Parametric Analysis and Optimization of Radially Layered Cylindrical Piezoceramic/Epoxy Composite Transducers


Abstract
:1. Introduction
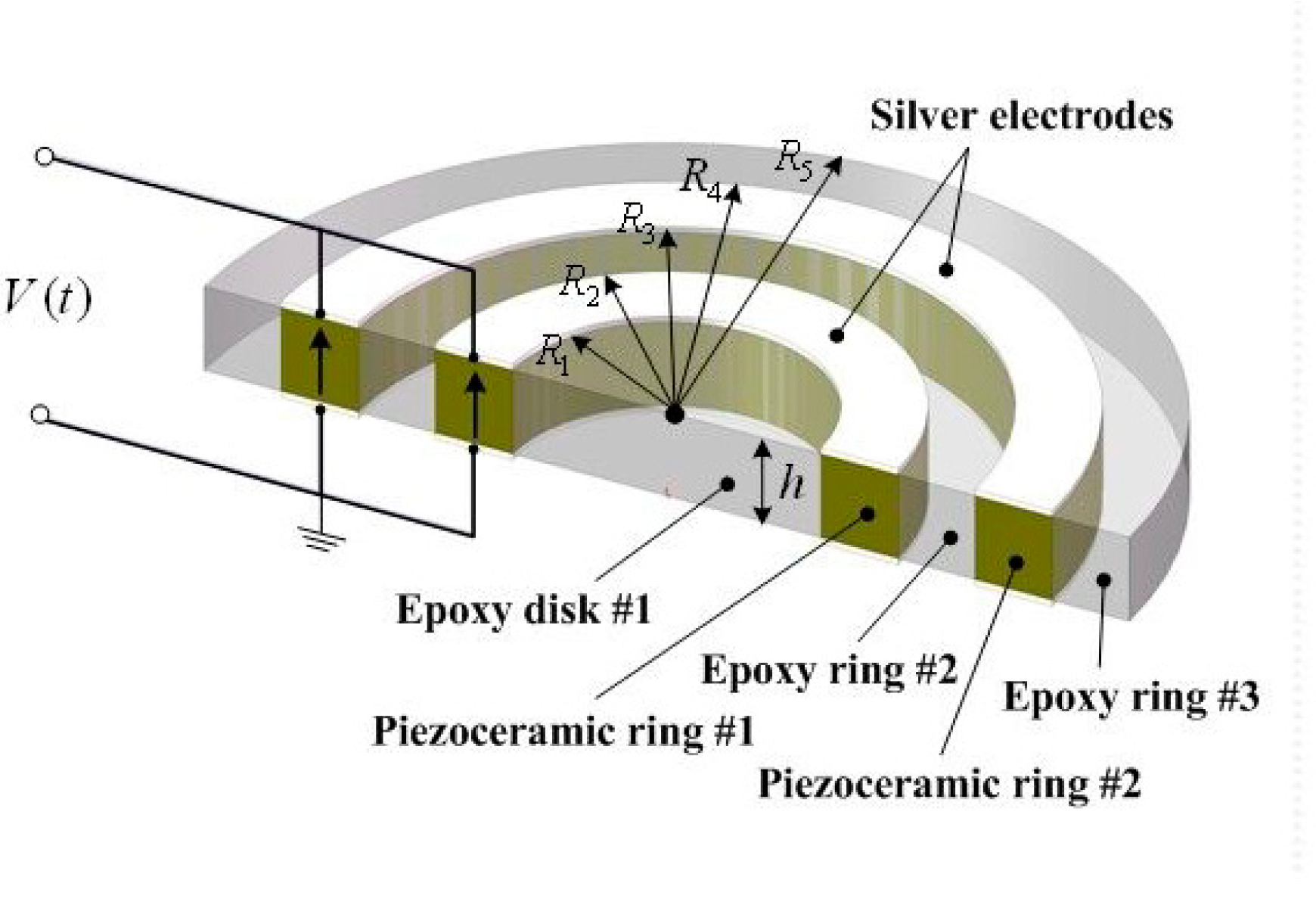
2. Modeling
2.1. Basic Equations
2.2. Solution
3. Validation
3.1. ANSYS Numerical Simulation
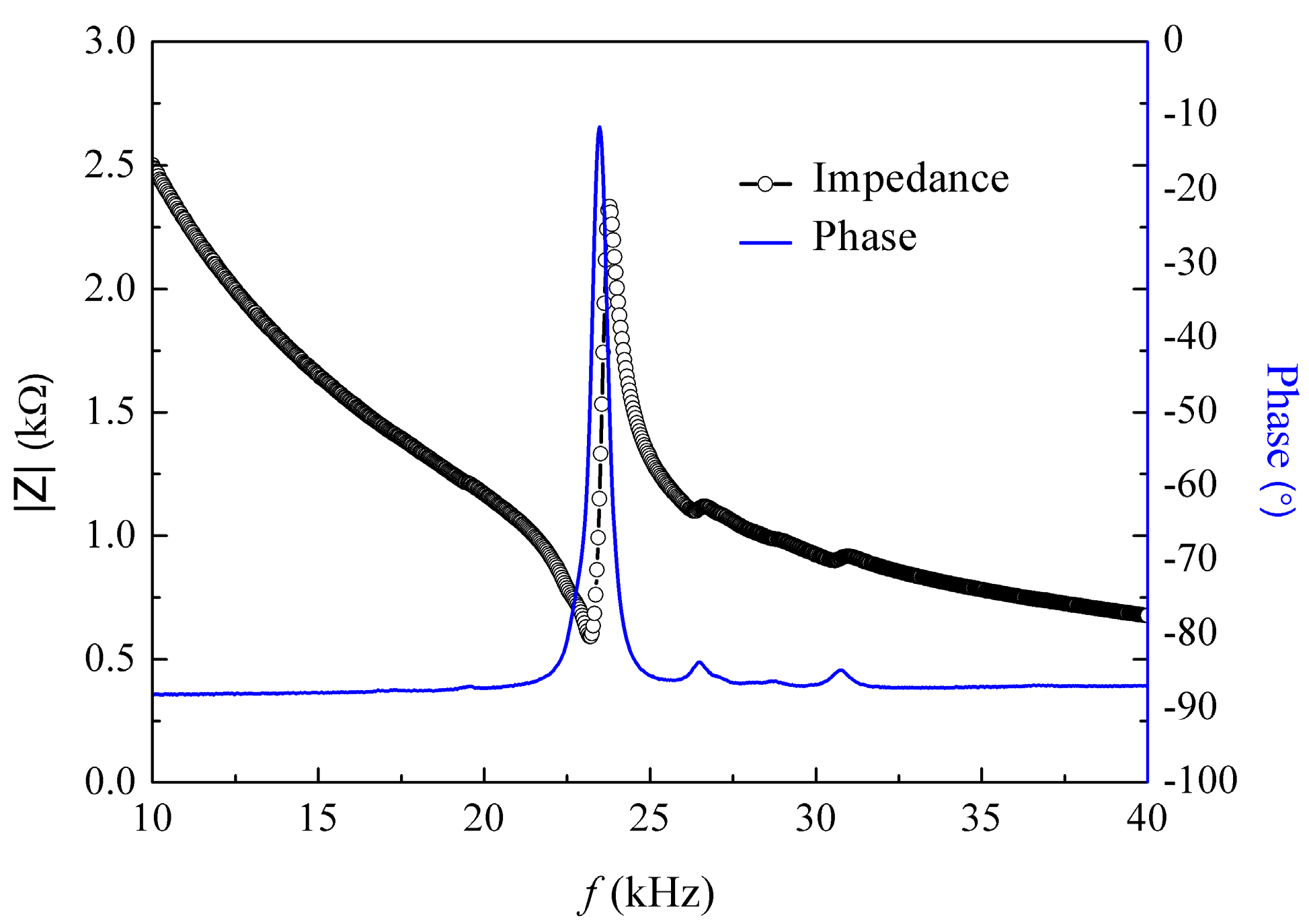
3.2. Experimental Validation
4. Results and Discussion
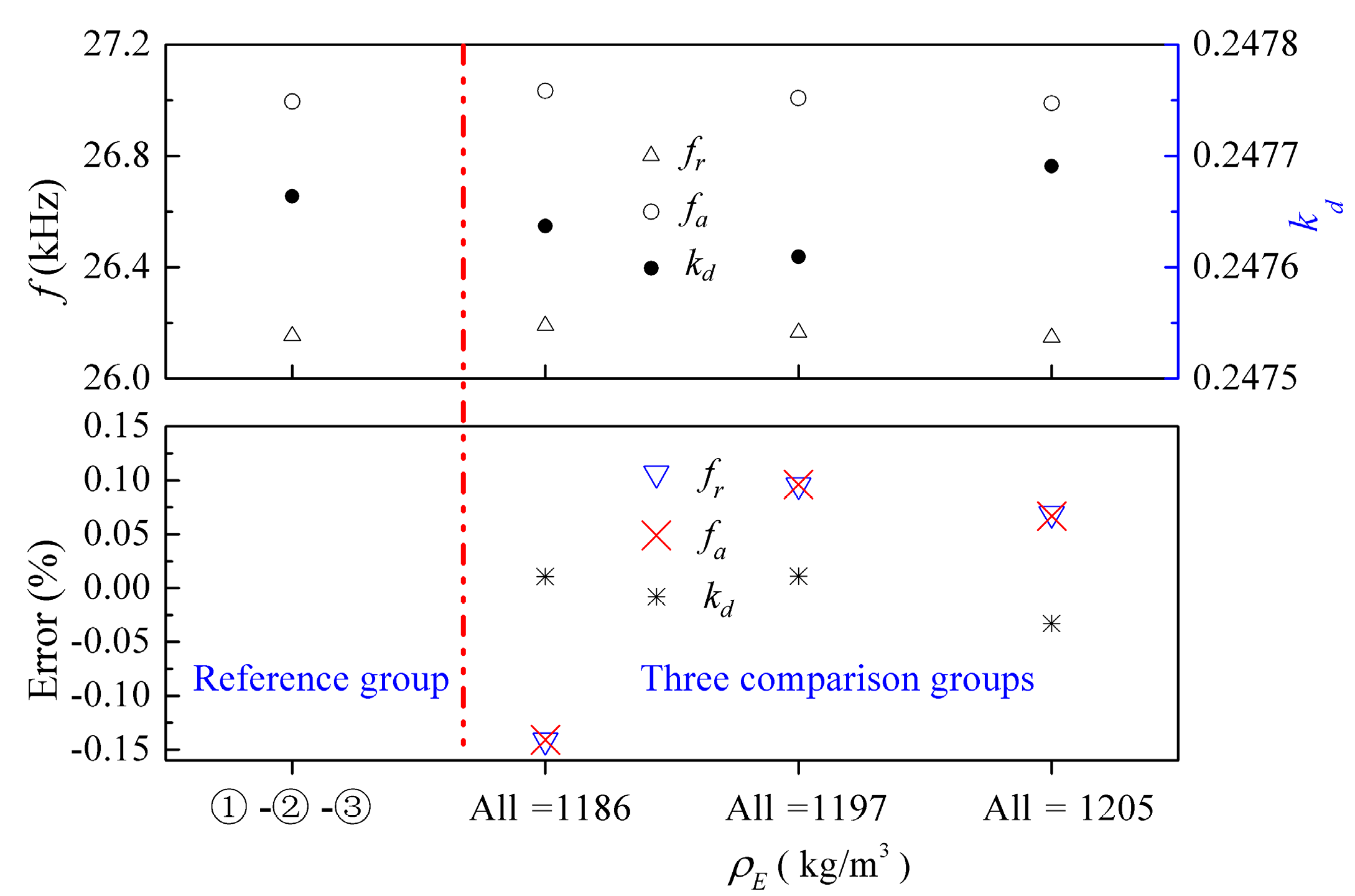
4.1. Effect of Material Parameters of Epoxy Layers
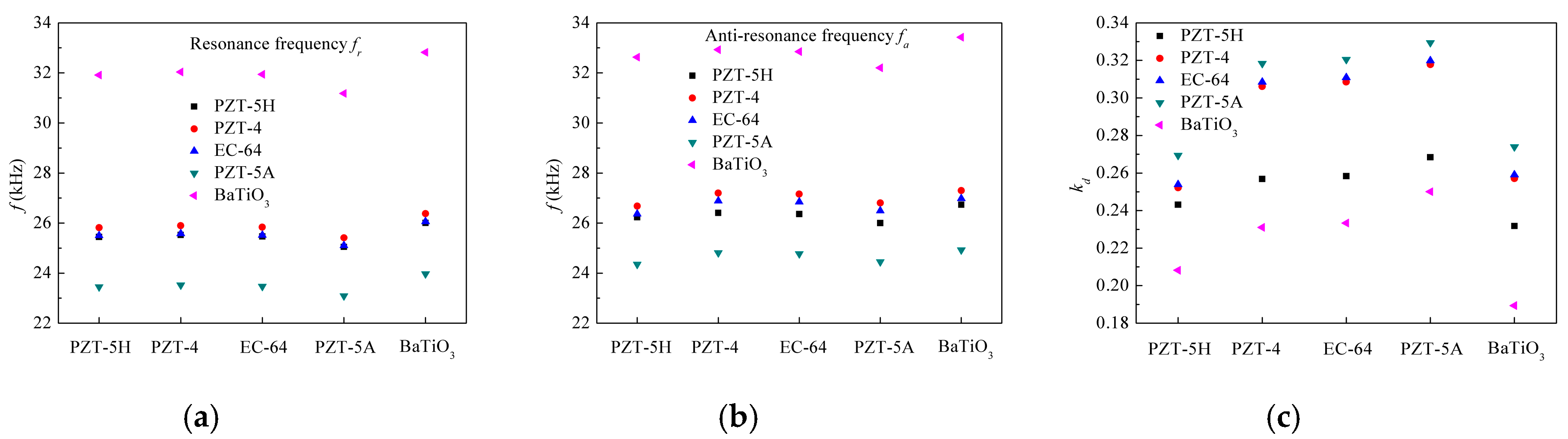
4.2. Effect of Piezoceramic Material Types
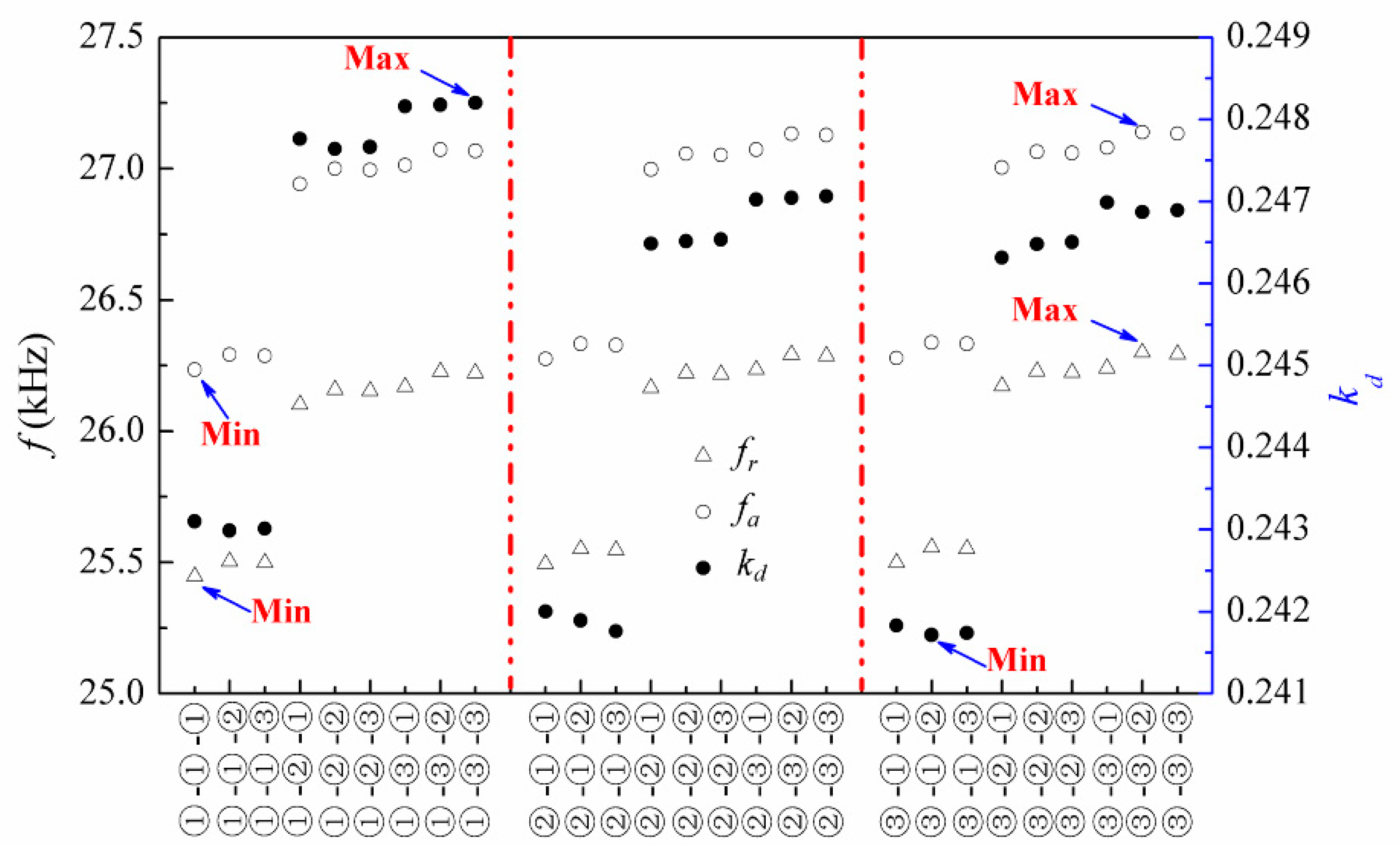
4.3. Effect of Locations of Piezoceramic Rings
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Maréchal, P.; Levassort, F.; Holc, J.; Tran-Huu-Hue, L.-P.; Kosec, M.; Lethiecq, M. High-frequency transducers based on integrated piezoelectric thick films for medical imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2006, 53, 1524–1533. [Google Scholar] [CrossRef] [PubMed]
- Shung, K.K.; Cannata, J.; Zhou, Q. Piezoelectric materials for high frequency medical imaging applications: A review. J. Electroceram. 2007, 19, 141–147. [Google Scholar] [CrossRef]
- Cannata, J.M.; Williams, J.A.; Zhou, Q.; Ritter, T.A.; Shung, K.K. Development of a 35-MHz piezo-composite ultrasound array for medical imaging. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2006, 53, 224–236. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tawie, R.; Lee, H.-K.; Park, S. Non-destructive evaluation of concrete quality using PZT transducers. Smart Struct. Syst. 2010, 6, 851–866. [Google Scholar] [CrossRef]
- Lim, Y.Y.; Kwong, K.Z.; Liew, W.Y.H.; Soh, C.K. Non-destructive concrete strength evaluation using smart piezoelectric transducer—A comparative study. Smart Mater. Struct. 2016, 25, 085021. [Google Scholar] [CrossRef]
- Martins, M.; Correia, V.; Cabral, J.; Lanceros-Mendez, S.; Rocha, J. Optimization of piezoelectric ultrasound emitter transducers for underwater communications. Sens. Actuators A Phys. 2012, 184, 141–148. [Google Scholar] [CrossRef]
- Mosca, F.; Matte, G.; Shimura, T. Low-frequency source for very long-range underwater communication. J. Acoust. Soc. Am. 2013, 133, EL61–EL67. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Ngernchuklin, P.; Vittadello, M.; Akdoğan, E.; Safari, A. Development of 2-2 piezoelectric ceramic/polymer composites by direct-write technique. J. Electroceram. 2010, 24, 219–225. [Google Scholar] [CrossRef]
- Lee, H.J.; Zhang, S.; Bar-Cohen, Y.; Sherrit, S. High temperature, high power piezoelectric composite transducers. Sensors 2014, 14, 14526–14552. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; Zhang, S.; Xu, Z.; Wen, F.; Geng, X.; Lee, H.J.; Shrout, T.R. 1-3 piezoelectric composites for high-temperature transducer applications. J. Phys. D Appl. Phys. 2013, 46, 165306. [Google Scholar] [CrossRef] [PubMed]
- Chabok, H.R.; Cannata, J.M.; Kim, H.H.; Williams, J.A.; Park, J.; Shung, K.K. A high-frequency annular-array transducer using an interdigital bonded 1-3 composite. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 206–214. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Garcia-Gancedo, L.; Olhero, S.M.; Alves, F.J.; Ferreira, J.M.F.; Demore, C.E.M.; Cochran, S.; Button, T.W. Application of gel-casting to the fabrication of 1-3 piezoelectric ceramic-polymer composites for high-frequency ultrasound devices. J. Micromech. Microeng. 2012, 22, 125001. [Google Scholar] [CrossRef]
- Lee, H.J.; Zhang, S.; Geng, X.; Shrout, T.R. Electroacoustic response of 1-3 piezocomposite transducers for high power applications. Appl. Phys. Lett. 2012, 101, 253504. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, H.J.; Zhang, S. Design of low-loss 1-3 piezoelectric composites for high-power transducer applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 1969–1975. [Google Scholar] [PubMed] [Green Version]
- Lee, H.J.; Zhang, S.; Meyer, R.J., Jr.; Sherlock, N.P.; Shrout, T.R. Characterization of piezoelectric ceramics and 1-3 composites for high power transducers. Appl. Phys. Lett. 2012, 101, 032902. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abrar, A.; Zhang, D.; Su, B.; Button, T.W.; Kirk, K.J.; Cochran, S. 1-3 connectivity piezoelectric ceramic-polymer composite transducers made with viscous polymer processing for high frequency ultrasound. Ultrasonics 2004, 42, 479–484. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Or, S.W.; Yue, Q.; Zhang, Y.; Jiao, J.; Ren, B.; Lin, D.; Leung, C.M.; Zhao, X.; Luo, H. Cylindrically shaped ultrasonic linear array fabricated using PIMNT/epoxy 1-3 piezoelectric composite. Sens. Actuators A Phys. 2013, 192, 69–75. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, L.; Qin, L. Equivalent parameter model of 1-3 piezocomposite with a sandwich polymer. Results Phys. 2018, 9, 1256–1261. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, Y.; Lin, X.; Xie, R.; Zhou, K.; Button, T.W.; Zhang, D. Fine-scaled piezoelectric ceramic/polymer 2-2 composites for high-frequency transducer. J. Am. Ceram. Soc. 2014, 97, 1060–1064. [Google Scholar] [CrossRef]
- Cannata, J.M.; Williams, J.A.; Zhang, L.; Hu, C.-H.; Shung, K.K. A high-frequency linear ultrasonic array utilizing an interdigitally bonded 2-2 piezo-composite. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 2202–2212. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ritter, T.A.; Shrout, T.R.; Tutwiler, R.; Shung, K.K. A 30-MHz piezo-composite ultrasound array for medical imaging applications. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2002, 49, 217–230. [Google Scholar] [CrossRef] [PubMed]
- Banerjee, S.; Cook-Chennault, K.A. Influence of al particle size and lead zirconate titanate (PZT) volume fraction on the dielectric properties of pzt-epoxy-aluminum composites. J. Eng. Mater. Technol. 2011, 133, 041016. [Google Scholar] [CrossRef]
- Banerjee, S.; Cook-Chennault, K.A. An investigation into the influence of electrically conductive particle size on electromechanical coupling and effective dielectric strain coefficients in three phase composite piezoelectric polymers. Compos. Part A Appl. Sci. Manuf. 2012, 43, 1612–1619. [Google Scholar] [CrossRef]
- Sundar, U.; Cook-Chennault, K.A.; Banerjee, S.; Refour, E. Dielectric and piezoelectric properties of percolative three-phase piezoelectric polymer composites. J. Vac. Sci. Technol. B 2016, 34, 041232. [Google Scholar] [CrossRef]
- Lin, S. Effect of electric load impedances on the performance of sandwich piezoelectric transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2004, 51, 1280–1286. [Google Scholar] [PubMed]
- Lin, S. Analysis of multifrequency langevin composite ultrasonic transducers. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2009, 56, 1990–1998. [Google Scholar] [PubMed]
- Lin, S.; Xu, C. Analysis of the sandwich ultrasonic transducer with two sets of piezoelectric elements. Smart Mater. Struct. 2008, 17, 065008. [Google Scholar] [CrossRef]
- Arnold, F.J.; Bravo-Roger, L.L.; Gonçalves, M.S.; Grilo, M. Characterization of sandwiched piezoelectric transducers-a complement for teaching electric circuits. Lat.-Am. J. Phys. Educ. 2012, 6, 216–220. [Google Scholar]
- Arnold, F.J.; Mühlen, S.S. The resonance frequencies on mechanically pre-stressed ultrasonic piezotransducers. Ultrasonics 2001, 39, 1–5. [Google Scholar] [CrossRef]
- Adelman, N.T.; Stavsky, Y.; Segal, E. Axisymmetric vibrations of radially polarized piezoelectric ceramic cylinders. J. Sound Vib. 1975, 38, 245–254. [Google Scholar] [CrossRef]
- Ebenezer, D.D.; Abraham, P. Eigenfunction analysis of radially polarized piezoelectric cylindrical shells of finite length. J. Acoust. Soc. Am. 1997, 102, 1549–1558. [Google Scholar] [CrossRef]
- Hussein, M.; Heyliger, P. Discrete layer analysis of axisymmetric vibrations of laminated piezoelectric cylinders. J. Sound Vib. 1996, 192, 995–1013. [Google Scholar] [CrossRef]
- Kim, J.O.; Hwang, K.K.; Jeong, H.G. Radial vibration characteristics of piezoelectric cylindrical transducers. J. Sound Vib. 2004, 276, 1135–1144. [Google Scholar] [CrossRef]
- Kim, J.O.; Lee, J.G. Dynamic characteristics of piezoelectric cylindrical transducers with radial polarization. J. Sound Vib. 2007, 300, 241–249. [Google Scholar] [CrossRef]
- Li, X.F.; Peng, X.L.; Lee, K.Y. Radially polarized functionally graded piezoelectric hollow cylinders as sensors and actuators. Eur. J. Mech. A Solids 2010, 29, 704–713. [Google Scholar] [CrossRef]
- Lin, S. Electro-mechanical equivalent circuit of a piezoelectric ceramic thin circular ring in radial vibration. Sens. Actuators A Phys. 2007, 134, 505–512. [Google Scholar] [CrossRef]
- Lin, S.; Wang, S.J.; Fu, Z.Q. Electro-mechanical equivalent circuit for the radial vibration of the radially poled piezoelectric ceramic long tubes with arbitrary wall thickness. Sens. Actuators A Phys. 2012, 180, 87–96. [Google Scholar] [CrossRef]
- Piao, C.; Kim, J.O. Vibration characteristics of a piezoelectric transducer laminated with piezoelectric disks. Noise Control Eng. J. 2016, 64, 444–458. [Google Scholar] [CrossRef]
- Piao, C.; Kim, J.O. Vibration characteristics of an ultrasonic transducer of two piezoelectric discs. Ultrasonics 2017, 74, 72–80. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.T.; Shi, Z.F. Exact analyses for two kinds of piezoelectric hollow cylinders with graded properties. Smart Struct. Syst. 2010, 6, 975–989. [Google Scholar] [CrossRef]
- Zhang, T.T.; Shi, Z.F.; Spencer, B.F., Jr. Vibration analysis of a functionally graded piezoelectric cylindrical actuator. Smart Mater. Struct. 2008, 17, 025018. [Google Scholar] [CrossRef]
- Ebenezer, D.D. Determination of complex coefficients of radially polarized piezoelectric ceramic cylindrical shells using thin shell theory. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2004, 51, 1209–1215. [Google Scholar] [CrossRef] [PubMed]
- Ebenezer, D.D.; Joseph, L. Frequency-dependent open-circuit acoustic sensitivity of fluid-filled, coated, radially polarized piezoelectric ceramic cylindrical shells of arbitrary thickness and infinite length. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2001, 48, 914–921. [Google Scholar] [CrossRef] [PubMed]
- Huan, Q.; Miao, H.; Li, F. A uniform-sensitivity omnidirectional shear-horizontal (SH) wave transducer based on a thickness poled, thickness-shear (d15) piezoelectric ring. Smart Mater. Struct. 2017, 26, 08LT01. [Google Scholar] [CrossRef] [Green Version]
- Huan, Q.; Miao, H.; Li, F. A variable-frequency structural health monitoring system based on omnidirectional shear horizontal wave piezoelectric transducers. Smart Mater. Struct. 2018, 27, 025008. [Google Scholar] [CrossRef] [Green Version]
- Gao, W.; Huo, L.; Li, H.; Song, G. Smart concrete slabs with embedded tubular pzt transducers for damage detection. Smart Mater. Struct. 2018, 27, 025002. [Google Scholar] [CrossRef]
- Gao, W.; Huo, L.; Li, H.; Song, G. An embedded tubular PZT transducer based damage imaging method for two-dimensional concrete structures. IEEE Access 2018, 6, 30100–30109. [Google Scholar] [CrossRef]
- Hu, J.; Lin, S.; Zhang, X.; Wang, Y. Radially sandwiched composite transducers composed of the radially polarized piezoelectric ceramic circular ring and metal rings. Acta Acust. United Acust. 2014, 100, 418–426. [Google Scholar] [CrossRef]
- Cui, M.-T.; Xue, S.; Guo, R.-B.; Su, M.; Li, Y.-C.; Qian, M. Design and fabrication of cylindrical transducer based on 2-2 piezoelectric composite. In Proceedings of the 2015 Symposium on Piezoelectricity, Acoustic Waves, and Device Applications (SPAWDA), Jinan, China, 30 October–2 November 2015; pp. 277–281. [Google Scholar]
- Zhou, D.; Cheung, K.F.; Chen, Y.; Lau, S.T.; Zhou, Q.; Shung, K.K.; Luo, H.S.; Dai, J.; Chan, H.L.W. Fabrication and performance of endoscopic ultrasound radial arrays based on PMN-PT single crystal/epoxy 1-3 composite. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 477–484. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, H.; Wang, L. High frequency wide band underwater acoustic transducer for ring shaped composite material. Acta Acust. 2017, 42, 53–59. [Google Scholar]
- Wang, J.J.; Qin, L.; Song, W.B.; Shi, Z.F.; Song, G. Electromechanical characteristics of radially layered piezoceramic/epoxy cylindrical composite transducers: Theoretical solution, numerical simulation and experimental verification. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2018, 65, 1643–1656. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.J.; Shi, Z.F. Dynamic characteristics of an axially polarized multilayer piezoelectric/elastic composite cylindrical transducer. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2013, 60, 2196–2203. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.J.; Shi, Z.F. Models for designing radially polarized multilayer piezoelectric/elastic composite cylindrical transducers. J. Intell. Mater. Syst. Struct. 2016, 27, 500–511. [Google Scholar] [CrossRef]
- Mason, W.P. Piezoelectric Crystals and Their Application to Ultrasonics; Van Nostrand Reinhold: New York, NY, USA, 1950. [Google Scholar]
- Kim, D.; Kim, J.O.; Il Jung, S. Vibration characteristics of a piezoelectric open-shell transducer. J. Sound Vib. 2012, 331, 2038–2054. [Google Scholar] [CrossRef]
- Butler, J.L.; Sherman, C.H. Transducers and Arrays for Underwater Sound; Springer: Cham, Switzerland, 2016. [Google Scholar]
- Berlincourt, D.; Cmolik, C.; Jaffe, H. Piezoelectric properties of polycrystalline lead titanate zirconate compositions. Proc. IRE 1960, 48, 220–229. [Google Scholar] [CrossRef]
- Avellaneda, M.; Swart, P.J. Calculating the performance of 1–3 piezoelectric composites for hydrophone applications: An effective medium approach. J. Acoust. Soc. Am. 1998, 103, 1449–1467. [Google Scholar] [CrossRef]
- Hayward, G.; Bennett, J.; Hamilton, R. A theoretical study on the influence of some constituent material properties on the behavior of 1-3 connectivity composite transducers. J. Acoust. Soc. Am. 1995, 98, 2187–2196. [Google Scholar] [CrossRef]
- Smith, W.A. Optimizing electromechanical coupling in piezocomposites using polymers with negative poisson’s ratio. In Proceedings of the IEEE 1991 Ultrasonics Symposium, Orlando, FL, USA, 8–11 December 1991; pp. 661–666. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Types | Elastic Constant | Piezoelectric Constant | Dielectric Constant | Density | Radial Sound Speed | Plane Electromechanical Coupling Factor | |
|---|---|---|---|---|---|---|---|
| PZT-5H | 13 | −4.29 | −186 | 4500 | 7450 | 3404 | 0.45 |
| PZT-4 | 12.3 | −4.05 | −123 | 1300 | 7500 | 3487 | 0.56 |
| EC-64 | 12.8 | −4.2 | −127 | 1300 | 7500 | 3417 | 0.57 |
| PZT-5A | 16.4 | −5.74 | −171 | 1700 | 7750 | 2994 | 0.60 |
| BaTiO3 | 8.55 | −2.61 | −79 | 1900 | 5700 | 4757 | 0.35 |
| Epoxy Types | Young’s Modulus | Poisson’s Ratio | Density |
|---|---|---|---|
| ① | 2301.47 | 0.43 | 1186 |
| ② | 2862.17 | 0.43 | 1197 |
| ③ | 2930 | 0.43 | 1205 |
| First Resonance and Anti-Resonance Frequencies | Theory (kHz) | ANSYS (kHz) | Error 1 (%) | Experiment (kHz) | Error 2 (%) |
|---|---|---|---|---|---|
| fr | 26.154 | 26.497 | −1.31 | 23.179 | 11.37 |
| fa | 26.995 | 27.504 | −1.89 | 23.780 | 11.91 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Qin, L.; Li, W.; Song, W. Parametric Analysis and Optimization of Radially Layered Cylindrical Piezoceramic/Epoxy Composite Transducers. Micromachines 2018, 9, 585. https://doi.org/10.3390/mi9110585
Wang J, Qin L, Li W, Song W. Parametric Analysis and Optimization of Radially Layered Cylindrical Piezoceramic/Epoxy Composite Transducers. Micromachines. 2018; 9(11):585. https://doi.org/10.3390/mi9110585
Chicago/Turabian StyleWang, Jianjun, Lei Qin, Weijie Li, and Weibin Song. 2018. "Parametric Analysis and Optimization of Radially Layered Cylindrical Piezoceramic/Epoxy Composite Transducers" Micromachines 9, no. 11: 585. https://doi.org/10.3390/mi9110585