


Predicting the RUL of Li-Ion Batteries in UAVs Using Machine Learning Techniques



Abstract
:1. Introduction
1.1. Methods Used for RUL Prediction of Li-Ion Batteries
1.2. Literature Review
1.3. Contribution and Structure of the Work
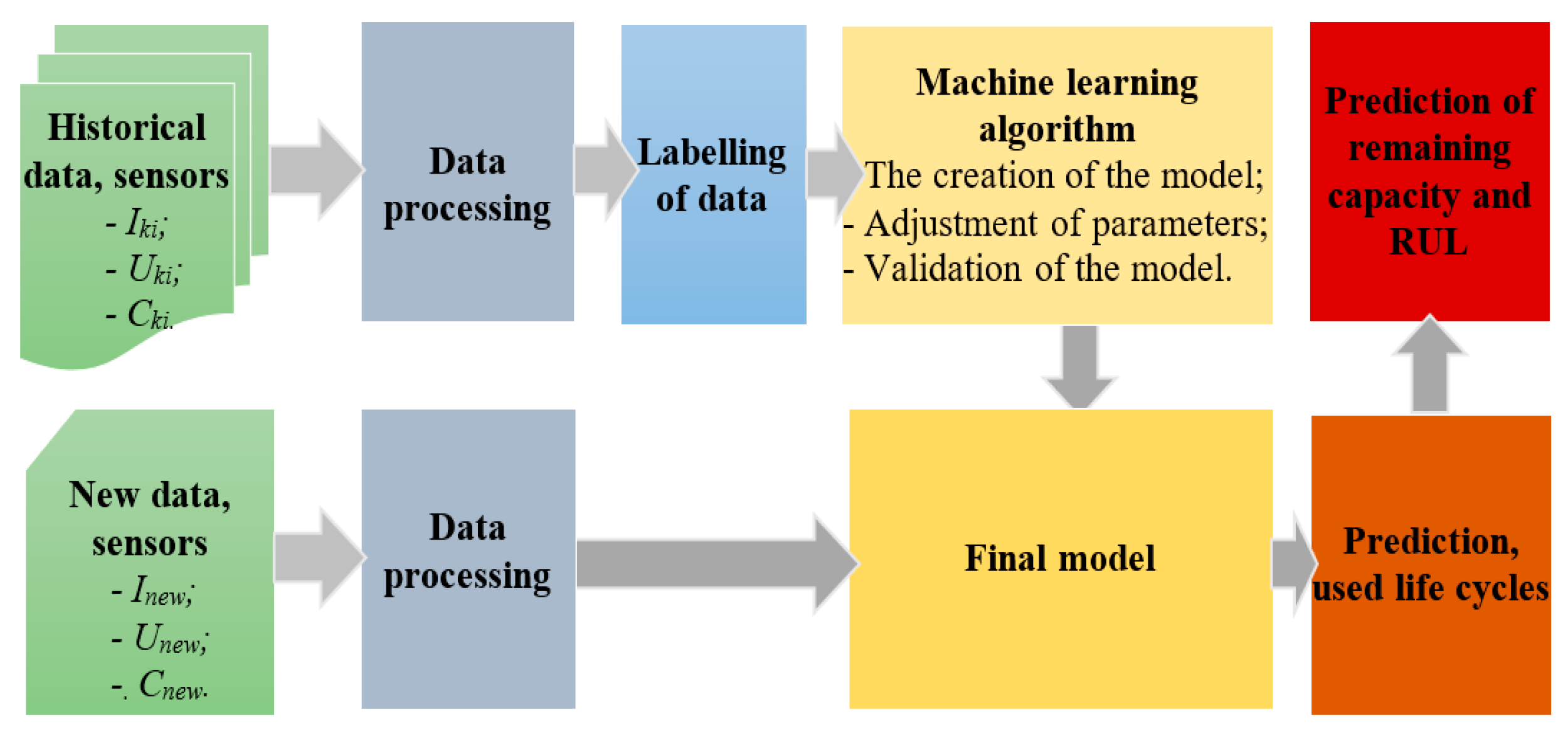
2. RUL Prediction Methodology Using Machine Learning
2.1. The Li-Ion Battery RUL Prediction Using SVMR
2.2. The Li-ion Battery RUL Prediction Using MLR
2.3. The Li-Ion Battery RUL Prediction Using RF
2.4. Performance Evaluation of Regression Algorithms
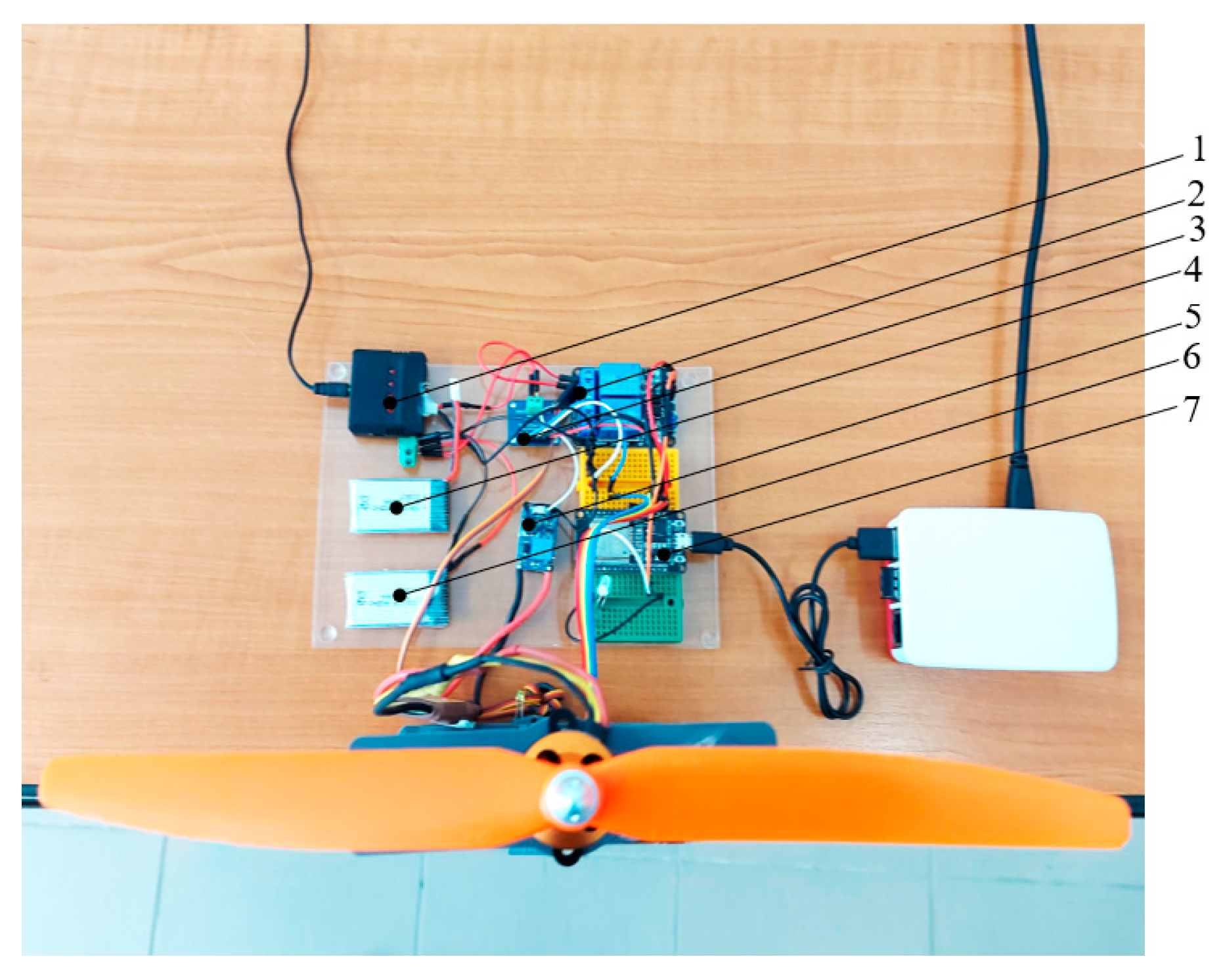
3. Experimental Stand
4. Experimental Setup
5. Results
6. Conclusions
7. Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Xu, T.; Peng, Z.; Wu, L. A novel data-driven method for predicting the circulating capacity of lithium-ion battery under random variable current. Energy 2021, 218, 119530. [Google Scholar] [CrossRef]
- Wei, J.; Chen, C. A multi-timescale framework for state monitoring and lifetime prognosis of lithium-ion batteries. Energy 2021, 229, 120684. [Google Scholar] [CrossRef]
- Sun, Z.; Wang, N.; Lin, H.; Zhou, X. Persistent coverage of UAVs based on deep reinforcement learning with wonderful life utility. Neurocomputing 2023, 521, 137–145. [Google Scholar] [CrossRef]
- Cheng, Z.; Liwang, M.; Chen, N.; Huang, L.; Du, X.; Guizani, M. Deep reinforcement learning-based joint task and energy offloading in UAV-aided 6G intelligent edge networks. Comput. Commun. 2022, 192, 234–244. [Google Scholar] [CrossRef]
- Xue, J.; Zhang, H.; Hu, Q. A low-cost communication security scheme of UAV based on multi-round reverse auction model. Pervasive Mob. Comput. 2022, 85, 101652. [Google Scholar] [CrossRef]
- Astaneh, M.; Dufo-López, R.; Roshandel, R.; Bernal-Agustin, J.L. A novel lifetime prediction method for lithium-ion batteries in the case of stand-alone renewable energy systems. Int. J. Electr. Power Energy Syst. 2018, 103, 115–126. [Google Scholar] [CrossRef]
- Lam, D.H.C.; Lim, Y.S.; Wong, J.; Allahham, A.; Patsios, C. A novel characteristic-based degradation model of Li-ion batteries for maximum financial benefits of energy storage system during peak demand reductions. Appl. Energy 2023, 343, 121206. [Google Scholar] [CrossRef]
- Hosen, M.S.; Jaguemont, J.; Van Mierlo, J.; Berecibar, M. Battery lifetime prediction and performance assessment of different modeling approaches. iScience 2021, 24, 102060. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Liu, K.; Foley, A.M.; Zülke, A.; Berecibar, M.; Nanini-Maury, E.; Van Mierlo, J.; Hoster, H.E. Data-driven health estimation and lifetime prediction of lithium-ion batteries: A review. Renew. Sustain. Energy Rev. 2019, 113, 109254. [Google Scholar] [CrossRef]
- Fei, Z.; Yang, F.; Tsui, K.-L.; Li, L.; Zhang, Z. Early prediction of battery lifetime via a machine learning based framework. Energy 2021, 225, 120205. [Google Scholar] [CrossRef]
- Meng, Y.; Li, J.; Gu, S.; Fu, Y.; Wang, Z.; Liu, J.; Gong, X. Li-ion complex enhances interfacial lowest unoccupied molecular orbital for stable solid electrolyte interface of natural graphite anode. Electrochim. Acta 2023, 449, 142262. [Google Scholar] [CrossRef]
- Li, H.; Liu, W.; Yang, X.; Xiao, J.; Li, Y.; Sun, L.; Ren, X.; Zhang, P.; Mi, H. Fluoroethylene carbonate-Li-ion enabling composite solid-state electrolyte and lithium metal interface self-healing for dendrite-free lithium deposition. Chem. Eng. J. 2021, 408, 127254. [Google Scholar] [CrossRef]
- Wlodarczak, P. Machine Learning and Its Applications; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Cheng, Y.; Lu, C.; Li, T.; Tao, L. Residual lifetime prediction for lithium-ion battery based on functional principal component analysis and Bayesian approach. Energy 2015, 90, 1983–1993. [Google Scholar] [CrossRef]
- Narayanan, S.S.S.; Thangavel, S. A novel static model prediction method based on machine learning for Li-ion batteries operated at different temperatures. J. Energy Storage 2023, 61, 106789. [Google Scholar] [CrossRef]
- Jung, S.J.; Hur, J.W. Deep Learning Approaches to RUL Prediction of Lithium-ion Batteries. Korean Soc. Manuf. Process Eng. 2020, 19, 21–27. [Google Scholar] [CrossRef]
- Zraibi, B.; Mansouri, M.; Okar, C. Comparing Single and Hybrid methods of Deep Learning for Remaining Useful Life Prediction of Lithium-ion Batteries. E3S Web Conf. 2021, 297, 01043. [Google Scholar] [CrossRef]
- Ben Ali, J.; Azizi, C.; Saidi, L.; Bechhoefer, E.; Benbouzid, M. Reliable State of Health Condition Monitoring of Li-ion Batteries based on Incremental Support Vector Regression with Parameters Optimization. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2023, 237, 717–727. [Google Scholar] [CrossRef]
- Wu, J.; Kong, L.; Cheng, Z.; Yang, Y.; Zuo, H. RUL Prediction for Lithium Batteries Using a Novel Ensemble Learning Method. Energy Rep. 2022, 8, 313–326. [Google Scholar] [CrossRef]
- Chen, D.; Zheng, X.; Chen, C.; Zhao, W. Remaining useful life prediction of the lithium-ion battery based on CNN-LSTM fusion model and grey relational analysis. Electron. Res. Arch. 2023, 31, 633–655. [Google Scholar] [CrossRef]
- Yang, Y. A machine-learning prediction method of lithium-ion battery life based on charge process for different applications. Appl. Energy 2021, 292, 116897. [Google Scholar] [CrossRef]
- Zhu, Z.; Yang, Q.; Liu, X.; Gao, D. Attention-based CNN-BiLSTM for SOH and RUL estimation of lithium-ion batteries. J. Algorithms Comput. Technol. 2022, 16, 17483026221130598. [Google Scholar] [CrossRef]
- Wei, Y.; Wu, D. State of health and remaining useful life prediction of lithium-ion batteries with conditional graph convolutional network. Expert Syst. Appl. 2024, 238, 122041. [Google Scholar] [CrossRef]
- Lee, J.; Sun, H.; Liu, Y.; Li, X. A machine learning framework for remaining useful lifetime prediction of li-ion batteries using diverse neural networks. Energy AI 2024, 15, 100319. [Google Scholar] [CrossRef]
- Li, C.; Han, X.; Zhang, Q.; Li, M.; Rao, Z.; Liao, W.; Liu, X.; Liu, X.; Li, G. State-of-health and remaining-useful-life estimations of lithium-ion battery based on temporal convolutional network-long short-term memory. J. Energy Storage 2023, 74, 109498. [Google Scholar] [CrossRef]
- Li, S.; Fang, H.; Shi, B. Remaining useful life estimation of Lithium-ion battery based on interacting multiple model particle filter and support vector regression. Reliab. Eng. Syst. Saf. 2021, 210, 107542. [Google Scholar] [CrossRef]
- Zhang, G.; Wang, J.; Chang, S. Predicting running-in wear volume with a SVMR-based model under a small amount of training samples. Tribol. Int. 2018, 128, 349–355. [Google Scholar] [CrossRef]
- Balogun, A.-L.; Rezaie, F.; Pham, Q.B.; Gigović, L.; Drobnjak, S.; Aina, Y.A.; Panahi, M.; Yekeen, S.T.; Lee, S. Spatial prediction of landslide susceptibility in western Serbia using hybrid support vector regression (SVR) with GWO, BAT and COA algorithms. Geosci. Front. 2021, 12, 101104. [Google Scholar] [CrossRef]
- Liu, M.; Luo, K.; Zhang, J.; Chen, S. A stock selection algorithm hybridizing grey wolf optimizer and support vector regression. Expert Syst. Appl. 2021, 179, 115078. [Google Scholar] [CrossRef]
- Çerçi, K.N.; Hürdoğan, E. Comparative study of multiple linear regression (MLR) and artificial neural network (ANN) techniques to model a solid desiccant wheel. Int. Commun. Heat Mass Transf. 2020, 116, 104713. [Google Scholar] [CrossRef]
- Souyei, B.; Meneceur, S.; Khechekhouche, A. QSPR study on thermal energy of aliphatic Aldehydes using molecular descriptors and MLR technique. Mater. Today Proc. 2022, 51, 2157–2162. [Google Scholar] [CrossRef]
- Egbueri, J.C.; Igwe, O.; Omeka, M.E.; Agbasi, J.C. Development of MLR and variedly optimized ANN models for forecasting the detachability and liquefaction potential index of erodible soils. Geosystems Geoenviron. 2023, 2, 100104. [Google Scholar] [CrossRef]
- Fan, G.-F.; Zhang, L.-Z.; Yu, M.; Hong, W.-C.; Dong, S.-Q. Applications of random forest in multivariable response surface for short-term load forecasting. Int. J. Electr. Power Energy Syst. 2022, 139, 108073. [Google Scholar] [CrossRef]
- Prasojo, R.A.; Putra, M.A.A.; Ekojono; Apriyani, M.E.; Rahmanto, A.N.; Ghoneim, S.S.M.; Mahmoud, K.; Lehtonen, M.; Darwish, M.M.F. Precise transformer fault diagnosis via random forest model enhanced by synthetic minority over-sampling technique. Electr. Power Syst. Res. 2023, 220, 109361. [Google Scholar] [CrossRef]
- Huang, M.; Wang, Q.; Jing, R.; Lou, W.; Hong, Y.; Wang, L. Tropical cyclone full track simulation in the western North Pacific based on random forests. J. Wind Eng. Ind. Aerodyn. 2022, 228, 105119. [Google Scholar] [CrossRef]
- Fang, Z.; Yu, X.; Zeng, Q. Random forest algorithm-based accurate prediction of chemical toxicity to Tetrahymena pyriformis. Toxicology 2022, 480, 153325. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Li, C.; Zhang, S. Application of Six Metaheuristic Optimization Algorithms and Random Forest in the uniaxial compressive strength of rock prediction. Appl. Soft Comput. 2022, 131, 109729. [Google Scholar] [CrossRef]
- Saha, S.; Bera, B.; Shit, P.K.; Bhattacharjee, S.; Sengupta, N. Prediction of forest fire susceptibility applying machine and deep learning algorithms for conservation priorities of forest resources. Remote Sens. Appl. Soc. Environ. 2023, 29, 100917. [Google Scholar] [CrossRef]
- Hua, L.; Zhang, C.; Sun, W.; Li, Y.; Xiong, J.; Nazir, M.S. An evolutionary deep learning soft sensor model based on random forest feature selection technique for penicillin fermentation process. ISA Trans. 2022, 136, 139–151. [Google Scholar] [CrossRef]
- Yuzer, E.O.; Bozkurt, A. Deep learning model for regional solar radiation estimation using satellite images. Ain Shams Eng. J. 2022, 14, 102057. [Google Scholar] [CrossRef]
- Khan, Z.A.; Hussain, T.; Baik, S.W. Boosting energy harvesting via deep learning-based renewable power generation prediction. J. King Saud Univ. Sci. 2022, 34, 101815. [Google Scholar] [CrossRef]
- Lee, Y.; Ha, B.; Hwangbo, S. Generative model-based hybrid forecasting model for renewable electricity supply using long short-term memory networks: A case study of South Korea’s energy transition policy. Renew. Energy 2022, 200, 69–87. [Google Scholar] [CrossRef]
- Karunasingha, D.S.K. Root mean square error or mean absolute error? Use their ratio as well. Inf. Sci. 2022, 585, 609–629. [Google Scholar] [CrossRef]
- Wang, N.; Guo, Y.; Wei, X.; Zhou, M.; Wang, H.; Bai, Y. UAV-based remote sensing using visible and multispectral indices for the estimation of vegetation cover in an oasis of a desert. Ecol. Indic. 2022, 141, 109155. [Google Scholar] [CrossRef]
- Raja, M.N.A.; Abdoun, T.; El-Sekelly, W. Smart prediction of liquefaction-induced lateral spreading. J. Rock Mech. Geotech. Eng. 2023, in press. [Google Scholar] [CrossRef]
- Dou, Z.; Li, J.; Yan, H.; Zhang, C.; Liu, F. Real-Time Online Estimation Technology and Implementation of State of Charge State of Uncrewed Aerial Vehicle Lithium Battery. Energies 2024, 17, 803. [Google Scholar] [CrossRef]
- Wang, X.; Guo, H.; Wang, J.; Wang, L. Predicting the Health Status of an Unmanned Aerial Vehicles Data-Link System Based on a Bayesian Network. Sensors 2018, 18, 3916. [Google Scholar] [CrossRef]
- Ezzouhri, A.; Charouh, Z.; Ghogho, M.; Guennoun, Z. A Data-Driven-Based Framework for Battery Remaining Useful Life Prediction. IEEE Access 2023, 11, 76142–76155. [Google Scholar] [CrossRef]
- Severson, K.A.; Attia, P.M.; Jin, N.; Perkins, N.; Jiang, B.; Yang, Z.; Chen, M.H.; Aykol, M.; Herring, P.K.; Fraggedakis, D.; et al. Data-driven prediction of battery cycle life before capacity degradation. Nat. Energy 2019, 4, 383–391. [Google Scholar] [CrossRef]
- Jiang, Y.; Song, W. Predicting the Cycle Life of Lithium-Ion Batteries Using Data-Driven Machine Learning Based on Discharge Voltage Curves. Batteries 2023, 9, 413. [Google Scholar] [CrossRef]
- Mansouri, S.S.; Karvelis, P.; Georgoulas, G.; Nikolakopoulos, G. Remaining Useful Battery Life Prediction for UAVs based on Machine Learning. IFAC-Pap. 2017, 50, 4727–4732. [Google Scholar] [CrossRef]
- Eleftheroglou, N.; Zarouchas, D.; Loutas, T.; Mansouri, S.S.; Georgoulas, G.; Karvelis, P.; Benedictus, R. Real time Diagnostics and Prognostics of UAV Lithium-Polymer Batteries. Proc. Annu. Conf. Progn. Health Manag. Soc. 2019, 11, 785. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature No. | Input Data | Output Data (Labels) | ||
|---|---|---|---|---|
| I [mA] | U [V] | C [mAh] | Cycle No. | |
| ... | ... | ... | ... | ... |
| i | Ikl | Ukl | Ckl | k -> C_totk |
| ... | ... | ... | ... | ... |
| Algorithm | Hyperparameters | Tuned Value |
|---|---|---|
| SVMR | C | 0.1 |
| kernel | poly | |
| degree | 3.5 | |
| gamma | scale | |
| MLR | fit_intercept | True |
| copy_X | bool | |
| RF | n_estimators | 600 |
| criterion | squared_error | |
| random_state | 1 |
| Performance Indicator | SVMR | MLR | RF |
|---|---|---|---|
| MAE | 1.02 | 67.21 | 1.53 |
| MSE | 51.02 | 87.25 | 63.77 |
| RMSE | 7.14 | 7614.10 | 7.98 |
| R2 Score | 0.99 | 0.93 | 0.99 |
| Year, Ref. | ML Method | Battery | Dataset | Performance |
|---|---|---|---|---|
| [21], 2021. | Hybrid convolutional neural network (CNN), which is based on a fusion of two-dimensional CNN and three-dimensional CNN. | Lithium Iron Phosphate (LFP)/graphite batteries (A123 Systems, model APR18650M1A). | Dataset for 124 commercial LFP/graphite batteries. | MAPE = 3.55, RMSE = 11, MAE = 9 for all test batteries and MAPE = 1.35, RMSE = 4, MAE = 3 for a single battery data. |
| [48], 2023. | Linear Regression (LR), Cat Boost Regressor and Random Forest Regressor. | Li-ion, Battery Electric Vehicles (BEVs). | Dataset for 26 li-ion batteries. | The LR model had the best performance, RMSE = 7.53 and R2 score = 97.83. |
| [49], 2019. | Elastic Net Regression. | LFP/graphite batteries (A123 Systems, modelAPR18650MA). | Dataset consisting of 124 commercial li-ion phosphate/graphite cells. | Primary test for ‘Discharge’ model has RMSE = 91. |
| [50], 2023. | Robust linear regression (RLR) and Gaussian process regression (GPR). | Li-ion batteries. | Three datasets were used, summing up data from 61 li-ion batteries. | The GPR model had the best performance, RMSE = 2.95% and MAE = 1.82%. |
| [51], 2017 | Multi-Layer Perceptron (MLP), Least Absolute Shrinkage and Selection Operator (LASSO), Gradient Boosted Trees (GBT) and Least Square Support Vector machines for Regression (LSSVR). | Li-ion batteries from UAVs. | Six datasets, from six different accumulators. | The GBT model had the best performance for the six Li-ion batteries, Average MAPER = 96.57 and Average Precision = 0.85. |
| [52], 2019. | Non-Homogenous Hidden Semi-Markov model (NHHSMM). | Lithium-Polymer (Li-Po) from UAVs. | Data generated from flight monitoring for 10 Li-Po batteries from UAVs. | The estimated RUL is 95% of the actual RUL, for Battery 1 and Battery 9. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Andrioaia, D.A.; Gaitan, V.G.; Culea, G.; Banu, I.V. Predicting the RUL of Li-Ion Batteries in UAVs Using Machine Learning Techniques. Computers 2024, 13, 64. https://doi.org/10.3390/computers13030064
Andrioaia DA, Gaitan VG, Culea G, Banu IV. Predicting the RUL of Li-Ion Batteries in UAVs Using Machine Learning Techniques. Computers. 2024; 13(3):64. https://doi.org/10.3390/computers13030064
Chicago/Turabian StyleAndrioaia, Dragos Alexandru, Vasile Gheorghita Gaitan, George Culea, and Ioan Viorel Banu. 2024. "Predicting the RUL of Li-Ion Batteries in UAVs Using Machine Learning Techniques" Computers 13, no. 3: 64. https://doi.org/10.3390/computers13030064