
Universal Plasma Jet for Droplet Manipulation on a PDMS Surface towards Wall-Less Scaffolds


Abstract
:1. Introduction
2. Method
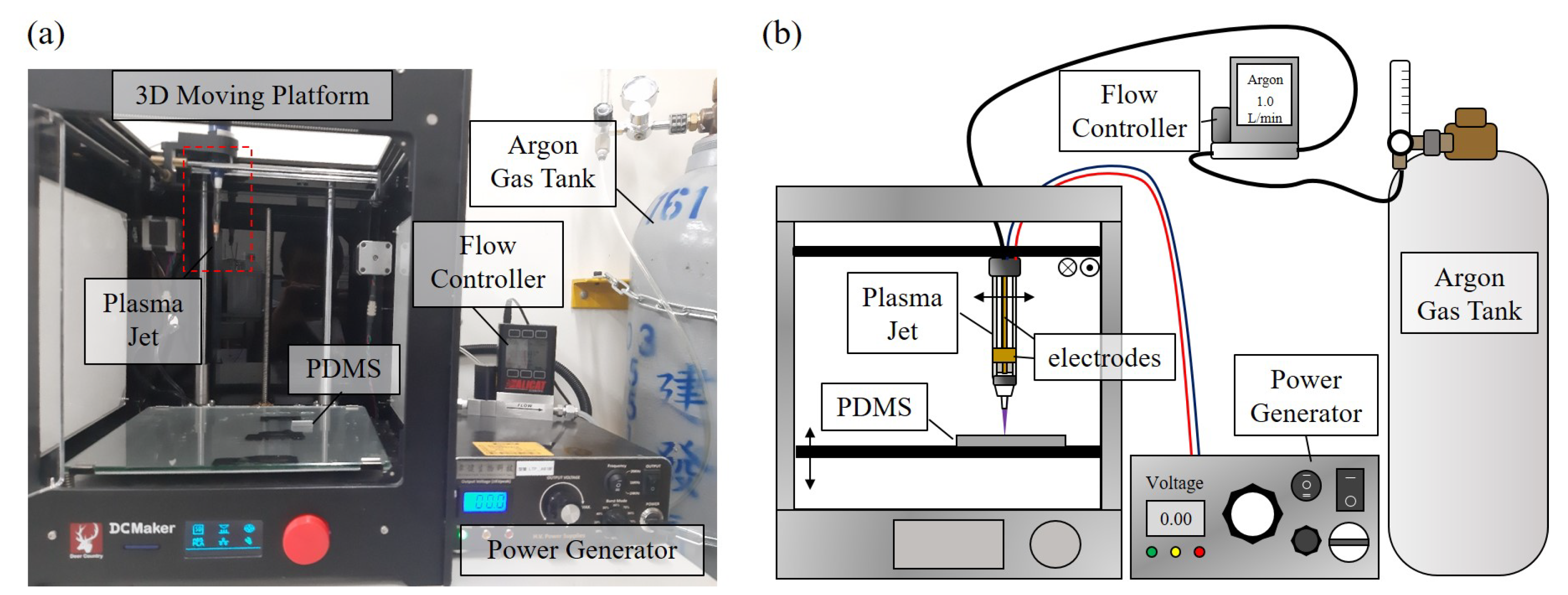
2.1. Experimental Setup
2.2. PDMS for Manipulation Platform
2.3. Drag Force for Droplet Manipulation
2.4. Experimental Procedure
2.4.1. Fabrication of PDMS Chip
2.4.2. Plotting of Droplet Path
2.4.3. Generation and Manipulation of Droplets
2.5. Measurement of Droplet Size
3. Results
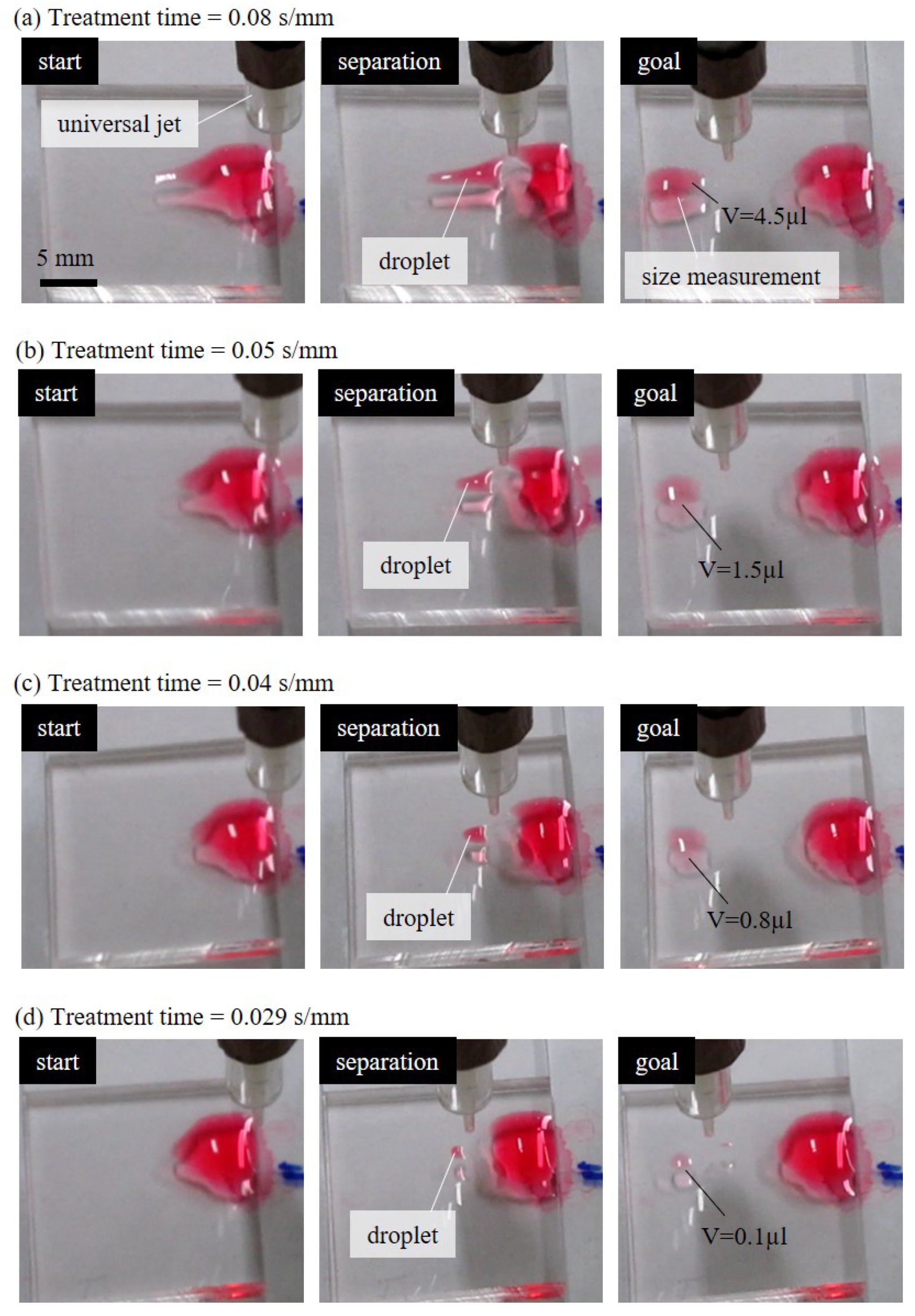
3.1. Effect of Plasma Treatment Time to Droplet Size
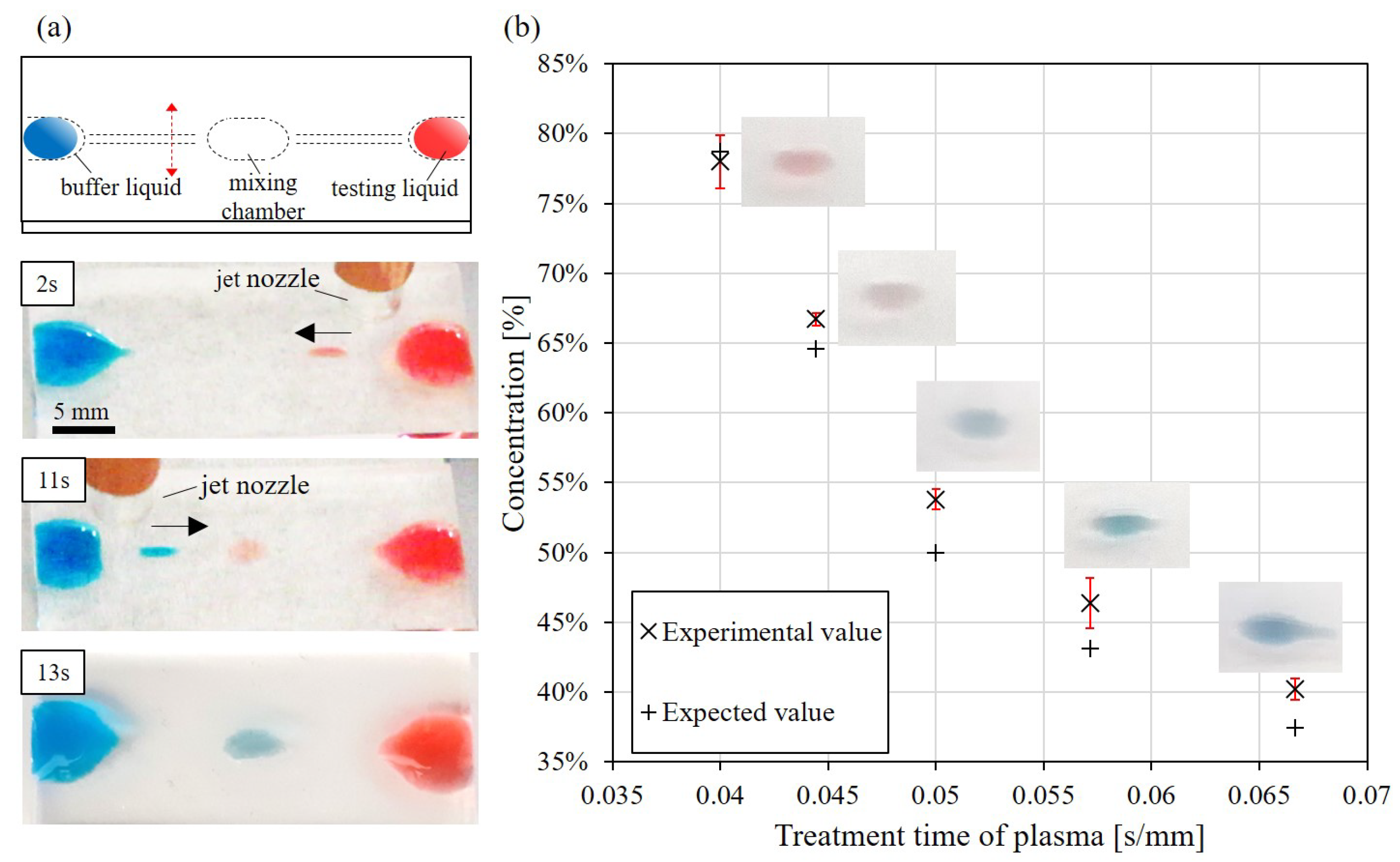
3.2. Droplet Mixing with Controllable Droplet
3.3. FTIR Spectrum on PDMS Surface
4. Discussion
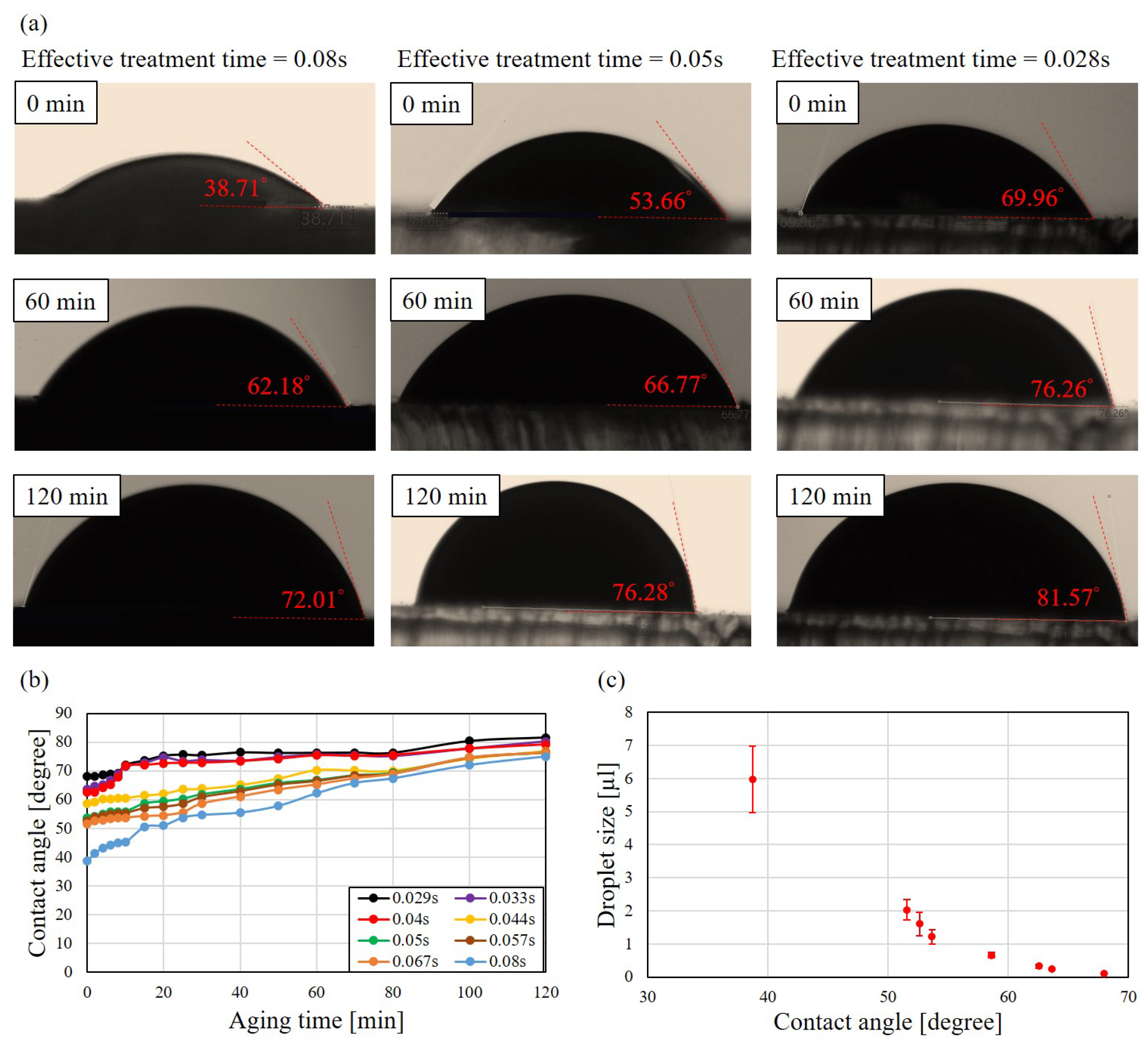
4.1. Aging of Plasma-Treated Surface in Atmosphere
4.2. Aging of Plasma-Treated Surface during Droplet Manipulation
4.3. The Comparison and Limitations
5. Conclusions
- The size of droplet can be controlled by the treatment time of plasma using the universal plasma jet. The relation of droplet size and treatment time of plasma has been experimentally clarified. It shows that shorter treatment time of plasma results in smaller size of manipulated droplet. The largest and the smallest sizes of manipulated droplet are around 6 µL and 0.1 µL, which are achieved by the treatment time of 0.08 s/mm and 0.029 s/mm, respectively.
- An application of mixing two colored liquids has been successfully performed. The difference between the expected concentration and actual concentration are all below 5%, which demonstrates the feasibility of applying the proposed method in an application.
- The aging of the plasma-treated path in both atmosphere and during manipulation have been investigated. The contact angles of channel become larger with the increased aging time and nearly recovers to after 120 min aging time in every tests of treatment time of plasma. The aging is even faster during the manipulation due to the direct contact with droplets.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| APPJ | Atmospheric-Pressure Plasma Jet |
| PDMS | Polydimethylsiloxane |
References
- Shin, D.J.; Wang, T.H. Magnetic droplet manipulation platforms for nucleic acid detection at the point of care. Ann. Biomed. Eng. 2014, 42, 2289–2302. [Google Scholar] [CrossRef]
- Malic, L.; Brassard, D.; Veres, T.; Tabrizian, M. Integration and detection of biochemical assays in digital microfluidic LOC devices. Lab A Chip 2010, 10, 418–431. [Google Scholar] [CrossRef]
- Shikida, M.; Takayanagi, K.; Inouchi, K.; Honda, H.; Sato, K. Using wettability and interfacial tension to handle droplets of magnetic beads in a micro-chemical-analysis system. Sens. Actuators B Chem. 2006, 113, 563–569. [Google Scholar] [CrossRef]
- Wang, Y.B.; Huang, J.H.; Lee, M.S.; Huang, C.Y.; Huang, C.S.; Yamashita, I.; Tu, Y.Y.; Hsu, W. An EWOD-based micro diluter with high flexibility on dilution ratio. Microsyst. Technol. 2017, 23, 3645–3651. [Google Scholar] [CrossRef]
- Moon, H.; Cho, S.K.; Garrell, R.L.; Kim, C.J. Low voltage electrowetting-on-dielectric. J. Appl. Phys. 2002, 92, 4080–4087. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, T.H. Full-range magnetic manipulation of droplets via surface energy traps enables complex bioassays. Adv. Mater. 2013, 25, 2903–2908. [Google Scholar] [CrossRef] [PubMed]
- Long, Z.; Shetty, A.M.; Solomon, M.J.; Larson, R.G. Fundamentals of magnet-actuated droplet manipulation on an open hydrophobic surface. Lab A Chip 2009, 9, 1567–1575. [Google Scholar] [CrossRef] [PubMed]
- Huang, G.; Li, M.; Yang, Q.; Li, Y.; Liu, H.; Yang, H.; Xu, F. Magnetically actuated droplet manipulation and its potential biomedical applications. ACS Appl. Mater. Interfaces 2017, 9, 1155–1166. [Google Scholar] [CrossRef]
- Wang, Z.; Zhe, J. Recent advances in particle and droplet manipulation for lab-on-a-chip devices based on surface acoustic waves. Lab A Chip 2011, 11, 1280–1285. [Google Scholar] [CrossRef] [PubMed]
- Sesen, M.; Alan, T.; Neild, A. Microfluidic on-demand droplet merging using surface acoustic waves. Lab A Chip 2014, 14, 3325–3333. [Google Scholar] [CrossRef] [PubMed]
- Park, S.Y.; Kalim, S.; Callahan, C.; Teitell, M.A.; Chiou, E.P. A light-induced dielectrophoretic droplet manipulation platform. Lab A Chip 2009, 9, 3228–3235. [Google Scholar] [CrossRef] [PubMed]
- Ahn, K.; Kerbage, C.; Hunt, T.P.; Westervelt, R.; Link, D.R.; Weitz, D.A. Dielectrophoretic manipulation of drops for high-speed microfluidic sorting devices. Appl. Phys. Lett. 2006, 88, 024104. [Google Scholar] [CrossRef] [Green Version]
- Park, S.Y.; Teitell, M.A.; Chiou, E.P. Single-sided continuous optoelectrowetting (SCOEW) for droplet manipulation with light patterns. Lab A Chip 2010, 10, 1655–1661. [Google Scholar] [CrossRef] [PubMed]
- Jiang, D.; Park, S.Y. Light-driven 3D droplet manipulation on flexible optoelectrowetting devices fabricated by a simple spin-coating method. Lab A Chip 2016, 16, 1831–1839. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.; Li, G.; Man, J.; Zhang, S.; Li, J.; Li, J.; Li, D. Fabrication of Microspheres from High-Viscosity Bioink Using a Novel Microfluidic-Based 3D Bioprinting Nozzle. Micromachines 2020, 11, 681. [Google Scholar] [CrossRef] [PubMed]
- Du, G.S.; Pan, J.Z.; Zhao, S.P.; Zhu, Y.; den Toonder, J.M.; Fang, Q. Cell-based drug combination screening with a microfluidic droplet array system. Anal. Chem. 2013, 85, 6740–6747. [Google Scholar] [CrossRef]
- Hutmacher, D.W. Scaffold design and fabrication technologies for engineering tissues—State of the art and future perspectives. J. Biomater. Sci. Polym. Ed. 2001, 12, 107–124. [Google Scholar] [CrossRef]
- Chen, Q.; Utech, S.; Chen, D.; Prodanovic, R.; Lin, J.M.; Weitz, D.A. Controlled assembly of heterotypic cells in a core–shell scaffold: Organ in a droplet. Lab A Chip 2016, 16, 1346–1349. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Um, E.; Lee, D.S.; Pyo, H.B.; Park, J.K. Continuous generation of hydrogel beads and encapsulation of biological materials using a microfluidic droplet-merging channel. Microfluid. Nanofluid. 2008, 5, 541–549. [Google Scholar] [CrossRef]
- Li, C.Y.; Hu, M.H.; Hu, J.J. Use of aligned microscale sacrificial fibers in creating biomimetic, anisotropic poly (glycerol sebacate) scaffolds. Polymers 2019, 11, 1492. [Google Scholar] [CrossRef] [Green Version]
- Wu, S.T.; Huang, C.Y.; Weng, C.C.; Chang, C.C.; Li, B.R.; Hsu, C.S. Rapid Prototyping of an Open-Surface Microfluidic Platform Using Wettability-Patterned Surfaces Prepared by an Atmospheric-Pressure Plasma Jet. ACS Omega 2019, 4, 16292–16299. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Morrissette, J.M.; Mahapatra, P.S.; Ghosh, A.; Ganguly, R.; Megaridis, C.M. Rapid, self-driven liquid mixing on open-surface microfluidic platforms. Sci. Rep. 2017, 7, 1–13. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nguyen, P.Q.; Yeo, L.P.; Lok, B.K.; Lam, Y.C. Patterned surface with controllable wettability for inkjet printing of flexible printed electronics. ACS Appl. Mater. Interfaces 2014, 6, 4011–4016. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Kouno, M.; Saito, N.; Nae, F.A.; Inoue, Y.; Takai, O. Patterned hydrophobic—Hydrophilic templates made from microwave-plasma enhanced chemical vapor deposited thin films. Thin Solid Films 2007, 515, 4203–4208. [Google Scholar] [CrossRef]
- Huang, C.; Wu, S.Y.; Chang, Y.C. Synthesis of organosilicon film on polycarbonate by means of low-temperature atmospheric-pressure plasma jet. IEEE Trans. Plasma Sci. 2010, 38, 1101–1105. [Google Scholar] [CrossRef]
- Shaw, D.; West, A.; Bredin, J.; Wagenaars, E. Mechanisms behind surface modification of polypropylene film using an atmospheric-pressure plasma jet. Plasma Sources Sci. Technol. 2016, 25, 065018. [Google Scholar] [CrossRef]
- Lai, J.; Sunderland, B.; Xue, J.; Yan, S.; Zhao, W.; Folkard, M.; Michael, B.D.; Wang, Y. Study on hydrophilicity of polymer surfaces improved by plasma treatment. Appl. Surf. Sci. 2006, 252, 3375–3379. [Google Scholar] [CrossRef]
- Shao, T.; Zhou, Y.; Zhang, C.; Yang, W.; Niu, Z.; Ren, C. Surface modification of polymethyl-methacrylate using atmospheric pressure argon plasma jets to improve surface flashover performance in vacuum. IEEE Trans. Dielectr. Electr. Insul. 2015, 22, 1747–1754. [Google Scholar] [CrossRef]
- Bagiatis, V.; Critchlow, G.; Price, D.; Wang, S. The effect of atmospheric pressure plasma treatment (APPT) on the adhesive bonding of poly (methyl methacrylate)(PMMA)-to-glass using a polydimethylsiloxane (PDMS)-based adhesive. Int. J. Adhes. Adhes. 2019, 95, 102405. [Google Scholar] [CrossRef]
- Dey, A.; Lopez, A.; Filipič, G.; Jayan, A.; Nordlund, D.; Koehne, J.; Krishnamurthy, S.; Gandhiraman, R.P.; Meyyappan, M. Plasma jet based in situ reduction of copper oxide in direct write printing. J. Vac. Sci. Technol. B Nanotechnol. Microelectron. Mater. Process. Meas. Phenom. 2019, 37, 031203. [Google Scholar] [CrossRef] [Green Version]
- Fang, J.; Levchenko, I.; Mai-Prochnow, A.; Keidar, M.; Cvelbar, U.; Filipic, G.; Han, Z.J.; Ostrikov, K.K. Protein retention on plasma-treated hierarchical nanoscale gold-silver platform. Sci. Rep. 2015, 5, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Kim, M.; Song, D.; Shin, H.; Baeg, S.H.; Kim, G.; Boo, J.H.; Han, J.; Yang, S. Surface modification for hydrophilic property of stainless steel treated by atmospheric-pressure plasma jet. Surf. Coat. Technol. 2003, 171, 312–316. [Google Scholar] [CrossRef]
- Thomas, M.; Herrmann, A.; Dohse, A.; Borris, J.; Weidlich, E.R. Printing of μm structures with nano inks using a novel combination of high-resolution plasma printing and subsequent rotogravure printing. Plasma Process. Polym. 2019, 16, 1900080. [Google Scholar] [CrossRef]
- Liu, J.; Song, J.; Wang, G.; Chen, F.; Liu, S.; Yang, X.; Sun, J.; Zheng, H.; Huang, L.; Jin, Z.; et al. Maskless hydrophilic patterning of the superhydrophobic aluminum surface by an atmospheric pressure microplasma jet for water adhesion controlling. ACS Appl. Mater. Interfaces 2018, 10, 7497–7503. [Google Scholar] [CrossRef] [PubMed]
- Wu, M.C.; Liao, C.W.; Lin, Z.H.; Yang, C.M.; Cheng, Y.P.; Wu, J.S. Experimental investigation of sterilization efficacy of green nails symptom and gray nails using an argon-based round atmospheric-pressure plasma jet. Biomed. Phys. Eng. Express 2019, 5, 025034. [Google Scholar] [CrossRef]
- Cheng, K.Y.; Lin, Z.H.; Cheng, Y.P.; Chiu, H.Y.; Yeh, N.L.; Wu, T.K.; Wu, J.S. Wound healing in streptozotocin-induced diabetic rats using atmospheric-pressure argon plasma jet. Sci. Rep. 2018, 8, 1–15. [Google Scholar]
- Patelli, A.; Mussano, F.; Brun, P.; Genova, T.; Ambrosi, E.; Michieli, N.; Mattei, G.; Scopece, P.; Moroni, L. Nanoroughness, surface chemistry, and drug delivery control by atmospheric plasma jet on implantable devices. ACS Appl. Mater. Interfaces 2018, 10, 39512–39523. [Google Scholar] [CrossRef] [Green Version]
- Lin, Z.H.; Tschang, C.Y.T.; Liao, K.C.; Su, C.F.; Wu, J.S.; Ho, M.T. Ar/O2 argon-based round atmospheric-pressure plasma jet on sterilizing bacteria and endospores. IEEE Trans. Plasma Sci. 2016, 44, 3140–3147. [Google Scholar] [CrossRef]
- Yu, Y.S.; Wu, M.C.; Wu, J.S.; Tsai, C.H.D. Rapid Prototyping of Microfluidic Channel using Atmospheric Pressure Plasma Jet. In Proceedings of the 22nd International Conference on Miniaturized Systems for Chemistry and Life Sciences, MicroTAS 2018, Kaohsiung, Taiwan, 11–15 November 2018; pp. 551–554. [Google Scholar]
- Yu, Y.S.; Kuo, L.H.; Wu, M.C.; Wu, J.S.; Tsai, C.H.D. A Novel Fabrication of PDMS Chip using Atmospheric Pressure Plasma Jet: Hydrophobicity Modification and Feasibility Test. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 278–283. [Google Scholar]
- Owen, M.J.; Smith, P.J. Plasma treatment of polydimethylsiloxane. J. Adhes. Sci. Technol. 1994, 8, 1063–1075. [Google Scholar] [CrossRef]
- Ng, J.M.; Gitlin, I.; Stroock, A.D.; Whitesides, G.M. Components for integrated poly (dimethylsiloxane) microfluidic systems. Electrophoresis 2002, 23, 3461–3473. [Google Scholar] [CrossRef]
- Berthier, E.; Young, E.W.; Beebe, D. Engineers are from PDMS-land, Biologists are from Polystyrenia. Lab A Chip 2012, 12, 1224–1237. [Google Scholar] [CrossRef]
- Kim, K.; Kim, G.; Oh, Y.; Park, T.G.; Han, D.C.; Yang, S.S. Simple atmospheric-pressure nonthermal plasma-jet system for poly (dimethylsiloxane) bonding process. Jpn. J. Appl. Phys. 2012, 51, 06FL15. [Google Scholar] [CrossRef]
- Bhattacharya, S.; Datta, A.; Berg, J.M.; Gangopadhyay, S. Studies on surface wettability of poly (dimethyl) siloxane (PDMS) and glass under oxygen-plasma treatment and correlation with bond strength. J. Microelectromech. Syst. 2005, 14, 590–597. [Google Scholar] [CrossRef]
- Oliveira, N.M.; Neto, A.I.; Song, W.; Mano, J.F. Two-dimensional open microfluidic devices by tuning the wettability on patterned superhydrophobic polymeric surface. Appl. Phys. Express 2010, 3, 085205. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Song, J.; Lu, Y.; Chen, F.; Zheng, H.; Yang, X.; Liu, X.; Sun, J.; Carmalt, C.J.; Parkin, I.P.; et al. Underwater spontaneous pumpless transportation of nonpolar organic liquids on extreme wettability patterns. ACS Appl. Mater. Interfaces 2016, 8, 2942–2949. [Google Scholar] [CrossRef]
- Eid, K.; Panth, M.; Sommers, A. The physics of water droplets on surfaces: Exploring the effects of roughness and surface chemistry. Eur. J. Phys. 2018, 39, 025804. [Google Scholar] [CrossRef]
- Peng, S.; Williams, R.A. Controlled production of emulsions using a crossflow membrane: Part I: Droplet formation from a single pore. Chem. Eng. Res. Des. 1998, 76, 894–901. [Google Scholar] [CrossRef]
- Fan, J.; Wilson, M.; Kapur, N. Displacement of liquid droplets on a surface by a shearing air flow. J. Colloid Interface Sci. 2011, 356, 286–292. [Google Scholar] [CrossRef] [PubMed]
- Subramanian, R.S.; Moumen, N.; McLaughlin, J.B. Motion of a drop on a solid surface due to a wettability gradient. Langmuir 2005, 21, 11844–11849. [Google Scholar] [CrossRef] [PubMed]
- O’Neill, M.E. A slow motion of viscous liquid caused by a slowly moving solid sphere. Mathematika 1964, 11, 67–74. [Google Scholar] [CrossRef]
- Lee, M.S.; Hsu, W.; Huang, H.Y.; Tseng, H.Y.; Lee, C.T.; Hsu, C.Y.; Shieh, Y.C.; Wang, S.H.; Yao, D.J.; Liu, C.H. Simultaneous detection of two growth factors from human single-embryo culture medium by a bead-based digital microfluidic chip. Biosens. Bioelectron. 2020, 150, 111851. [Google Scholar] [CrossRef]
- Kim, H.T.; Jeong, O.C. PDMS surface modification using atmospheric pressure plasma. Microelectron. Eng. 2011, 88, 2281–2285. [Google Scholar] [CrossRef]
- Hui, A.Y.; Wang, G.; Lin, B.; Chan, W.T. Microwave plasma treatment of polymer surface for irreversible sealing of microfluidic devices. Lab A Chip 2005, 5, 1173–1177. [Google Scholar] [CrossRef]
- Hillborg, H.; Gedde, U. Hydrophobicity recovery of polydimethylsiloxane after exposure to corona discharges. Polymer 1998, 39, 1991–1998. [Google Scholar] [CrossRef]
- Bodas, D.; Khan-Malek, C. Hydrophilization and hydrophobic recovery of PDMS by oxygen plasma and chemical treatment—An SEM investigation. Sens. Actuators B Chem. 2007, 123, 368–373. [Google Scholar] [CrossRef]
- Murakami, T.; Kuroda, S.I.; Osawa, Z. Dynamics of polymeric solid surfaces treated with oxygen plasma: Effect of aging media after plasma treatment. J. Colloid Interface Sci. 1998, 202, 37–44. [Google Scholar] [CrossRef]
- Nelson, W.C.; Kim, C.J. Droplet actuation by electrowetting-on-dielectric (EWOD): A review. J. Adhes. Sci. Technol. 2012, 26, 1747–1771. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Nguyen, N.T. Magnetic digital microfluidics—A review. Lab A Chip 2017, 17, 994–1008. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Universal Plasma Jet (Proposed) | Electrowetting on Dielectric (EWOD) | Magnetic-Controlled Droplet | |
|---|---|---|---|
| mechanism | surface treatment and hydrodynamic force | electrical wetting and pressure gradient | magnetic force on particles or fluid |
| droplet size | submicrolitre to microliters | picolitre to tens of microliters | submicrolitre to tens of microliters |
| fabrication time of platform | few seconds for path plotting | several days for multilayer structure | minutes/hours for surface coating and magnets arrangement |
| cost | low air or selected gas | high multilayer and electrodes fabrication | medium magnetic beads/fluid |
| features | can directly apply on polymeric substrate functional radicals | accurate control no need pumps/valves no need fluid pathways | particles can be used as functional substrate can be manually operated |
| Ref | This work | Nelson and Kim 2012 [59] | Zhang and Nguyen [60] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Peng, C.-Y.; Tsai, C.-H.D. Universal Plasma Jet for Droplet Manipulation on a PDMS Surface towards Wall-Less Scaffolds. Polymers 2021, 13, 1321. https://doi.org/10.3390/polym13081321
Peng C-Y, Tsai C-HD. Universal Plasma Jet for Droplet Manipulation on a PDMS Surface towards Wall-Less Scaffolds. Polymers. 2021; 13(8):1321. https://doi.org/10.3390/polym13081321
Chicago/Turabian StylePeng, Cheng-Yun, and Chia-Hung Dylan Tsai. 2021. "Universal Plasma Jet for Droplet Manipulation on a PDMS Surface towards Wall-Less Scaffolds" Polymers 13, no. 8: 1321. https://doi.org/10.3390/polym13081321