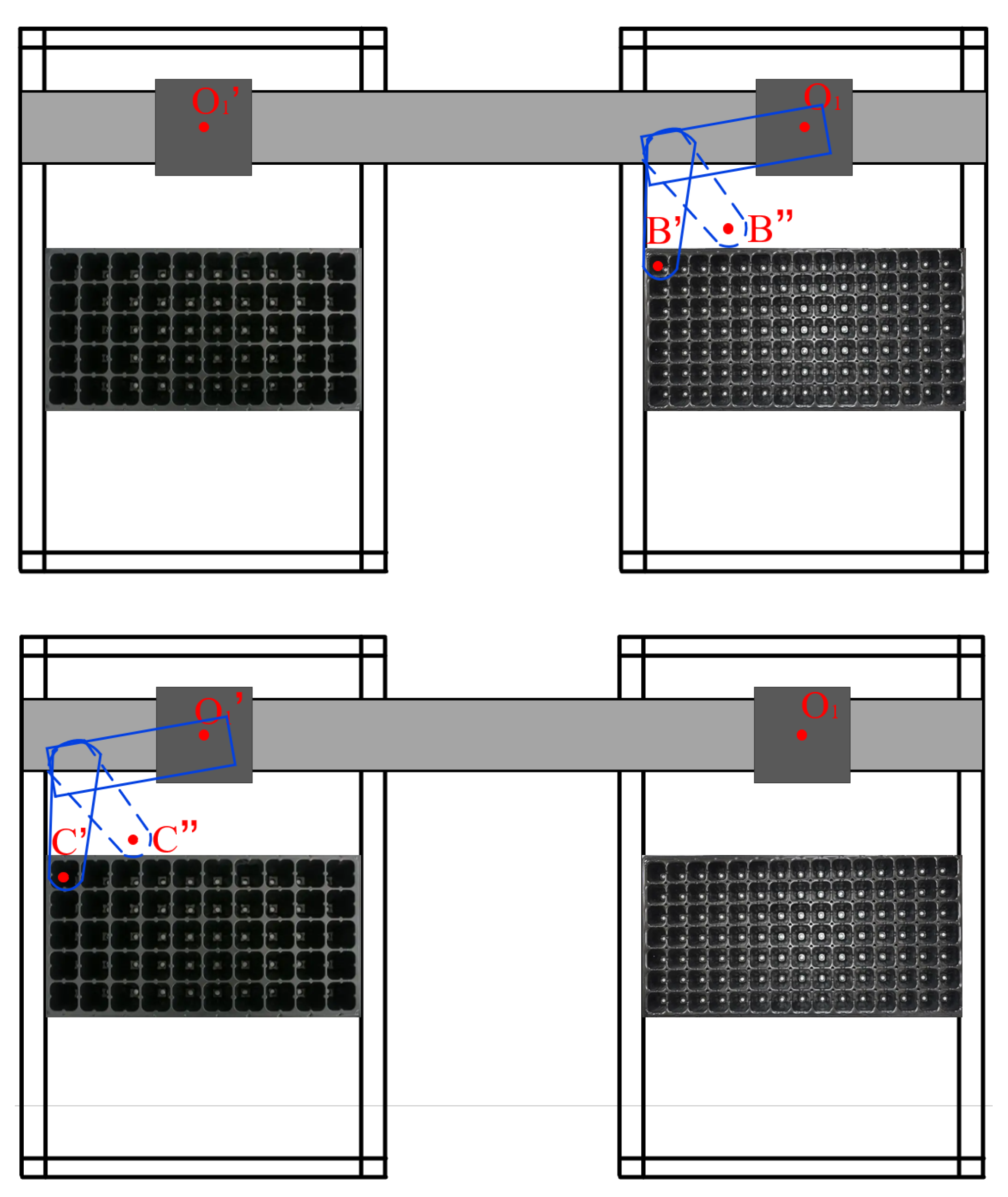
2.3.2. Seedling Transplant–Replant from Same Tray
2.4. Key Mechanism Design
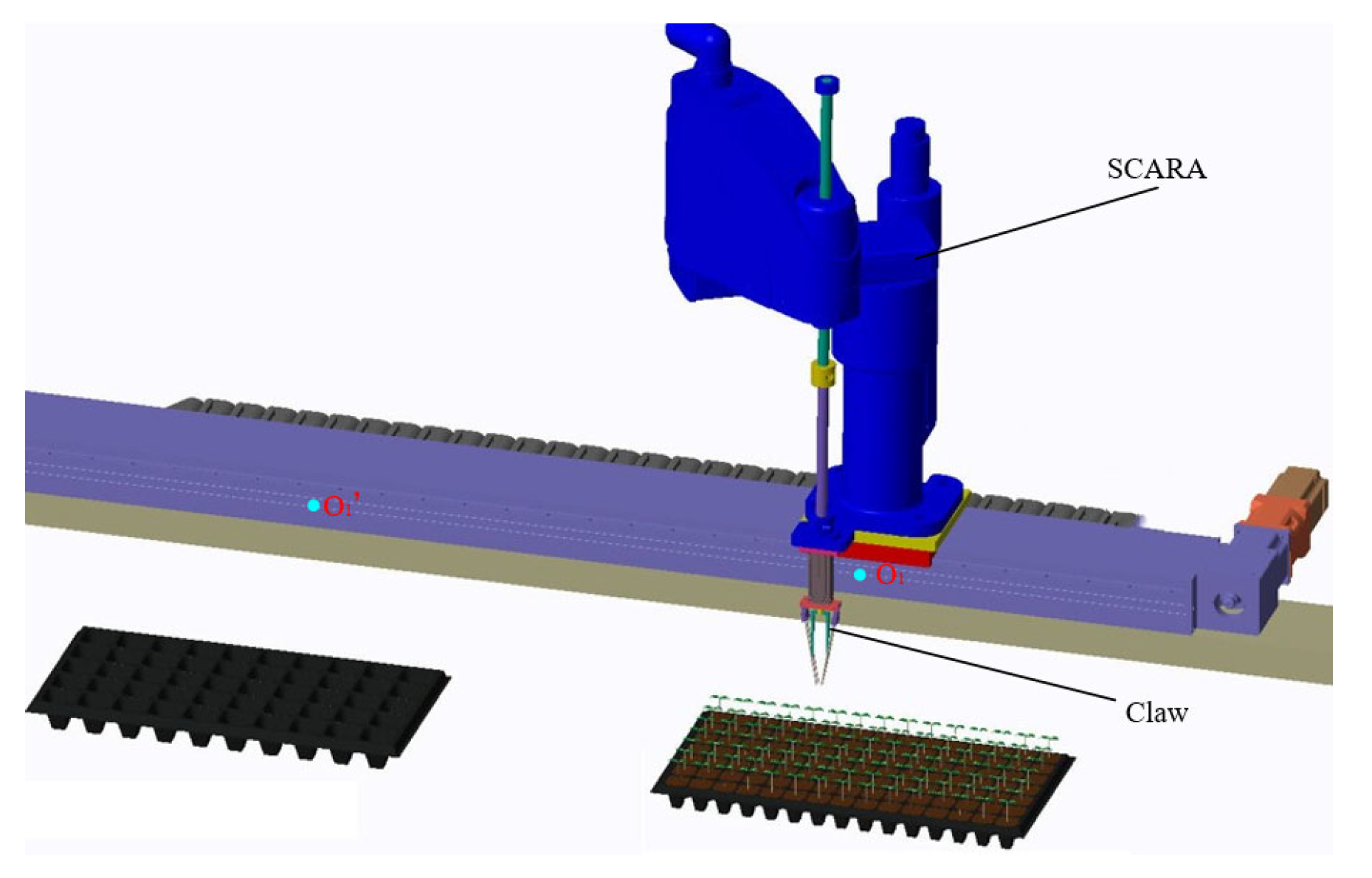
2.4.1. Multi-Claw Transplanting Mechanism
2.4.2. Single-Claw Replanting Mechanism
3. Control Strategy Design
3.1. Seedling Sequence for Transplanting–Replanting
3.2. Synergistic Control of Sort–Transplant–Replant
3.3. Control System and Operation Process
4. Results and Discussion
4.1. Experimental Method
4.2. Results
5. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mohanta, S.; Dalai, S.; Sahu, B. Nursery Raising for Vegetables and Flowers in Greenhouse. In Protected Cultivation and Smart Agriculture; Maitra, S., Gaikwad, D.J., Shankar, T., Eds.; New Delhi Publishers: New Delhi, India, 2020; pp. 87–95. [Google Scholar]
- Shamshiri, R.; Kalantari, F.; Ting, K.; Thorp, K.R.; Hameed, I.A.; Weltzien, C.; Ahmad, D.; Shad, Z.M. Advances in greenhouse automation and controlled environment agriculture: A transition to plant factories and urban agriculture. Int. J. Agric. Biol. Eng. 2018, 11, 1–22. [Google Scholar] [CrossRef]
- Blackmore, S.; Stout, B.; Wang, M.; Runov, B. Robotic agriculture—The future of agricultural mechanisation? In Proceedings of the 5th European Conference on Precision Agriculture, Uppsala, Sweden, 9–12 June 2005; pp. 621–628. [Google Scholar]
- Feng, Q.; Wang, X.; Jiang, K.; Zhou, J.; Zhang, R.; Ma, W. Design and test of key parts on automatic transplanter for flower seedling. Trans. Chin. Soc. Agric. Eng. 2013, 29, 21–27. [Google Scholar]
- Jiang, Z.; Hu, Y.; Jiang, H.; Tong, J. Design and optimization of end-effector for automatic plug seedling transplanter in greenhouses. In Proceedings of the 2015 ASABE Annual International Meeting, New Orleans, LA, USA, 26–29 July 2015; p. 1. [Google Scholar]
- Brewer, H. Conceptual modeling automated seedling transfer from growing trays to shipping modules. Trans. ASABE 1994, 37, 1043–1051. [Google Scholar] [CrossRef]
- Ting, K.C.; Giacomelli, G.; Ling, P. Workability and productivity of robotic plug transplanting workcell. Vitr. Cell. Dev. Biol.-Plant 1992, 28, 5–10. [Google Scholar] [CrossRef]
- Hůla, P.; Šindelář, R.; Trinkl, A. Verification of applicability of ABB robots for trans-planting seedlings in greenhouses. Res. Agric. Eng. 2008, 54, 155. [Google Scholar] [CrossRef] [Green Version]
- Fei, Q.; Xinqun, Z.; Yuefeng, Z. Development of world greenhouse equipment and technology and some implications to China. Trans. Chin. Soc. Agric. Eng. 2008, 24, 279–285. [Google Scholar]
- Gu, S.; Yang, Y.; Zhang, Y.; Qiao, X. Development status of automated equipment systems for greenhouse vegetable seedlings production in Netherlands and its inspiration for China. Trans. Chin. Soc. Agric. Eng. 2013, 29, 185–194. [Google Scholar]
- Kang, D.-H.; Kim, D.-E.; Lee, G.-I.; Kim, Y.-H.; Lee, H.-J.; Min, Y.-B. Development of a vegetable transplanting robot. J. Biosyst. Eng. 2012, 37, 201–208. [Google Scholar] [CrossRef] [Green Version]
- Ndawula, I.; Assal, S.F. Conceptual design and kinematic analysis of a novel open field 3dof multi-gripper pot seedlings transplanting robot. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; pp. 1458–1463. [Google Scholar]
- Tian, S.; Wang, Z.; Yang, J.; Huang, Z.; Wang, R.; Wang, L.; Dong, J. Development of an automatic visual grading system for grafting seedlings. Adv. Mech. Eng. 2017, 9. [Google Scholar] [CrossRef]
- Qizhi, Y.; Mengtao, S.; Jing, C.; Xinyi, S.; Hanping, M.; Jun, G. Kinematic Error Analysis and Test of High-speed Plug Seeding Transplanting Machine for Greenhouse Based on Parallel Mechanism. Trans. Chin. Soc. Agric. Mach. 2018, 49, 18–27. [Google Scholar]
- Jiang, H.; Ren, Y. Machine vision for automatic seedling transplanting. In Proceedings of the ASABE Annual International Meeting, Minneapolis, MN, USA, 17–20 June 2007. [Google Scholar]
- Zhang, W.; Li, W.; Yang, Z.; Han, J. Height information acquisition method of seedling with machine vision. In Proceedings of the 2015 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Shenyang, China, 8–12 June 2015; pp. 1446–1449. [Google Scholar]
- Hu, J.; Yan, X.; Ma, J.; Qi, C.; Francis, K.; Mao, H. Dimensional synthesis and kinematics simulation of a high-speed plug seedling transplanting robot. Comput. Electron. Agric. 2014, 107, 64–72. [Google Scholar] [CrossRef]
- Tong, J.; Jiang, H.; Zhou, W. Development of automatic system for the seedling transplanter based on machine vision technology. In Proceedings of the 2012 IEEE International Conference on Computer Science and Automation Engineering (CSAE), Zhangjiajie, China, 25–27 May 2012; pp. 742–746. [Google Scholar]
- Choi, W.C.; Kim, D.C.; Ryu, I.H.; Kim, K.U. Development of a seedling pick-up device for vegetable transplanters. Trans. ASABE 2002, 45, 13. [Google Scholar]
- de Medeiros, A.D.; Capobiango, N.P.; da Silva, J.M.; da Silva, L.J.; da Silva, C.B.; dos Santos Dias, D.C.F. Interactive machine learning for soybean seed and seedling quality classification. Sci. Rep. 2020, 10, 11267. [Google Scholar] [CrossRef]
- Otoya, P.E.L.; Gardini, S.R.P. A machine vision system based on RGB-D image analysis for the artichoke seedling grading automation according to leaf area. In Proceedings of the 2021 IEEE 3rd Eurasia Conference on IOT, Communication and Engineering (ECICE), Yunlin, Taiwan, 29–31 October 2021; pp. 176–181. [Google Scholar]
- Feng, Q.; Zhao, C.; Jiang, K.; Fan, P.; Wang, X.; Engineering, B. Design and test of tray-seedling sorting transplanter. Int. J. Agric. Biol. Eng. 2015, 8, 14–20. [Google Scholar]
- Tong, J.; Shi, H.; Wu, C.; Jiang, H.; Yang, T. Skewness correction and quality evaluation of plug seedling images based on Canny operator and Hough transform. Comput. Electron. Agric. 2018, 155, 461–472. [Google Scholar] [CrossRef]
- Jiang, H.; Shi, J.; Ren, Y.; Ying, Y. Application of machine vision on automatic seedling transplanting. Trans. Chin. Soc. Agric. Eng. 2009, 25, 127–131. [Google Scholar]
- Jin, X.; Li, R.; Tang, Q.; Wu, J.; Jiang, L.; Wu, C. Low-damage transplanting method for leafy vegetable seedlings based on machine vision. Biosyst. Eng. 2022, 220, 159–171. [Google Scholar] [CrossRef]
- Syed, T.N.; Jizhan, L.; Xin, Z.; Shengyi, Z.; Yan, Y.; Mohamed, S.H.A.; Lakhiar, I.A. Seedling-lump integrated non-destructive monitoring for automatic transplanting with Intel RealSense depth camera. Artif. Intell. Agric. 2019, 3, 18–32. [Google Scholar] [CrossRef]
- Tong, J.H.; Li, J.B.; Jiang, H.Y. Machine vision techniques for the evaluation of seedling quality based on leaf area. Biosyst. Eng. 2013, 115, 369–379. [Google Scholar] [CrossRef]
- Zhang, L.; Tan, Y.; Lyu, H.; Li, B.; Jiang, Y.; Wang, S. Optimization of automatic transplanting path for plug seedlings in greenhouse. Trans. CSAE 2020, 36, 65–72. [Google Scholar]
- Yu, H.; Zhang, T.; Yang, L. Automatic transplanting machine research and development prospects. Agric. Mach. 2008, 20, 44–45. [Google Scholar]
- Zhang, X.; Liu, W.; Cheng, C.; Cai, F.; Wang, Y.; Zhou, X. Development and Application of Intelligent Transplanting Machine for Plug Seedlings in Greenhouse; Chinese Society of Agricultural Engineering: Beijing, China, 2011. [Google Scholar]
- Han, L.; Mao, H.; Kumi, F.; Hu, J. Development of a multi-task robotic transplanting workcell for greenhouse seedlings. Appl. Eng. Agric. 2018, 34, 335–342. [Google Scholar] [CrossRef]
- Tong, J.; Yu, J.; Wu, C.; Yu, G.; Du, X.; Shi, H. Health information acquisition and position calculation of plug seedling in greenhouse seedling bed. Comput. Electron. Agric. 2021, 185, 106146. [Google Scholar] [CrossRef]
- Zeng, J.; Xu, G.; Xu, Y.; Cui, Y.; Zhao, Y.; Xiao, J. Time series based method for classification of plug seedlings. In Proceedings of the 3rd International Conference on Information Science, Parallel and Distributed Systems (ISPDS), Guangzhou, China, 22–24 July 2022; pp. 122–126. [Google Scholar]
- Tong, J.; Jiang, H.; Wu, C. Optimization of seedlings lower density transplanting path based on greedy algorithm. Trans. Chin. Soc. Agric. Mach. 2016, 47, 8–13. [Google Scholar]
- He, L.; Yang, T.; Chuan, Y.; Yu, Y.; Tong, J.; Chen, C. Optimization of Replugging Tour Planning Based on Greedy Genetic Algorithm. Trans. Chin. Soc. Agric. Mach. 2017, 48, 36–43. [Google Scholar]
- Xu, W.; Li, C. Research on cucumber nursery technology in enclosed plant factories. China South. Agric. Mach. 2022, 3, 25–27, 31. [Google Scholar]
- LY/T 2234-2013; Forestry Machinery—Forestry Industrialized Seedling Nursery—Seedlings Nursery Plug. Standards Press of China: Beijing, China, 2014.
- Han, L. Mechanical Analysis of the Root Lumps and Development of a Robotic Transplanter Vegetable Plug Seedings; Jiangsu University: Zhenjiang, China, 2014. [Google Scholar]
- Tian, Z.; Ma, W.; Yang, Q.; Yao, S.; Zhang, M.; Duan, F.; Xu, H. Research status and problem analysis of plug seedling transplanter in greenhouse. J. China Agric. Univ. 2022, 27, 22–38. [Google Scholar]
- Xia, C.; Hwang, Y.; Lee, D.-H.; Lee, J.; Lee, M.-C. Three-dimensional plant leaf mapping and segmentation using kinect camera. In Proceedings of the Society of Instrument and Control Engineers of Japan (SICE), 2015 54th Annual Conference, Hangzhou, China, 28–30 July 2015. [Google Scholar]
- Li, D.; Xu, L.; Tan, C.; Goodman, E.D.; Fu, D.; Xin, L. Digitization and visualization of greenhouse tomato plants in indoor environments. Sensors 2015, 15, 4019–4051. [Google Scholar] [CrossRef]
- Zhao, S.; Liu, J.; Zhou, X. Design and Experiment of Portable Greenhouse Transplanting Machine. J. Agric. Mech. Res. 2020, 42, 51–57. [Google Scholar]
- Gujarati, A.; Wattoo, Z.S.; Aliabadi, M.R.; Clark, S.; Liu, X.; Shiri, P.; Trivedi, A.; Zhu, R.; Hein, J.; Seltzer, M. Arming IDS Researchers with a Robotic Arm Dataset. In Proceedings of the 2022 52nd Annual IEEE/IFIP International Conference on Dependable Systems and Networks (DSN), Baltimore, MD, USA, 37–30 June 2022; pp. 101–108. [Google Scholar]
- Wang, L. Mechanism Design and Transplanting Moving Platform Research of Greenhouse Seedling Transplanting Machine; Jiangsu University: Zhenjiang, China, 2016. [Google Scholar]
- Tong, J.; Meng, Q.; Gu, S.; Wu, C.; Ma, K. Design and experiment of high-speed sparse transplanting mechanism for hydroponics pot seedlings in greenhouses. Trans. Chin. Soc. Agric. Eng. 2021, 37, 1–9. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Size L × W/mm | Center Distance M × N/mm | Hole Depth H/mm | Upper Port A × B/mm | Lower Port C × D/mm |
|---|---|---|---|---|---|
| 105-hole | 540 × 270 | 34 ×34 | 39 | 31.5 × 33 | 13 × 15 |
| 50-hole | 540 × 280 | 51 × 51 | 47 | 46.5 × 46.5 | 19 × 19 |
| Number/ Indicator | N | a | b | c | d | e | η1(%) | η2(%) | η3(%) | η4(%) |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 50 | 1 | 4 | 1 | 0 | 6 | 97.78 | 100 | 88 | 100 |
| 2 | 50 | 0 | 2 | 0 | 2 | 4 | 95.83 | 100 | 92 | 100 |
| 3 | 50 | 2 | 2 | 1 | 2 | 6 | 93.48 | 85.71 | 86 | 98 |
| Average | 50 | 1 | 2.67 | 0.67 | 1.33 | 5.33 | 95.7 | 95.24 | 88.67 | 99.33 |
| Number/ Indicator | N | a | b | c | d | e | η1(%) | η2(%) | η3(%) | η4(%) |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 50 | 1 | 2 | 0 | 0 | 3 | 100 | 100 | 94 | 100 |
| 2 | 50 | 2 | 2 | 1 | 1 | 5 | 95.65 | 83.33 | 88 | 98 |
| 3 | 50 | 1 | 3 | 0 | 2 | 5 | 95.65 | 100 | 88 | 100 |
| Average | 50 | 1.33 | 2.33 | 0.33 | 1 | 4.33 | 97.1 | 94.44 | 90 | 99.33 |
| Number/ Indicator | N | a | b | c | d | e | η1(%) | η2(%) | η3(%) | η4(%) |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 50 | 0 | 1 | 1 | 1 | 3 | 95.92 | 100 | 94 | 100 |
| 2 | 50 | 2 | 1 | 1 | 2 | 4 | 93.62 | 66.67 | 88 | 96 |
| 3 | 50 | 0 | 3 | 2 | 1 | 4 | 93.62 | 83.33 | 88 | 96 |
| Average | 50 | 0.67 | 1.67 | 1.33 | 1.33 | 3.67 | 94.39 | 83.33 | 90 | 97.33 |
| Author | Machine | Efficiency (Plants/Hour) | Success Rate (%) | Function |
|---|---|---|---|---|
| Kang et al. [11] |  | 2000 | 99 | Transplanting |
| Han [38] |  | 1200 | 93.87 | Transplanting |
| Wang [44] |  | 900 | 90.23 | Transplanting |
| Tong et al. [45] |  | 3956 | 96.7 | Transplanting |
| Feng et al. [22] |  | 700 | 90 | Transplanting and Sorting |
| Our machine |  | 5000 | 99.33 | Transplanting, Sorting, and Replanting |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, S.; Liu, J.; Jin, Y.; Bai, Z.; Liu, J.; Zhou, X. Design and Testing of an Intelligent Multi-Functional Seedling Transplanting System. Agronomy 2022, 12, 2683. https://doi.org/10.3390/agronomy12112683
Zhao S, Liu J, Jin Y, Bai Z, Liu J, Zhou X. Design and Testing of an Intelligent Multi-Functional Seedling Transplanting System. Agronomy. 2022; 12(11):2683. https://doi.org/10.3390/agronomy12112683
Chicago/Turabian StyleZhao, Shengyi, Jizhan Liu, Yucheng Jin, Zongchun Bai, Jianlong Liu, and Xin Zhou. 2022. "Design and Testing of an Intelligent Multi-Functional Seedling Transplanting System" Agronomy 12, no. 11: 2683. https://doi.org/10.3390/agronomy12112683