1. Introduction
The voting mechanism is a highly important decision-making procedure used in very different kinds of situations, such as political decisions, jury trials, or the election of the Catholic Pope. It is noteworthy that, in this last situation, the agreement is met only when unanimity arises. This requirement reveals some interesting questions about the voters’ behaviour. For instance, in conclaves with misaligned preferences, is it possible to agree on an alternative? If this is the case, which alternative will be implemented? Which voter will have to give up first? When will this occur?
The study of these questions, which originated from the model of [
1], involves a vast number of different contexts, such as the bargaining in legislatures [
2], multilateral bargaining models [
3], and situations with asymmetric information [
4,
5]) and incomplete information [
6,
7,
8]. Recently, References [
9,
10] studied how agents reach an agreement through a sequential random ordering voting procedure with, potentially, an infinite number of stages. The result of this negotiation process shows that the most patient agent’s preferred alternative is chosen in the first round.
The closest model to the one presented here is a model by [
9]. He considered a decision-making conclave choosing between two alternatives under a supermajority rule (including unanimity). If a decision is not reached in the first round of voting, then the procedure repeats in the next round, and so on, until the required supermajority is reached. The delay in time is increasingly costly to each player. The question that is asked is: Which rule offers higher utilitarian welfare? In answering this question, he found that there is a subgame perfect Nash equilibrium that leads to a unique voting outcome in the first round. This outcome coincides with the alternative preferred by the pivotal voter with the greater indifference time (or, in other words, impatience degree).
The current approach studies how agents make a unanimous decision over a set of alternatives, assuming potentially an infinite number of voting stages, such that the delay of the decision implies some costs for the voters. Unlike to [
9], it is assumed that the ordering of the voters is fixed and the agreement is met by unanimity. Each voter has an impatience degree indicating when it is worth voting for the non-preferred alternative rather than for the preferred alternative. We do not restrict our attention to the cases when voters must be different in their patience, as was done by [
9]. Since both voters know the impatience degree of themselves and the other voter, intuition suggests that the more patient voter will manage to obtain his preferred alternative. We show that the subgame perfect equilibrium is unique: the first voter obtains his/her preferred alternative in the first stage, independently of his/her impatience degree. The result contradicts the one obtained by [
9].
The remainder of the paper is organised as follows. The next section introduces the model.
Section 3 and
Section 4 provide the main results of the model and its discussion. Finally,
Section 5 closes the paper.
2. The Model
2.1. Decision Problem
We considered a sequential voting procedure with complete information. Let denote the set of individuals with typical elements i and j, where . A decision is made via a sequential unanimity voting procedure in which the agents have to choose between two alternatives . Each (proposal) stage consists of a proposal of an alternative c by an agent and a counterproposal by her/his opponent. If both alternatives coincide, the agents are interpreted to have agreed on outcome, and the process terminates. The situation in which no agreement is reached is denoted by . Finally, each agent i’s preferences over the set of possible outcomes is represented by the utility function, which is assumed to satisfy the four axioms we detail next.
First, we assumed that each agent has a persistently most-preferred alternative. That is, for each agent i, there exists an alternative such that, for every stage t, if agreed at t, yields i a higher utility than . We focused on the case in which preferences are misaligned, , and assumed without loss of generality that agent a’s and b’s favourite alternatives are and , respectively, i.e., that and .
Axiom 1. Persistence (PER). For each agent i, there exists some alternative such that for at every stage t. Furthermore, .
Second, we assumed that agents are impatient, that is that the utility they obtain from agreement decreases with time. This assumption is typically related to money costs: plane or train tickets become more expensive with time; savings deposited in a current account at the bank are affected by inflation, etc.
Axiom 2. Impatience (IMP). For each agent i, each alternative c, and each stage t, .
Third, we assumed that agents prefer any agreement to perpetual disagreement.
Axiom 3. Termination (TER). For each agent i and each outcome , .
Finally, we assumed that each agent i faces a subjective deadline . Beyond this deadline, the utility obtained from agreeing on the least-preferred alternative now is greater than the utility obtained from keeping on voting and eventually agreeing on the most-preferred one.
Axiom 4. Reversion (REV). For each agent i, there exists a reversal stage such that if , and otherwise.
2.2. Order Schemes
The sequence of proposals and counterproposals is observable for the agents, and thus, it is information their behaviour can be conditioned by. We refer to these sequences as histories, and they can be formalised as: the initial history , in which no proposal has been made yet, finite sequences , where either or , and infinite sequences . Since the procedure is over once the agreement is reached, we require that, for finite histories of length n, it holds that at every stage , and that for infinite sequences, it holds that at every stage t. Histories are naturally divided into two categories:
Partial histories: histories in which either no proposal has been made or agreement has not been reached after finitely many proposals. These are formalised by the initial history and finite histories , where either or and , respectively. Let H denote the set of partial histories.
Terminal histories: histories in which either agreement is reached or disagreement is persistent. These are formalised by finite histories , where and , and infinite histories, respectively. Let Z denote the set of terminal histories. Notice that each terminal history z induces a unique outcome . This is obtained as follows: if z is finite, then with and ; clearly, ; if z is infinite, then
As mentioned above, our analysis focused on the sensitivity of strategic behaviour to the particular way in which the agent who makes the first proposal is designated at each stage. To this end, we distinguish the following two schedules:
Fixed order scheme: The designated proposer is the same at every stage; that is, at every stage
t, agent
a makes a proposal and agent
b decides whether to accept it or continue with the voting. This scheme is formalised by assuming that agent
a’s and
b’s information sets are, respectively:
Switching order scheme: The designated proposer changes at every stage; that is, agent
a (respectively,
b) makes a proposal at each odd (respectively, even) stage
t, and agent
b (respectively,
a) decides whether to accept agent
a’s (respectively,
b’s) proposal or to continue with the voting. In this case, we assumed that agent
a’s and
b’s information sets are, respectively:
Given schedule
, each agent
i’s decision consists of what to propose at each of her/his information sets; thus, the set of agent
i’s
strategies is given by:
To understand better how the voting procedure is performed, consider Example 1.
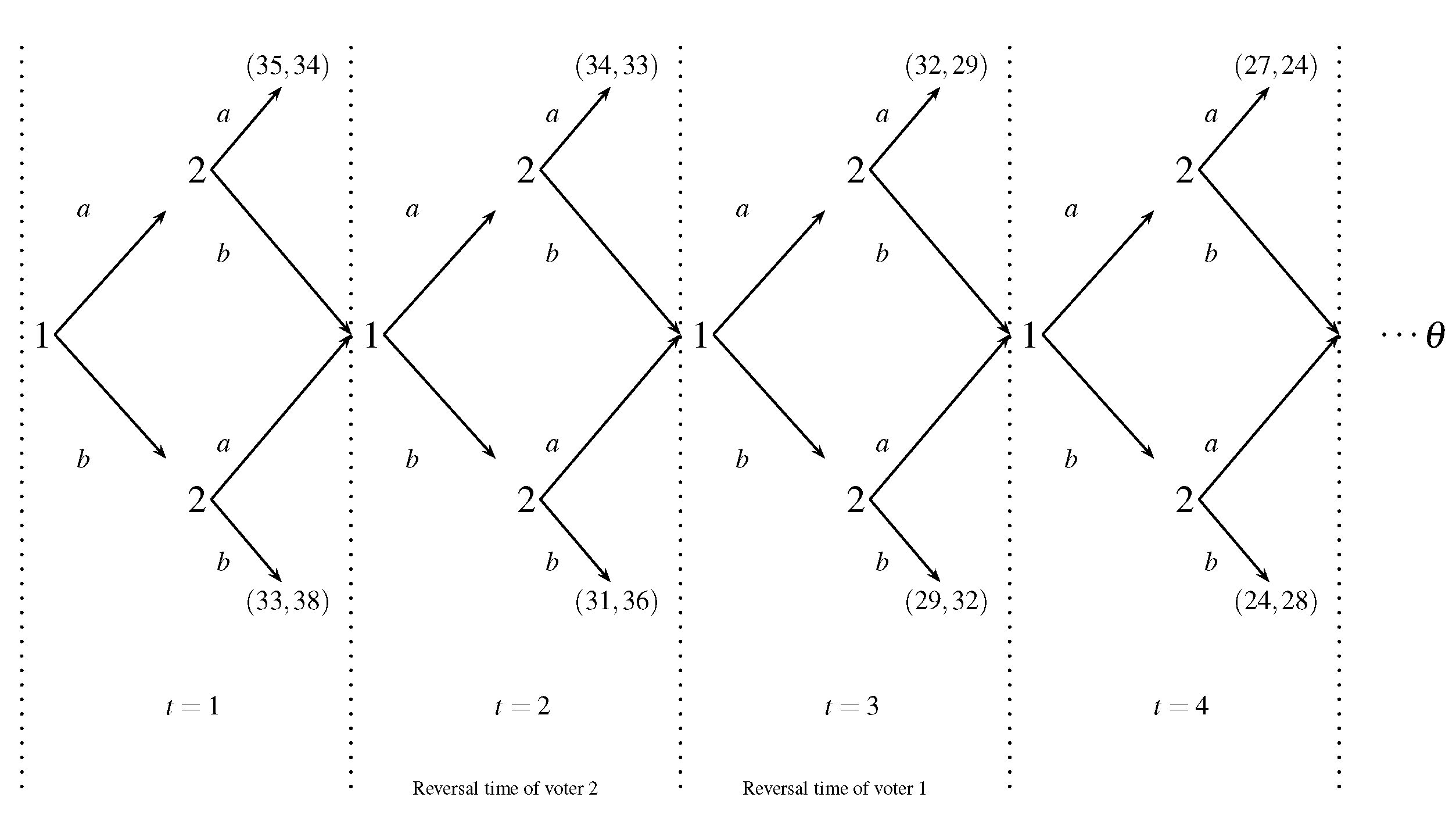
Example 1. There are two voters voting sequentially for two alternatives . At each stage, Voter 1 votes first either for a or for b, then Voter 2 votes either for a or for b. Voter 1 prefers a, and Voter 2 prefers b: and . The utilities are defined according to the four axioms: PER, IMP, REV, and TER. Figure 1 illustrates the first five stages and the utilities of the possible outcome at these stages (we assumed that, starting from the sixth stage, the utility functions for both voters fulfil the four axioms). For instance, assume that the procedure arrives at the second stage, : Individual 1 votes for b, and Individual 2 votes for b as well. Then, the voting stops, and the alternative b is implemented, so that Individuals 1 and 2 obtain 31 and 36, accordingly. If Individual 2 votes for a, then the voting passes to the next stage, , and Individual 1 is asked to vote again. If the voters never vote for the same alternative, then the outcome is considered to be ∅ implemented at stage ∞.
It is easy to see that the reversal time of Voter 1 equals three: . The reversal time of Voter 2 equals to two: .
Clearly, each strategy profile
induces a unique
conditional terminal history
at each partial history
h, namely the sequence of proposals that would follow in case partial history
h has been reached.
1 This allows for defining the usual notion of the subgame perfect equilibrium [
1]:
Definition 1 (Subgame perfect equilibrium).
For each schedule , we say that strategy profile is a subgame perfect equilibrium (SPE) for schedule k if, for any agent i, we have that: 3. The Strategic Impact of Order Schemes
In this section, we study the outcome of the voting process described above in its two variants: the fixed order scheme and the switching order one. As we shall see, the opposing nature of the results corresponding to each schedule (Propositions 1 and 2 below, respectively) sheds light on the relation between patience and the first-mover advantage.
In principle, it seems natural to expect that the possible asymmetries in the degree of patience offer a strategic advantage to the most patient agent: she/he could try to delay the agreement until the the stage at which the least patient agent prefers to agree on any alternative rather than keep negotiating. Our first result shows that this intuition can be misleading: patience plays no role at all in the outcome under the fixed order scheme.
Proposition 1. Under any subgame perfect equilibrium for the fixed order scheme, agent a’s most-preferred alternative is agreed in the first stage, i.e., .
Proof. Set ; pick arbitrary SPE ; proceed by backward induction:
Initial step: At every history h of length , agent a proposes his/her most-preferred alternative and agent b accepts it, i.e., and . Fix and arbitrary history h of length t. Then, since , we know by REV and TER that, at h, agent b accepts whatever agent a proposes, that is for any alternative c. Thus, because of PER, agent a’s unique best response at h is to propose , i.e., .
Inductive step: At every history h of length , agent a proposes his/her most-preferred alternative and agent b accepts it, i.e., and . The case of histories of length was already covered above, so we can proceed inductively. Suppose that the claim is true for ; let us verify that it also holds for . Fix arbitrary history h of length . We know by the induction hypothesis that, for any history of length , and . Hence, it follows from IMP and TER that at h, agent b accepts whatever agent a proposes, that is for any proposal c. Thus, because of PER, agent a’s unique best response at h is to offer , i.e., . □
The fragility of the strategic advantage associated with patience illustrated by Proposition 1 highlights the deep relation and complex interplay between patience and another familiar concept in game theory: the first-mover advantage. As the proposition shows, when an agent is permanently established as the proposer, or first-mover, this feature arises as a de facto advantage to the extent of being the only determinant of the outcome and, notably, rendering patience irrelevant. Interestingly, the preponderance of patience is restored under the switching order scheme:
Proposition 2. Under any subgame perfect equilibrium for the switching order scheme, the most patient agent’s most-preferred alternative is agreed in the first stage, i.e., , where .
Proof. Set , and let denote the most patient agent’s most-preferred alternative. Fix an arbitrary SPE . We proceed now inductively.
Initial step: We have that: if is odd, then at each history of length , agent b offers and agent a accepts it; if is even, then at each history of length , agent a offers and agent b accepts it. The proofs of both claims are, mutatis mutandis, identical, so we focus on Claim . Pick arbitrary history h of length . Since is even, we know that . We considered then two different cases. First, if , then, necessarily, . Clearly, it follows from REV and TER that agent a is going to accept whatever is offered to him/her at histories of length , i.e., that for any alternative c. Thus, because of PER, is the optimal proposal for agent b. Second, if , it follows from REV and TER that for any alternative c and any history of length . As a consequence, because of PER, . Since agent a can guarantee obtaining at , then, obviously, . Thus, it follows from IMP, REV, and TER that and, from PER, that .
Inductive step: For each history of length , the most patient agent’s most-preferred alternative is offered and accepted, i.e., for any agent i and any history of length , and . The case of histories of length has already been proven, so we can proceed inductively. Suppose that the claim holds for ; let us check that it does so for . Pick arbitrary history h of length , and let i denote the agent satisfying . We know from the induction hypothesis that and for any history of length at least equal to t. Then: if , it follows from IMP and TER that and, therefore, from PER, that ; if , then , and thus, it follows from PER that, first, for any alternative and, thus, from IMP and TER, that . Hence, in any case, and . Applying for the case of proves the claim. □
Hence, in this case, patience is the sole determinant of the strategic interaction, and, in particular, any trace of the first-mover advantage is absent. The sharp contrast between the fixed order and switching order schemes is evident then: while the former maintains the first-mover advantage to the extent that patience becomes negligible for the analysis, the alternation of the proposer role in the switching role scheme abolishes the first-mover advantage and allows patience to arise as the main driving force behind agents’ choice.
4. Discussion
The current paper analysed conclaves with commonly known misaligned preferences over two alternatives. Specifically, our model of iterative voting introduces a time effect through the cost of the delay of the decision. Contrary to most of the literature, we did not consider a common deadline, i.e., a moment in time when negotiation stops even if the agents have not come to any consensus (see, for instance, [
11,
12,
13]). Instead, we introduce the following novel feature: each agent has his/her own deadline—a moment in time when it is worth voting for the non-preferred alternative, rather than for the preferred alternative. The current model depicts the context where individuals must agree on selecting an option out of the set of alternatives by voting in a sequential way. Individuals are arranged in a fixed linear order, and at each stage, they cast their votes in that order. We considered the most strictest voting rule, unanimity: if all the voters unanimously support the same alternative, then the voting stops with this alternative chosen; otherwise, the procedure is repeated at the next stage.
Note that voters have strict preferences over alternatives, which are persistent with stages: at each stage, the voter prefers the same alternative to the others. For each voter, a utility function is defined. Both utility functions and preferences are known by all the voters; in other words, perfect information was assumed.
Since voting with stages usually causes delays and a loss of time, it was assumed that the utilities decrease with the stages. The decrease of the utilities and the persistence of preferences cause the existence of an impatience degree for each voter: a moment in time (a stage) when it is worth voting for the non-preferred alternative now rather than waiting for the next stage and voting for the preferred alternative.
As previously mentioned, intuition suggests that the more patient voter will manage to obtain his/her preferred alternative. It is shown that in the unique solution of the sequential voting procedure obtained by backward induction, the first voter obtains his/her preferred alternative in the first stage. In this context, we analysed how two different voting schedules may affect the final outcome. In doing so, we studied a fixed voting schedule, where the voters’ ordering is fixed. A switching voting schedule is where the voting order alternates at each stage. Obviously, the agreement is met by unanimity. Our key finding shows a counterintuitive result: the most patient voter will not always obtain his/her preferred alternative. Specifically, the chosen alternative will depend on both the voting schedule and the degree of patience. Indeed, if the voting order is fixed, i.e., the first voter is always the same agent at each round, the subgame perfect equilibrium is unique and the first voter obtains his/her preferred alternative in the first stage, regardless of his/her degree of impatience. On the contrary, if the voting order alternates at each stage, i.e., the agent who votes first varies from one round to the next one, the subgame perfect equilibrium is unique, and the most patient voter obtains his/her most-preferred alternative in the first stage, even if in this stage, he/she is the second to vote, the usual first-movement advantage disappearing.
It is easy to provide real-life examples of the fact that the first voter who takes the initiative wins. Consider a situation with two players: a firm and a labour union in the case of a strike. If the strike is already happening, then the union has set up some claims on the enterprise. Although it seems that the enterprise is more patient, with more resources at its disposal, in the case of a strike, it is likely that the enterprise agrees with the claims of the union. Otherwise, the enterprise can prevent the strike by moving first and proposing an offer to the workers, which is less generous than the offer in the case when the strike has already happened (see, for instance, [
14]).
Note that if the order of the voters is not exogenous and is defined by the voters themselves, then it is likely that the most extreme voter would take the initiative and vote first. Therefore, in this case, the result coincides, to some degree, with the results of [
15,
16]. In other words, being more patient does not guarantee the victory of one’s preferred alternative. Therefore, what really matters is the order of the voters.
The obtained result of the uniqueness of the subgame perfect equilibrium is similar to the result of [
1], where the proposal of the first individual is accepted by the other individual. Besides, there is a huge literature on voting by conformity that shows that people are likely to accept the proposal immediately. For instance, Reference [
17] states that the voters are willing to conform because they recognise that even small departures from the social norm will seriously impair their status. Despite this penalty, the voters with a higher degree of patience (agents with sufficiently extreme preferences) are not likely to confirm with the first voter. It is noteworthy that [
18] and [
19] (among others) suggested that voters follow a leader and attract other voters to follow them as well. Reference [
20] also studied the effect of the presence of leaders between the voters on the information transmission among themselves. In the model studied here, leadership can be presented as taking the initiative and voting first.
5. Conclusions
We analysed a two-agent sequential unanimity voting procedure, where at each stage, the order of voting can be either fixed or switching and in which both agents have a subjective deadline (understood as patience), after which ending the procedure gains priority over the alternative agreed.
In this setting, we showed that the specification of the order is crucial for the outcome of the procedure due to the way it affects the interplay between patience and the first-mover advantage: while in the fixed order procedure, the first voter’s most-preferred alternative is agreed in the first stage, in the switching order scheme, the most patient agent’s most-preferred alternative is the agreed one in the first stage. Hence, patience plays no role in the fixed order scheme, and there is no first order advantage in the switching order one. In particular, the results highlight the subtleties involved in economic modelling and the lack of robustness of predictions in light of misspecifications of the interaction context.
An interesting ongoing issue is to modify existing elements of the model, for instance to explicitly introduce a final stage. Second is to modify the procedure. The most natural extension is not to fix the order of the voters and make it random at each stage (as a continuation and generalisation of the considered case where the voting order is reversed only once). The other extension would be to allow coalitions or to introduce other voting rules. The presence of bribing seems to be challenging and promising. Bribing can be presented in different ways: utility transfer between the voters, direct payments, or increasing the probability to vote first. Maybe, in this case, the veto power of the individuals is reduced and the degree of impatience matters.



{kind=link}
