
Effect of Geometric Error on Friction Behavior of Cylinder Seals


Abstract
:
1. Introduction
2. Experiment Setup
2.1. Sealing Ring Friction
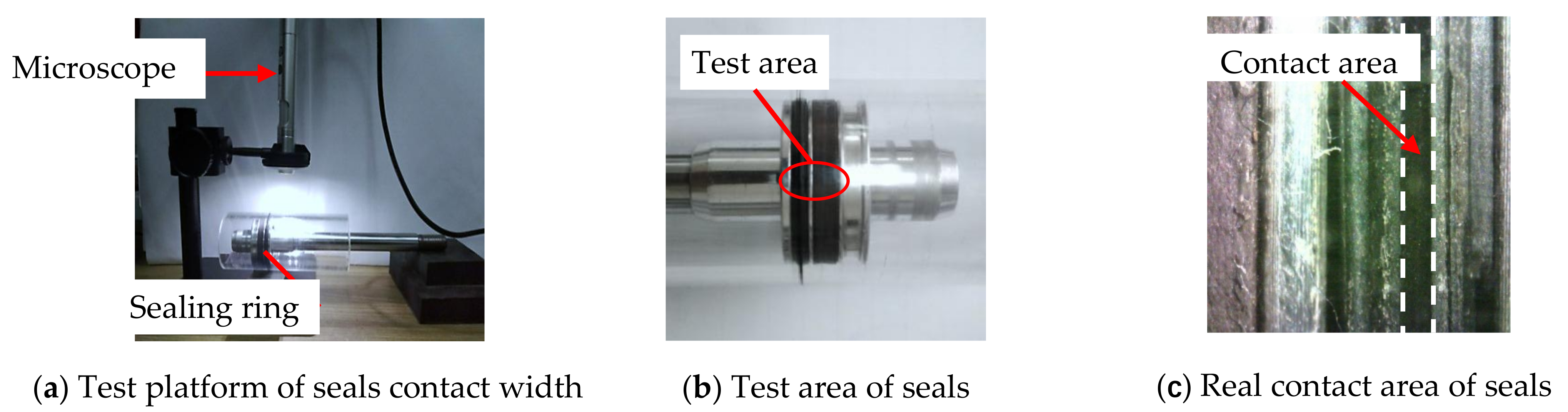
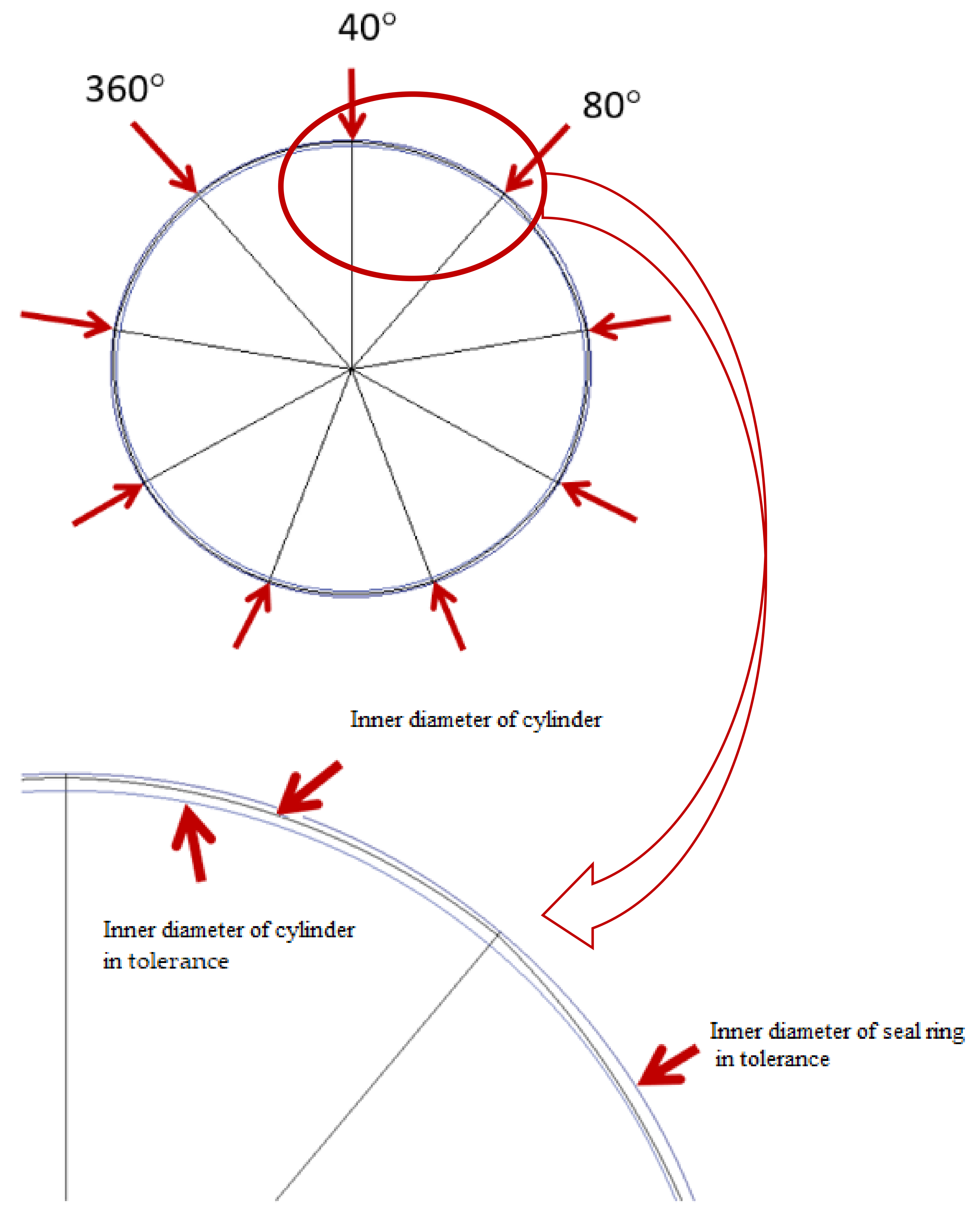
2.2. Contact Width of the Sealing Ring
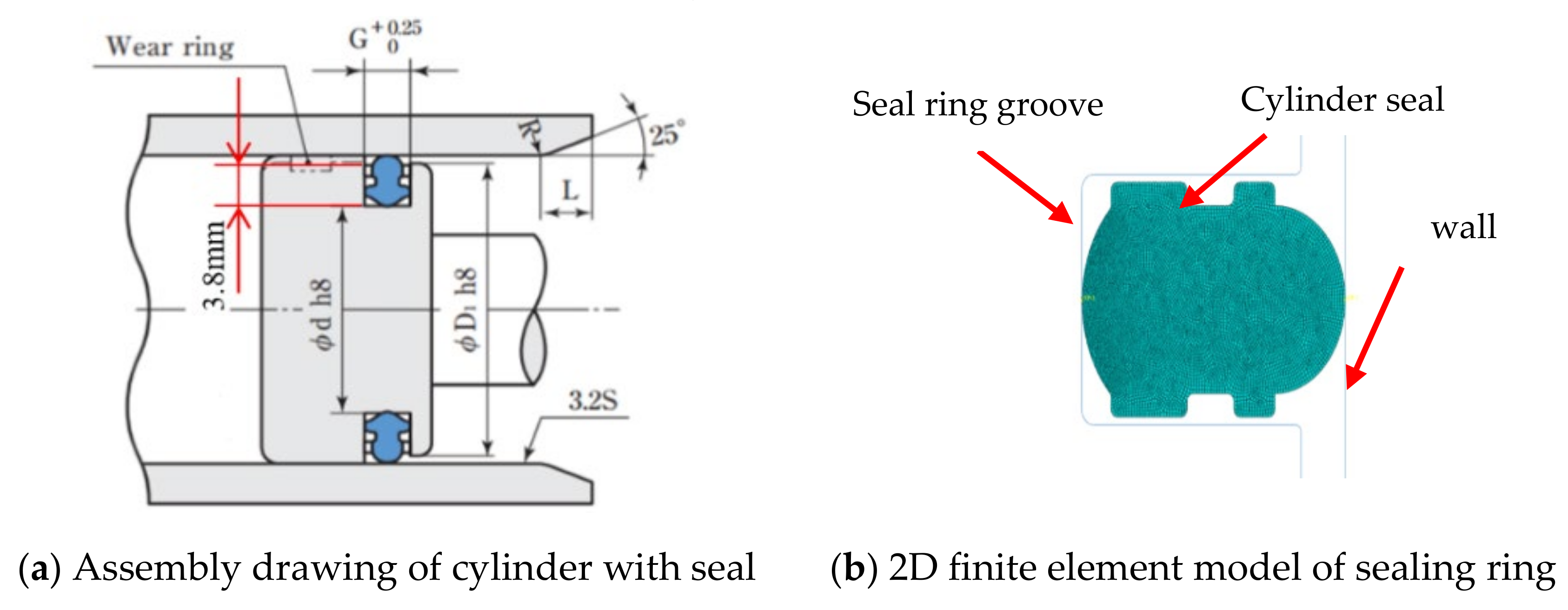
3. Finite Element Model
3.1. Constitutive Model
3.2. Meshing and Boundary
4. Results and Discussion
4.1. Contact Width
4.2. Synergy Effects on Friction Behavior
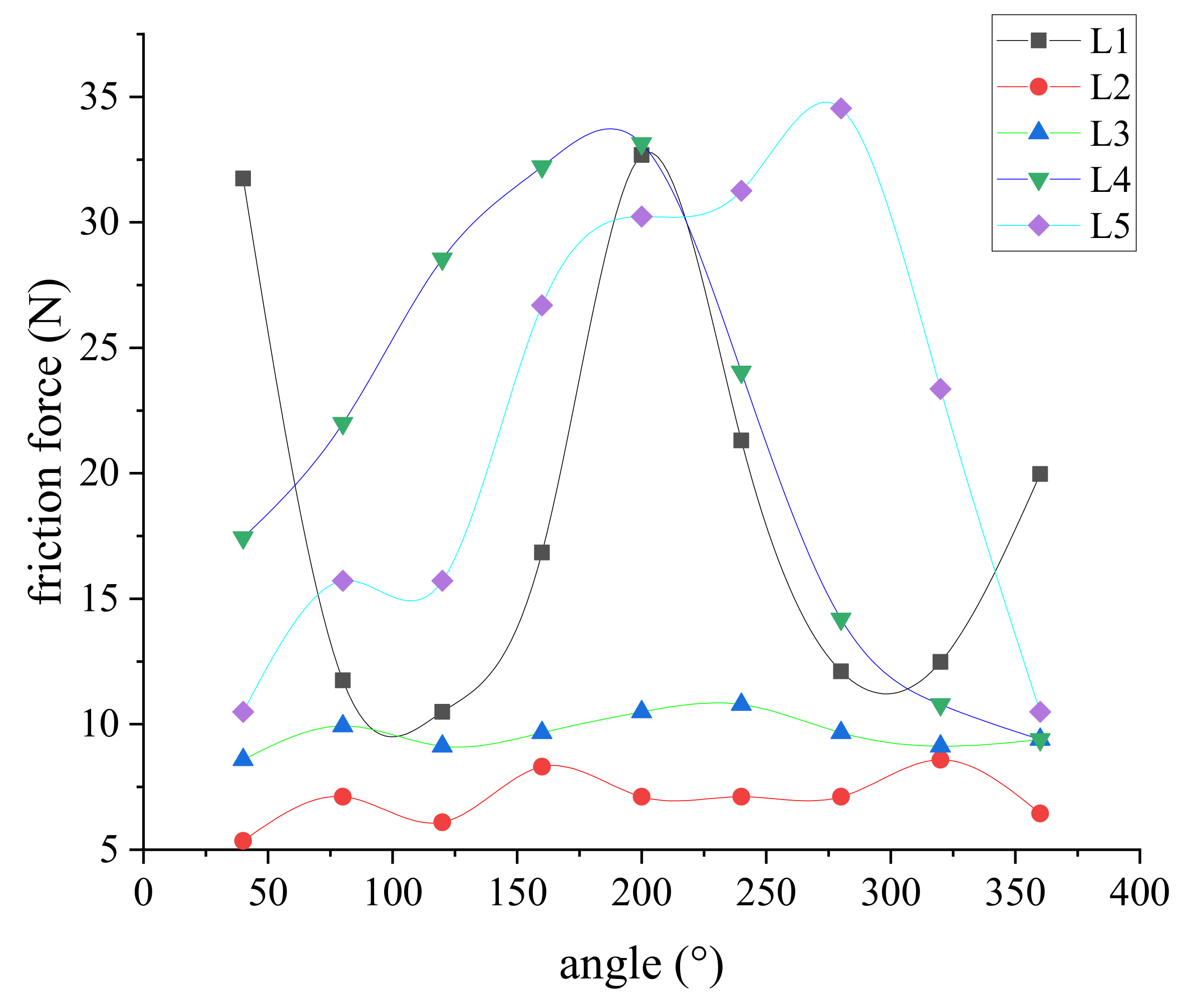
4.3. Friction Force
5. Conclusions
- (1)
- A measurement platform for the contact width of the seal ring has been developed. Here, five test points in the axial direction and nine test points in the circumferential direction were used in measuring the contact width. Results indicate that the synergy effects of roundness and straightness have great influence on the friction force; the friction force increases when the contact width increases.
- (2)
- A finite element model of cylinder seals in the friction process has been developed for studying friction behavior. Results indicate that the predicted friction force is dependent on the measured results; the contact width in the sliding process is less than that in the static state of the cylinder.
- (3)
- The friction behavior of rubber seals considering geometric errors has been revealed by the combined method of experiment and finite element simulation, which are useful methods for the design of cylinder geometry precision and seal structure.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Menezes, P.L.; Kailas, S.V.; Lovell, M.R. Influence of Surface Texture and Roughness of Softer and Harder Counter Materials on Friction During Sliding. J. Mater. Eng. Perform. 2015, 24, 393–403. [Google Scholar] [CrossRef]
- Tomanik, E.; El Mansori, M.; Souza, R.; Profito, F. Effect of waviness and roughness on cylinder liner friction. Tribol. Int. 2018, 120, 547–555. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Zeng, L.; Zheng, F. Friction performance and optimisation of diamond-like texture on hydraulic cylinder surface. Micro Nano Lett. 2018, 13, 1001–1006. [Google Scholar] [CrossRef]
- Ma, W.; Liu, Q.; Macdonald, J.H.G.; Yan, X.; Zheng, Y. The effect of surface roughness on aerodynamic forces and vibrations for a circular cylinder in the critical Reynolds number range. J. Wind Eng. Ind. Aerodyn. 2019, 187, 61–72. [Google Scholar] [CrossRef] [Green Version]
- Dai, B.; Li, M.; Ma, Y. Effect of surface roughness on liquid friction and transition characteristics in micro- and mini-channels. Appl. Therm. Eng. 2014, 67, 283–293. [Google Scholar] [CrossRef]
- Gu, C.; Zhang, D. Modeling and prediction of the running-in behavior of the piston ring pack system based on the stochastic surface roughness. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2019, 233, 1857–1877. [Google Scholar] [CrossRef]
- Liu, W.; Li, L.; Kochhar, A.K. A method for assessing geometrical errors in layered manufacturing. Part 1: Error interaction and transfer mechanisms. Int. J. Adv. Manuf. Syst. 1998, 14, 637–643. [Google Scholar] [CrossRef]
- Wakasawa, Y.; Kohashi, Y.; Ayada, N.; Yanada, H. Experimental Study of Friction Characteristics of Pneumatic Cylinders. Int. J. Fluid Power 2019, 11, 110–116. [Google Scholar] [CrossRef]
- Wang, H.; Leaney, P.G. A New Friction Model in Hybrid Pump-Controlled Asymmetric (Single-Rod) Cylinder Drive System. Tribol. Trans. 2020, 63, 867–878. [Google Scholar] [CrossRef]
- Bifeng, Y.; Jiajun, Z.; Bo, X.; Gongyin, H.; Manying, Y. Friction and Wear Performance of Double-bump Design of Piston Skirt Main Thrust Side. Int. J. Automot. Technol. 2020, 21, 1579–1586. [Google Scholar]
- Dardanelli, A.; Alli, G.; Savaresi, S.M. Modeling and control of an electro-***mechanical brake-by-wire actuator for a sport motorbike. IFAC Proc. Vol. 2010, 43, 524–531. [Google Scholar] [CrossRef]
- Udaykant Jadav, P.; Amali, R.; Adetoro, O.B. Analytical friction model for sliding bodies with coupled longitudinal and transverse vibration. Trib. Int. 2018, 126, 240–248. [Google Scholar] [CrossRef]
- Kim, G.-H.; Yoon, G.-S.; Lee, J.-W.; Kim, H.-K.; Cho, M.-W. A study on the micro-endmilling surface prediction model with non-dynamic errors. Int. J. Precis. Eng. 2012, 13, 2035–2041. [Google Scholar] [CrossRef]
- Jin, L.; Wang, Q. Positioning control of hydraulic cylinder with unknown friction using on/off directional control valve. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2018, 232, 983–993. [Google Scholar] [CrossRef]
- Feng, H.; Qiao, W.; Yin, C.; Yu, H.; Cao, D. Identification and compensation of non-linear friction for a electro-hydraulic system. Mech. Mach. Theory 2019, 141, 1–13. [Google Scholar] [CrossRef]
- Mishra, P.C. Tribodynamic modeling of piston compression ring and cylinder liner conjunction in high-pressure zone of engine cycle. Int. J. Adv. Manuf. Syst. 2013, 66, 1075–1085. [Google Scholar] [CrossRef]
- Zhao, L.; Sun, J.; Yang, H.; Wang, T. Position control of a rodless cylinder in pneumatic servo with actuator saturation. ISA Trans. 2019, 90, 235–243. [Google Scholar] [CrossRef]
- Simon Züst, S.; Paul, P.; Weiss, L.; Wegener, K. Modelling and Compensation of Thermally Induced Positioning Errors in a High Precision Positioning Application ** Founded by the Commission for Technology and Innovation (CTI) and the Swiss National Science Foundation (SNSF). IFAC PapersOnLine 2016, 49, 347–353. [Google Scholar] [CrossRef]
- Tran, X.B.; Nguyen, V.L.; Tran, K.D. Effects of friction models on simulation of pneumatic cylinder. Mech. Sci. 2019, 10, 517–528. [Google Scholar] [CrossRef]
- Li, X.; Yue, B.; Wang, D.; Liang, Y.; Sun, D. Dynamic characteristics of two cylinders’ joint surfaces based on fractal theory. Int. J. Mech. Robot. 2016, 3, 113–128. [Google Scholar]
- Tran, X.B.; Khaing, W.H.; Endo, H.; Yanada, H. Effect of friction model on simulation of hydraulic actuator. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2014, 228, 690–698. [Google Scholar] [CrossRef]
- Meng, D.; Tao, G.; Liu, H.; Zhu, X. Adaptive Robust Motion Trajectory Tracking Control of Pneumatic Cylinders with LuGre Model-based Friction Compensation. Chin. J. Rock Mech. Eng. 2014, 27, 802–815. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| C10 | C20 | C30 |
|---|---|---|
| 2.0028 | −0.3328 | 0.4841 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, A.; Wu, J.; Li, H.; Li, Z.; Su, B.; Wang, Y. Effect of Geometric Error on Friction Behavior of Cylinder Seals. Polymers 2021, 13, 3438. https://doi.org/10.3390/polym13193438
Lin A, Wu J, Li H, Li Z, Su B, Wang Y. Effect of Geometric Error on Friction Behavior of Cylinder Seals. Polymers. 2021; 13(19):3438. https://doi.org/10.3390/polym13193438
Chicago/Turabian StyleLin, Ange, Jian Wu, Haohao Li, Zhe Li, Benlong Su, and Youshan Wang. 2021. "Effect of Geometric Error on Friction Behavior of Cylinder Seals" Polymers 13, no. 19: 3438. https://doi.org/10.3390/polym13193438