
Novel Capacitive Sensing System Design of a Microelectromechanical Systems Accelerometer for Gravity Measurement Applications


Abstract
:
1. Introduction
2. Capacitive Detection System Design
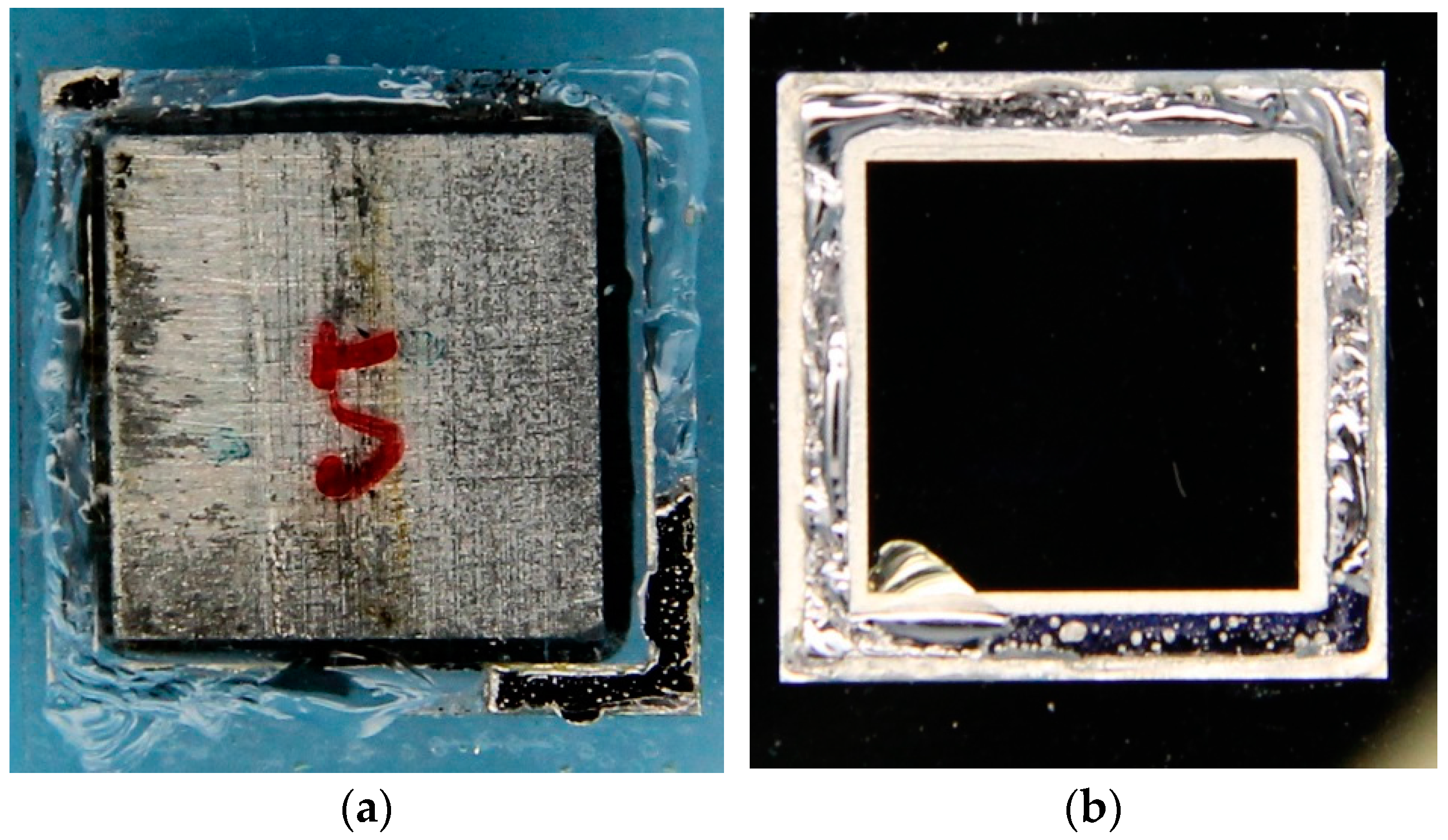
3. Fabrication
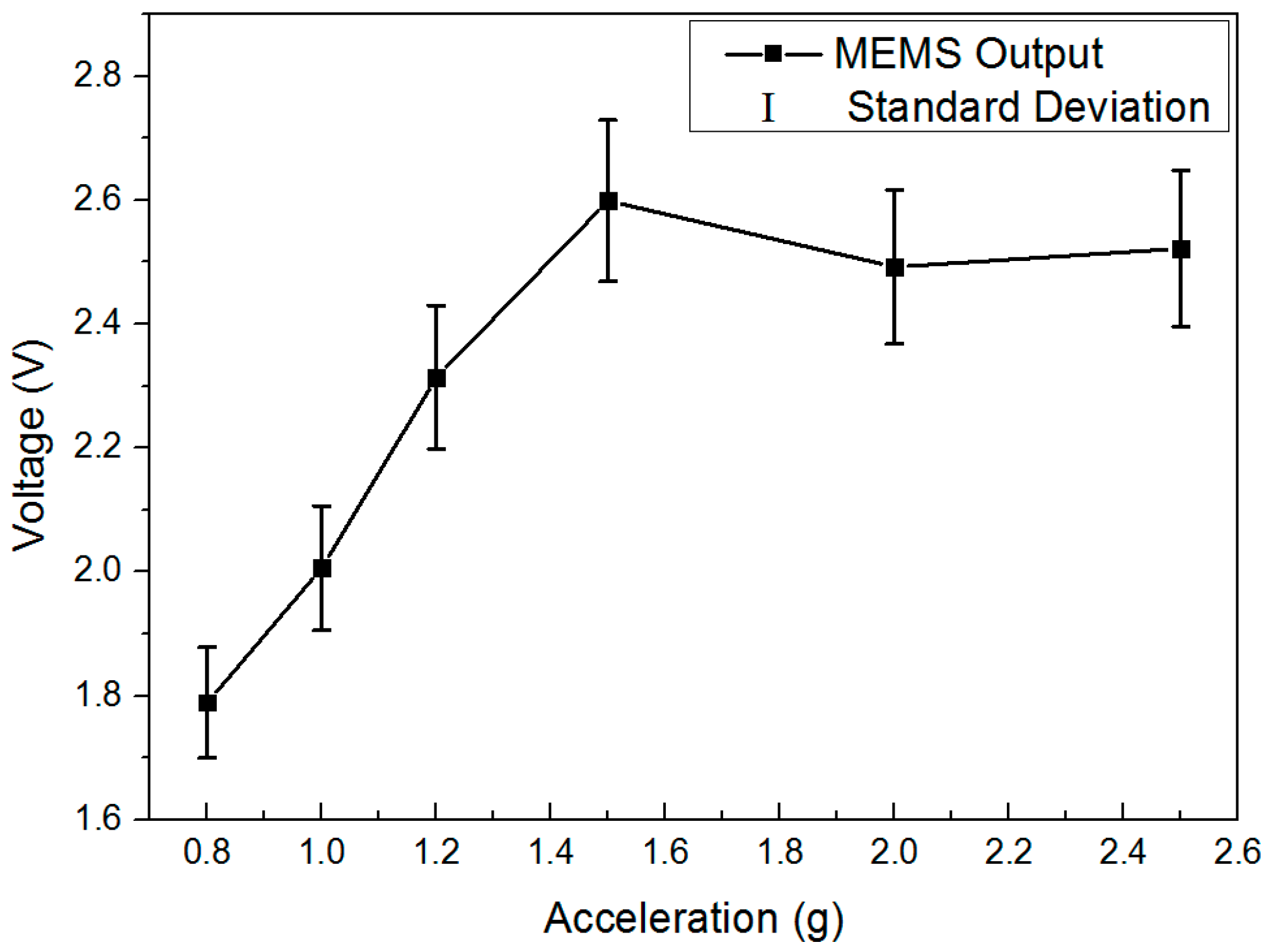
4. Characterization Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Eddy, D.S.; Sparks, D.R. Application of MEMS technology in automotive sensors and actuators. Proc. IEEE 1998, 86, 1747–1755. [Google Scholar] [CrossRef]
- Bogue, R. Recent developments in MEMS sensors: A review of applications, markets and technologies. Sens. Rev. 2013, 33, 300–304. [Google Scholar] [CrossRef]
- Lee, H.K.; Chang, S.I.; Yoon, E. A flexible polymer tactile sensor: Fabrication and modular expandability for large area deployment. J. Microelectromech. Syst. 2006, 15, 1681–1686. [Google Scholar] [CrossRef]
- Iguchi, S.; Kudo, H.; Saito, T.; Ogawa, M.; Saito, H.; Otsuka, K.; Funakubo, A.; Mitsubayashi, K. A flexible and wearable biosensor for tear glucose measurement. Biomed. Microdevices 2007, 9, 603–609. [Google Scholar] [CrossRef] [PubMed]
- Pike, W.T.; Kumar, S. Improved design of micromachined lateral suspensions using intermediate frames. J. Micromech. Microeng. 2007, 17, 1680–1694. [Google Scholar] [CrossRef]
- Krishnamoorthy, U.; Olsson, R.H., III; Bogart, G.R.; Baker, M.S.; Carr, D.W.; Swiler, T.P.; Clews, P.J. In-plane MEMS-based nano-g accelerometer with sub-wavelength optical resonant sensor. Sens. Actuators A Phys. 2008, 145, 283–290. [Google Scholar] [CrossRef]
- Pike, W.T.; Standley, I.M.; Karl, W.J.; Kumar, S.; Stemple, T.; Vijendran, S.J.; Hopf, T. Design, fabrication and testing of a micromachined seismometer with nano-g resolution. In Proceedings of the International Conference on Solid-State Sensors, Actuators and Microsystems, Denver, CO, USA, 21–25 June 2009; pp. 668–671.
- Chae, J.; Kulah, H.; Najafi, K. An in-plane high-sensitivity, low-noise micro-g silicon accelerometer with CMOS readout circuitry. J. Microelectromech. Syst. 2004, 13, 628–635. [Google Scholar] [CrossRef]
- Tu, L.C.; Wang, Z.W.; Liu, J.Q.; Huang, X.Q.; Li, Z.; Xie, Y.F.; Luo, J. Implementation of the scale factor balance on two pairs of quartz-flexure capacitive accelerometers by trimming bias voltage. Rev. Sci. Instrum. 2014, 85, 095108. [Google Scholar] [CrossRef] [PubMed]
- Gardner, J.W. Microsensors: Prnciples and Applications; John Wiley & Sons: New York, NY, USA, 1994. [Google Scholar]
- Becker, P.; Seyfried, P.; Siegert, H. The lattice parameter of highly pure silicon single crystals. Z. Phys. B Condens. Matter 1982, 48, 17–21. [Google Scholar] [CrossRef]
- Kovacs, G.T.A. Micromachined Transducers Sourcebook; McGraw-Hill: Boston, MA, USA, 1998. [Google Scholar]
- Myer, K. Handbook of Materials Selection; John Wiley & Sons: New York, NY, USA, 2002. [Google Scholar]
- Mueller, G.; Hoffmann, M.; Neeff, R. Hydrogen substitution in lithium-aluminosilicates. J. Mater. Sci. 1988, 23, 1779–1785. [Google Scholar] [CrossRef]
- Middlemiss, R.P.; Samarelli, A.; Paul, D.J.; Hough, J.; Rowan, S.; Hammond, G.D. Measurement of the earth tides with a MEMS gravimeter. Nature 2016, 531, 614–617. [Google Scholar] [CrossRef] [PubMed]
- Fan, J.; Peng, L.; Li, K.H.; Tan, C.S. Wafer-level hermetic packaging of 3D microsystems with low-temperature Cu-to-Cu thermo-compression bonding and its reliability. J. Micromech. Microeng. 2012, 22, 105004. [Google Scholar] [CrossRef]
- Fan, J.; Lim, D.F.; Tan, C.S. Effects of surface treatment on the bonding quality of wafer-level Cu-to-Cu thermo-compression bonding for 3D integration. J. Micromech. Microeng. 2013, 23, 045025. [Google Scholar] [CrossRef]
- Antypas, G.A.; Edgecumbe, J. Glass-sealed gaas-algaas transmission photocathode. Appl. Phys. Lett. 1975, 26, 371–372. [Google Scholar] [CrossRef]
- Fan, J.; Anantha, P.; Liu, C.Y.; Bergkvist, M.; Wang, H.; Tan, C.S. Thermal characteristics of InP-Al2O3/Si low temperature heterogeneous direct bonding for photonic device integration. ECS J. Solid State Sci. Technol. 2013, 2, N169–N174. [Google Scholar] [CrossRef]
- Chua, S.L.; Razzaq, A.; Wee, K.H.; Li, K.H.; Yu, H.; Tan, C.S. TSV-less 3D stacking of MEMS and CMOS via low temperature Al-Au direct bonding with simultaneous formation of hermetic seal. In Proceedings of the IEEE 64th Electronic Components and Technology Conference (ECTC), Orlando, FL, USA, 27–30 May 2014; pp. 324–331.
- Liu, C.H.; Kenny, T.W. A high-precision, wide-bandwidth micromachined tunneling accelerometer. J. Microelectromech. Syst. 2001, 10, 425–433. [Google Scholar]
- Yeh, C.W.; Najafi, K. CMOS interface circuitry for a low-voltage micromachined tunneling accelerometer. J. Microelectromech. Syst. 1998, 7, 6–15. [Google Scholar]
- Cooper, E.B.; Post, E.R.; Griffith, S.; Levitan, J.; Manalis, S.R.; Schmidt, M.A.; Quate, C.F. High-resolution micromachined interferometric accelerometer. Appl. Phys. Lett. 2000, 76, 3316–3318. [Google Scholar] [CrossRef]
- Loh, N.C.; Schmidt, M.A.; Manalis, S.R. Sub-10 cm3 interferometric accelerometer with nano-g resolution. J. Microelectromech. Syst. 2002, 11, 182–187. [Google Scholar] [CrossRef]
- Abdolvand, R.; Amini, B.V.; Ayazi, F. Sub-micro-gravity in-plane accelerometers with reduced capacitive gaps and extra seismic mass. J. Microelectromech. Syst. 2007, 16, 1036–1043. [Google Scholar] [CrossRef]
- Homeijer, B.; Lazaroff, D.; Milligan, D.; Alley, R.; Wu, J.; Szepesi, M.; Bicknell, B.; Zhang, Z.; Walmsley, R.G.; Hartwell, P.G. Hewllett packard’s seismic grande MEMS accelerometer. In Proceedings of the IEEE 24th International Conference on Micro Electro Mechanical Systems (MEMS), Cancun, Mexico, 23–27 January 2011; pp. 585–588.
- Laine, J.; Mougenot, D. A high-sensitivity MEMS-based accelerometer. Lead. Edge 2014, 33, 1234–1242. [Google Scholar] [CrossRef]
- Lee, J.B. Falcon gravity gradiometer technology. Explor. Geophys. 2001, 32, 247–250. [Google Scholar] [CrossRef]
- Metzger, E.H. Recent gravity gradiometer developments. In Proceedings of the Guidance and Control Conference, Hollywood, FL, USA, 8–10 August 1977; pp. 306–315.
- Chae, J.; Kulah, H.; Najafi, K. A CMOS-compatible high aspect ratio silicon-on-glass in-plane micro-accelerometer. J. Micromech. Microeng. 2005, 15, 336–345. [Google Scholar] [CrossRef]
- Amini, B.V.; Ayazi, F. Micro-gravity capacitive silicon-on-insulator accelerometers. J. Micromech. Microeng. 2005, 15, 2113–2120. [Google Scholar] [CrossRef]
- Hsu, Y.-W.; Chen, J.-Y.; Chien, H.-T.; Chen, S.; Lin, S.-T.; Liao, L.-P. New capacitive low-g triaxial accelerometer with low cross-axis sensitivity. J. Micromech. Microeng. 2010, 20, 055019. [Google Scholar] [CrossRef]
- Pike, W.T.; Standley, I.M.; Trnkoczy, A. Micro-Machined Accelerometer. U.S. Patent 6,776,042, 17 August 2004. [Google Scholar]
- Pike, W.T.; Delahunty, A.K.; Mukherjee, A.; Guangbin, D.; Huafeng, L.; Calcutt, S.; Standley, I.M. A self-levelling nano-g silicon seismometer. In Proceedings of the 2014 IEEE Sensors, Valencia, Spain, 2–5 November 2014; pp. 1599–1602.
- Gabrielson, T.B. Mechanical-thermal noise in micromachined acoustic and vibration sensors. IEEE Trans. Electron. Dev. 1993, 40, 903–908. [Google Scholar] [CrossRef]
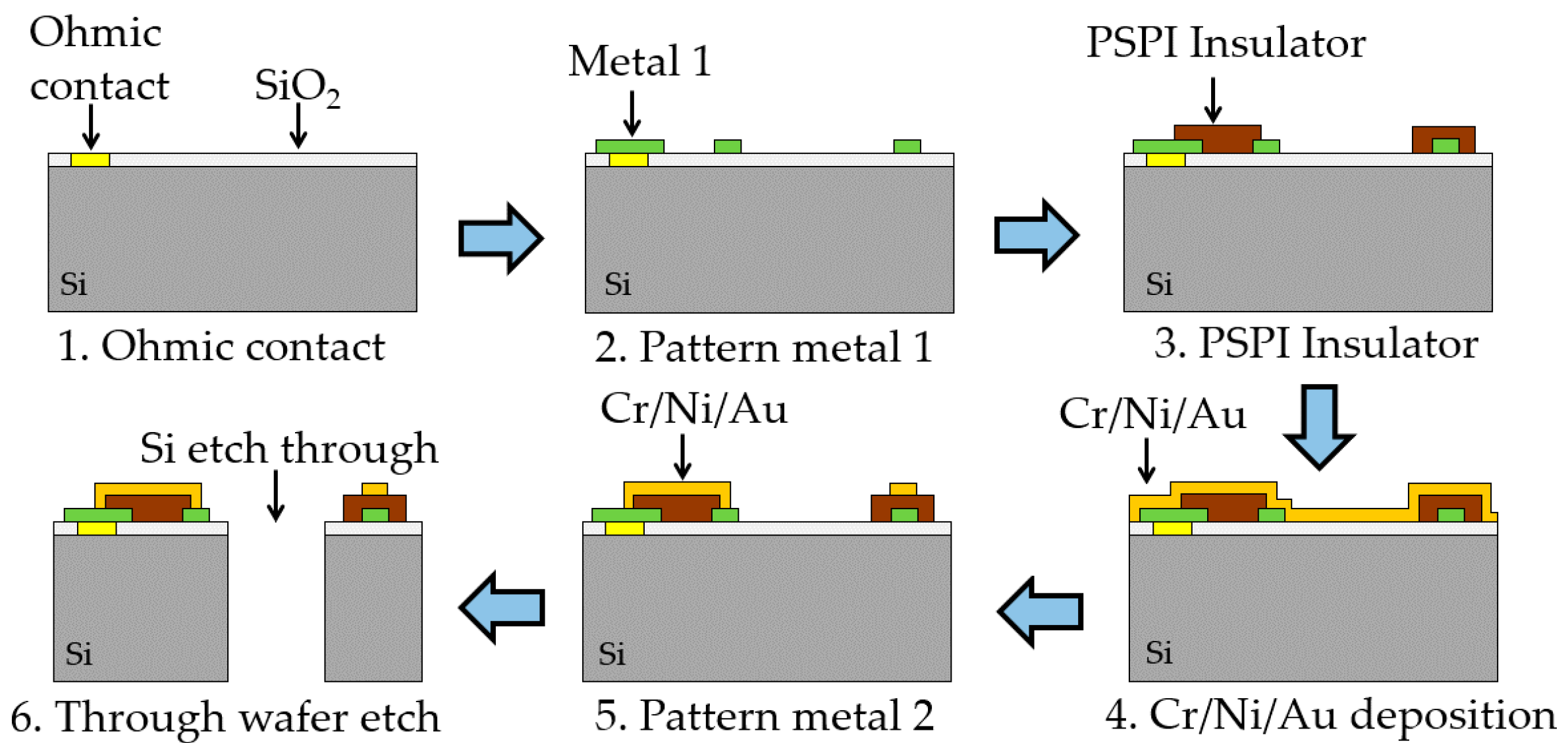
- Werner, J.H.; Spadaccini, U.; Banhart, F. Low-temperature ohmic Au/Sb contacts to n-type Si. J. Appl. Phys. 1994, 75, 994–997. [Google Scholar] [CrossRef]
- Fan, J.; Zhu, T.; Wu, W.J.; Tang, S.H.; Liu, J.Q.; Tu, L.C. Low temperature photosensitive polyimide based insulating layer formation for microelectromechanical systems applications. J. Electron. Mater. 2015, 44, 4891–4897. [Google Scholar] [CrossRef]
- Wu, W.J.; Zhu, T.; Liu, J.Q.; Fan, J.; Tu, L.C. Polyimide-damage-free, CMOS-compatible removal of polymer residues from deep reactive ion etching passivation. J. Electron. Mater. 2015, 44, 991–998. [Google Scholar] [CrossRef]
- Tian, W.; Wu, S.C.; Zhou, Z.B.; Qu, S.B.; Bai, Y.Z.; Luo, J. High resolution space quartz-flexure accelerometer based on capacitive sensing and electrostatic control technology. Rev. Sci. Instrum. 2012, 83, 065001. [Google Scholar] [CrossRef] [PubMed]
- Hu, M.; Bai, Y.Z.; Zhou, Z.B.; Li, Z.X.; Luo, J. Resonant frequency detection and adjustment method for a capacitive transducer with differential transformer bridge. Rev. Sci. Instrum. 2014, 85, 095002. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.Q.; Zhan, B.F.; Wang, Q.L.; Shao, C.G.; Tu, L.C.; Tan, W.H.; Luo, J. Test of the gravitational inverse square law at millimeter ranges. Phys. Rev. Lett. 2012, 108, 081101. [Google Scholar] [CrossRef] [PubMed]
- Huang, A.T.; Chou, C.-K.; Chen, C. Hermetic packaging using eutectic snpb solder and Cr/Ni/Cu metallurgy layer. IEEE Trans. Adv. Packag. 2006, 29, 760–765. [Google Scholar] [CrossRef]
- US Department of Defense. Test Methods and Procedures for Microelectronics; MIL-STD-883E; US Department of Defence: Washington DC, USA, 1995.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Young’s Modulus (GPa) | Yield Strength (Mpa) | Coefficient of Thermal Expansion 10−6 (/°C) at 20 °C |
|---|---|---|---|
| Single-Crystal Silicon <111> | 190 [10] | 6900 [10] | 2.56 [11] |
| Stainless Steel | 200 [12] | 2100 [12] | 11.9–18 [13] |
| Beryllium Bronze | 128 [13] | 400 [13] | 17.8 [13] |
| Quartz | 380 [10] | 14000 [10] | 0.5 [14] |
| Symbol | Properties | Value |
|---|---|---|
| LDevice | Device length | 44.5 mm |
| WDevice | Device width | 32.2 mm |
| LMass | Mass length | 18 mm |
| WDevice | Mass width | 15 mm |
| T | Wafer thickness | 500 μm |
| m | Weight of the proof mass | 0.31 g |
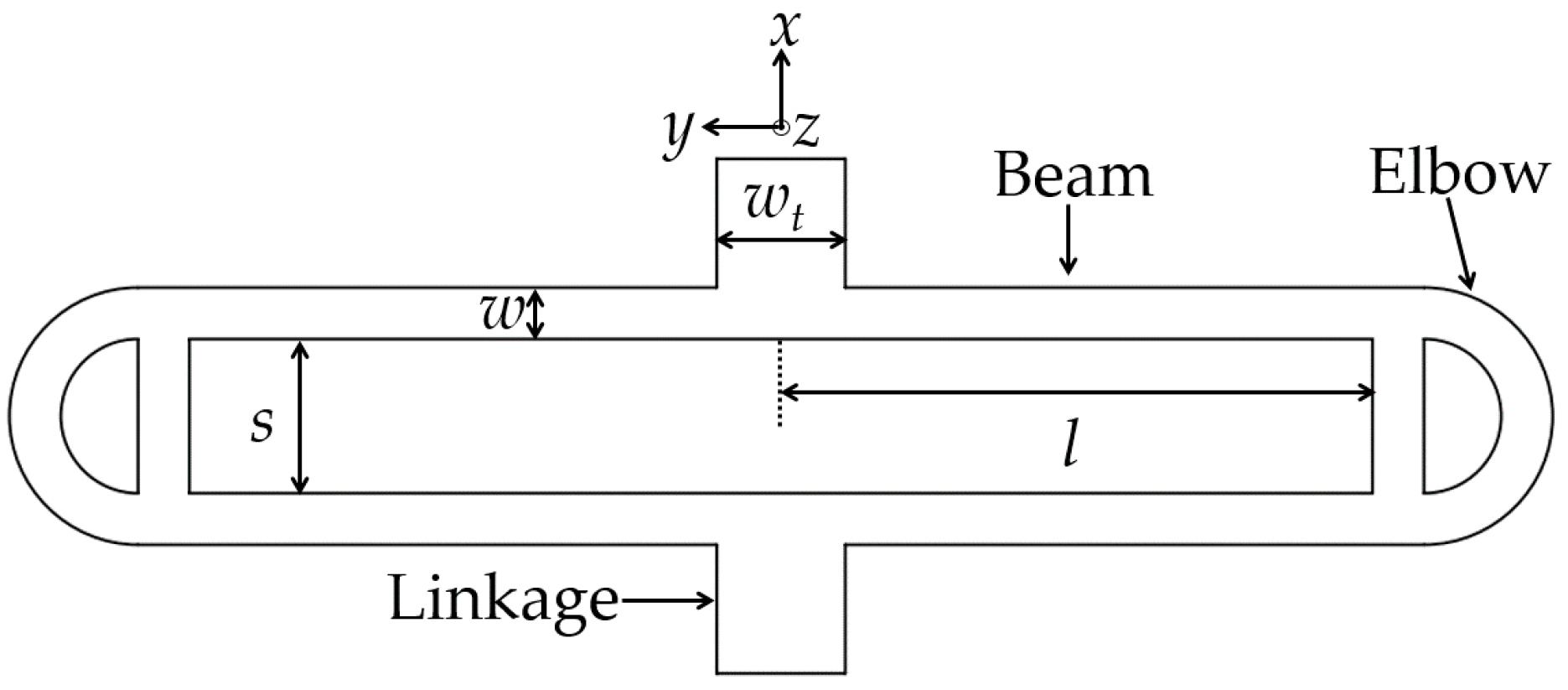
| w | Width of springs | 42 μm |
| l | Length of springs | 8 mm |
| ws | Linkage width | 100 μm |
| Wframe | Width of the intermediate frames | 100 μm |
| n | Number of springs | 6 |
| n−1 | Number of intermediate frames | 5 |
| k | Spring constant | 2.9 N/m |
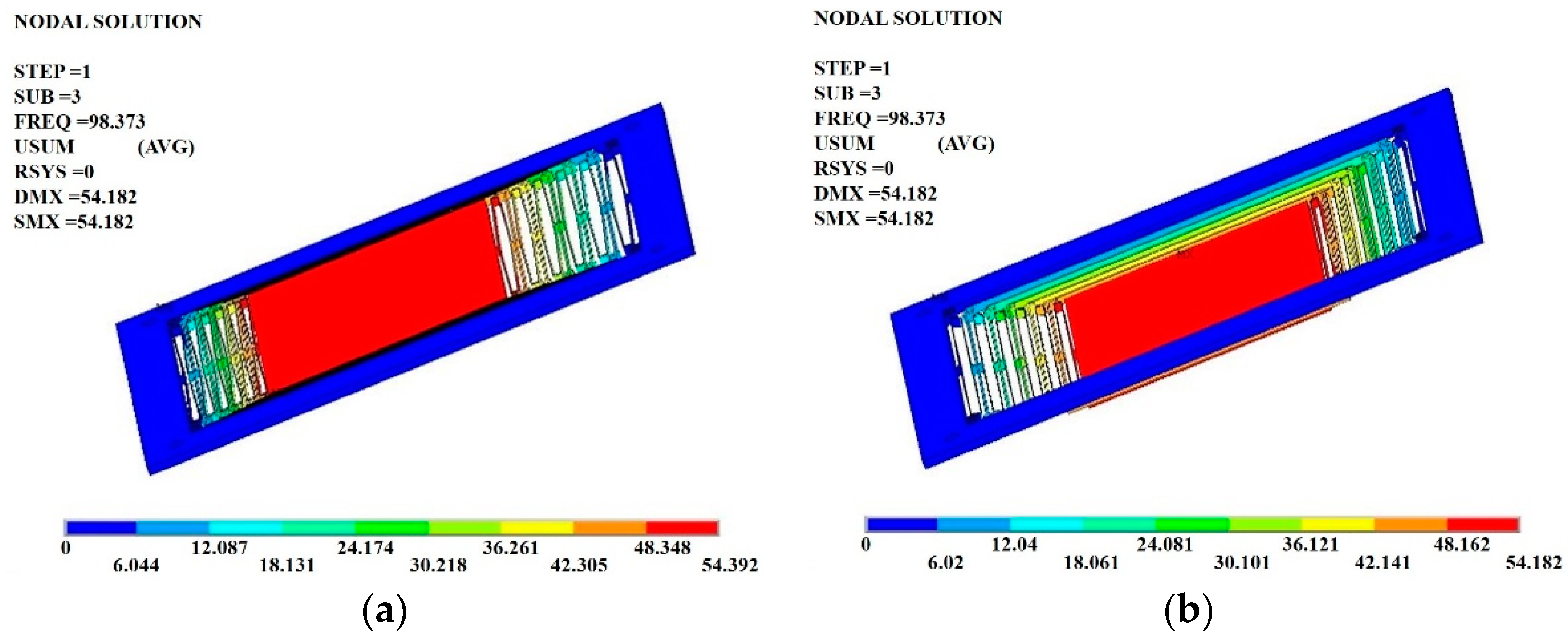
| fr | Resonant frequency | 15.2 Hz |
| d | Distance between the proof mass and top cap | 20 μm |
| Lelementary | Length of elementary electrodes | 5.5 mm |
| Welementary | Width of elementary electrodes | 1 mm |
| Larray | Length of single array electrode | 100 μm |
| Warray | Width of single array electrode | 3 mm |
| narray | Number of array electrodes on proof mass | 45 |
© 2016 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Z.; Wu, W.J.; Zheng, P.P.; Liu, J.Q.; Fan, J.; Tu, L.C. Novel Capacitive Sensing System Design of a Microelectromechanical Systems Accelerometer for Gravity Measurement Applications. Micromachines 2016, 7, 167. https://doi.org/10.3390/mi7090167
Li Z, Wu WJ, Zheng PP, Liu JQ, Fan J, Tu LC. Novel Capacitive Sensing System Design of a Microelectromechanical Systems Accelerometer for Gravity Measurement Applications. Micromachines. 2016; 7(9):167. https://doi.org/10.3390/mi7090167
Chicago/Turabian StyleLi, Zhu, Wen Jie Wu, Pan Pan Zheng, Jin Quan Liu, Ji Fan, and Liang Cheng Tu. 2016. "Novel Capacitive Sensing System Design of a Microelectromechanical Systems Accelerometer for Gravity Measurement Applications" Micromachines 7, no. 9: 167. https://doi.org/10.3390/mi7090167