1. Introduction
Semiflexible polymers are macromolecules with a finite bending stiffness. Some of the most important biomolecules, such as DNA or the structural elements of the cytoskeleton (F-actin, microtubules, intermediate filaments), are natural semiflexible polymers [
1]. DNA nanotudes or carbon nanotubes are synthetic ones. A widely used minimal theoretical model of semiflexible polymers is the wormlike chain model (WLC), which represents the polymer by a one-dimensional, locally inextensible, fluctuating curve with bending stiffness [
2,
3]. The physical properties of the WLC are determined by the interplay of bending energy and conformational entropy [
4].
Bending is a defining property of semiflexible polymers, and its measurement is an experimental task of central importance. In the case of double-stranded (ds) DNA, various techniques have been used in order to measure the bending angle, ranging from gel shift electrophoresis [
5] to atomic force microscopy [
6]. Recently, Fygenson et al. introduced a novel physical method to measure the bending angle with minimal sample preparation, direct visualization, and straightforward analysis procedures [
7,
8]. It involves the assembly of semiflexible “nunchucks”, composed of two long DNA nanotubes of large bending stiffness end-linked by a short segment of dsDNA, which acts as a hinge. The whole structure is confined between two glass plates. The fluctuations of the two arms are visualized through fluorescent video microscopy. The nunchuck arrangement effectively magnifies the bending fluctuations of the linking dsDNA segment.
Besides the dsDNA bending measuring nanodevice, the nunchuck geometry appears in several other cases. Defects in dsDNA, such as denaturation bubbles (regions where the two strands separate) [
9,
10,
11] or nicks (discontinuities of the double stranded structure, exposing a single strand), can be viewed as hinges facilitating bending. dsDNA is much stiffer to bending than ssDNA. Assuming a hinge defect with a long lifetime (quenched), the nunchuck geometry is a coarse representation of dsDNA with such a defect. The semiflexible nunchuck may also be viewed as an elementary structural element of end-linked stiff polymer networks. Another realization of the nunchuck geometry would be a pair of end-linked F-actin filamnets. Cross-linked F-actin filaments with very short dangling ends effectively fall in this category. The bending stiffness of the nunchuck link, in the case of DNA nanotubes or dsDNA, can be controlled by the length of the linking segment or defect (bubble, nick), respectively. In the case of F-actin, there is a plethora of actin binding proteins (ABPs) with different bending stiffness [
12,
13].
In this article, we analytically investigate various aspects of the conformations of semiflexible nunchucks. It is organized as folllows. In
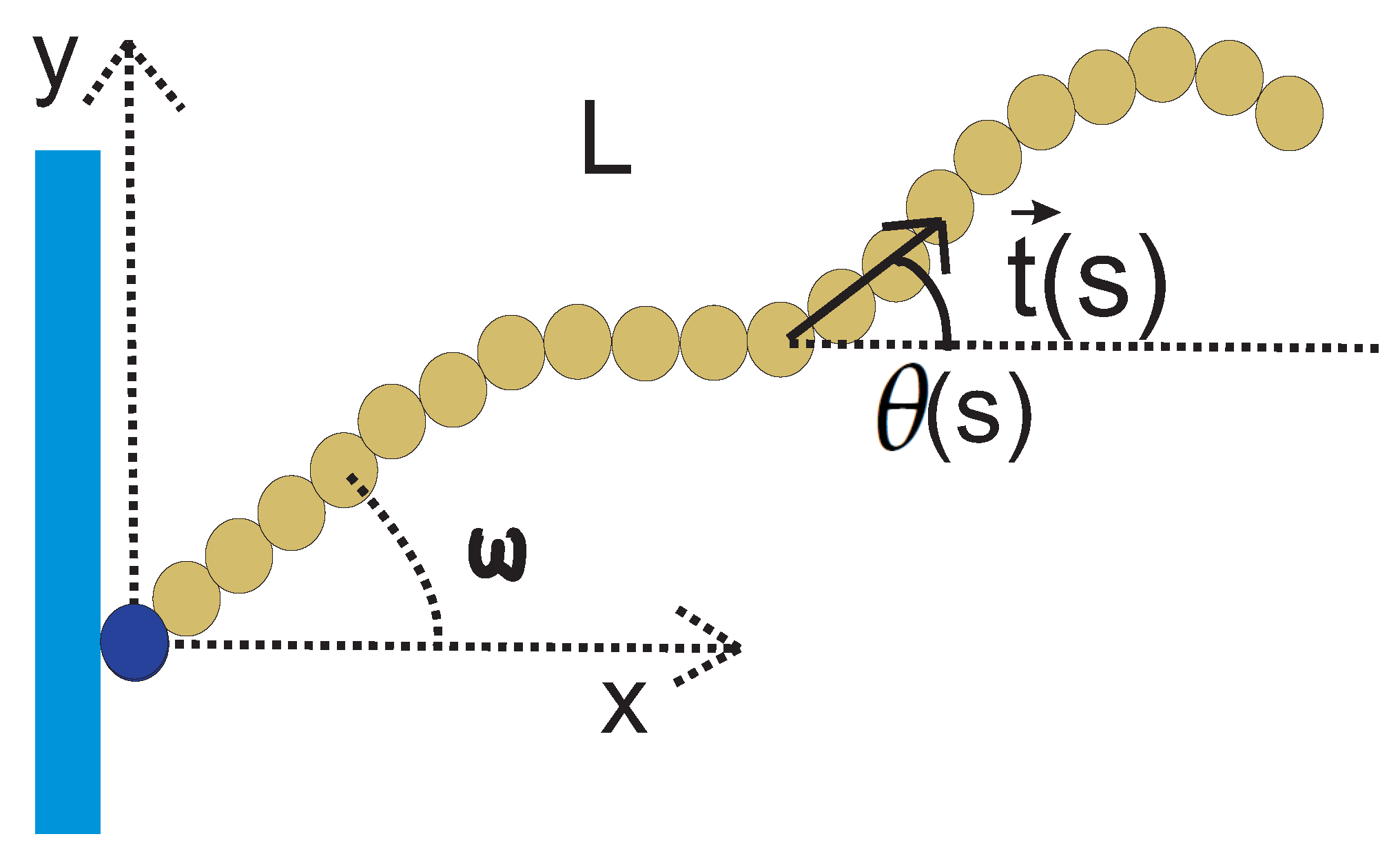
Section 1, we present some general theoretical results for the conformations of a wormlike chain in two dimensions. We obtain the distribution of bending fluctuations both for a uniform chain and for a chain consisting of three parts, each with a different bending stiffness. The latter is a theoretical model of a semiflexible nunchuck. In the stiff (weakly bending) limit, we present the joint distribution of positional-orientational fluctuations of a uniform chain. In
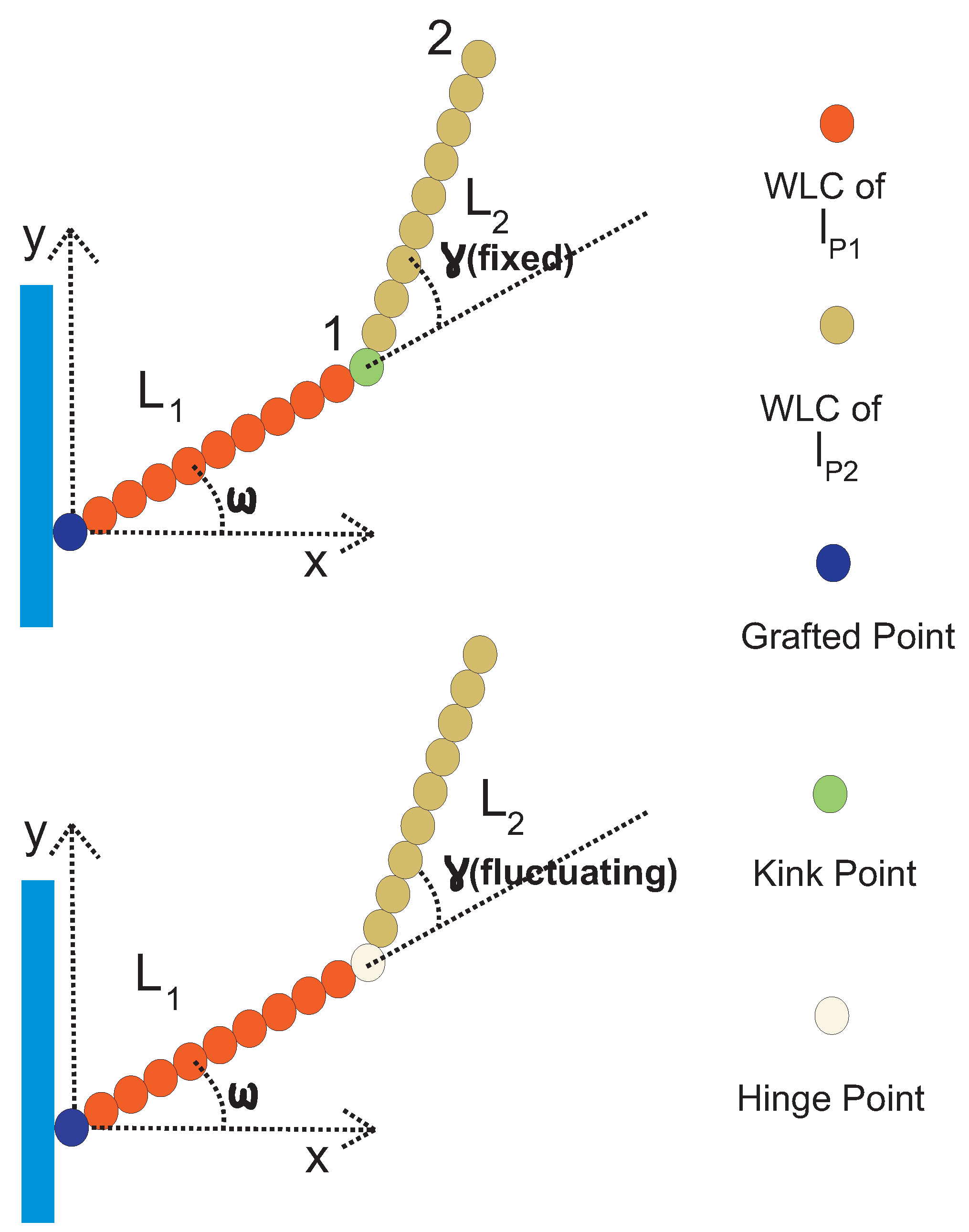
Section 2, we derive the conformational probabilities of the free end for a grafted system of two weakly bending semiflexible chains end-linked together for two cases. First, we consider a stiff link forming a kink. Then we consider an aligning link (hinge), which acts as an orientational harmonic spring. We show that, under certain conditions, there is a pronounced bimodality in the distribution of transverse positional fluctuations. In
Section 3, we discuss how steric repulsion (excluded volume interaction) between the two arms of a nunchuck with stiff arms would change the distribution of bending fluctuations. In
Section 4, we consider the response of a semiflexible nunchuck to a tensile force applied at its ends. We show that, under certain conditions, there is bimodality in the response as a function of the position of the hinge position: stiffening, softening, and stiffening. We summarize and conclude in
Section 5.
4. Rigid-Rod Nunchuck with Excluded Volume Interaction
In our analysis so far, we have assumed that the system does not experience any excluded volume interaction. In
Section 3.2, we integrate the hinge angle
from
to
, assuming that the two arms of the nunchuck can twist on top of each other. A more realistic approach would be to take into account the excluded volume interaction. Calculating conformational distributions with excluded volume interaction is a very challenging problem, which goes beyond the scope of the present article. However, we can do that for the simple case of a nunchuck that consists of two arms of infinite bending stiffness and a harmonic hinge. In that case, the conformations of the system are determined by the hinge angle, which is confined to fluctuate in the range
.
We consider the hinge as a WLC whose orientational fluctuations obey the diffusion-like equation, Equation (
3). In
Section 2.1, we showed that if the range of the bending angle is from
to
, the distribution is Gaussian. If the range of fluctuations is restricted because of the excluded volume interaction of the nunchuck arms, we have to impose absorbing boundary conditions to the “diffusion” process [
35]. We consider the geometry of
Figure 1 with the “starting” angle
. In order to solve Equation (
3), we use a factorization ansatz,
which yields the eigenfunction equation
The eigenfunctions of the harmonic oscillator are sines and cosines, and those consistent with the absorbing boundary conditions,
are cosines,
, with
The solution of Equation (
3) with absorbing boundary conditions reads
where
is the normalization prefactor,
The standard deviation of the hinge angle in the nunchucks of Reference [
7] lies in the interval
, which corresponds to a flexibility
in the interval
. If we plot
as Gaussian from Equation (
7) and as the solution of the diffusion equation with absorbing boundary conditions from Equation (
32), we do not see any noticeable difference for
. For
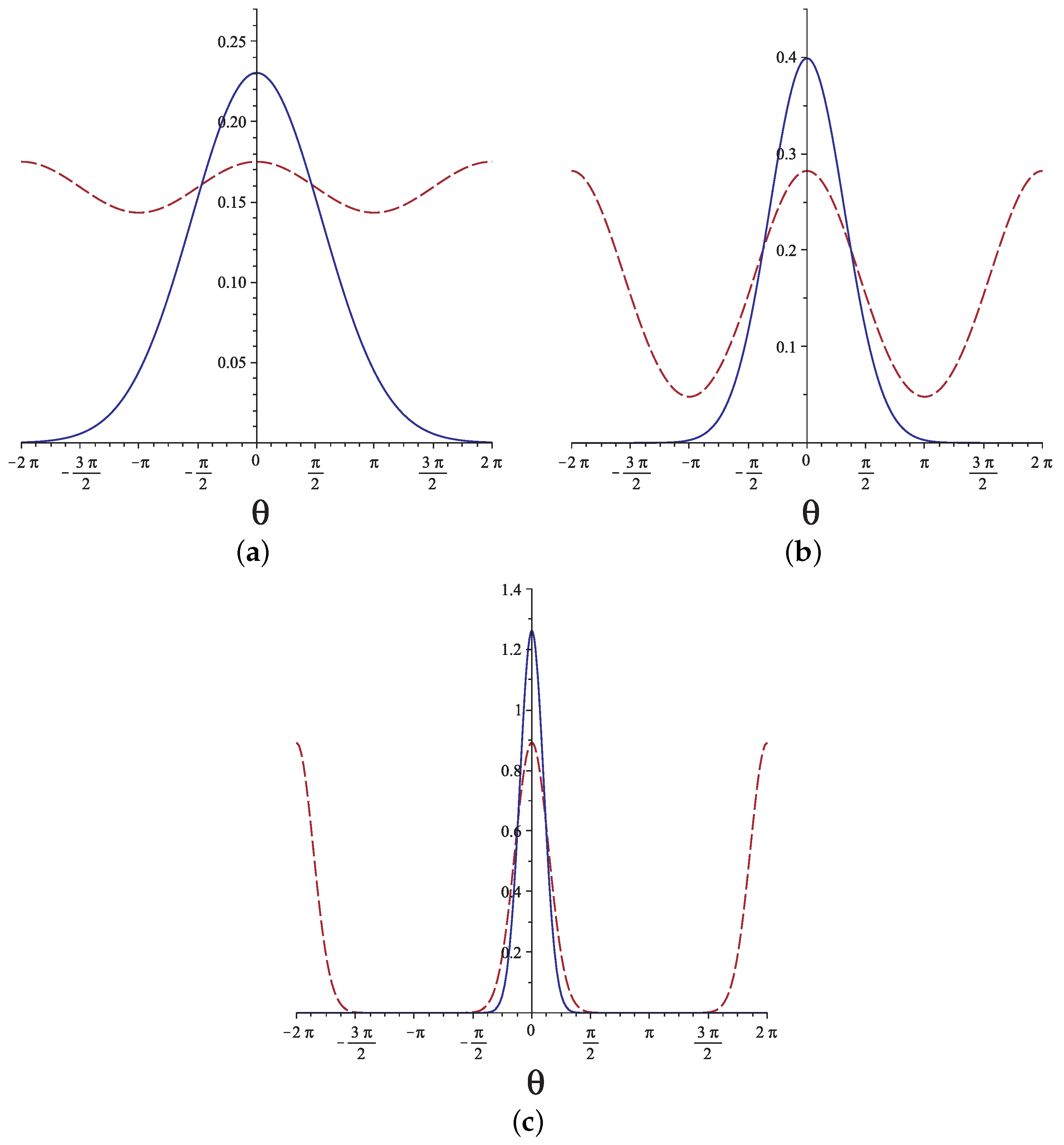
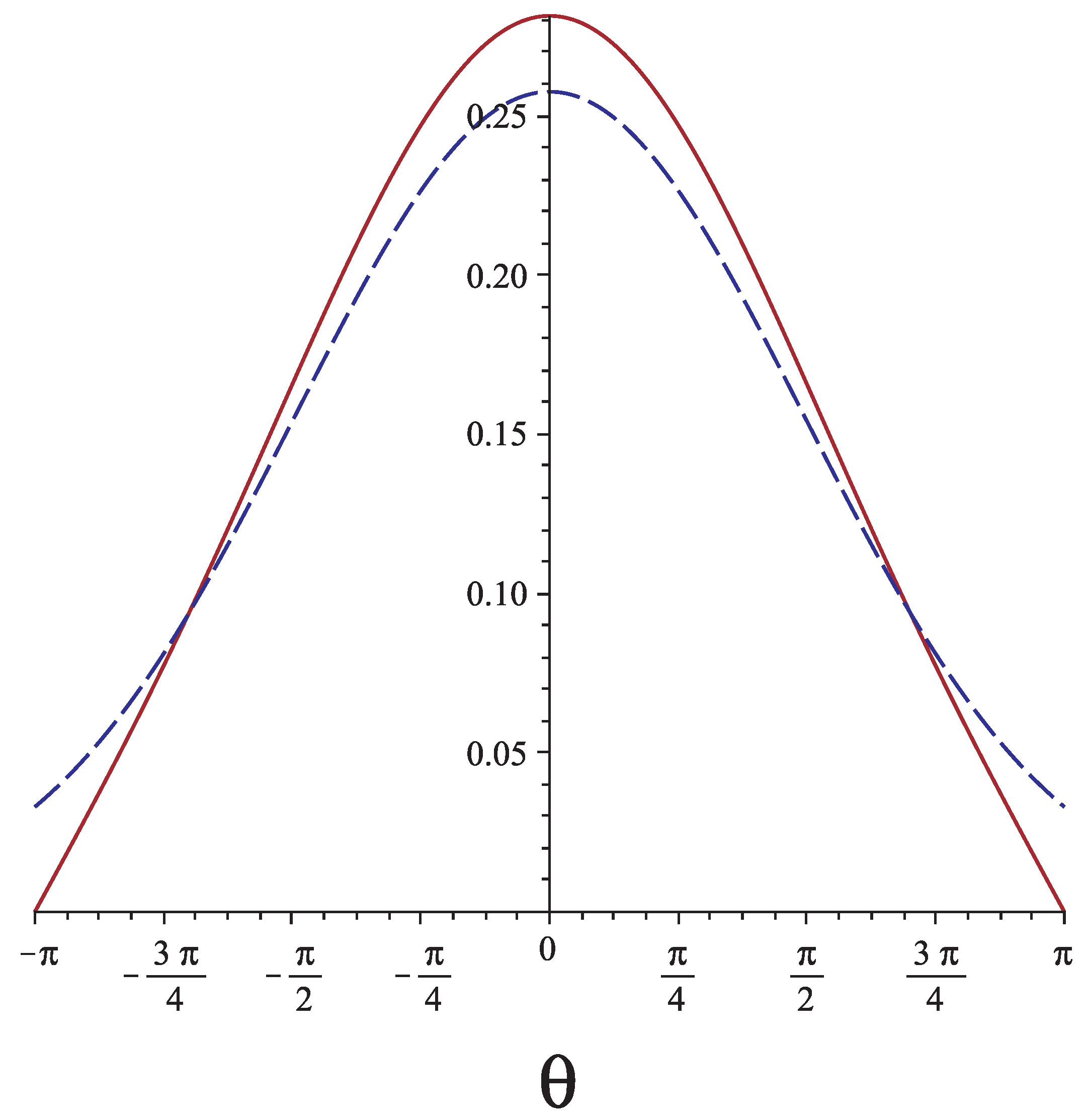
, the discrepancy caused by the boundary conditions is small but noticeable. In
Figure 6, we plot the bending distribution according to the usual Gaussian, Equation (
7), against that of Equation (
32) for
, and we see a significant discrepancy.
We point out that modeling the excluded volume interaction between the two rigid arms of the nunchuck via absorbing boundary conditions for the orientational distribution of the hinge WLC,
, is an approximation even for infinitely long arms. The absorbing boundary conditions that we assume in order to obtain Equation (
32) apply to the orientational conformations
over the entire contour length
of the WLC and not just the end point. Thus, they become unrealistic for a flexible hinge with
. On the other hand, a flexible hinge would trivially yield a uniform distribution. Therefore, we conclude that Equation (
32) is a good approximation for hinge links with
.
5. Bimodality in the Tensile Elasticity of a Semiflexible Nunchuck
We consider a nunchuck in two dimensions, consisting of two rigid arms of length
and
, jointed by a fully flexible hinge and subjected to a tensile force
(
). The partition function reads
where
is the modified Bessel function of the first kind of order
n. The force-extension relation is obtained by taking the derivative,
where
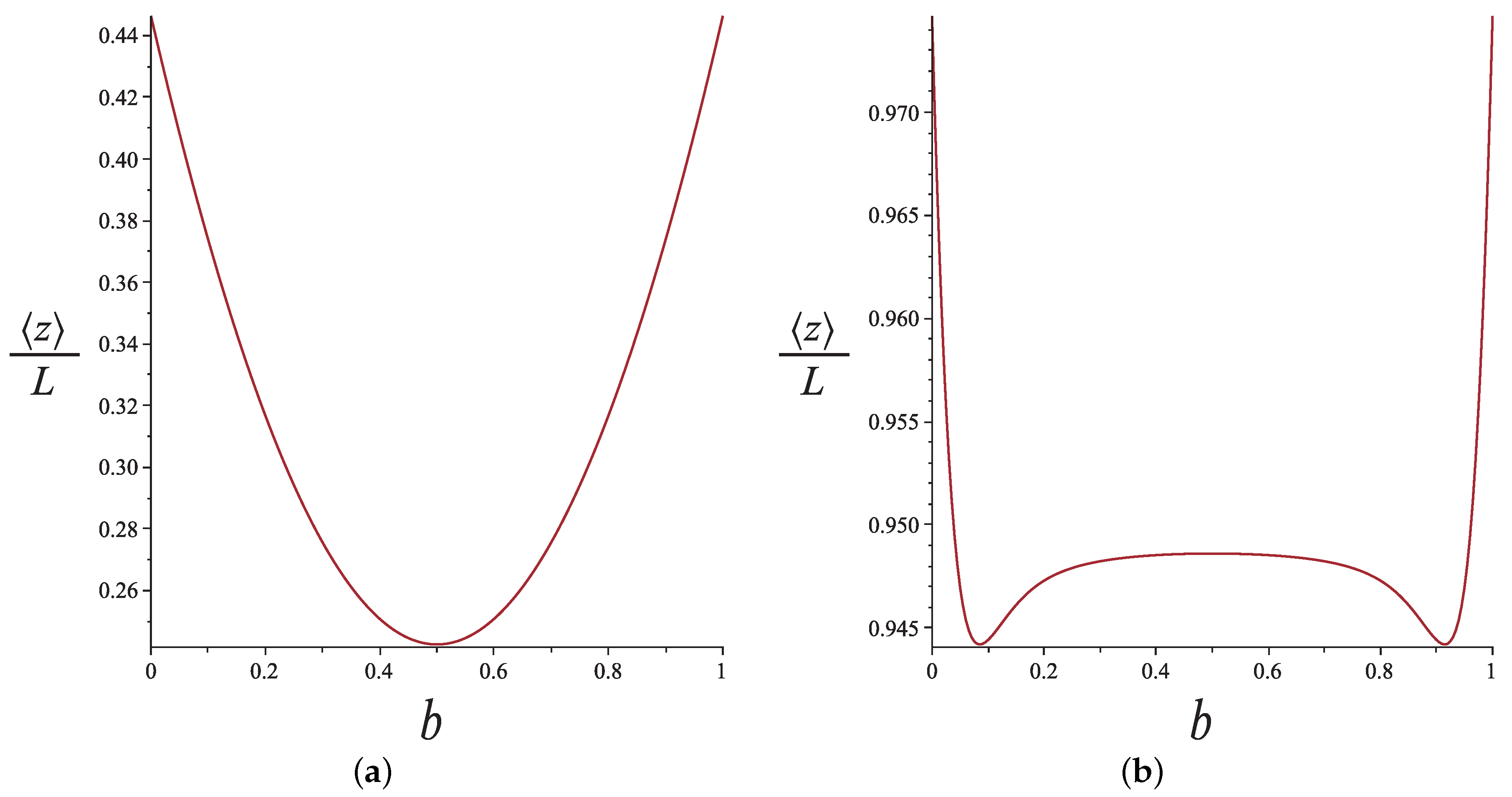
is the average end-to-end distance in the direction of the force. If we plot
as a function of the hinge position
b as we do in
Figure 7, we get a single minimum at the middle
for small forces and a pronounced bimodality for higher forces. We can understand this as follows. For a strong tension, the long arm of the nunchuck is weakly tilting. On the other hand, the short arm reaches a length
such that
and fluctuates very strongly, causing the end-to-end distance to shrink before it gets back to its value corresponding to a single rod as
.
This should be contrasted with the elastic response in three dimensions. In that case, the partition function reads
The corresponding force-extension relation is
If we plot as a function of the hinge position b, we always get a convex function with a single minimum at the middle, . We can rigorously confirm this by calculating its second derivative and checking its sign. The markedly different behavior from the two dimensional case is due to the extra space that is available to the strongly fluctuating small arm of the nunchuck. More specifically, for the weakly tilting long arm, we have decoupling of the two transverse dimensions. Thus, the corresponding contribution to the entropic elasticity is twice that of the two-dimensional case. On the other hand, the small segment responds linearly, and the corresponding tensile compliance in is times that in . The increase in the fluctuations of the long arm overshadows the contribution from the short arm, and this results in a convex curve.
Let us now consider a nunchuck with semiflexible arms. In Reference [
36], the force-extension relation of a semiflexible nunchuck with a hinge modeled as an orientational harmonic spring is calculated analytically, in the weakly bending approximation. (We point out that the weakly bending approximation may hold because of a strong tensile force or because of a large bending stiffness.) Adapting that result for a flexible hinge in two dimensions, we obtain
where the dimensionless force is defined as
. It can also be written as
with
. This result is based on the force-extension relation of an intact WLC of contour length
L with free hinged–hinged boundary conditions (in the weakly bending approximation) [
19,
36,
37],
In order to understand the physical meaning of the tension-dependent characteristic length
, we compare the strong stretching limit of a WLC with that of a freely jointed chain (FJC) in two dimensions. To the leading order, the WLC yields
while the FJC yields
is the bending stiffness of the WLC, and
l is the elementary segment (link) length of the FJC. Comparing the two expressions, we see that, under strong stretching, a WLC behaves as a FJC with a tension-dependent link length equal to
. Thus
plays the role of an orientational correlation length for a WLC under strong tension.
If we plot the extension of a hinged WLC under strong tension (
) from Equation (
38) as a function of the hinge position, we see that it exhibits a plateau and decreases as the hinge approaches the end points. The decrease is significant within a contour distance
from the end points. This is understood because the small segment at the end fluctuates strongly. However, there is a problem with this result. As
b approaches 0 or 1, we should recover the result of the intact chain. The reason behind this apparent inconsistency is the breakdown of the weakly bending approximation for the small segment at the end. For a WLC with
subject to tension, the extension given by Equation (
39), which is based on the weakly bending approximation, vanishes at
, and it turns negative for smaller forces. In order to remedy this problem, we consider the small segment at the end of the nunchuck as a rigid rod freely jointed to the weakly bending WLC. We recall that the force-extension relation of freely rotating rigid rod of length
L in two dimensions is
We point out that this is a general result and holds even beyond the weakly bending approximation. For a small segment at the end with length
, the tensional energy becomes comparable to or smaller than the thermal energy,
, and that makes it fluctuate strongly. If we combine this with the force-extension relation of the weakly bending WLC of length
, we obtain
We can easily see that for
, we recover the extension of the intact WLC (without a hinge) with contour length
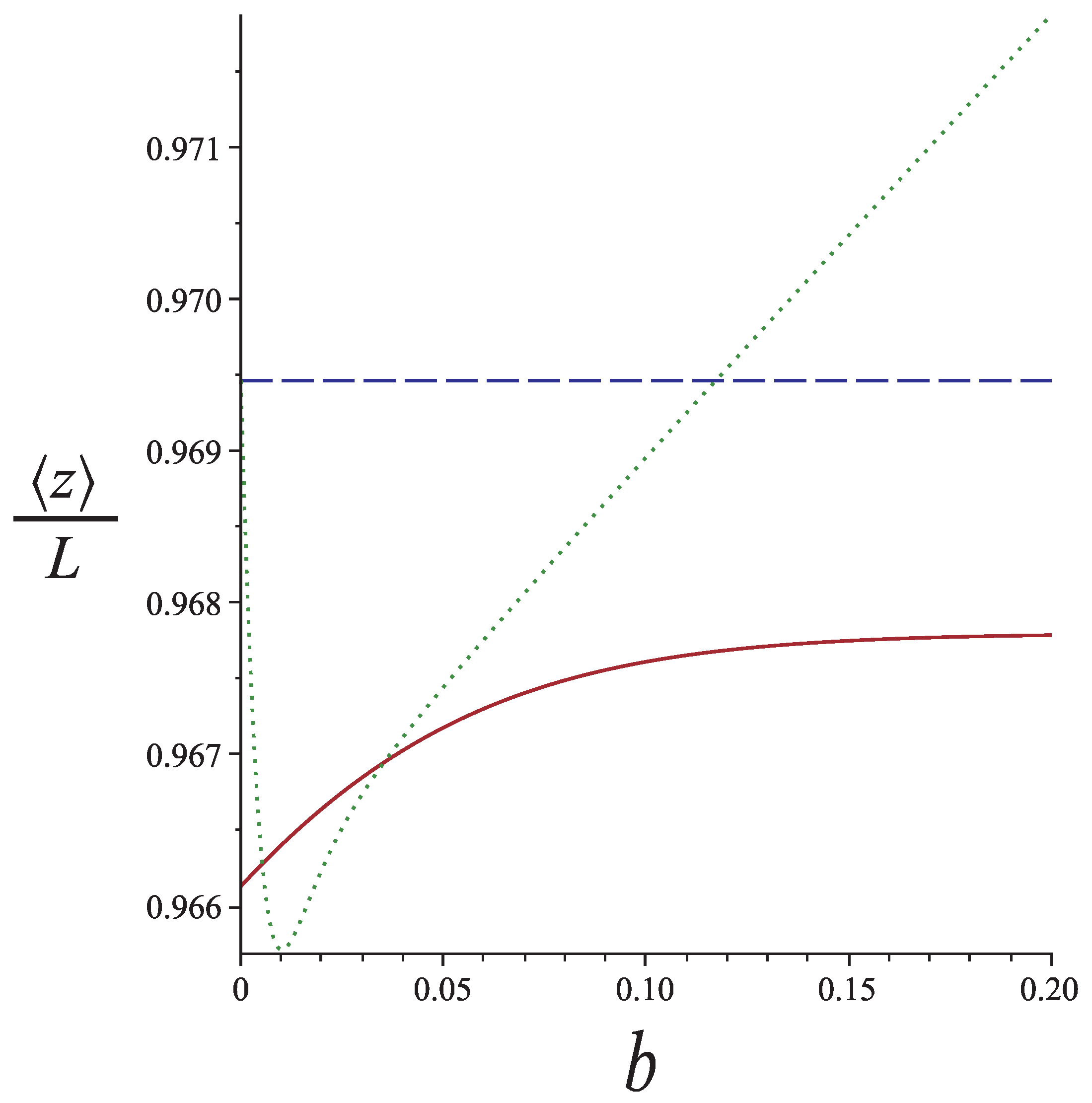
L. The interesting feature of the extension as a function of the hinge position according to Equation (
43) is that it has a minimum below the plateau of Equation (
38) and that the minimum occurs at a value of
b for which Equation (
43) holds. Because the two ends are symmetric, we obtain bimodality in the response of a nunchuck to stretching as a function of the hinge position. Equation (
43) holds for
, whereas Equation (
38) holds for
. Even though we do not have an exact result for the entire range of
b, the bimodality is a robust feature. These features are shown in
Figure 8. The tension and the bending stiffness of the arms correspond to
.
If we have a semiflexible nunchuck under tension in three dimensions, Equation (
38) still holds, and the change in dimensionality only affects
(
in
and
in
). Equation (
43), which gives the force–extension relation of a mixed nunchuck (rigid rod jointed to a semiflexible arm), will have a different first term,
If we carry out the same analysis as we did for the
case, we see that the bimodality in the extension as a function of the hinge position persists, at least for
. As
increases, the bimodality becomes less pronounced and eventually disappears because at the limit
, we recover the rigid-arm nunchuck in
, described by Equation (
7).
6. Conclusions
In this article, we theoretically investigated several aspects of the conformational and elastic behavior of the semiflexible nunchucks. Our results may help the analysis of experimental data. As some of our results have not been tested experimentally, they may motivate future experiments.
At first, we rigorously derive the distribution of bending fluctuations of a WLC in
and discuss the discrepancy with a widely used result, which is based on an imperfect analogy with a quantum rigid rotator. We point out that a similar analogy in
gives a propagator in terms of spherical harmonics [
3], which is also widely used and suffers from the same problems (unjustified periodicity) as its counterpart in
. However, as opposed to the
case, there is no simple resolution to this problem [
25]. Concatenating Gaussian propagators, we obtain the distribution of bending fluctuations of a three-block WLC comprising two long segments of high bending stiffness and a short segment of lower bending stiffness in the middle, which models a semiflexible nunchuck.
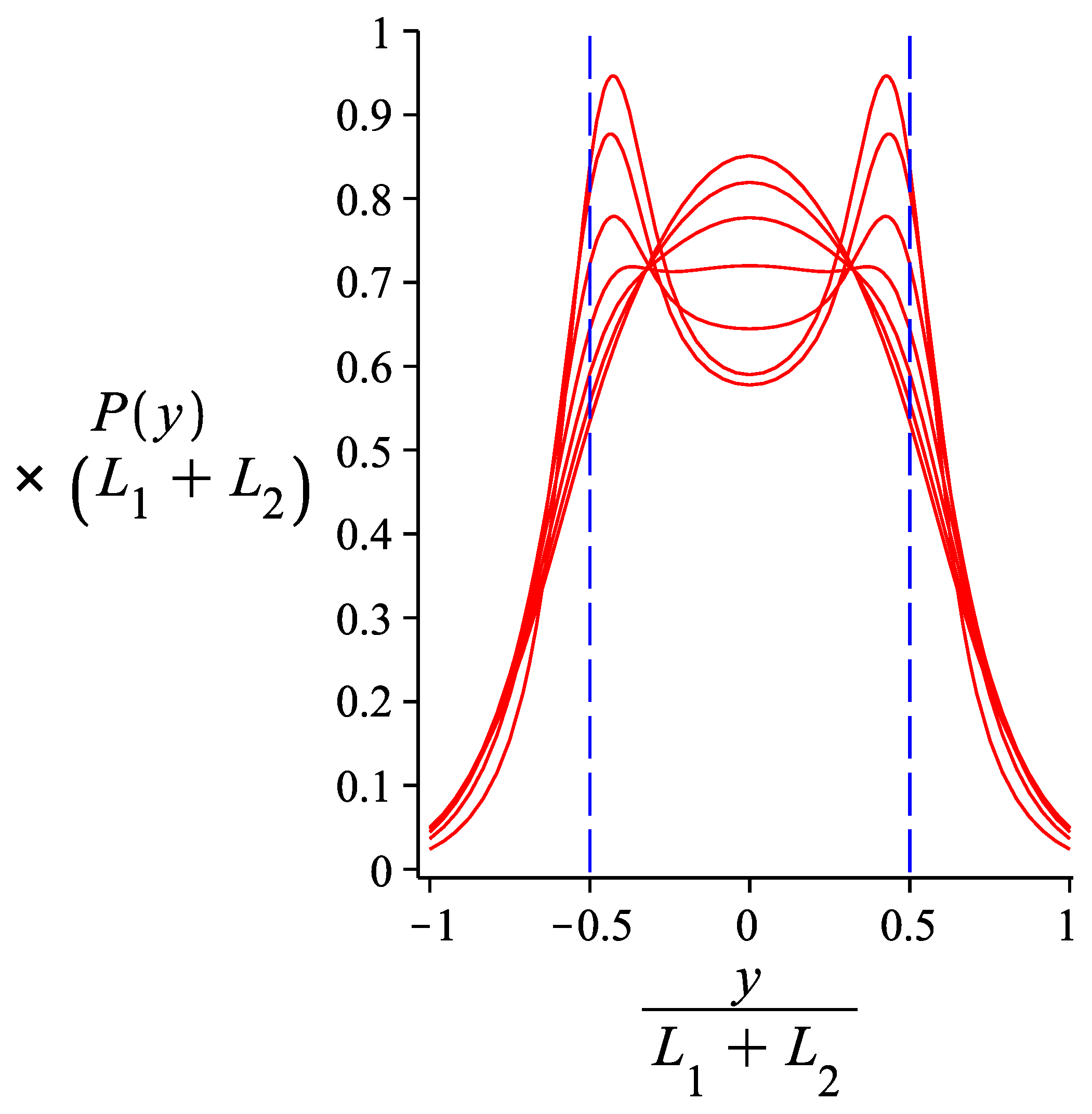
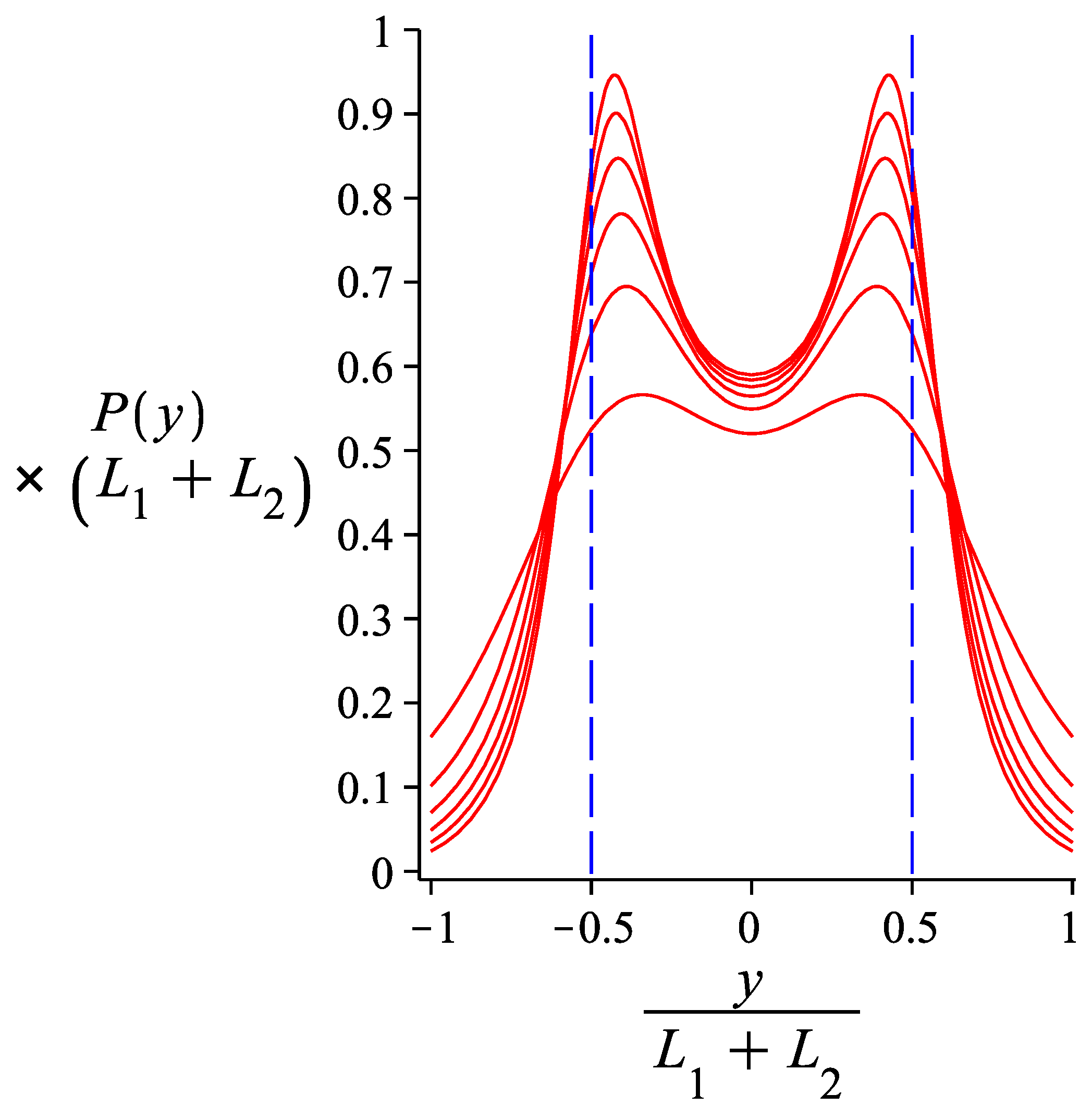
Using the positional-orientational propagator for the weakly bending approximation, which is valid for stiff WLCs, we analytically obtain the positional distribution of the free end of a pair of WLCs jointed by a rigid kink, assuming the other end to be grafted. If we replace the kink by an aligning hinge that acts a harmonic bending spring, we obtain (up to an integral that has to be calculated numerically) the probability of transverse fluctuations of the free end. We show that, depending of the stiffness of the hinge and the bending stiffness of the two arms, this distribution exhibits a pronounced bimodality, which gradually flattens and eventually vanishes as the hinge becomes stiffer. As the hinge can be viewed as a coarse-grained version of a short WLC linking the two arms of the nunchuck, the distinctive qualitative features of the distribution of transverse fluctuations (bimodal, flat, unimodal) could help us get a rough estimate of the stiffness of the hinge.
In most of this work, we ignore the excluded volume interaction. We assume that the two arms of the nunchuck are free to strongly fluctuate past each other. However, we also analyze the case of a nunchuck with rigid rod arms and excluded volume interaction. We show how the bending distribution changes from the Gaussian which is valid in the “phantom” case.
In the case of nunchucks with a soft (fully flexible) hinge, we analyze the response to a stretching force applied at the two ends. We are interested in the dependence of the nunchuck extension in the direction of the force on the hinge position. In the case, if the two arms are rigid rods, we get a single minimum of the extension when the hinge is at the middle. However, for strong tension, we get bimodality. For a hinge close to the ends, we get two minima separated by a plateau. Interestingly, this bimodality (for a rigid-rod nunchuck) does not persist in . For semiflexible nunchucks, at least when the total contour length of the intact WLC (without the hinge) is of the order of the persistence length, we obtain this bimodality under strong stretching, both in two and in three dimensions.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







