
Wearable Pressure Sensor Using Porous Natural Polymer Hydrogel Elastomers with High Sensitivity over a Wide Sensing Range
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
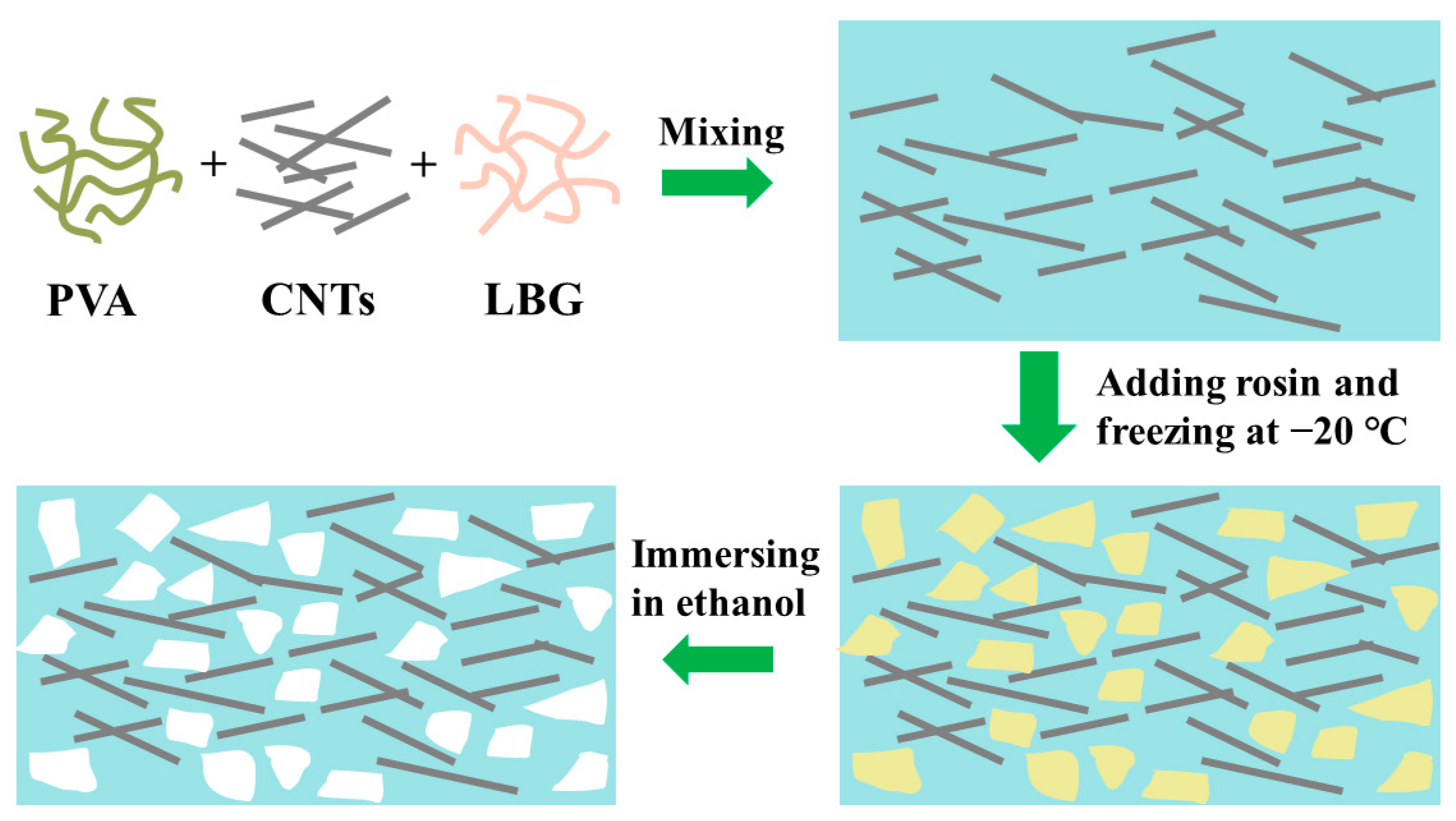
2.1. Preparation of Porous LBG-Based Hydrogels and Original LBG-Based Hydrogels
2.2. Materials Characterization
2.3. Electrical Characterization
3. Results and Discussion
3.1. Fabrication and Characterization of Porous and Original Hydrogels
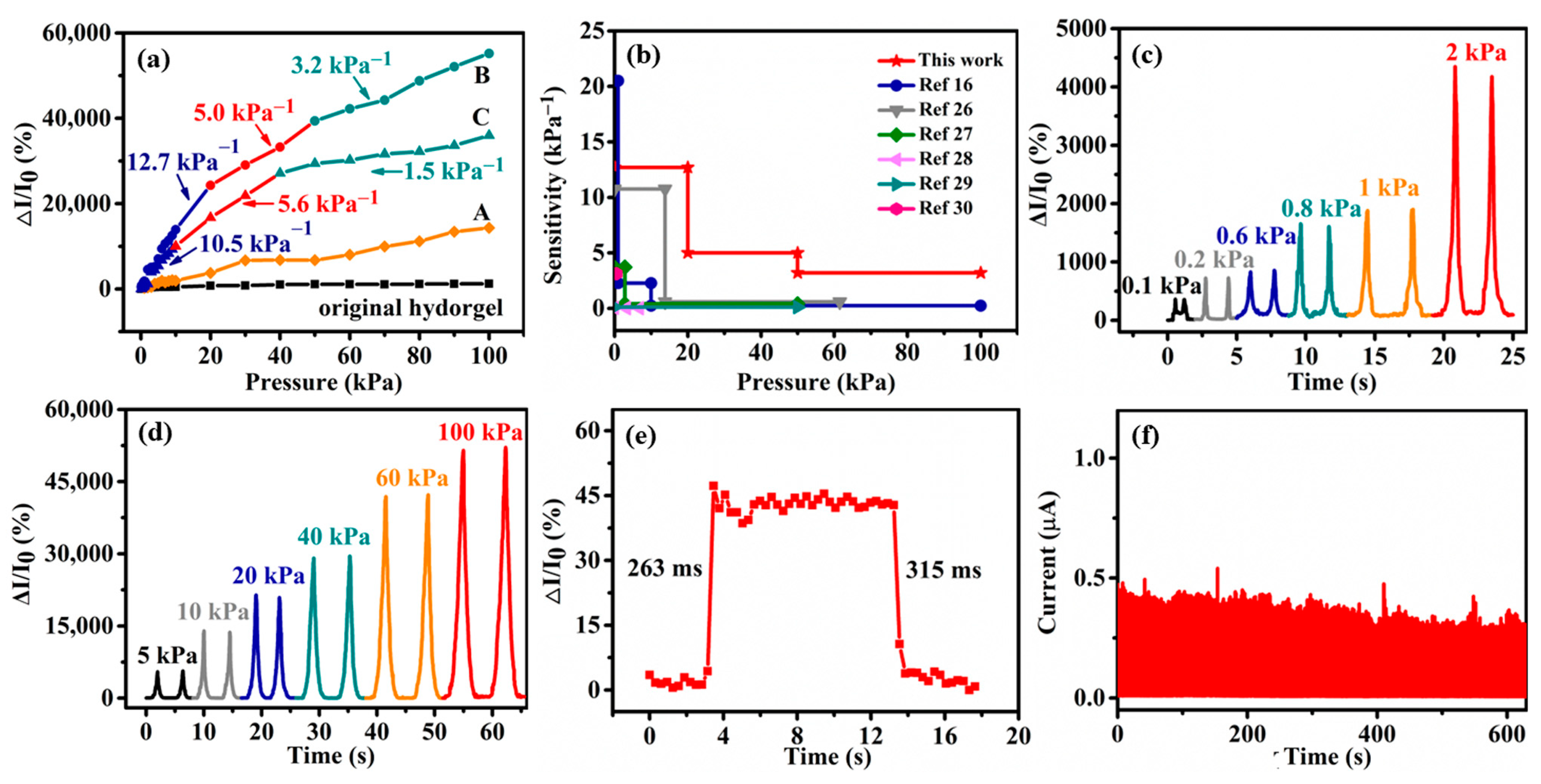
3.2. Sensing Performance of the Sensors
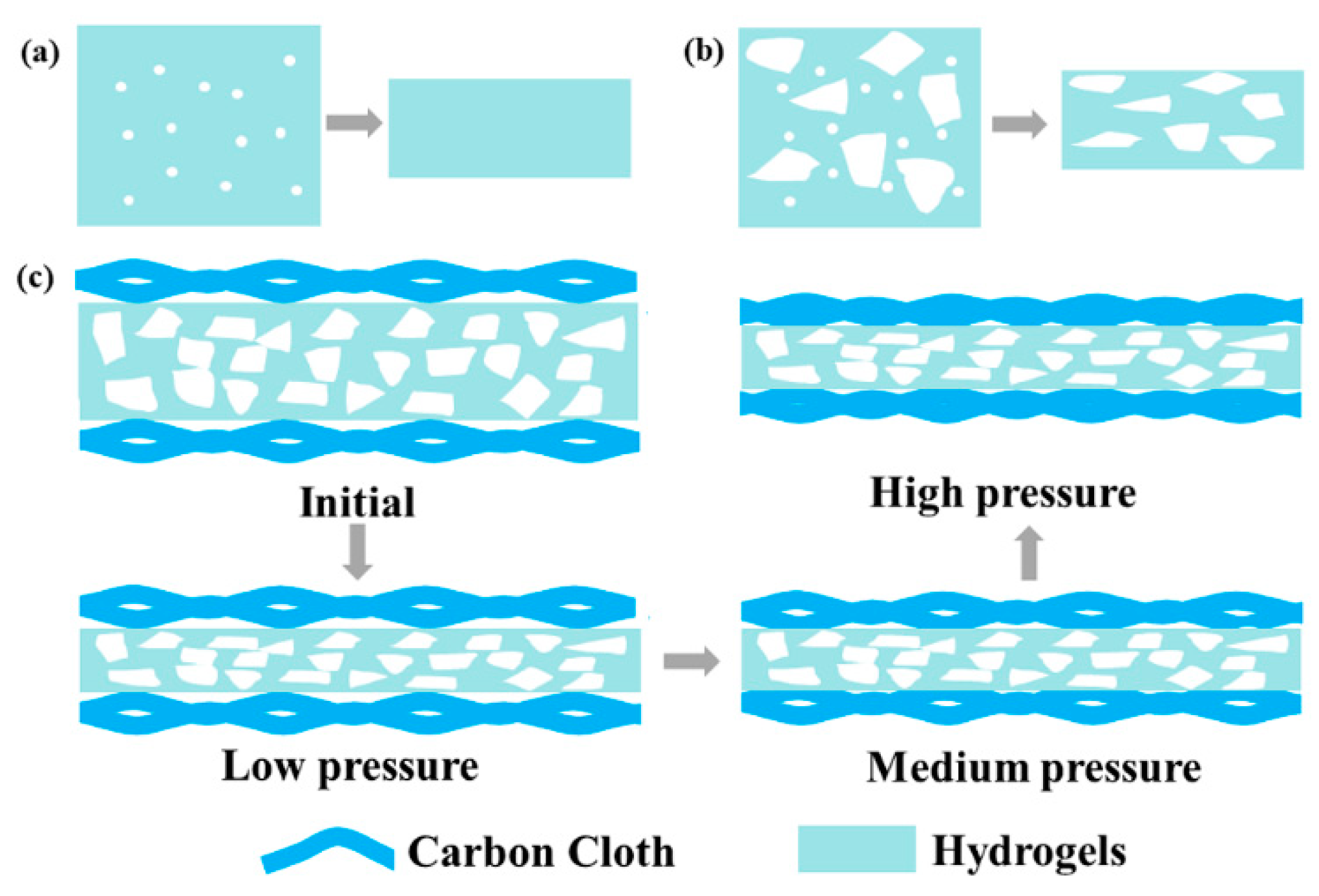
3.3. The Sensing Mechanism of the Sensor
3.4. Applications of the Sensor
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Yue, Y.; Liu, N.; Su, T.; Cheng, Y.; Liu, W.; Lei, D.; Cheng, F.; Ge, B.; Gao, Y. Self-Powered Nanofluidic Pressure Sensor with a Linear Transfer Mechanism. Adv. Funct. Mater. 2023, 33, 2211613. [Google Scholar] [CrossRef]
- Meng, K.; Xiao, X.; Wei, W.; Chen, G.; Nashalian, A.; Shen, S.; Xiao, X.; Chen, J. Wearable Pressure Sensors for Pulse Wave Monitoring. Adv. Mater. 2022, 34, 2109357. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.-M.; Tao, L.-Q.; Yuan, M.; Wang, Z.-P.; Yu, J.; Xie, D.; Luo, F.; Chen, X.; Wong, C. Sea Urchin-like Microstructure Pressure Sensors with an Ultra-broad Range and High Sensitivity. Nat. Commun. 2021, 12, 1776. [Google Scholar] [CrossRef]
- Huang, C.-Y.; Yang, G.; Huang, P.; Hu, J.-M.; Tang, Z.-H.; Li, Y.-Q.; Fu, S.-Y. Flexible Pressure Sensor with an Excellent Linear Response in a Broad Detection Range for Human Motion Monitoring. ACS Appl. Mater. Interfaces 2023, 15, 3476–3485. [Google Scholar] [CrossRef] [PubMed]
- Cao, W.; Luo, Y.; Dai, Y.; Wang, X.; Wu, K.; Lin, H.; Rui, K.; Zhu, J. Piezoresistive Pressure Sensor Based on a Conductive 3D Sponge Network for Motion Sensing and Human–Machine Interface. ACS Appl. Mater. Interfaces 2023, 15, 3131–3140. [Google Scholar] [CrossRef]
- Sang, Z.; Ke, K.; Manas-Zloczower, I. Design Strategy for Porous Composites Aimed at Pressure Sensor Application. Small 2019, 15, 1903487. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.; Deng, W.; Yang, T.; Ao, Y.; Zhang, H.; Tian, G.; Deng, L.; Huang, H.; Huang, J.; Lan, B.; et al. Bioinspired MXene-Based Piezoresistive Sensor with Two-stage Enhancement for Motion Capture. Adv. Funct. Mater. 2023, 33, 2214503. [Google Scholar] [CrossRef]
- Ma, Y.; Zhao, K.; Han, J.; Han, B.; Wang, M.; Tong, Z.; Suhr, J.; Xiao, L.; Jia, S.; Chen, X. Pressure Sensor Based on a Lumpily Pyramidal Vertical Graphene Film with a Broad Sensing Range and High Sensitivity. ACS Appl. Mater. Interfaces 2023, 15, 13813–13821. [Google Scholar]
- Ha, K.-H.; Zhang, W.; Jang, H.; Kang, S.; Wang, L.; Tan, P.; Hwang, H.; Lu, N. Highly Sensitive Capacitive Pressure Sensors over a Wide Pressure Range Enabled by the Hybrid Responses of a Highly Porous Nanocomposite. Adv. Mater. 2021, 33, 2103320. [Google Scholar] [CrossRef]
- Lu, J.; Hu, S.; Li, W.; Wang, X.; Mo, X.; Gong, X.; Liu, H.; Luo, W.; Dong, W.; Sima, C.; et al. A Biodegradable and Recyclable Piezoelectric Sensor based on a Molecular Ferroelectric Embedded in a Bacterial Cellulose Hydrogel. ACS Nano 2022, 16, 3744–3755. [Google Scholar]
- Liu, Y.; Wu, B.; Zhang, Q.; Li, Y.; Gong, P.; Yang, J.; Park, C.B.; Li, G. Micro/nano-structure Skeleton Assembled with Graphene for Highly Sensitive and Flexible Wearable Sensor. Compos. Part A 2023, 165, 107357. [Google Scholar] [CrossRef]
- Tong, R.; Chen, G.; Tian, J.; He, M. Highly Stretchable, Strain-Sensitive, and Ionic-Conductive Cellulose-Based Hydrogels for Wearable Sensors. Polymers 2019, 11, 2067. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, J.; Huang, Y.; Liu, B.; Li, Z.; Zhang, J.; Yang, G.; Hiralal, P.; Jin, S.; Zhou, H. Flexible and Anti-freezing Zinc-ion Batteries Using a Guar-gum/sodium-alginate/ethylene-glycol Hydrogel Electrolyte. Energy Storage Mater. 2021, 41, 599–605. [Google Scholar] [CrossRef]
- Cao, L.; Zhao, Z.; Wang, X.; Huang, X.; Li, J.; Wei, Y. Tough, Antifreezing, and Conductive Hydrogel Based on Gelatin and Oxidized Dextran. Adv. Mater. Technol. 2022, 7, 2101382. [Google Scholar] [CrossRef]
- Wu, M.; Wang, X.; Xia, Y.; Zhu, Y.; Zhu, S.; Jia, C.; Guo, W.; Li, Q.; Yan, Z. Stretchable Freezing-tolerant Triboelectric Nanogenerator and Strain Sensor Based on Transparent, Long-term Stable, and Highly Conductive Gelatin-based Organohydrogel. Nano Energy 2022, 95, 106967. [Google Scholar] [CrossRef]
- Huang, Y.; Liu, B.; Zhang, W.; Qu, G.; Jin, S.; Li, X.; Nie, Z.; Zhou, H. Highly Sensitive Active-powering Pressure Sensor Enabled by Integration of Double-rough Surface Hydrogel and Flexible Batteries. Npj Flex. Electron. 2022, 6, 92. [Google Scholar] [CrossRef]
- Shen, X.; Zheng, L.; Tang, R.; Nie, K.; Wang, Z.; Jin, C.; Sun, Q. Double-network Hierarchical-porous Piezoresistive Nanocomposite Hydrogel Sensors Based on Compressive Cellulosic Hydrogels Deposited with Silver Nanoparticles. ACS Sustain. Chem. Eng. 2020, 8, 7480–7488. [Google Scholar] [CrossRef]
- Yang, Y.; Yang, Y.; Cao, Y.; Wang, X.; Chen, Y.; Liu, H.; Gao, Y.; Wang, J.; Liu, C.; Wang, W.; et al. Anti-freezing, Resilient and Tough Hydrogels for Sensitive and Large Range Strain and Pressure Sensors. Chem. Eng. J. 2021, 403, 126431. [Google Scholar]
- Zhao, S.; Zhu, R. High Sensitivity and Broad Range Flexible Pressure Sensor Using Multilayered Porous PDMS/AgNP Sponge. Adv. Mater. Technol. 2019, 4, 1900414. [Google Scholar] [CrossRef]
- Bae, K.; Kim, M.; Kang, Y.; Sim, S.; Kim, W.; Pyo, S.; Kim, J. Dual-Scale Porous Composite for Tactile Sensor with High Sensitivity over an Ultrawide Sensing Range. Small 2022, 18, 2203193. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Chen, H.; Su, Z.; Chen, X.; Miao, L.; Zhang, J.; Cheng, X.; Zhang, H. Highly Compressible Integrated Supercapacitor–Piezoresistance-Sensor System with CNT–PDMS Sponge for Health Monitoring. Small 2017, 13, 1702091. [Google Scholar] [CrossRef] [PubMed]
- Zhu, D.; Wang, S.H.; Zhou, X. Recent Progress in Fabrication and Application of Polydimethylsiloxane Sponges. J. Mater. Chem. A 2017, 5, 16467–16497. [Google Scholar] [CrossRef]
- Yu, C.; Yu, C.; Cui, L.; Song, Z.; Zhao, X.; Ma, Y.; Jiang, L. Facile Preparation of the Porous PDMS Oil-Absorbent for Oil/Water Separation. Adv. Mater. Interfaces 2017, 4, 1600862. [Google Scholar] [CrossRef]
- Lo, L.-W.; Zhao, J.; Wan, H.; Wang, Y.; Chakrabartty, S.; Wang, C. A Soft Sponge Sensor for Multimodal Sensing and Distinguishing of Pressure, Strain, and Temperature. ACS Appl. Mater. Interfaces 2022, 14, 9570–9578. [Google Scholar] [CrossRef]
- Wu, K.; Li, X. Wearable Pressure Sensor for Athletes’ Full-range Motion Signal Monitoring. Mater. Res. Express 2020, 7, 105003. [Google Scholar]
- Lu, Y.; Qu, X.; Zhao, W.; Ren, Y.; Si, W.; Wang, W.; Wang, Q.; Huang, W.; Dong, X. Highly Stretchable, Elastic, and Sensitive MXene-based Hydrogel for Flexible Strain and Pressure Sensors. Research 2020, 1, 2038560. [Google Scholar] [CrossRef] [PubMed]
- Yin, M.; Zhang, Y.; Yin, Z.; Zheng, Q.; Zhang, A.P. Micropatterned Elastic Gold-nanowire/polyacrylamide Composite Hydrogels for Wearable Pressure Sensors. Adv. Mater. Technol. 2018, 3, 1800051. [Google Scholar] [CrossRef]
- Ge, G.; Zhang, Y.; Shao, J.; Wang, W.; Si, W.; Huang, W.; Dong, X. Stretchable, Transparent, and Self-patterned Hydrogel-based Pressure Sensor for Human Motions Detection. Adv. Funct. Mater. 2018, 28, 1802576. [Google Scholar] [CrossRef]
- Qin, Z.; Sun, X.; Yu, Q.; Zhang, H.; Wu, X.; Yao, M.; Liu, W.; Yao, F.; Li, J. Carbon Nanotubes/Hydrophobically Associated Hydrogels as Ultrastretchable, Highly Sensitive, Stable Strain, and Pressure Sensors. ACS Appl. Mater. Interfaces 2020, 12, 4944–4953. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, D.; Xie, Y.; Song, Y.; Zhu, E.; Shi, Z.; Yang, Q.; Xiong, C. Flexible and Sensitive Piezoresistive Electronic Skin Based on TOCN/PPy Hydrogel Films. J. Appl. Polym. Sci. 2021, 138, 51367. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, F.; Jin, S.; Zhang, W.; Zhang, Y.; Zhou, H.; Huang, Y. Wearable Pressure Sensor Using Porous Natural Polymer Hydrogel Elastomers with High Sensitivity over a Wide Sensing Range. Polymers 2023, 15, 2736. https://doi.org/10.3390/polym15122736
Xiao F, Jin S, Zhang W, Zhang Y, Zhou H, Huang Y. Wearable Pressure Sensor Using Porous Natural Polymer Hydrogel Elastomers with High Sensitivity over a Wide Sensing Range. Polymers. 2023; 15(12):2736. https://doi.org/10.3390/polym15122736
Chicago/Turabian StyleXiao, Fan, Shunyu Jin, Wan Zhang, Yingxin Zhang, Hang Zhou, and Yuan Huang. 2023. "Wearable Pressure Sensor Using Porous Natural Polymer Hydrogel Elastomers with High Sensitivity over a Wide Sensing Range" Polymers 15, no. 12: 2736. https://doi.org/10.3390/polym15122736