

Vibration of a Liquid Crystal Elastomer Spring Oscillator under Periodic Electrothermal Drive

Abstract
:1. Introduction
2. Model and Theoretical Formulation
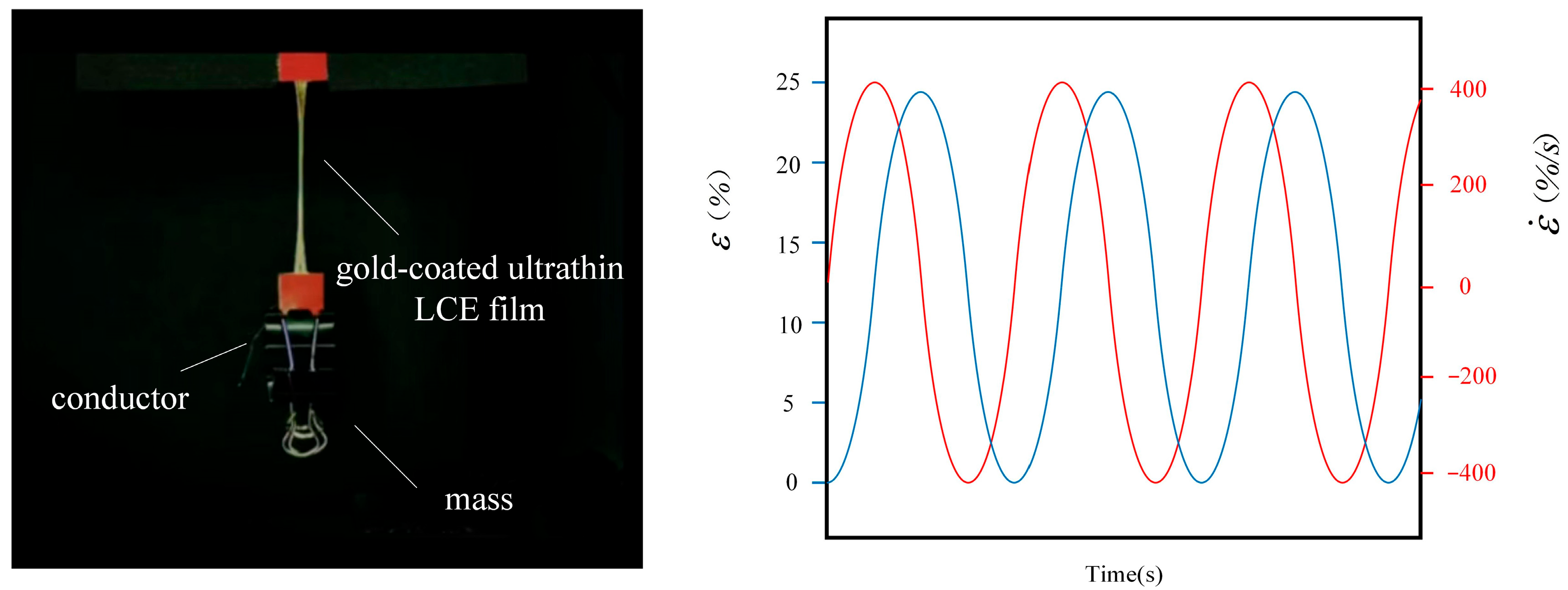
2.1. Dynamic Governing Equation of Spring Oscillator Stimulated by Electrothermal Drive
2.2. Electrothermally Driven Temperature Field in LCE Fiber
2.3. Nondimensionization
3. Results and Discussion
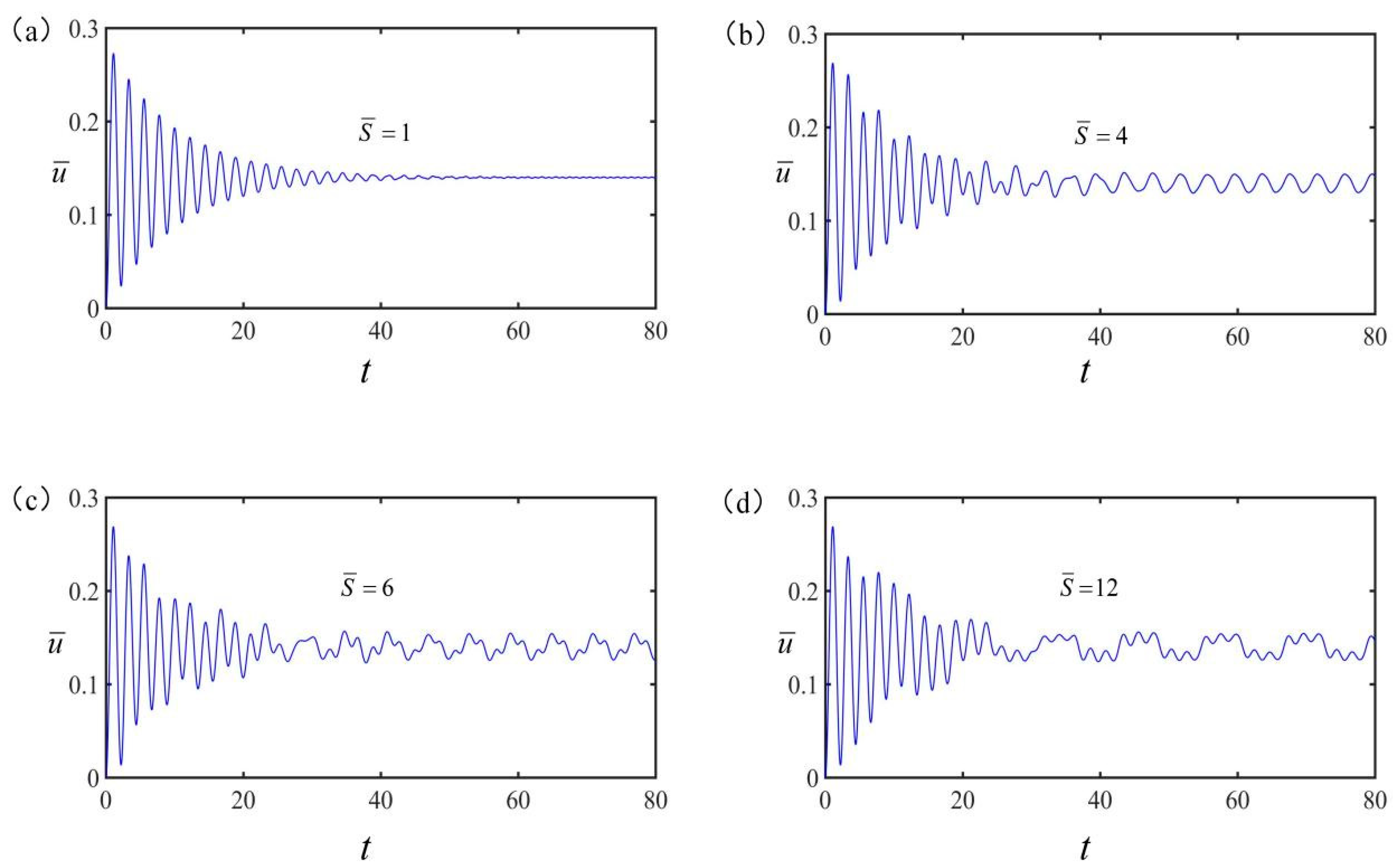
3.1. Forced Vibration of LCE Spring Oscillator under Periodic Electrothermal Drive
3.2. Optimal Electrothermal Drive Period
3.3. Optimal Electrothermal Drive Time Rate
4. Parametric Analysis
4.1. Effect of the Electricity Heat
4.2. Effect of the Damping Coefficient
4.3. Effect of the Gravital Acceleration
4.4. Effect of the Spring Constant
4.5. Effect of the Shrinkage Coefficient
4.6. Effect of the Initial Velocity
4.7. An application Example of the Periodic Vibration of the Spring Oscillator
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Warner, M.; Terentjev, E.M. Liquid Crystal Elastomers; Oxford University Press: Oxford, UK, 2007. [Google Scholar]
- Ware, T.H.; Mcconney, M.E.; Wie, J.J.; Tondiglia, V.P.; White, T.J. Voxelated liquid crystal elastomers. Science 2015, 347, 982–984. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Na, Y.H.; Aburaya, Y.; Orihara, H.; Hiraoka, K. Measurement of electrically induced shear strain in a chiral smectic liquid-crystal elastomer. Phys. Rev. E 2011, 83, 061709. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Corbett, D.; Warner, M. Deformation and rotations of free nematic elastomers in response to electric fields. Soft Matter 2009, 5, 1433–1439. [Google Scholar] [CrossRef]
- Zeng, H.; Wani, O.M.; Wasylczyk, P.; Kaczmarek, R.; Priimagi, A. Self-regulating iris based on light-actuated liquid crystal elastomer. Adv. Mater. 2017, 29, 1701814. [Google Scholar] [CrossRef]
- Kumar, K.; Knie, C.; Bleger, D.; Peletier, M.A.; Friedrich, H.; Hecht, S.; Broer, D.J.; Debijie, M.G.; Schenning, A.P. A chaotic self-oscillating sunlight-driven polymer actuator. Nat. Commun. 2016, 7, 11975. [Google Scholar] [CrossRef] [Green Version]
- Haberl, J.M.; Sanchez-Ferrer, A.; Mihut, A.M.; Dietsch, H.; Hirt, A.M.; Mezzenga, R. Liquid-crystalline elastomer-nanoparticle hybrids with reversible switch of magnetic memory. Adv. Mater. 2013, 25, 1787–1791. [Google Scholar] [CrossRef]
- Harris, K.D.; Cuypers, R.; Scheibe, P.; Oosten, C.L.; Bastiaansen, C.M.; Lub, J.; Broer, D.J. Large amplitude light-induced motion in high elastic modulus polymer actuators. J. Mater. Chem. A 2005, 15, 5043–5048. [Google Scholar] [CrossRef]
- Li, M.H.; Keller, P. Artificial muscles based on liquid crystal elastomers. Phil. Trans. R. Soc. A 2006, 364, 1471–2962. [Google Scholar] [CrossRef]
- Petsch, S.; Khatri, B.; Schuhladen, S.; Köbele, L.; Zappe, H. Muscular MEMS—The engineering of liquid crystal elastomer actuators. Smart Mater. Struct. 2016, 25, 085010. [Google Scholar] [CrossRef]
- Ohm, C.; Brehmer, M.; Zentel, R. Liquid crystalline elastomers as actuators and sensors. Adv. Mater. 2010, 22, 3366–3387. [Google Scholar] [CrossRef]
- Li, C.; Liu, Y.; Huang, X.; Jiang, H. Direct sun-driven artificial heliotropism for solar energy harvesting based on a photo-thermomechanical liquid-crystal elastomer nanocomposite. Adv. Funct. Mater. 2012, 22, 5166–5174. [Google Scholar] [CrossRef]
- Dawson, N.J.; Kuzyk, M.G.; Neal, J.; Luchette, P.; Palffy-Muhoray, P. Cascading of liquid crystal elastomer photomechanical optical devices. Opt. Commun. 2011, 284, 991–993. [Google Scholar] [CrossRef] [Green Version]
- Ji, Y.; Huang, Y.Y.; Rungsawang, R.; Terentjev, E.M. Dispersion and alignment of carbon nanotubes in liquid crystalline polymers and elastomers. Adv. Mater. 2010, 22, 3436–3440. [Google Scholar] [CrossRef]
- Houri, S.; Cartamil-bueno, S.J.; Poot, M.; Steeneken, P.G.; Vander Zant, H.S.; Venstra, W.J. Direct and parametric synchronization of a graphene self-oscillator. Appl. Phys. Lett. 2017, 110, 073103. [Google Scholar] [CrossRef] [Green Version]
- Firouzi, B.; Zamanian, M. The effect of capillary and intermolecular forces on instability of the electrostatically actuated microbeam with t-shaped paddle in the presence of fringing field. Appl. Math. Model. 2019, 71, 243–268. [Google Scholar] [CrossRef]
- Karimipour, I.; Beni, Y.T.; Akbarzadeh, A.H. Size-dependent nonlinear forced vibration and dynamic stability of electrically actuated micro-plates. Commun. Nonlinear Sci. 2019, 78, 104856. [Google Scholar] [CrossRef]
- Qin, Z.; Chu, F.; Zu, J. Free vibrations of cylindrical shells with arbitrary boundary conditions: A comparison study. Int. J. Mech. Sci. 2017, 133, 91–99. [Google Scholar] [CrossRef]
- Qin, Z.; Yang, Z.; Zu, J.; Chu, F. Free vibration analysis of rotating cylindrical shells coupled with moderately thick annular plates. Int. J. Mech. Sci. 2018, 142, 127–139. [Google Scholar] [CrossRef]
- Sunil, S.; Mahajan, A. A nonlinear stability analysis of a double-diffusive magnetized ferrofluid with magnetic field-dependent viscosity. J. Magn. Mater. 2009, 321, 2810–2820. [Google Scholar] [CrossRef]
- Shi, Z.; Yao, X.; Pang, F. An exact solution for the free-vibration analysis of functionally graded carbon-nanotube-reinforced composite beams with arbitrary boundary conditions. Sci. Rep. 2017, 7, 12909. [Google Scholar] [CrossRef] [Green Version]
- Moraes, N.P.; Rodrigues, L.A. Spray drying as feasible processing technique to enhance the photocatalytic activity of the Nbo/carbon xerogel composite25. Mater. Lett. 2020, 273, 127932. [Google Scholar] [CrossRef]
- Saito, M.; Sakiyama, K. Self-healable photochromic elastomer that transmits optical signals depending on the pulse frequency. J. Opt. 2013, 15, 105404. [Google Scholar] [CrossRef]
- Jang, J.; Bae, J.; Yoon, S.H. A study on the effect of surface treatment of carbon nanotubes for liquid crystalline epoxide–carbon nanotube composites. J. Mater. Chem. A 2003, 13, 676–681. [Google Scholar] [CrossRef]
- Ohm, C.; Serra, C.; Zentel, R. A continuous flow synthesis of micrometer-sized actuators from liquid crystalline elastomers. Adv. Mater. 2010, 21, 4859–4862. [Google Scholar] [CrossRef]
- Cotroneo, A.; Vozzi, G.; Gerovasi, L.; Rossi, D.D. A new bio-inspired robot based on senseless motion: Theoretical study and preliminary technological results. Multidiscip. Model. Mater. 2008, 4, 47–58. [Google Scholar] [CrossRef]
- Qin, Z.; Pang, X.; Safaei, B.; Chu, F. Free vibration analysis of rotating functionally graded CNT reinforced composite cylindrical shells with arbitrary boundary conditions. Compos. Struct. 2019, 220, 847–860. [Google Scholar] [CrossRef]
- Marshall, J.E.; Terentjev, E.M. Photo-sensitivity of dye-doped liquid crystal elastomers. Soft Matter 2013, 98, 547–551. [Google Scholar] [CrossRef]
- Jiang, W.; Niu, D.; Liu, H. Photoresponsive soft-robotic platform: Biomimetic fabrication and remote actuation. Adv. Funct. Mater. 2014, 24, 7598–7604. [Google Scholar] [CrossRef]
- Wehner, M.; Truby, R.L.; Fitzgerald, D.J.; Mosadegh, B.; Whitesides, G.; Lewis, J.; Wood, R. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 2016, 536, 451–455. [Google Scholar] [CrossRef] [Green Version]
- Truby, R.L.; Wehner, M.; Grosskopf, A.K.; Vogt, D.M. Soft robotics: Soft somatosensitive actuators via embedded 3D printing. Adv. Mater. 2018, 30, 1870106. [Google Scholar] [CrossRef]
- Yang, D.P. An anthropomorphic robot hand developed based on underactuated mechanism and controlled by EMG signals. J. Bionic Eng. 2009, 6, 255–263. [Google Scholar] [CrossRef]
- Nagele, T.; Hoche, R.; Zinth, W.; Wachtveitl, J. Femtosecond photoisomerization of cis-azobenzene. Chem. Phys. Lett. 1997, 272, 489–495. [Google Scholar] [CrossRef]
- Li, Z.C.; Chai, M.S.; Zhao, X.L.; Zhong, Y.J.; Zhu, H.W. Transparent electrothermal film defoggers and antiicing coatings based on wrinkled graphene. Small 2020, 16, 01905945. [Google Scholar] [CrossRef]
- Li, C.; Liu, Y.; Lo, C.W. Reversible white-light actuation of carbon nanotube incorporated liquid crystalline elastomer nanocomposites. Soft Matter 2011, 7, 7511–7516. [Google Scholar] [CrossRef]
- Pevnyi, M.; Moreira-Fontana, M.; Richards, G. Studies of photo-thermal deformations of liquid crystal elastomers under local illumination. Mol. Cryst. Liq. Cryst. 2017, 647, 228–234. [Google Scholar] [CrossRef]
- Barilo, V.G. Thermal Deformation of the Material at Different Rigidities of the Loading System. Strength Mater. 2003, 35, 297–304. [Google Scholar] [CrossRef]
- Li, K.; Su, X.; Cai, S.Q. Self-sustained rolling of a thermally responsive rod on a hot surface. Extrem. Mech. Lett. 2021, 42, 101116. [Google Scholar] [CrossRef]
- Wang, M.; Cheng, Z.W.; Zuo, B.; Chen, X.M. Liquid Crystal Elastomer Electric Locomotives. ACS Macro Lett. 2020, 9, 860–865. [Google Scholar] [CrossRef]
- Lehmann1, H.; Skupin, C.; Tolksdorf, E. Giant lateral electrostriction in ferroelectric liquid-crystalline elastomers. Nature 2001, 410, 447–450. [Google Scholar] [CrossRef]
- Lin, G.H.; Chen, J.T.; Lin, Y.T.; Yang, W.Y. Effects of molecular configuration and driving architecture on electro-optical properties of cholesteric liquid crystal displays. J. Disp. Technol. 2015, 11, 2447736. [Google Scholar] [CrossRef]
- Wang, Y.; He, Q.; Wang, Z.; Zhang, S.; Li, C.; Wang, Z.; Park, Y.L.; Cai, S. Liquid crystal elastomer based dexterous artificial motor unit. Adv. Mater. 2023, 35, 2211283. [Google Scholar] [CrossRef] [PubMed]
- Schlafmann, K.R.; White, T.J. Retention and deformation of the blue phases in liquid crystalline elastomers. Nat. Commun. 2021, 12, 4916. [Google Scholar] [CrossRef] [PubMed]
- Martella, D.; Nocentini, C.; Wiersma, D.S. Self-regulating capabilities in photonic robotics. Adv. Mater. Technol. 2019, 4, 1800571. [Google Scholar] [CrossRef]
- Vantomme, G.; Gelebart, A.H.; Broer, D.J.; Meijer, E.W. A four-blade light-driven plastic mill based on hydrazone liquid- crystal networks. Tetrahedron 2017, 73, 4963–4967. [Google Scholar] [CrossRef]
- Wang, X.Q.; Tan, C.F.; Lu, X.; Chan, K.H.; Ho, G.W. In-built thermo-mechanical cooperative feedback mechanism for self-propelled multimodal locomotion and electricity generation. Nat. Commun. 2018, 9, 3438. [Google Scholar] [CrossRef] [PubMed]
- Shin, B.; Ha, J.; Lee, M.; Park, G.H.; Choi, T.H.; Cho, K.J.; Kim, H.Y. Hygrobot: A self-locomotive ratcheted actuator powered by environmental humidity. Sci. Robot. 2018, 3, 2629. [Google Scholar] [CrossRef] [Green Version]
- Querceto, S.; Ferrantini, C.; Grandinetti, B.; Martella, D.; Manue, P.J.; Sybot, W.D.; Parmeggiani, C. Microled illumination towards liquid crystalline elastomers based cardiac contraction assistance. Biophys. J. 2020, 118, 424a–425a. [Google Scholar] [CrossRef]
- Li, K.; Cai, S. Modeling of light-driven bending vibration of a liquid crystal elastomer beam. J. Appl. Mech. 2016, 83, 031009. [Google Scholar] [CrossRef] [Green Version]
- Sekiguchi, A.; Kono, Y.; Hirai, Y. Study on polymer materials evaluation system for nano-Imprint lithography. J. Photopolym. Sci. Technol. 2005, 18, 543–549. [Google Scholar] [CrossRef] [Green Version]
- Huang, Y.Y.; Ahir, S.V.; Terentjev, E.M. Dispersion rheology of carbon nanotubes in a polymer matrix. Phys. Rev. B 2006, 73, 125422. [Google Scholar] [CrossRef] [Green Version]
- Harris, K.D.; Bastiaansen, C.W.; Broer, D.J. Physical properties of anisotropically swelling hydrogen-bonded liquid crystal polymer actuators. J. Microelectromech. Syst. 2007, 16, 480–488. [Google Scholar] [CrossRef]
- Elias, A.L.; Harris, K.D.; Bastiaansen, C.W.; Broer, D.J.; Brett, M.J. Photopatterned liquid crystalline polymers for microactuators. J. Mater. Chem. A 2006, 16, 2903–2912. [Google Scholar] [CrossRef]
- Penzes, L.E.; Kraus, H. Free vibration of prestressed cylindrical shells having arbitrary homogeneous boundary conditions. AIAA J. 1972, 10, 1309–1313. [Google Scholar] [CrossRef]
- Hashemi, S.H.; Taher, H.; Omidi, M. 3-D free vibration analysis of annular plates on Pasternak elastic foundation via p-Ritz method. J. Sound Vib. 2007, 311, 1114–1140. [Google Scholar] [CrossRef]
- Hajnayeb, A.; Khadem, S.E. Nonlinear vibration and stability analysis of a double-walled carbon nanotube under electrostatic actuation. J. Sound Vib. 2012, 331, 2443–2456. [Google Scholar] [CrossRef]
- Chang, S.C. Stability, chaos detection, and quenching chaos in the swing equation system. Math. Probl. Eng. 2020, 12, 6677084. [Google Scholar] [CrossRef]
- Yu, Y.; Nakano, M.; Ikeda, T. Directed bending of a polymer film by light. Nature 2003, 425, 145. [Google Scholar] [CrossRef]
- Serak, S.; Tabiryan, N.; Vergara, R.; White, T.J.; Vaia, R.A.; Bunning, T.J. Liquid crystalline polymer cantilever oscillators fueled by light. Soft Matter 2010, 6, 779–783. [Google Scholar] [CrossRef]
- Nayfeh, A.H.; Emam, S.A. Exact solution and stability of postbuckling configurations of beams. Nonlinear Dyn. 2008, 54, 395–408. [Google Scholar] [CrossRef]
- Cao, L.S.; Qi, D.X.; Peng, R.W.; Wang, M.; Schmelcher, P. Phononic frequency combs through nonlinear resonances. Phys. Rev. Lett. 2014, 112, 075505. [Google Scholar] [CrossRef] [Green Version]
- Yang, T.; Yuan, H.; Wang, S.; Gao, X.; Zhao, H.; Niu, P.; Liu, B. Tough biomimetic films for harnessing natural evaporation for various self-powered devices. J. Mater. Chem. A 2020, 8, 19269–19277. [Google Scholar] [CrossRef]
- San-Millan, A.; Hosseini, M.; Paik, J. A hybrid control strategy for force and precise end effector positioning of a twisted string actuator. IEEE ASME Trans. Mech. 2021, 26, 2791–2802. [Google Scholar]
- Ahn, K.K.; Chau, N.H. Intelligent phase plane switching control of a pneumatic muscle robot arm with Magneto-Rheological Brake. J. Mech. Sci. Technol. 2007, 21, 1196–1206. [Google Scholar] [CrossRef]
- Finkelmann, H.; Nishikawa, E.; Pereira, G.G.; Warner, M. A new opto-mechanical effect in solids. Phys. Rev. Lett. 2001, 87, 015501. [Google Scholar] [CrossRef] [PubMed]
- Zhang, N.; Wang, W.; Zhu, X.; Liu, J.; Xu, K.; Hang, P.; Wang, M. Investigation of ultrashort pulse laser ablation of solid targets by measuring the ablation-generated momentum using a torsion pendulum. Opt. Express 2011, 19, 8870. [Google Scholar] [CrossRef]
- Braun, L.B.; Hessberger, T.; Pütz, E.; Müller, C.; Giesselmann, F.; Serra, C.A.; Zentel, R. Actuating thermo- and photo-responsive tubes from liquid crystalline elastomers. J. Mater. Chem. C 2018, 6, 9093–9101. [Google Scholar] [CrossRef]
- Hessberger, T.; Braun, L.B.; Henrich, F.; Müller, C.; Giesselmann, F.; Serra, C.; Zentel, R. Co-flow microfluidic synthesis of liquid crystalline actuating Janus particles. J. Mater. Chem. C 2016, 4, 8778–8786. [Google Scholar] [CrossRef] [Green Version]
- Camacho-Lopez, M.; Finkelmann, H.; Palffy-Muhoray, P.; Shelley, M. Fast liquid-crystal elastomer swims into the dark. Nat. Mater. 2004, 3, 307–310. [Google Scholar] [CrossRef]
- Vantomme, G.; Elands, L.; Gelebart, A.H.; Meijer, E.W.; Pogromsky, A.Y.; Nijmeijer, H.; Broer, D.J. Coupled liquid crystalline oscillators in Huygens synchrony. Nat. Mater. 2021, 20, 1702–1706. [Google Scholar] [CrossRef]
- Nie, Z.Z.; Zuo, B.; Wang, M.; Huang, S.; Chen, X.M.; Liu, Z.Y.; Yang, H. Light-driven continuous rotating Möbius strip actuators. Nat. Commun. 2021, 12, 2334. [Google Scholar] [CrossRef]
- Zhang, L.; Liang, H.; Jacob, J.; Naumov, P. Erratum: Photogated humidity-driven motility. Nat. Commun. 2015, 6, 7862. [Google Scholar] [CrossRef] [Green Version]
- Chiang, W.F.; Silalahi, H.W.; Chiang, Y.C.; Hsu, M.C.; Zhang, Y.S.; Liu, J.H.; Yu, Y.L.; Lee, C.R.; Huang, C.Y. Continuously tunable intensity modulators with large switching contrasts using liquid crystal elastomer films that are deposited with terahertz metamaterials. Opt. Express 2020, 28, 27676–27687. [Google Scholar] [CrossRef]
- Hao, Q.; Chen, C.X.; Cao, J.; Li, Z.K.; Cheng, Y. Ultra-wide varifocal imaging with selectable region of interest capacity using alvarez lenses actuated by a dielectric elastomer. Photon. Res. 2022, 10, 1543–1551. [Google Scholar] [CrossRef]
- Jo, G.; Edinger, P.; Bleiker, S.J.; Wang, X.J.; Takabayashi, A.Y.; Sattari, H.; Quack, N.; Jezzini, M.; Lee, J.S.; Verheyen, P.; et al. Wafer-level hermetically sealed silicon photonic MEMS. Photon. Res. 2022, 10, A14–A21. [Google Scholar] [CrossRef]
- Yakacki, C.M.; Saed, M.; Nair, D.P.; Gong, T.; Reed, S.M.; Bowman, C.N. Tailorable and programmable liquid-crystalline elastomers using a two-stage thiol-acrylate reaction. RSC Adv. 2015, 5, 18997–19001. [Google Scholar] [CrossRef]
- Baumann, A.; Sánchez-Ferrer, A.; Jacomine, L.; Martinoty, P.; Le Houerou, V.; Ziebert, F.; Kulić, I.M. Motorizing fibres with geometric zero-energy modes. Nat. Mater. 2018, 17, 523. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Definition | Value | Unit |
|---|---|---|---|
| Electricity heat | |||
| Damping coefficient | |||
| Gravital acceleration | 10 | ||
| Spring constant | 300~400 | ||
| Shrinkage coefficient | 0.2 | / | |
| Initial velocity | 0~2.5 | ||
| Original length of LCE fiber | 0.08 | ||
| Te | Ambient temperature | 300 | K |
| Mass of the ball | 0.5 | ||
| Thermal relaxation time | 0.1 | ||
| Heat transfer coefficient | 1 | ||
| Specific heat capacity | 0.1 |
| Parameter | ||||||
|---|---|---|---|---|---|---|
| Value | 0~0.7 | 1~4 | 1.2 | 6~8 | 0.2 | 0~2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, K.; Lou, J.; Hu, S.; Dai, Y.; Wang, F.; Yu, Y. Vibration of a Liquid Crystal Elastomer Spring Oscillator under Periodic Electrothermal Drive. Polymers 2023, 15, 2822. https://doi.org/10.3390/polym15132822
Li K, Lou J, Hu S, Dai Y, Wang F, Yu Y. Vibration of a Liquid Crystal Elastomer Spring Oscillator under Periodic Electrothermal Drive. Polymers. 2023; 15(13):2822. https://doi.org/10.3390/polym15132822
Chicago/Turabian StyleLi, Kai, Jiangfeng Lou, Shaofei Hu, Yuntong Dai, Fei Wang, and Yong Yu. 2023. "Vibration of a Liquid Crystal Elastomer Spring Oscillator under Periodic Electrothermal Drive" Polymers 15, no. 13: 2822. https://doi.org/10.3390/polym15132822