


Predictive Modeling of Soft Stretchable Nanocomposites Using Recurrent Neural Networks

 ,
,  , ,
, ,  and
and 
Abstract
:
1. Introduction
1.1. Analogy-Based Learning and Data-Driven Learning of Dynamic Mechanical Systems
1.2. Objective
2. Materials and Methods
2.1. Composite Films Sample Preparation
2.2. Testing Validation Method for Stretchable Materials
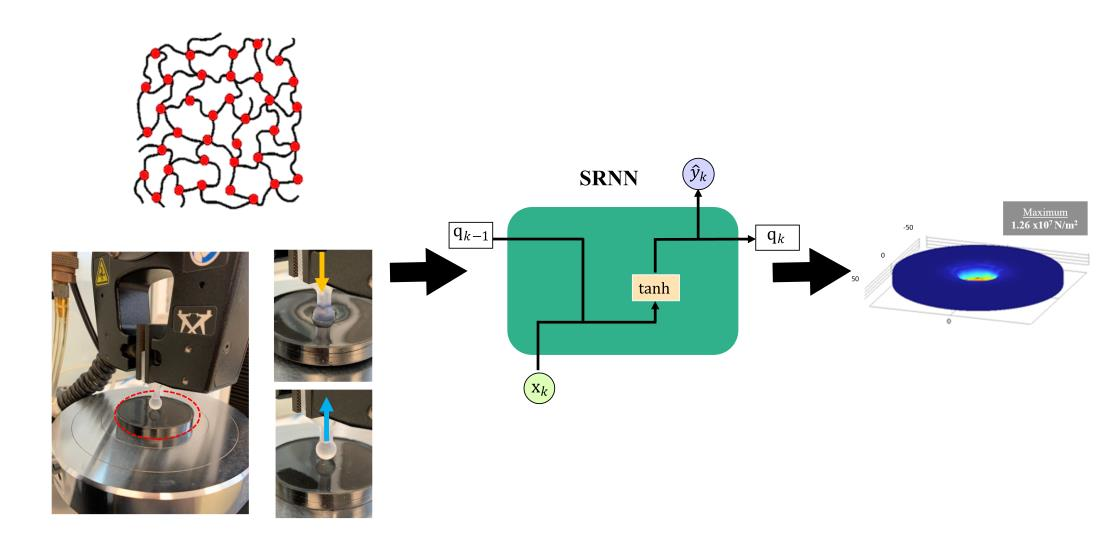
2.3. Coupling RNN with Mechanical Models
- 1.
- The first sub-model is the generalized Kelvin-Voigt equations viscoelastic model, which can have a nonlinear spring in parallel with a nonlinearly viscous dashpot through , where and could be nonlinear functions, and are the stresses in the spring and dashpot, respectively, σ is the total stress. The fractional-order derivative that describes this analogous mass-spring-damper system is , where denotes the deformation that we can obtain from uniaxial tests.
- 2.
- The second sub-model focuses on the behavior of hysteresis under loading conditions to define and . That is, in a viscoelastic element such as a damper the dissipated energy is expected to be higher, while in an elastic element, such as a spring, the elastic energy is expected to be higher. As the elastic and dissipated energy depend on the loading process, then, two deformation mechanisms inspired by out-of-plane indentation were used with unconventional boundary conditions that reveal the elastic and dissipative behavior of the nanocomposite similar to the behavior of springs or dampers.
2.4. Fundamental System Identification and RNN Analogy
2.5. Baseline Numerical Mechanical Model and One-Step Approximation
2.6. Data Sets Experimental Data and Network Setup
2.7. Coupled Discrete Numerical Simulation Framework
3. Results and Discussion
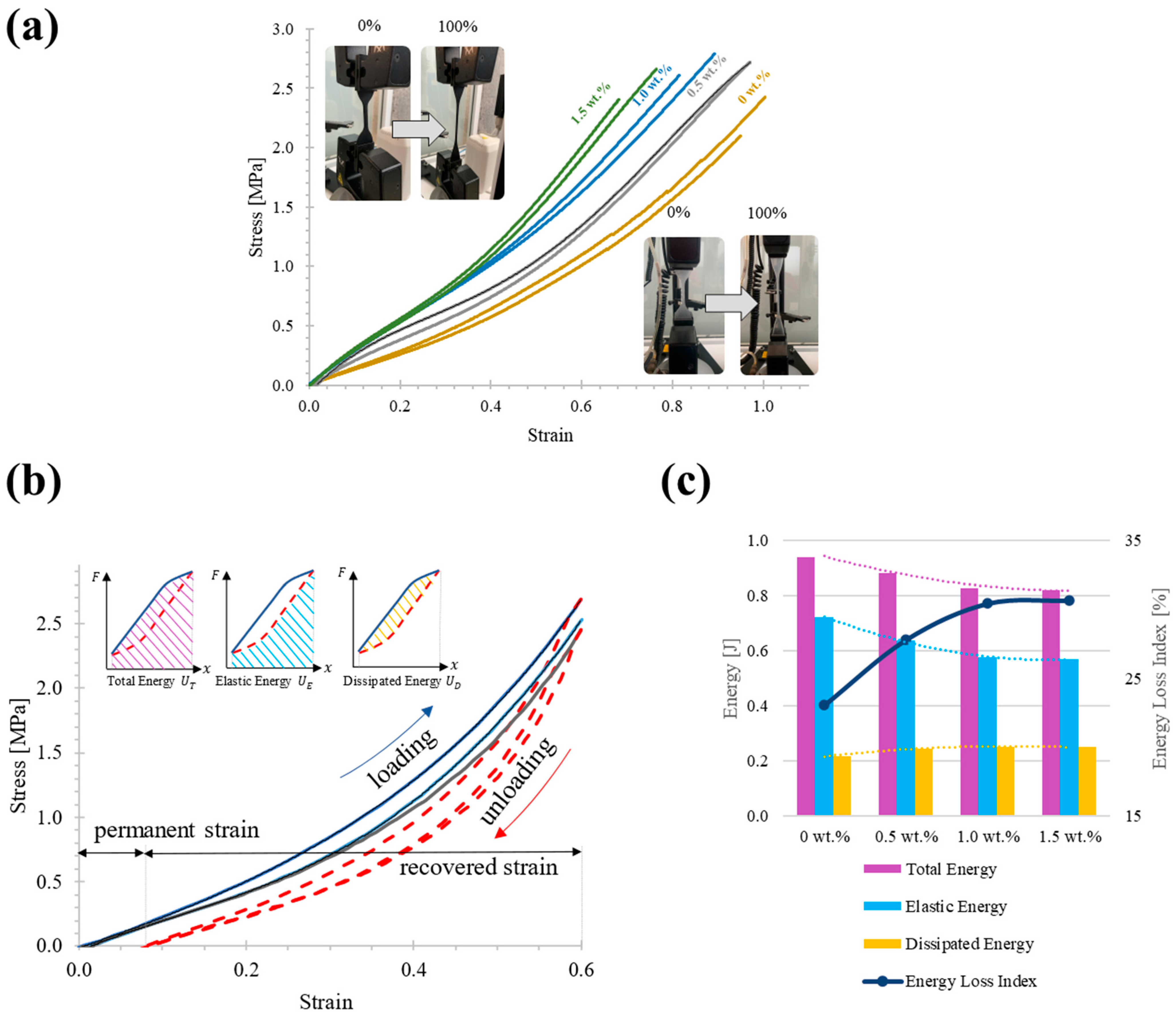
3.1. Stress–Strain Behavior, Mullins Effect, and Strain Energy
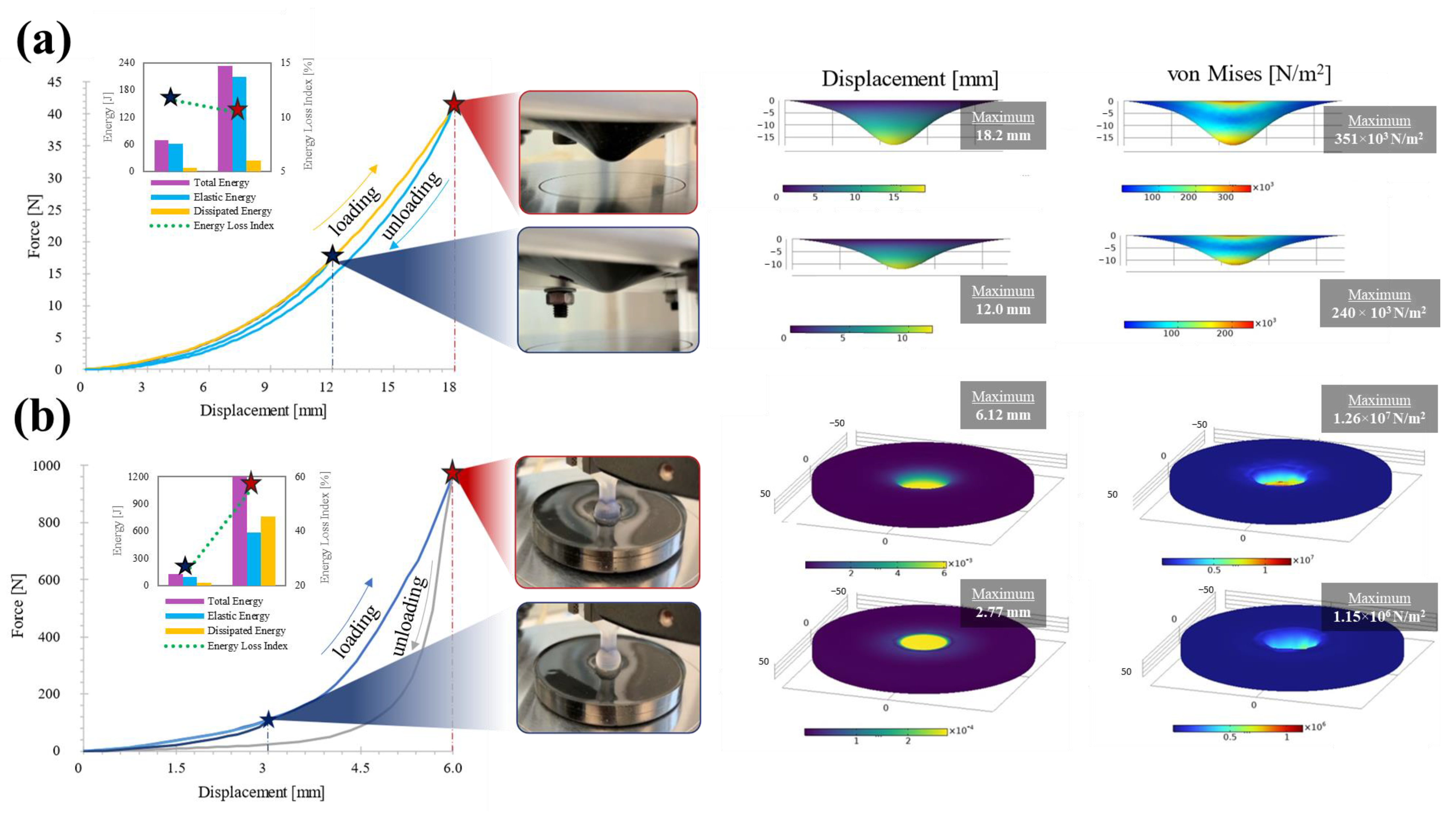
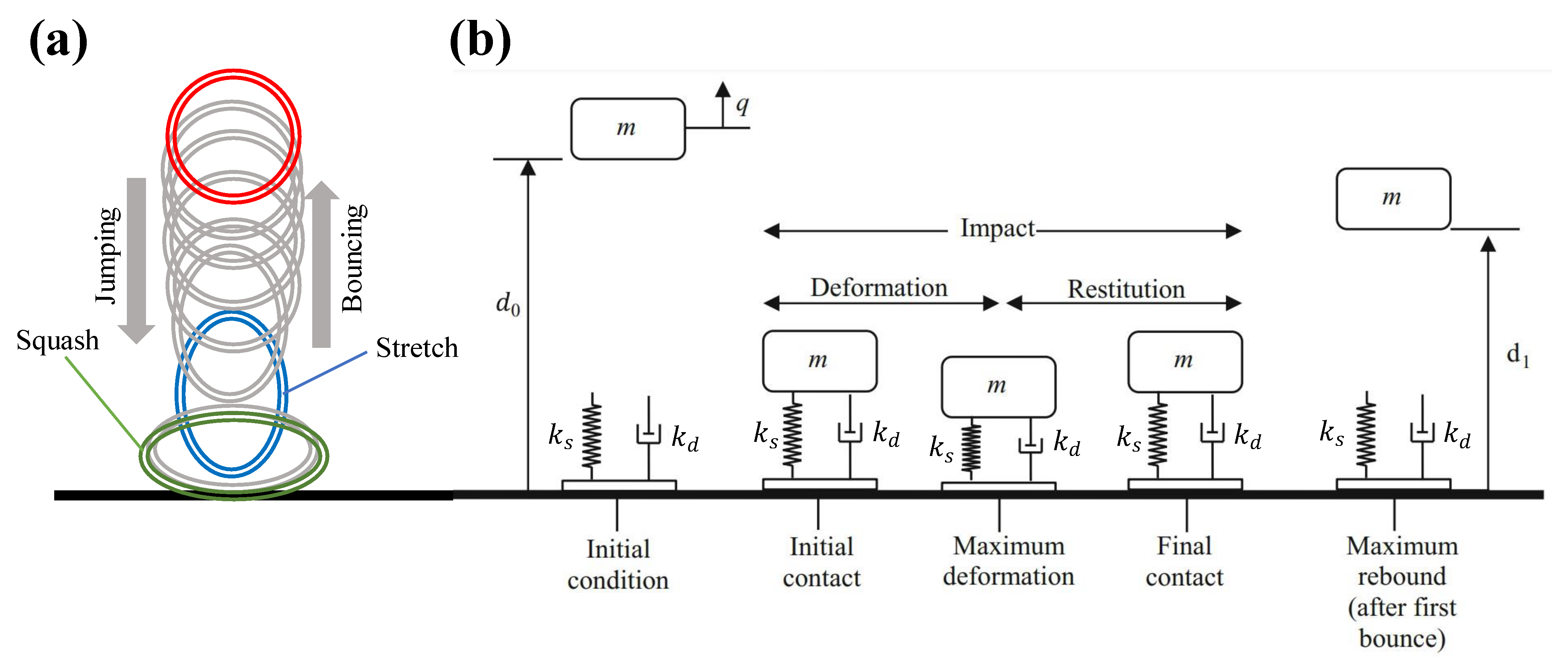
3.2. Nanocomposite Ball Dynamics Tuning Experimental Data
4. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nie, B.; Liu, S.; Qu, Q.; Zhang, Y.; Zhao, M.; Liu, J. Bio-Inspired Flexible Electronics for Smart E-Skin. Acta Biomater. 2022, 139, 280–295. [Google Scholar] [CrossRef] [PubMed]
- Shetti, N.P.; Mishra, A.; Basu, S.; Mascarenhas, R.J.; Kakarla, R.R.; Aminabhavi, T.M. Skin-Patchable Electrodes for Biosensor Applications: A Review. ACS Biomater. Sci. Eng. 2020, 6, 1823–1835. [Google Scholar] [CrossRef]
- Jason, N.N.; Ho, M.D.; Cheng, W. Resistive Electronic Skin. J. Mater. Chem. C 2017, 5, 5845–5866. [Google Scholar] [CrossRef]
- Ponce Wong, R.D.; Posner, J.D.; Santos, V.J. Flexible Microfluidic Normal Force Sensor Skin for Tactile Feedback. Sens. Actuators A Phys. 2012, 179, 62–69. [Google Scholar] [CrossRef]
- Bijender; Kumar, A. Recent Progress in the Fabrication and Applications of Flexible Capacitive and Resistive Pressure Sensors. Sens. Actuators A Phys. 2022, 344, 113770. [Google Scholar] [CrossRef]
- Robles-Linares, J.A.; Ramírez-Cedillo, E.; Siller, H.R.; Rodríguez, C.A.; Martínez-López, J.I. Parametric Modeling of Biomimetic Cortical Bone Microstructure for Additive Manufacturing. Materials 2019, 12, 913. [Google Scholar] [CrossRef] [Green Version]
- DeBoer, B.; Nguyen, N.; Diba, F.; Hosseini, A. Additive, Subtractive, and Formative Manufacturing of Metal Components: A Life Cycle Assessment Comparison. Int. J. Adv. Manuf. Technol. 2021, 115, 413–432. [Google Scholar] [CrossRef]
- Kim, Y.A.; Kamio, S.; Tajiri, T.; Hayashi, T.; Song, S.M.; Endo, M.; Terrones, M.; Dresselhaus, M.S. Enhanced Thermal Conductivity of Carbon Fiber/Phenolic Resin Composites by the Introduction of Carbon Nanotubes. Appl. Phys. Lett. 2007, 90, 093125. [Google Scholar] [CrossRef] [Green Version]
- Blokhin, A.; Zaytsev, I.; Sukhorukov, A.; Stolyarov, R.; Popov, A.; Burmistrov, I.; Kobzev, D.; Yagubov, V. Conductivity of a Carbon Nanotubes-Epoxy Resin Nanocomposite. IOP Conf. Ser. Mater. Sci. Eng. 2019, 693, 012013. [Google Scholar] [CrossRef] [Green Version]
- Cruz-Cruz, I.; Ramírez-Herrera, C.A.; Martínez-Romero, O.; Castillo-Márquez, S.A.; Jiménez-Cedeño, I.H.; Olvera-Trejo, D.; Elías-Zúñiga, A. Influence of Epoxy Resin Curing Kinetics on the Mechanical Properties of Carbon Fiber Composites. Polymers 2022, 14, 1100. [Google Scholar] [CrossRef]
- Mohd Nurazzi, N.; Asyraf, M.R.M.; Khalina, A.; Abdullah, N.; Sabaruddin, F.A.; Kamarudin, S.H.; Ahmad, S.; Mahat, A.M.; Lee, C.L.; Aisyah, H.A.; et al. Fabrication, Functionalization, and Application of Carbon Nanotube-Reinforced Polymer Composite: An Overview. Polymers 2021, 13, 1047. [Google Scholar] [CrossRef] [PubMed]
- Mitusch, S.K.; Funke, S.W.; Kuchta, M. Hybrid FEM-NN Models: Combining Artificial Neural Networks with the Finite Element Method. J. Comput. Phys. 2021, 446, 110651. [Google Scholar] [CrossRef]
- Liu, X.; Tian, S.; Tao, F.; Yu, W. A Review of Artificial Neural Networks in the Constitutive Modeling of Composite Materials. Compos. Part B Eng. 2021, 224, 109152. [Google Scholar] [CrossRef]
- Baurova, N.I.; Konoplin, A.Y. Estimation of the Dynamics of Changing the Properties of Materials Using Neural Network Modeling. Russ. Metall. 2021, 2021, 1713–1718. [Google Scholar] [CrossRef]
- Rigatos, G.G. Advanced Models of Neural Networks: Nonlinear Dynamics and Stochasticity in Biological Neurons. In Advanced Models of Neural Networks: Nonlinear Dynamics and Stochasticity in Biological Neurons; Springer: Berlin/Heidelberg, Germany, 2015; pp. 1–275. [Google Scholar] [CrossRef]
- Coulombe, J.C.; York, M.C.A.; Sylvestre, J. Computing with Networks of Nonlinear Mechanical Oscillators. PLoS ONE 2017, 12, e0178663. [Google Scholar] [CrossRef] [Green Version]
- Rödönyi, G.; Beintema, G.I.; Tóth, R.; Schoukens, M.; Pup, D.; Kisari; Vígh, Z.; Korös, P.; Soumelidis, A.; Bokor, J. Identification of the Nonlinear Steering Dynamics of an Autonomous Vehicle. IFAC-PapersOnLine 2021, 54, 708–713. [Google Scholar] [CrossRef]
- Chen, G.; Shen, Z.; Iyer, A.; Ghumman, U.F.; Tang, S.; Bi, J.; Chen, W.; Li, Y. Machine-Learning-Assisted De Novo Design of Organic Molecules and Polymers: Opportunities and Challenges. Polymers 2020, 12, 163. [Google Scholar] [CrossRef] [Green Version]
- Yousefpour, A.; Jahanshahi, H.; Munoz-Pacheco, J.M.; Bekiros, S.; Wei, Z. A Fractional-Order Hyper-Chaotic Economic System with Transient Chaos. Chaos Solitons Fractals 2020, 130, 109400. [Google Scholar] [CrossRef]
- Wu, L.; Nguyen, V.D.; Kilingar, N.G.; Noels, L. A Recurrent Neural Network-Accelerated Multi-Scale Model for Elasto-Plastic Heterogeneous Materials Subjected to Random Cyclic and Non-Proportional Loading Paths. Comput. Methods Appl. Mech. Eng. 2020, 369, 113234. [Google Scholar] [CrossRef]
- Abueidda, D.W.; Koric, S.; Sobh, N.A.; Sehitoglu, H. Deep Learning for Plasticity and Thermo-Viscoplasticity. Int. J. Plast. 2021, 136, 102852. [Google Scholar] [CrossRef]
- Mozaffar, M.; Bostanabad, R.; Chen, W.; Ehmann, K.; Cao, J.; Bessa, M.A. Deep Learning Predicts Path-Dependent Plasticity. Proc. Natl. Acad. Sci. USA 2019, 116, 26414–26420. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Watts, P.C.P.; Hsu, W.K.; Randall, D.P.; Kroto, H.W.; Walton, D.R.M. Non-Linear Current–Voltage Characteristics of Electrically Conducting Carbon Nanotube–Polystyrene Composites. Phys. Chem. Chem. Phys. 2002, 4, 5655–5662. [Google Scholar] [CrossRef]
- García-Ávila, J.; Rodríguez, C.A.; Vargas-Martínez, A.; Ramírez-Cedillo, E.; Israel Martínez-López, J. E-Skin Development and Prototyping via Soft Tooling and Composites with Silicone Rubber and Carbon Nanotubes. Materials 2021, 15, 256. [Google Scholar] [CrossRef] [PubMed]
- Bonfanti, A.; Kaplan, J.L.; Charras, G.; Kabla, A. Fractional Viscoelastic Models for Power-Law Materials. Soft Matter 2020, 16, 6002–6020. [Google Scholar] [CrossRef]
- Guo, K.; Yang, Z.; Yu, C.-H.; Buehler, M.J. Artificial Intelligence and Machine Learning in Design of Mechanical Materials. Mater. Horiz. 2021, 8, 1153–1172. [Google Scholar] [CrossRef]
- Sanchez-Lengeling, B.; Aspuru-Guzik, A. Inverse Molecular Design Using Machine Learning: Generative Models for Matter Engineering. Science 2018, 361, 360–365. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Grimmer, M.; Holgate, M.; Holgate, R.; Boehler, A.; Ward, J.; Hollander, K.; Sugar, T.; Seyfarth, A. A Powered Prosthetic Ankle Joint for Walking and Running. BioMed. Eng. OnLine 2016, 15, 141. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Schmidhuber, J. Deep Learning in Neural Networks: An Overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Grech, C.; Buzio, M.; Pentella, M.; Sammut, N. Dynamic Ferromagnetic Hysteresis Modelling Using a Preisach-Recurrent Neural Network Model. Materials 2020, 13, 2561. [Google Scholar] [CrossRef]
- Cho, M.Y.; Lee, J.H.; Kim, S.H.; Kim, J.S.; Timilsina, S. An Extremely Inexpensive, Simple, and Flexible Carbon Fiber Electrode for Tunable Elastomeric Piezo-Resistive Sensors and Devices Realized by LSTM RNN. ACS Appl. Mater. Interfaces 2019, 11, 11910–11919. [Google Scholar] [CrossRef] [PubMed]
- Nagurka, M.; Huang, S. A Mass-Spring-Damper Model of a Bouncing Ball. Proc. Am. Control Conf. 2004, 1, 499–504. [Google Scholar] [CrossRef] [Green Version]
- Hubert, M.; Ludewig, F.; Dorbolo, S.; Vandewalle, N. Bouncing Dynamics of a Spring. Phys. D Nonlinear Phenom. 2014, 272, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Chastaing, J.-Y.; Bertin, E.; Géminard, J.-C. Dynamics of a Bouncing Ball. Am. J. Phys. 2015, 83, 518. [Google Scholar] [CrossRef] [Green Version]
- Pizzoli, M.; Saltari, F.; Mastroddi, F.; Martinez-Carrascal, J.; González-Gutiérrez, L.M. Nonlinear Reduced-Order Model for Vertical Sloshing by Employing Neural Networks. Nonlinear Dyn. 2022, 107, 1469–1478. [Google Scholar] [CrossRef]
- Suzuki, K.; Hirai, Y.; Ohzono, T. Oscillating Friction on Shape-Tunable Wrinkles. ACS Appl. Mater. Interfaces 2014, 6, 10121–10131. [Google Scholar] [CrossRef]
- Arunkumar, S. Overview of Small Punch Test. Met. Mater. Int. 2019, 26, 719–738. [Google Scholar] [CrossRef]
- ASTM F2183-02; Standard Test Method for Small Punch Testing of Ultra-High Molecular Weight Polyethylene Used in Surgical Implants. ASTM International: West Conshohocken, PA, USA, 2008.
- Baron, P.A.; Deye, G.J.; Fernback, J.E.; Jones, W.G. Direct-Reading Measurement of Fiber Length/Diameter Distributions; ASTM Special Technical Publication (ASTM): Boulder, CO, USA, 1997; pp. 147–155. [Google Scholar]
- Keras: The Python Deep Learning API. Available online: https://keras.io/ (accessed on 8 October 2022).
- Li, Z.; Xu, H.; Xia, X.; Song, Y.; Zheng, Q. Energy Dissipation Accompanying Mullins Effect of Nitrile Butadiene Rubber/Carbon Black Nanocomposites. Polymer 2019, 171, 106–114. [Google Scholar] [CrossRef]
- Chen, Y.; Linderholt, A.; Abrahamsson, T. An Efficient Simulation Method for Large-Scale Systems with Local Nonlinearities. Conf. Proc. Soc. Exp. Mech. Ser. 2016, 6, 259–267. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Sample I Weight, g (1.5 wt.%) | Sample II Weight, g (1 wt.%) | Sample III Weight, g (0.5 wt.%) | Sample IV Weight, g (0 wt.%) |
|---|---|---|---|---|
| SWCNTs Tuball™ Matrix 601 | 1.8 | 1.2 | 0.6 | 0 |
| Sylgard 184 part A | 107.45 | 108 | 108.54 | 109.09 |
| Sylgard 184 part B | 10.745 | 10.8 | 10.854 | 10.909 |
| Simple Recurrent Neural Network | State-Space Model |
|---|---|
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
García-Ávila, J.; Torres Serrato, D.d.J.; Rodriguez, C.A.; Martínez, A.V.; Cedillo, E.R.; Martínez-López, J.I. Predictive Modeling of Soft Stretchable Nanocomposites Using Recurrent Neural Networks. Polymers 2022, 14, 5290. https://doi.org/10.3390/polym14235290
García-Ávila J, Torres Serrato DdJ, Rodriguez CA, Martínez AV, Cedillo ER, Martínez-López JI. Predictive Modeling of Soft Stretchable Nanocomposites Using Recurrent Neural Networks. Polymers. 2022; 14(23):5290. https://doi.org/10.3390/polym14235290
Chicago/Turabian StyleGarcía-Ávila, Josué, Diego de Jesus Torres Serrato, Ciro A. Rodriguez, Adriana Vargas Martínez, Erick Ramírez Cedillo, and J. Israel Martínez-López. 2022. "Predictive Modeling of Soft Stretchable Nanocomposites Using Recurrent Neural Networks" Polymers 14, no. 23: 5290. https://doi.org/10.3390/polym14235290