
Simulation of the Cyclic Stress–Strain Behavior of the Magnesium Alloy AZ31B-F under Multiaxial Loading



Abstract
:1. Introduction
2. Materials and Methods
2.1. Theoretical Models
2.1.1. Armstrong–Frederick Plasticity Model
2.1.2. Hypo-Strain Phenomenological Model
2.2. Methods
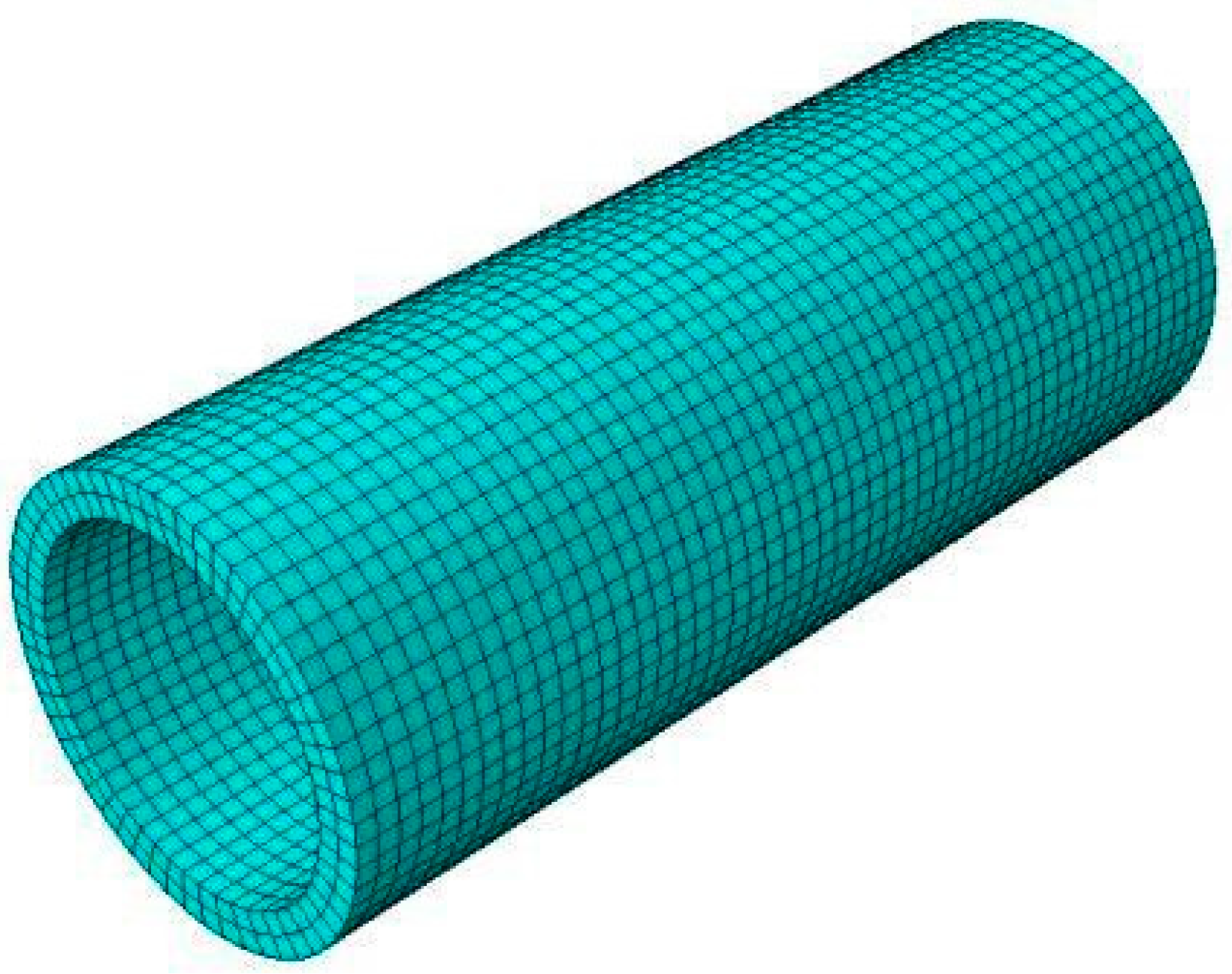
2.2.1. Numerical Simulation Setup
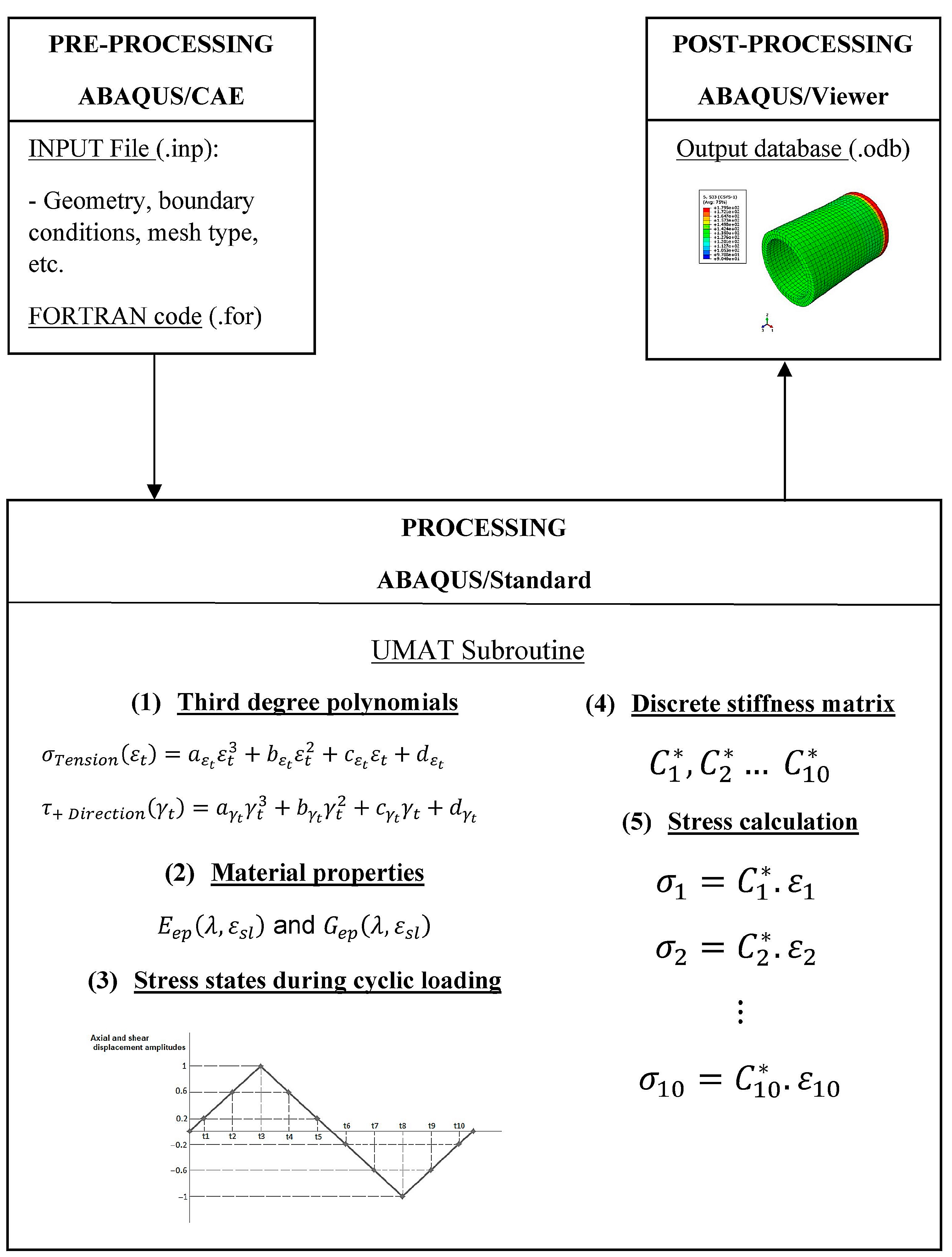
2.2.2. User-Defined Material Model
- Poisson’s ratio was set equal to 0.35 and considered constant for elasticity and plasticity.
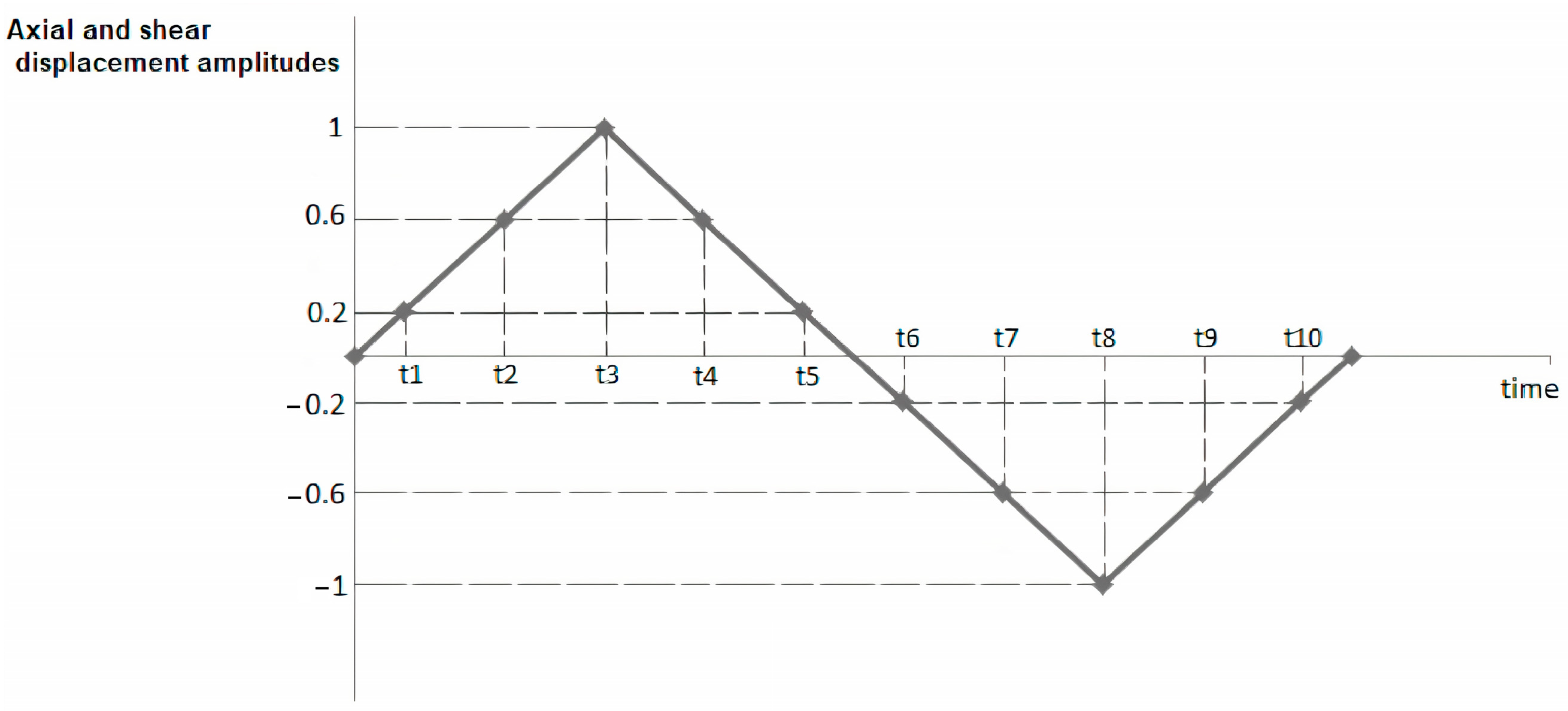
- The parameters Eep(λ, εsl) and Gep(λ, εsl), as well as the discrete stiffness matrix, are valid only in one stress state during cyclic loading;
- Between two successive stress states, the material parameters (Eep and Gep) were assumed to vary linearly.
2.2.3. Implementation Issues in the UMAT Subroutine of Abaqus
3. Results
3.1. Armstrong–Frederick Plasticity Calibration Results
3.2. Pure Axial (Case PT)
3.3. Pure Shear (Case PS)
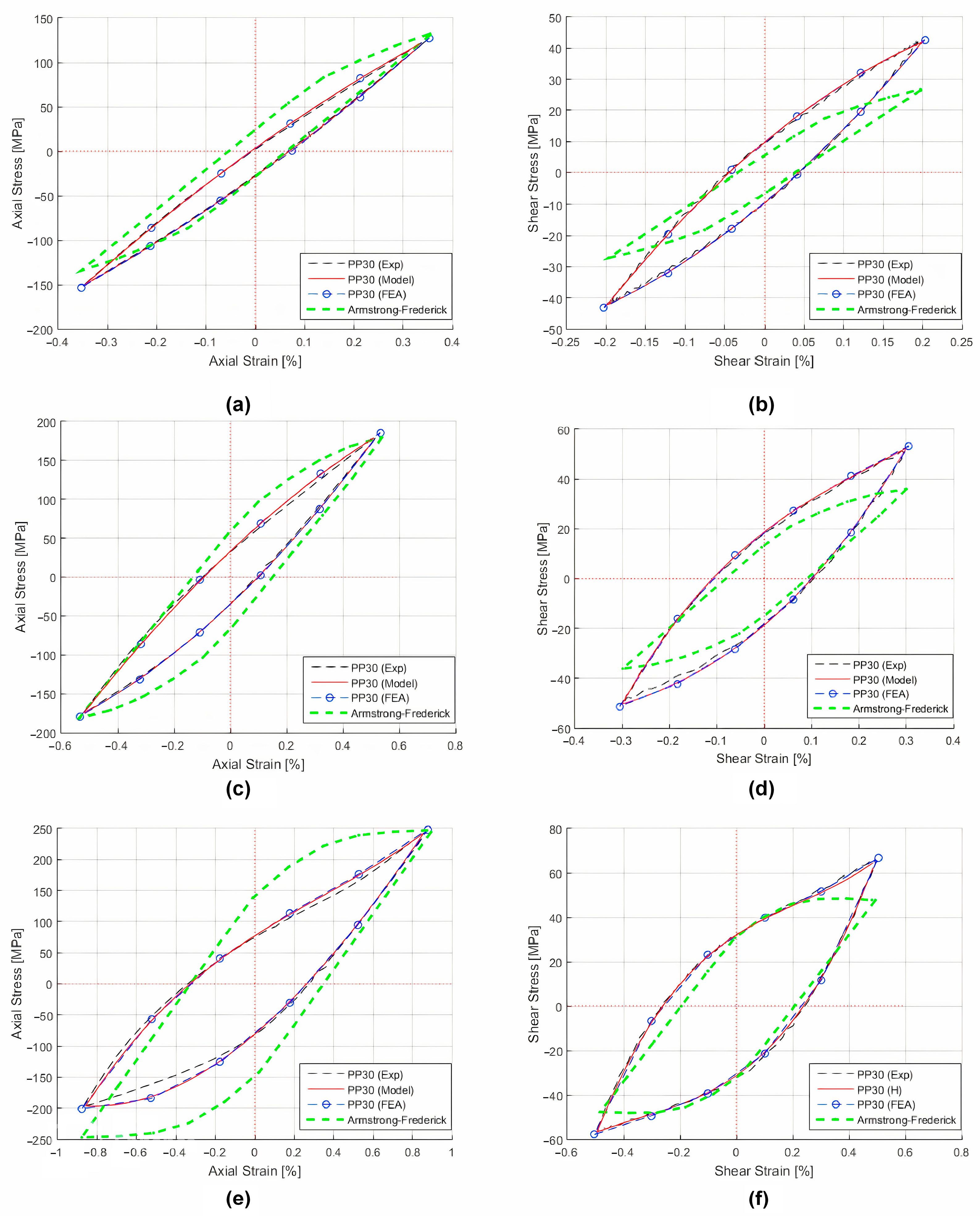
3.4. Proportional Loading with Strain Amplitude Ratio Equal to 30° (Case PP30)
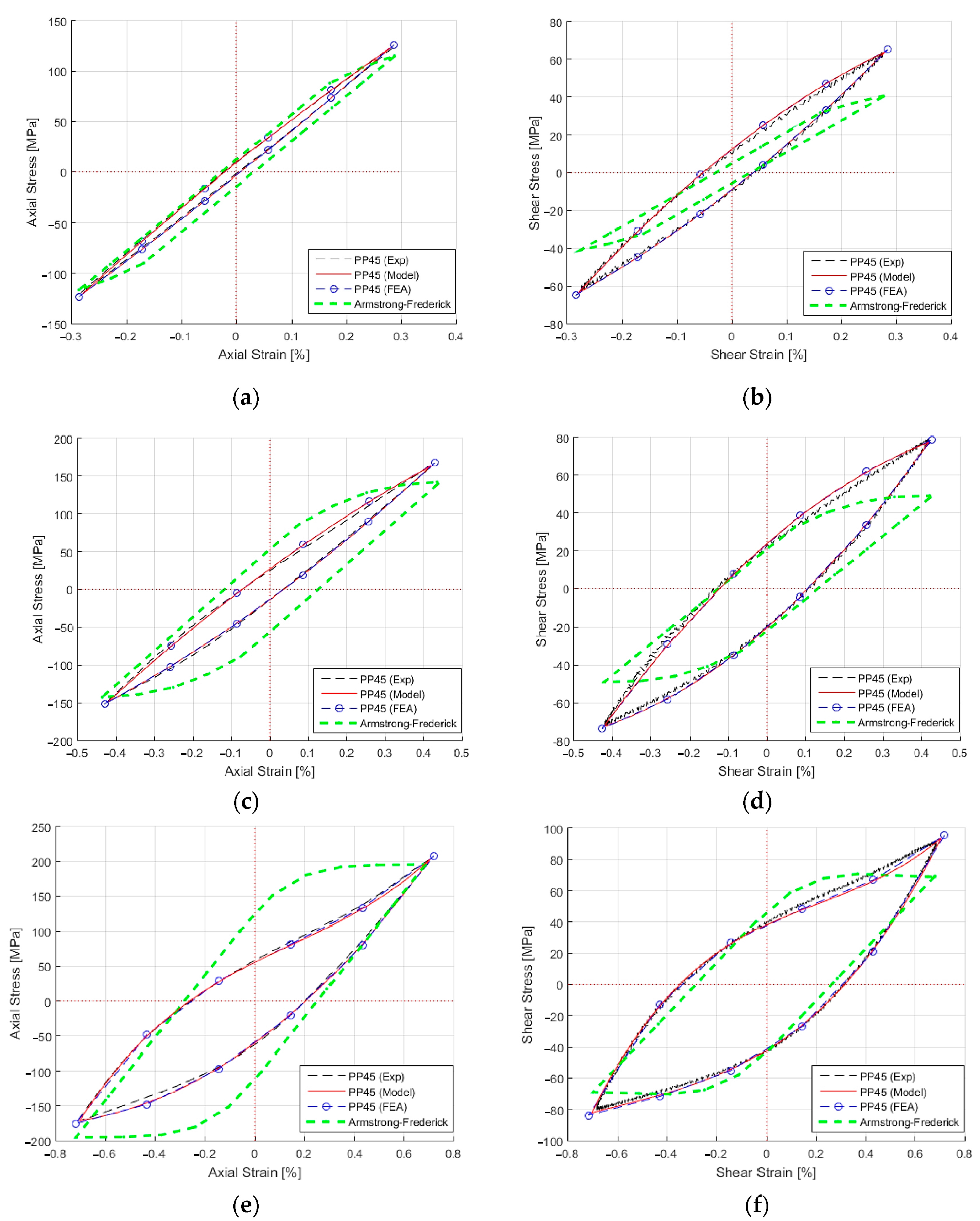
3.5. Proportional Loading with Strain Amplitude Ratio Equal to 45° (Case PP45)
3.6. Proportional Loading with Strain Amplitude Ratio Equal to 60° (Case PP60)
3.7. Nonproportional Loading (Case OP45)
3.8. Stress Distribution Analyses
4. Discussion
5. Conclusions
- The uniaxial and multiaxial experimental results of the cyclic elastic–plastic behavior of AZ31B-F magnesium alloys were correlated with the phenomenological hypo-strain model and the well-known Armstrong–Frederick model.
- The phenomenological approach was successfully implemented in the commercial finite element program Abaqus/Standard using the UMAT subroutine.
- The Armstrong–Frederick model showed poor estimates, especially for high strain amplitudes and for the axial and shear strain components of multiaxial proportional loads.
- The results were explained by the inability of the model to follow the asymmetric behavior of the magnesium alloy. This conclusion was confirmed by the symmetry of the estimates.
- For uniaxial and multiaxial proportional loads, the phenomenological model followed the cyclic stress–strain curves with very good accuracy. However, a slight deviation was observed for strain values of 1%.
- For the non-proportional loading with a strain magnitude of 1.14%, the phenomenological model fails to capture the shear behavior of the AZ31B-F magnesium alloy, although the model estimates the stresses for the maximum total strain amplitudes, the plastic strains, and the back stresses very well. The stress distributions of the finite element analysis simulations of the phenomenological hypo-strain model are consistent.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rowe, J. Advanced Materials in Automotive Engineering; Elsevier: Amsterdam, The Netherlands, 2012. [Google Scholar]
- Hakamada, M.; Furuta, T.; Chino, Y.; Chen, Y.; Kusuda, H.; Mabuchi, M. Life Cycle Inventory Study on Magnesium Alloy Substitution in Vehicles. Energy 2007, 32, 1352–1360. [Google Scholar] [CrossRef]
- Agnew, S.R. Wrought Magnesium: A 21st Century Outlook. Jom 2004, 56, 20–21. [Google Scholar] [CrossRef]
- Friedrich, H.; Schumann, S. Research for a “New Age of Magnesium” in the Automotive Industry. J. Mater. Process. Technol. 2001, 117, 276–281. [Google Scholar] [CrossRef]
- Bettles, C.; Gibson, M. Current Wrought Magnesium Alloys: Strengths and Weaknesses. Jom 2005, 57, 46–49. [Google Scholar] [CrossRef]
- Kulekci, M.K. Magnesium and Its Alloys Applications in Automotive Industry. Int. J. Adv. Manuf. Technol. 2008, 39, 851–865. [Google Scholar] [CrossRef]
- Suh, B.-C.; Shim, M.-S.; Shin, K.S.; Kim, N.J. Current Issues in Magnesium Sheet Alloys: Where Do We Go from Here? Scr. Mater. 2014, 84, 1–6. [Google Scholar] [CrossRef]
- Anes, V.; Lage, Y.E.; Vieira, M.; Maia, N.M.M.; Freitas, M.; Reis, L. Torsional and Axial Damping Properties of the AZ31B-F Magnesium Alloy. Mech. Syst. Signal Process. 2016, 79, 112–122. [Google Scholar] [CrossRef]
- Lv, F.; Yang, F.; Duan, Q.Q.; Yang, Y.S.; Wu, S.D.; Li, S.X.; Zhang, Z.F. Fatigue Properties of Rolled Magnesium Alloy (AZ31) Sheet: Influence of Specimen Orientation. Int. J. Fatigue 2011, 33, 672–682. [Google Scholar] [CrossRef]
- Watanabe, H.; Mukai, T.; Sugioka, M.; Ishikawa, K. Elastic and Damping Properties from Room Temperature to 673 K in an AZ31 Magnesium Alloy. Scr. Mater. 2004, 51, 291–295. [Google Scholar] [CrossRef]
- Chen, X.; Gao, Q.; Sun, X.-F. Low-Cycle Fatigue under Non-Proportional Loading. Fatigue Fract. Eng. Mater. Struct. 1996, 19, 839–854. [Google Scholar] [CrossRef]
- de Freitas, M.; Reis, L.; Li, B. Comparative Study on Biaxial Low-Cycle Fatigue Behaviour of Three Structural Steels. Fatigue Fract. Eng. Mater. Struct. 2006, 29, 992–999. [Google Scholar] [CrossRef]
- Socie, D.; Marquis, G. Multiaxial Fatigue; SAE International: Warrendale, PA, USA, 1999. [Google Scholar]
- Li, B.; Reis, L.; De Freitas, M. Simulation of Cyclic Stress/Strain Evolutions for Multiaxial Fatigue Life Prediction. Int. J. Fatigue 2006, 28, 451–458. [Google Scholar] [CrossRef]
- Bellett, D.; Taylor, D.; Marco, S.; Mazzeo, E.; Guillois, J.; Pircher, T. The Fatigue Behaviour of Three-Dimensional Stress Concentrations. Int. J. Fatigue 2005, 27, 207–221. [Google Scholar] [CrossRef]
- Lou, X.Y.; Li, M.; Boger, R.K.; Agnew, S.R.; Wagoner, R.H. Hardening Evolution of AZ31B Mg Sheet. Int. J. Plast. 2007, 23, 44–86. [Google Scholar] [CrossRef]
- Wu, L.; Jain, A.; Brown, D.W.; Stoica, G.M.; Agnew, S.R.; Clausen, B.; Fielden, D.E.; Liaw, P.K. Twinning–Detwinning Behavior during the Strain-Controlled Low-Cycle Fatigue Testing of a Wrought Magnesium Alloy, ZK60A. Acta Mater. 2008, 56, 688–695. [Google Scholar] [CrossRef]
- Matsuzuki, M.; Horibe, S. Analysis of Fatigue Damage Process in Magnesium Alloy AZ31. Mater. Sci. Eng. A 2009, 504, 169–174. [Google Scholar] [CrossRef]
- Chen, L.; Wang, C.; Wu, W.; Liu, Z.; Stoica, G.M.; Wu, L.; Liaw, P.K. Low-Cycle Fatigue Behavior of an as-Extruded AM50 Magnesium Alloy. Metall. Mater. Trans. 2007, 38, 2235. [Google Scholar] [CrossRef]
- Park, S.H.; Hong, S.-G.; Lee, B.H.; Bang, W.; Lee, C.S. Low-Cycle Fatigue Characteristics of Rolled Mg–3Al–1Zn Alloy. Int. J. Fatigue 2010, 32, 1835–1842. [Google Scholar] [CrossRef]
- Begum, S.; Chen, D.L.; Xu, S.; Luo, A.A. Low Cycle Fatigue Properties of an Extruded AZ31 Magnesium Alloy. Int. J. Fatigue 2009, 31, 726–735. [Google Scholar] [CrossRef]
- Xiong, Y.; Yu, Q.; Jiang, Y. An Experimental Study of Cyclic Plastic Deformation of Extruded ZK60 Magnesium Alloy under Uniaxial Loading at Room Temperature. Int. J. Plast. 2014, 53, 107–124. [Google Scholar] [CrossRef]
- Xiong, Y.; Yu, Q.; Jiang, Y. Cyclic Deformation and Fatigue of Extruded AZ31B Magnesium Alloy under Different Strain Ratios. Mater. Sci. Eng. A 2016, 649, 93–103. [Google Scholar] [CrossRef] [Green Version]
- Hasegawa, S.; Tsuchida, Y.; Yano, H.; Matsui, M. Evaluation of Low Cycle Fatigue Life in AZ31 Magnesium Alloy. Int. J. Fatigue 2007, 29, 1839–1845. [Google Scholar] [CrossRef]
- Park, S.H.; Hong, S.-G.; Bang, W.; Lee, C.S. Effect of Anisotropy on the Low-Cycle Fatigue Behavior of Rolled AZ31 Magnesium Alloy. Mater. Sci. Eng. A 2010, 527, 417–423. [Google Scholar] [CrossRef]
- Albinmousa, J.; Jahed, H.; Lambert, S. Cyclic Axial and Cyclic Torsional Behaviour of Extruded AZ31B Magnesium Alloy. Int. J. Fatigue 2011, 33, 1403–1416. [Google Scholar] [CrossRef]
- Yu, Q.; Zhang, J.; Jiang, Y.; Li, Q. Effect of Strain Ratio on Cyclic Deformation and Fatigue of Extruded AZ61A Magnesium Alloy. Int. J. Fatigue 2012, 44, 225–233. [Google Scholar] [CrossRef]
- Bentachfine, S.; Pluvinage, G.; Toth, L.S.; Azari, Z. Biaxial Low Cycle Fatigue under Non-Proportional Loading of a Magnesium-Lithium Alloy. Eng. Fract. Mech. 1996, 54, 513–522. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, Q.; Jiang, Y.; Li, Q. An Experimental Study of Cyclic Deformation of Extruded AZ61A Magnesium Alloy. Int. J. Plast. 2011, 27, 768–787. [Google Scholar] [CrossRef]
- Xiong, Y.; Yu, Q.; Jiang, Y. Multiaxial Fatigue of Extruded AZ31B Magnesium Alloy. Mater. Sci. Eng. A 2012, 546, 119–128. [Google Scholar] [CrossRef]
- Jahed, H.; Albinmousa, J. Multiaxial Behaviour of Wrought Magnesium Alloys—A Review and Suitability of Energy-Based Fatigue Life Model. Theor. Appl. Fract. Mech. 2014, 73, 97–108. [Google Scholar] [CrossRef]
- Reis, L.G.; Anes, V.; De Freitas, M. AZ31 Magnesium Alloy Multiaxial LCF Behavior: Theory, Simulation and Experiments. AMR 2014, 891–892, 1366–1371. [Google Scholar] [CrossRef]
- Albinmousa, J.; Jahed, H. Multiaxial effects on LCF behaviour and fatigue failure of AZ31B magnesium extrusion. Int. J. Fatigue 2014, 67, 103–116. [Google Scholar] [CrossRef]
- Muhammad, W.; Mohammadi, M.; Kang, J.; Mishra, R.K.; Inal, K. An Elasto-Plastic Constitutive Model for Evolving Asymmetric/Anisotropic Hardening Behavior of AZ31B and ZEK100 Magnesium Alloy Sheets Considering Monotonic and Reverse Loading Paths. Int. J. Plast. 2015, 70, 30–59. [Google Scholar] [CrossRef]
- Lee, M.-G.; Wagoner, R.H.; Lee, J.K.; Chung, K.; Kim, H.Y. Constitutive Modeling for Anisotropic/Asymmetric Hardening Behavior of Magnesium Alloy Sheets. Int. J. Plast. 2008, 24, 545–582. [Google Scholar] [CrossRef]
- Li, M.; Lou, X.Y.; Kim, J.H.; Wagoner, R.H. An Efficient Constitutive Model for Room-Temperature, Low-Rate Plasticity of Annealed Mg AZ31B Sheet. Int. J. Plast. 2010, 26, 820–858. [Google Scholar] [CrossRef]
- Nguyen, N.-T.; Lee, M.-G.; Kim, J.H.; Kim, H.Y. A Practical Constitutive Model for AZ31B Mg Alloy Sheets with Unusual Stress–Strain Response. Finite Elem. Anal. Des. 2013, 76, 39–49. [Google Scholar] [CrossRef]
- Dafalias, Y.F.; Popov, E.P. Plastic Internal Variables Formalism of Cyclic Plasticity. J. Appl. Mech. 1976, 43, 645–651. [Google Scholar] [CrossRef]
- Mróz, Z. On the Description of Anisotropic Workhardening. J. Mech. Phys. Solids 1967, 15, 163–175. [Google Scholar] [CrossRef]
- Jiang, Y.; Sehitoglu, H. Modeling of Cyclic Ratchetting Plasticity, Part I: Development of Constitutive Relations. J. Appl. Mech. 1996, 63, 720–725. [Google Scholar] [CrossRef]
- Jiang, Y.; Sehitoglu, H. Modeling of Cyclic Ratchetting Plasticity, Part II: Comparison of Model Simulations With Experiments. J. Appl. Mech. 1996, 63, 726–733. [Google Scholar] [CrossRef]
- Bouaziz, O.; Kim, H.S.; Lee, J.; Estrin, Y. Bauschinger Effect or Kinematic Hardening: Bridging Microstructure and Continuum Mechanics. Met. Mater. Int. 2023, 29, 280–292. [Google Scholar] [CrossRef]
- Chaboche, J.L. A Review of Some Plasticity and Viscoplasticity Constitutive Theories. Int. J. Plast. 2008, 24, 1642–1693. [Google Scholar] [CrossRef]
- Anes, V.; Reis, L.; Li, B.; Fonte, M.; De Freitas, M. New Approach for Analysis of Complex Multiaxial Loading Paths. Int. J. Fatigue 2014, 62, 21–33. [Google Scholar] [CrossRef]
- Anes, V.; Reis, L.; Freitas, M. Evaluation of a Phenomenological Elastic-plastic Approach for Magnesium Alloys under Multiaxial Loading Conditions. Fatigue Fract. Eng. Mater. Struct. 2019, 42, 2468–2486. [Google Scholar] [CrossRef] [Green Version]
- Anes, V.; Moreira, R.; Freitas, M.; Reis, L. Magnesium Alloy Elastoplastic Behaviour under Multiaxial Loading Conditions. In Proceedings of the 18th International Conference on New Trends in Fatigue and Fracture–NT2F18, Lisbon, Portugal, 17–20 July 2018; pp. 1–4. [Google Scholar]
- Anes, V.; Reis, L.; Freitas, M. Evaluation of the AZ31 Cyclic Elastic-Plastic Behaviour under Multiaxial Loading Conditions. Frat. Integrità Strutt. 2014, 8, 282–292. [Google Scholar] [CrossRef] [Green Version]
- Abaqus User, M. Abaqus Theory Guide; Version 6.14; Dassault Systems Simulia Corp.: Waltham, MA, USA, 2014. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Coefficients | Paxial,1 [MPa] | Paxial,2 [%] | Paxial,3 [MPa] | Paxial,4 [MPa] | Paxial,5 [%] | Paxial,6 [MPa] |
|---|---|---|---|---|---|---|
| ai | 267.7 | −0.313 | 170 | −182.4 | −0.074 | 3.311 |
| bi | −1194 | 2.54 | −1041 | −104.1 | 1.274 | −492.9 |
| ci | 0.029 | −0.002 | −1.613 | 4.79 | −0.005 | 4.498 |
| di | 2923 | −5.096 | 1818 | 91.56 | −3.02 | 1424 |
| ei | 0.135 | −2.57 × 10−4 | 0.132 | −0.043 | −3.32 × 10−5 | −0.023 |
| fi | −11.17 | 0.027 | −5.298 | −6.508 | 0.01 | −10.3 |
| gi | −1606 | 2.97 | −959.7 | −15.73 | 1.341 | −788.4 |
| hi | −0.001 | 3.54 × 10−6 | −0.001 | 3.09 × 10−4 | 7.90 × 10−7 | −5.80 × 10−5 |
| ii | 0.058 | −2.40 × 10−4 | 0.07 | 0.047 | −3.15 × 10−5 | 0.047 |
| ji | 1.952 | −0.007 | −0.262 | 1.817 | 8.92 × 10−4 | 2.8 |
| Coefficients | Pshear,1 [MPa] | Pshear,2 [%] | Pshear,3 [MPa] | Pshear,4 [MPa] | Pshear,5 [%] | Pshear,6 [MPa] |
|---|---|---|---|---|---|---|
| aj | −10.57 | −2.232 | −259.6 | 1334 | −1.633 | 79.78 |
| bj | −223.4 | 11.15 | 1150 | −6194 | 8.208 | −195.7 |
| cj | 3.489 | 0.008 | 2.656 | −10.98 | 0.007 | −2.986 |
| dj | 348.3 | −17.08 | −1847 | 9637 | −12.97 | 352.2 |
| ej | −0.051 | −5.18 10−5 | −0.04 | 0.144 | −6.90 × 10−5 | 0.055 |
| fj | 3.671 | −0.026 | −2.455 | 10.22 | −0.02 | 1.288 |
| gj | −171.3 | 8.434 | 956.5 | −4815 | 6.536 | −191.2 |
| hj | 2.62 × 10−4 | −1.55 × 10−5 | 1.58 × 10−4 | −4.56 × 10−4 | −2.06 × 10−7 | 2.70 × 10−4 |
| ij | −0.016 | 1.59 × 10−4 | 0.031 | −0.113 | 2.29 × 10−4 | −0.015 |
| jj | −1.27 | 0.014 | −1.05 | −0.798 | −0.005 | 0.31 |
| Type of Loading | Strain Level % | Average Error % |
|---|---|---|
| PT-Pure Axial | 1.2 | 4.0 |
| PS-Pure Shear | 0.8 | 4.0 |
| PP30-Axial | 1.0 | 6.0 |
| PP30-Shear | 1.0 | 4.0 |
| PP45-Axial | 1.0 | 5.0 |
| PP45-Shear | 1.0 | 6.0 |
| PP60-Axial | 1.0 | 4.0 |
| PP60-Shear | 1.0 | 4.0 |
| OP45-Axial | 1.14 | 4.0 |
| OP45-Shear | 1.14 | 12.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Anes, V.; Moreira, R.; Reis, L.; Freitas, M. Simulation of the Cyclic Stress–Strain Behavior of the Magnesium Alloy AZ31B-F under Multiaxial Loading. Crystals 2023, 13, 969. https://doi.org/10.3390/cryst13060969
Anes V, Moreira R, Reis L, Freitas M. Simulation of the Cyclic Stress–Strain Behavior of the Magnesium Alloy AZ31B-F under Multiaxial Loading. Crystals. 2023; 13(6):969. https://doi.org/10.3390/cryst13060969
Chicago/Turabian StyleAnes, Vitor, Rogério Moreira, Luís Reis, and Manuel Freitas. 2023. "Simulation of the Cyclic Stress–Strain Behavior of the Magnesium Alloy AZ31B-F under Multiaxial Loading" Crystals 13, no. 6: 969. https://doi.org/10.3390/cryst13060969