
Miniature Ultrasonic Spatial Localization Module in the Lightweight Interactive


Abstract
:1. Introduction
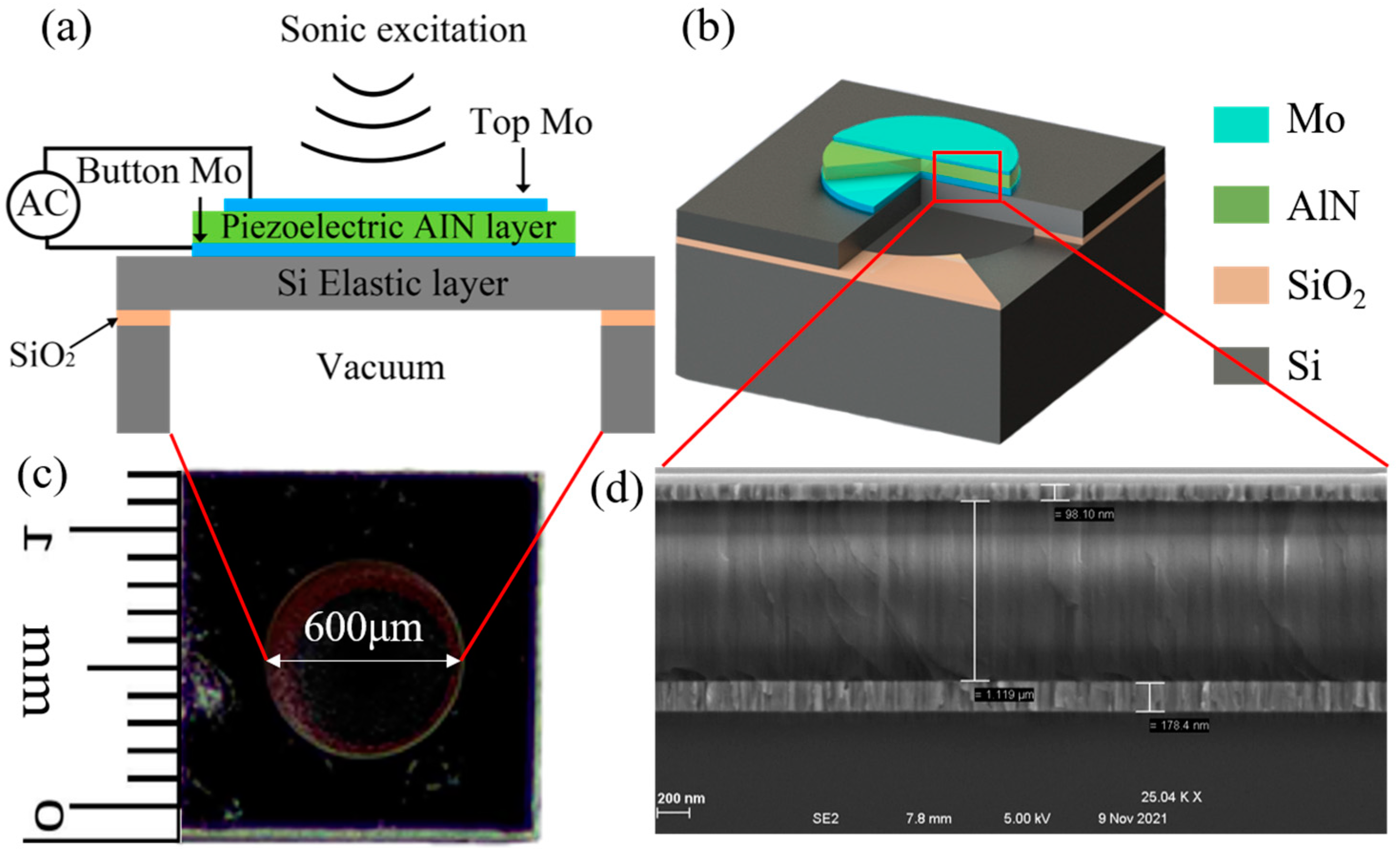
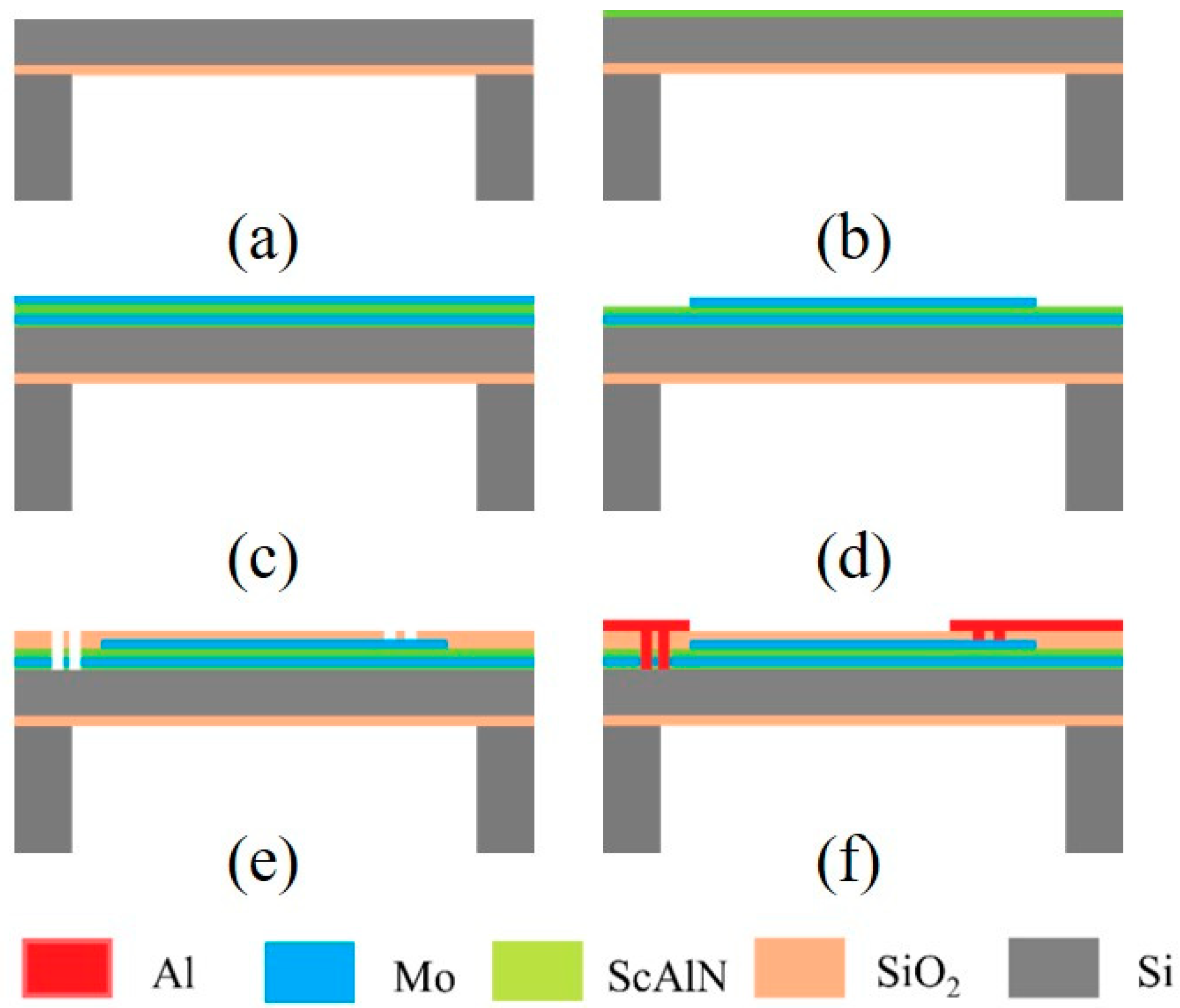
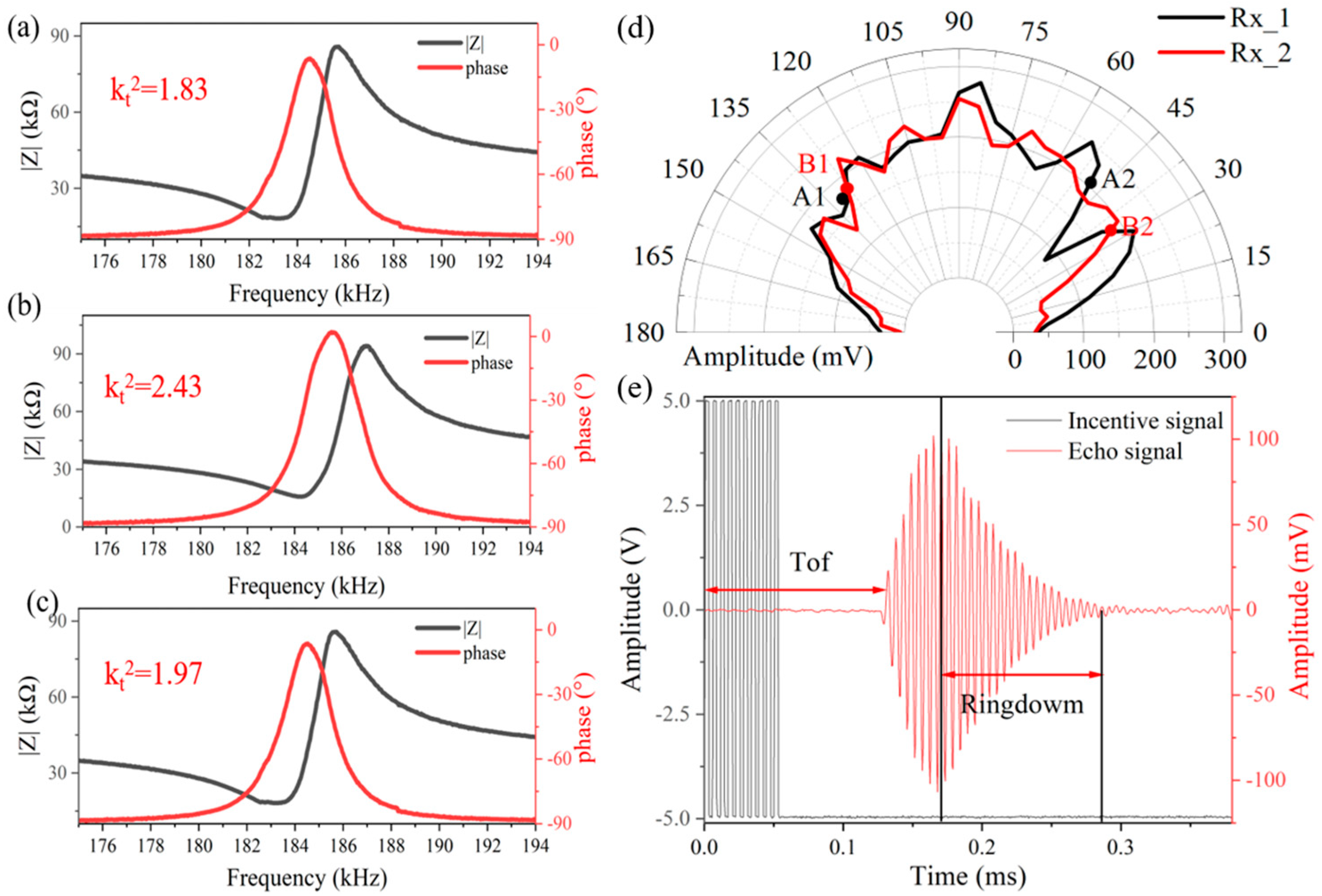
2. Structure and Characterization of PMUT
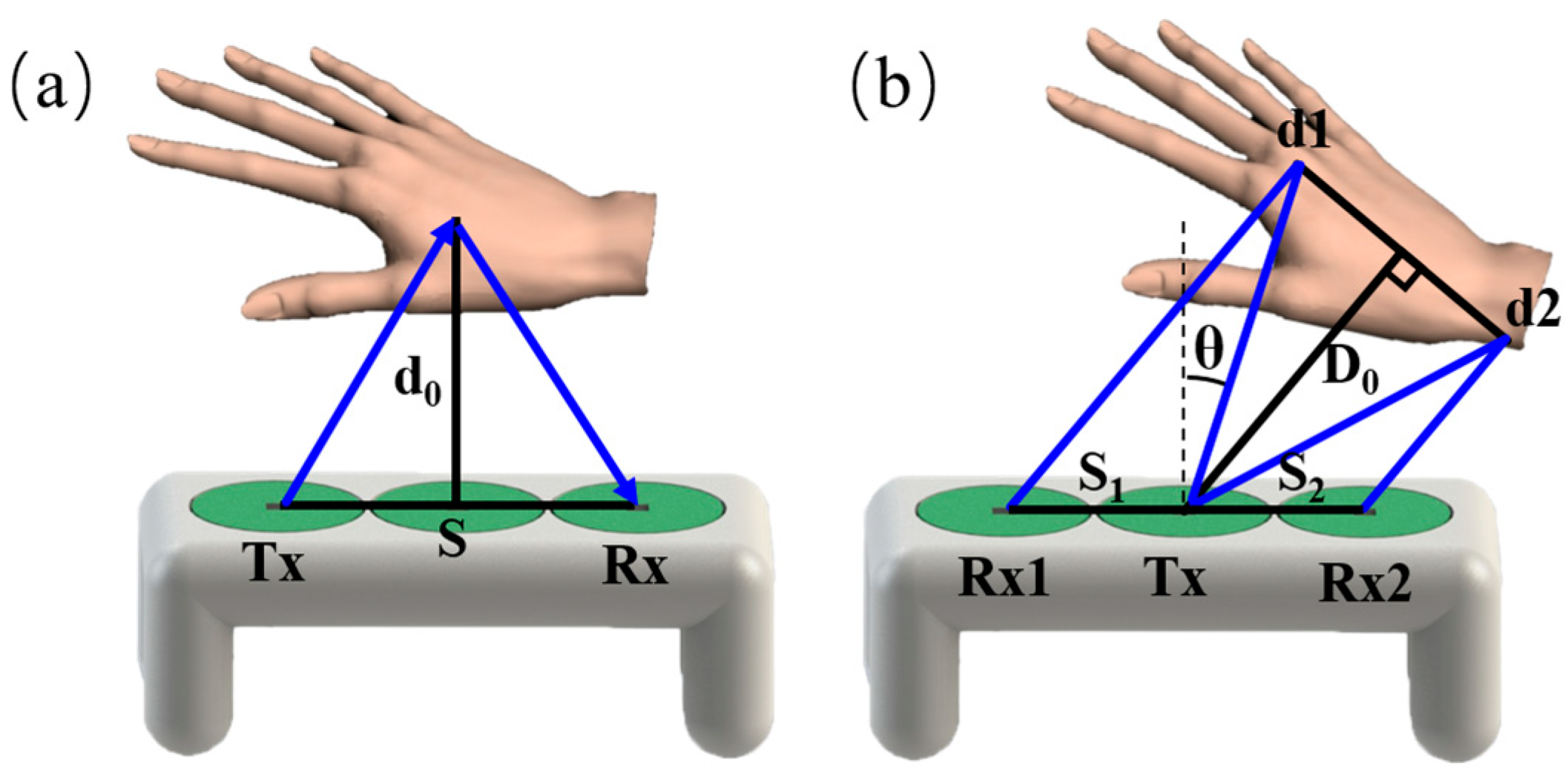
3. System Principle
4. Experiments
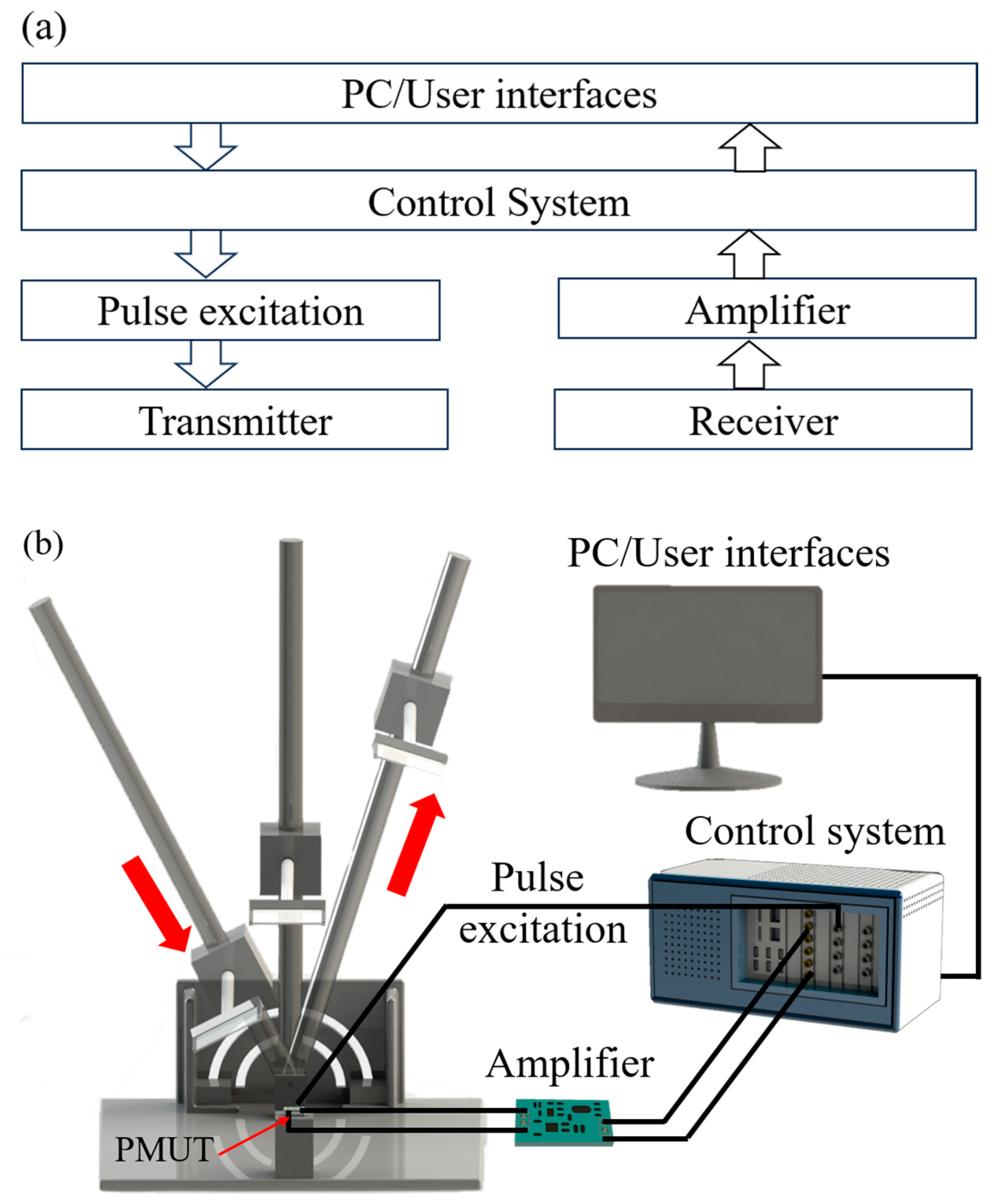
4.1. Space Positioning System
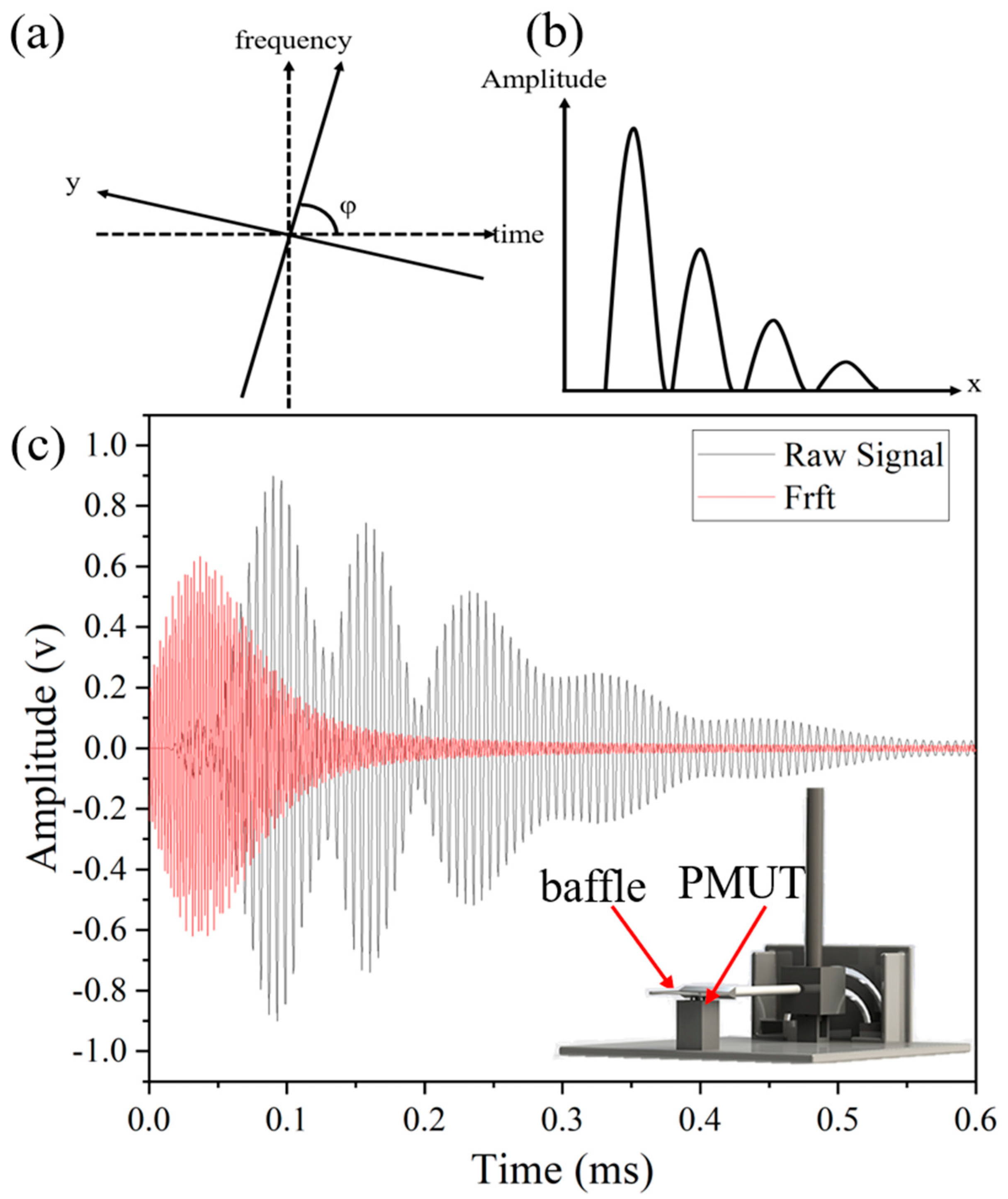
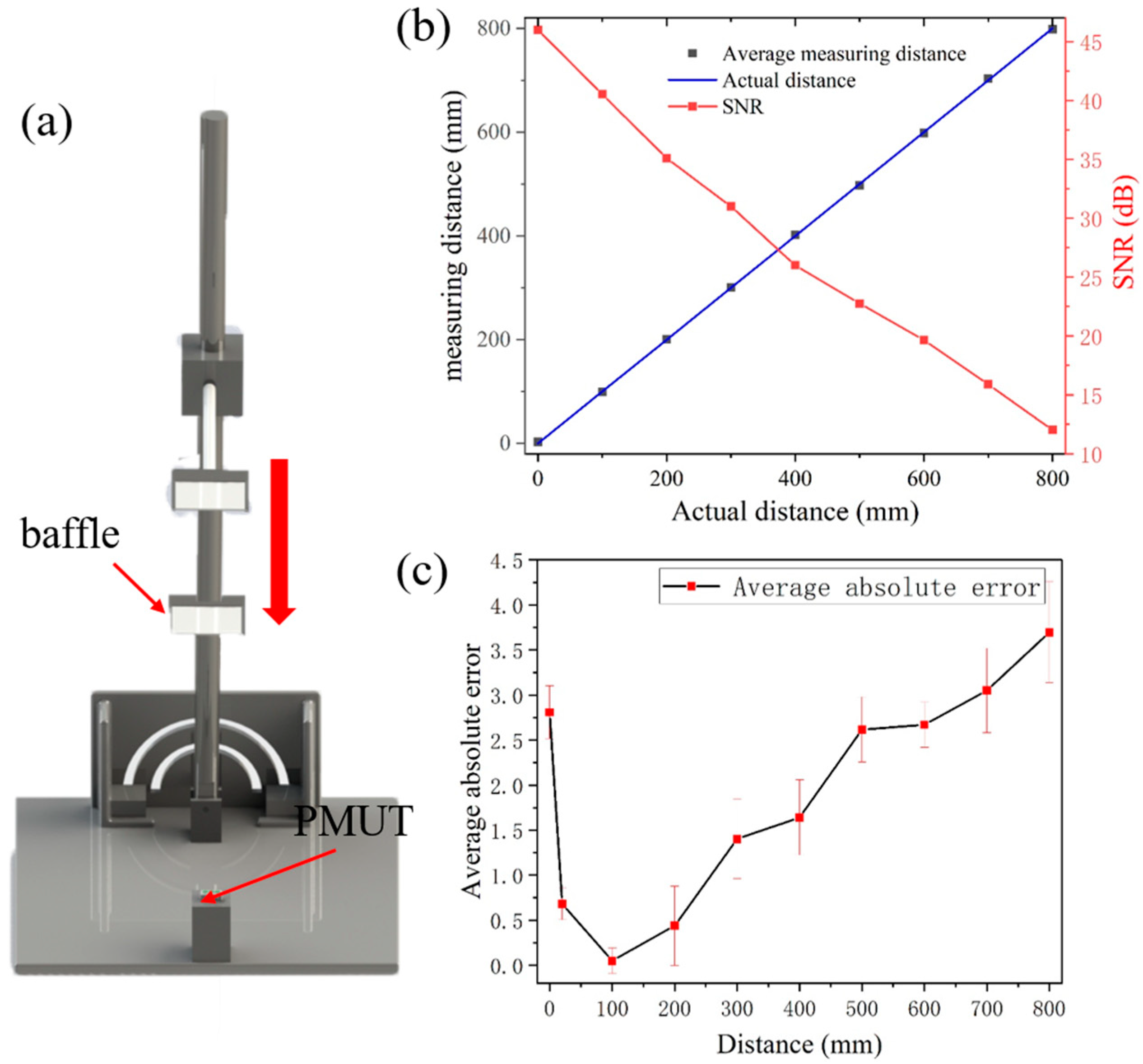
4.2. Distance Information
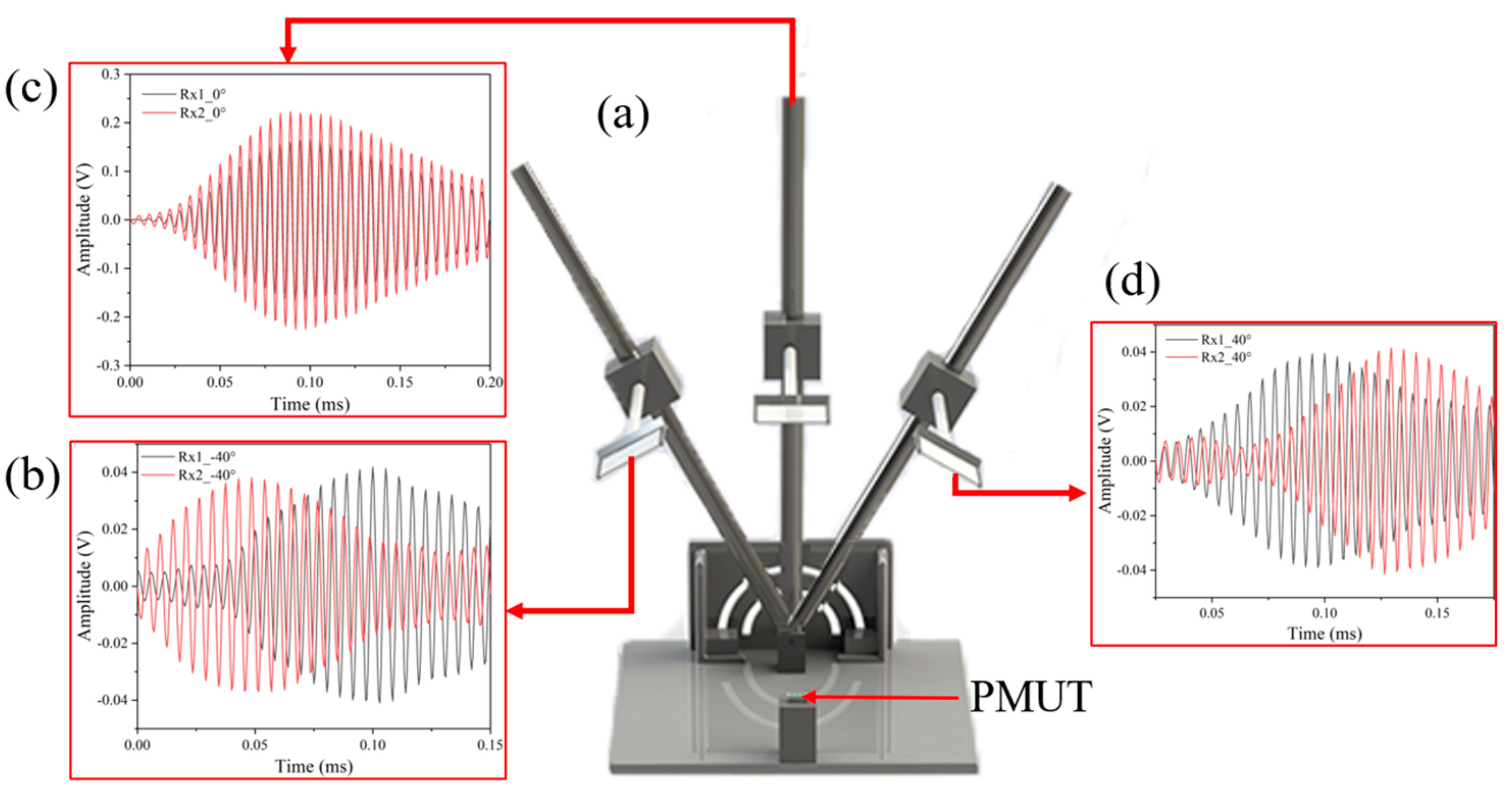
4.3. Direction Information
4.4. Angle Information
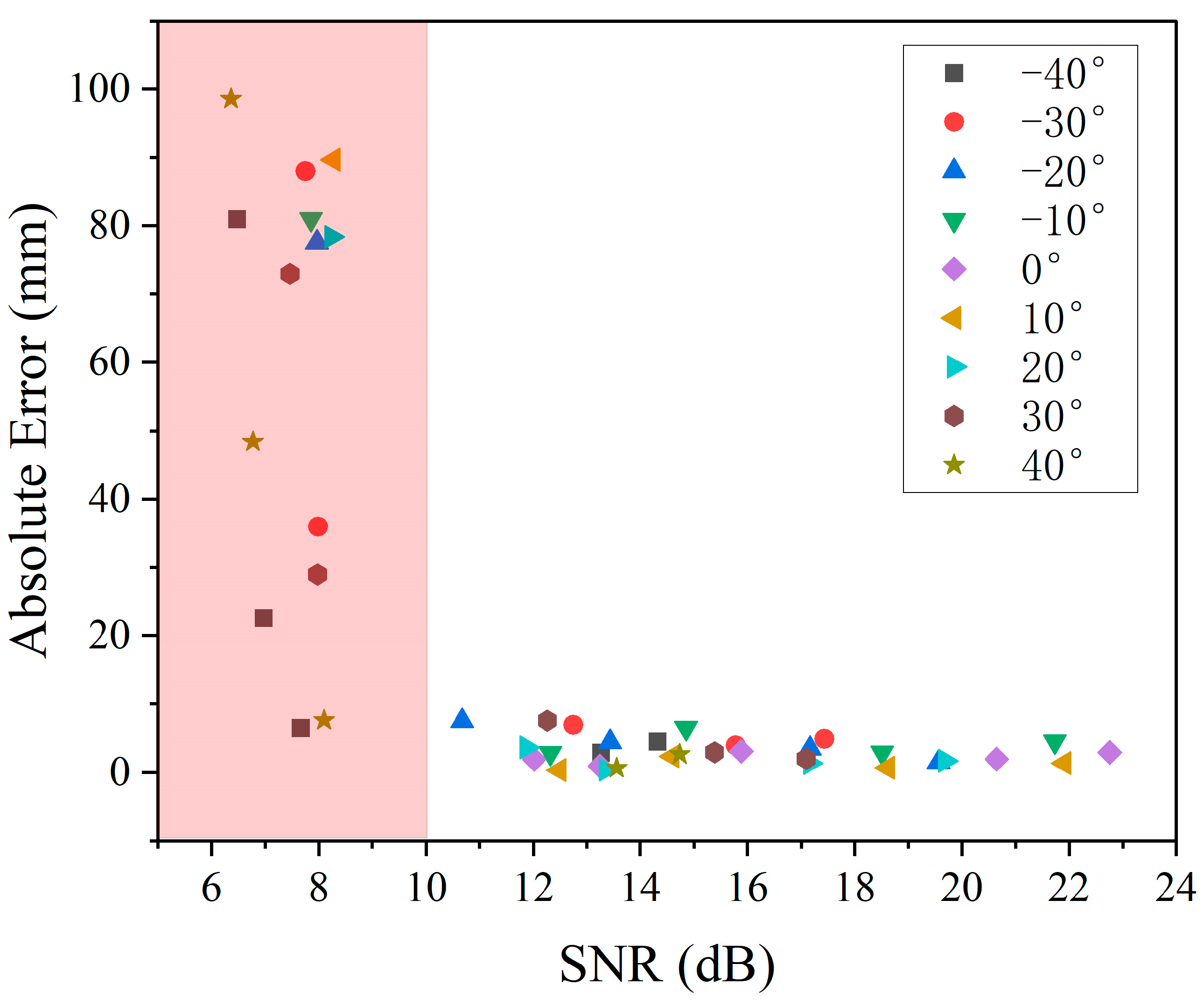
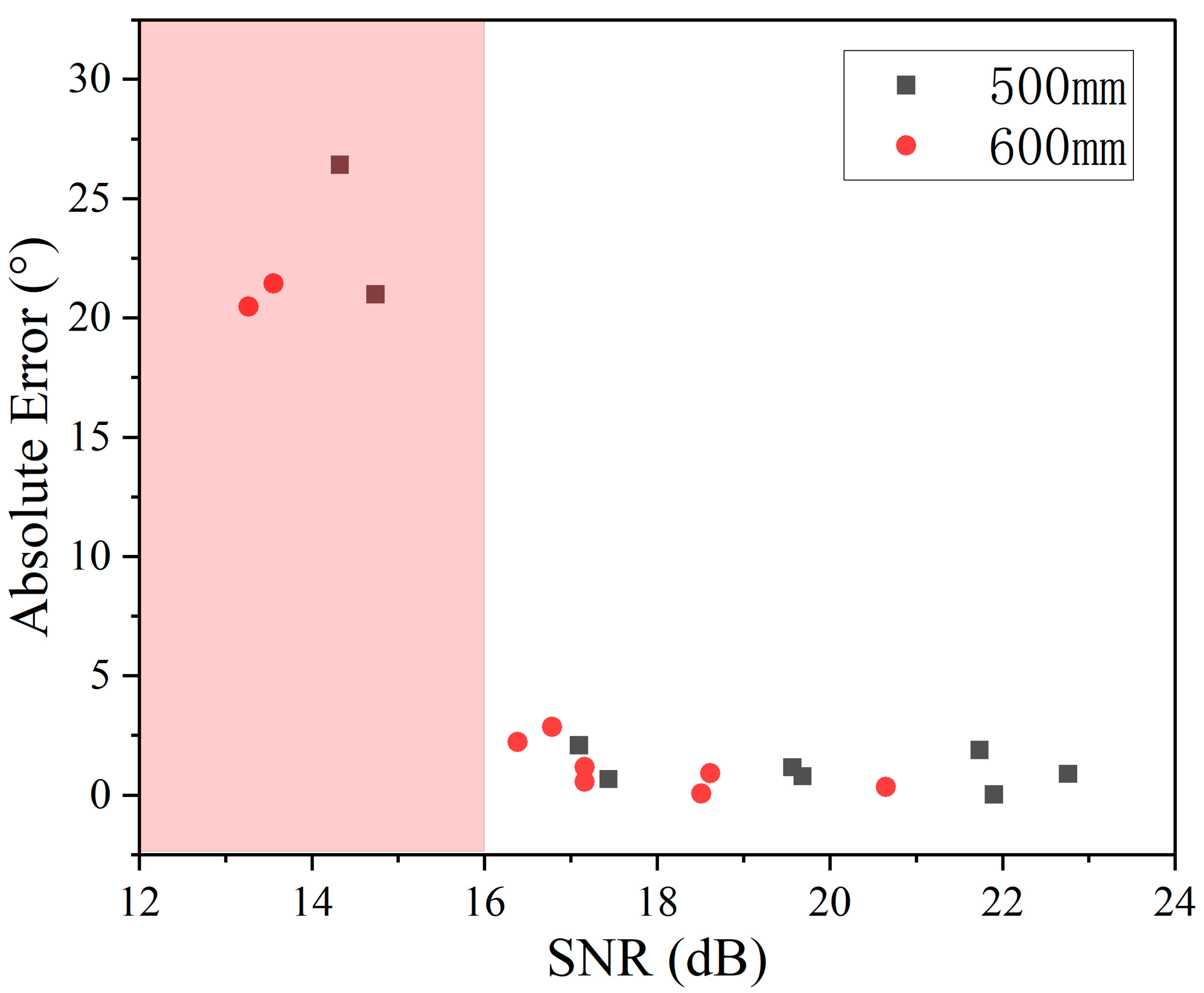
5. Error Analysis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rehg, J.M.; Kanade, T. Visual Tracking of High DOF Articulated Structures: An Application to Human Hand Tracking; Lecture Notes in Computer Science; Eklundh, J.-O., Ed.; Springer: Berlin/Heidelberg, Germany, 1994; Volume 801, pp. 35–46. [Google Scholar]
- Rehg, J.M.; Kanade, T. Model-based tracking of self-occluding articulated objects. In Proceedings of the IEEE International Conference on Computer Vision, Cambridge, MA, USA, 20–23 June 1995; pp. 612–617. [Google Scholar]
- Zhu, M.; He, T.; Lee, C. Technologies toward next generation human machine interfaces: From machine learning enhanced tactile sensing to neuromorphic sensory systems. Appl. Phys. Rev. 2020, 7, 031305. [Google Scholar] [CrossRef]
- Przybyla, R.J.; Shelton, S.E.; Guedes, A.; Izyumin, I.I.; Kline, M.H.; Horsley, D.A.; Boser, B.E. In-Air Rangefinding with an AlN Piezoelectric Micromachined Ultrasound Transducer. IEEE Sens. J. 2011, 11, 2690–2697. [Google Scholar] [CrossRef]
- Hussein, A.; Marín-Plaza, P.; Martín, D.; de la Escalera, A.; Armingol, J.M. Autonomous off-road navigation using stereo-vision and laser-rangefinder fusion for outdoor obstacles detection. In 2016 IEEE Intelligent Vehicles Symposium (IV); IEEE: Piscataway, NJ, USA, 2016; pp. 104–109. [Google Scholar]
- Wu, J.; Wu, T. A Bright New World of Ferroelectrics: Magic of Spontaneous Polarization. ACS Appl. Mater. Interfaces 2020, 12, 52231–52233. [Google Scholar] [CrossRef] [PubMed]
- Chiu, Y.; Wang, C.; Gong, D.; Li, N.; Ma, S.; Jin, Y. A Novel Ultrasonic TOF Ranging System Using AlN Based PMUTs. Micromachines 2021, 12, 284. [Google Scholar] [CrossRef]
- Cai, X.; Lai, L.; Zhou, L.; Shen, Z. Durable Freestanding Hierarchical Porous Electrode for Rechargeable Zinc–Air Batteries. ACS Appl. Energy Mater. 2019, 2, 1505–1516. [Google Scholar] [CrossRef]
- Kuratli, C.; Huang, Q. A CMOS ultrasound range-finder microsystem. IEEE J. Solid-State Circuits 2000, 35, 2005–2017. [Google Scholar] [CrossRef]
- Zhu, K.; Chen, X.; Qu, M.; Yang, D.; Hu, L.; Xie, J. Non-Contact Ultrasonic Flow Measurement for Small Pipes Based on AlN Piezoelectric Micromachined Ultrasonic Transducer Arrays. J. Microelectromec. Syst. 2021, 30, 480–487. [Google Scholar] [CrossRef]
- Akhbari, S.; Sammoura, F.; Eovino, B.; Yang, C.; Lin, L. Bimorph Piezoelectric Micromachined Ultrasonic Transducers. J. Microelectromec. Syst. 2016, 25, 326–336. [Google Scholar] [CrossRef]
- Chen, X.; Liu, C.; Yang, D.; Liu, X.; Hu, L.; Xie, J. Highly Accurate Airflow Volumetric Flowmeters via pMUTs Arrays Based on Transit Time. J. Microelectromec. Syst. 2019, 28, 707–716. [Google Scholar] [CrossRef]
- Jäger, A.; Großkurth, D.; Rutsch, M.; Unger, A.; Golinske, R.; Wang, H.; Dixon, S.; Hofmann, K.; Kupnik, M. Air-coupled 40-kHz ultrasonic 2D-phased array based on a 3D-printed waveguide structure. In Proceedings of the 2017 IEEE International Ultrasonics Symposium (IUS), Washington, DC, USA, 6–9 September 2017. [Google Scholar]
- Roy, K.; Lee, J.E.-Y.; Lee, C. Thin-film PMUTs: A review of over 40 years of research. Microsyst. Nanoeng. 2023, 9, 95. [Google Scholar] [CrossRef]
- Chang, Y.; Wei, J.; Lee, C. Metamaterials—From fundamentals and MEMS tuning mechanisms to applications. Nanophotonics 2020, 9, 3049–3070. [Google Scholar] [CrossRef]
- Cai, X.; Lai, L.; Shen, Z.; Lin, J. Graphene and graphene-based composites as Li-ion battery electrode materials and their application in full cells. J. Mater. Chem. A 2017, 5, 15423–15446. [Google Scholar] [CrossRef]
- Ahmed, S.; Yi, J. Two-Dimensional Transition Metal Chalcogenides and Their Charge Carrier Mobilities in Field-Effect Transistors. Nano-Micro Lett. 2017, 9, 50. [Google Scholar] [CrossRef] [PubMed]
- Li, F.; Yu, W.; Guan, X.; Wu, T. Emerging Transistor Applications Enabled by Halide Perovskites. Acc. Mater. Res. 2022, 3, 8–20. [Google Scholar] [CrossRef]
- Wang, Y.; Li, S.; Yi, J. Electronic and magnetic properties of Co doped MoS2 monolayer. Sci. Rep. 2016, 6, 24153. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Z.; Yoshida, S.; Tanaka, S. Epitaxial PMnN-PZT/Si MEMS ultrasonic rangefinder with 2m range at 1V drive. Sens. Actuators Phys. 2017, 266, 352–360. [Google Scholar] [CrossRef]
- Przybyla, R.; Izyumin, I.; Kline, M.; Boser, B.; Shelton, S.; Guedes, A.; Horsley, D. An ultrasonic rangefinder based on an AlN piezoelectric micromachined ultrasound transducer. In 2010 IEEE Sensors; IEEE: Piscataway, NJ, USA, 2010; pp. 2417–2421. [Google Scholar]
- Luo, G.-L.; Kusano, Y.; Roberto, M.N.; Horsley, D.A. High-Pressure Output 40 kHz Air-Coupled Piezoelectric Micromachined Ultrasonic Transducers. In Proceedings of the 2019 IEEE 32nd International Conference on Micro Electro Mechanical Systems (MEMS), Seoul, Republic of Korea, 27–31 January 2019; pp. 787–790. [Google Scholar]
- Naba, A.; Khoironi, M.F.; Santjojo, D.D.H. Low cost but accurate ultrasonic distance measurement using combined method of threshold-correlation. In Proceedings of the 2015 International Conference on Quality in Research (QiR), Lombok, Indonesia, 10–13 August 2015; pp. 23–25. [Google Scholar]
- Przybyla, R.J.; Tang, H.-Y.; Guedes, A.; Shelton, S.E.; Horsley, D.A.; Boser, B.E. 3D Ultrasonic Rangefinder on a Chip. IEEE J. Solid-State Circuits 2015, 50, 320–334. [Google Scholar] [CrossRef]
- Shao, Z.; Pala, S.; Peng, Y.; Lin, L. Bimorph Pinned Piezoelectric Micromachined Ultrasonic Transducers for Space Imaging Applications. J. Microelectromec. Syst. 2021, 30, 650–658. [Google Scholar] [CrossRef]
- Tong, Z.; Hu, H.; Wu, Z.; Xie, S.; Chen, G.; Zhang, S.; Lou, L.; Liu, H. An Ultrasonic Proximity Sensing Skin for Robot Safety Control by Using Piezoelectric Micromachined Ultrasonic Transducers (PMUTs). IEEE Sens. J. 2022, 22, 17351–17361. [Google Scholar] [CrossRef]
- Shi, Q.; Wang, T.; Lee, C. MEMS Based Broadband Piezoelectric Ultrasonic Energy Harvester (PUEH) for Enabling Self-Powered Implantable Biomedical Devices. Sci. Rep. 2016, 6, 24946. [Google Scholar] [CrossRef]
- Shi, Q.; Wang, H.; Wang, T.; Lee, C. Self-powered liquid triboelectric microfluidic sensor for pressure sensing and finger motion monitoring applications. Nano Energy 2016, 30, 450–459. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Q.; Zhao, X.; Liu, H.; Zhang, S.; Gu, Y. Ultra-wide band and improved quality factor SH-type SAW devices by employing Mn-doped Pb(In1/2Nb1/2) O3–Pb(Mg1/3Nb2/3)O3–PbTiO3 thin film/diamond layered structure. Diam. Relat. Mater. 2022, 130, 109478. [Google Scholar] [CrossRef]
- Namias, V. The Fractional Order Fourier Transform and Its Application to Quantum Mechanics. IMA J. Appl. Math. 1980, 25, 241–265. [Google Scholar] [CrossRef]
- McBride, A.C.; Kerr, F.H. On Namias’s Fractional Fourier Transforms. IMA J. Appl. Math. 1987, 39, 159–175. [Google Scholar] [CrossRef]
- Capus, C.; Brown, K. Short-time fractional Fourier methods for the time-frequency representation of chirp signals. J. Acoust. Soc. Am. 2003, 113, 3253–3263. [Google Scholar] [CrossRef] [PubMed]
- Lohmann, A.W. Image rotation, Wigner rotation, and the fractional Fourier transform. J. Opt. Soc. Am. A 1993, 10, 2181–2186. [Google Scholar] [CrossRef]
- Ozaktas, H.M.; Barshan, B.; Mendlovic, D.; Onural, L. Convolution, filtering, and multiplexing in fractional Fourier domains and their relation to chirp and wavelet transforms. J. Opt. Soc. Am. A 1994, 11, 547–559. [Google Scholar] [CrossRef]
- Almeida, L.B. The fractional Fourier transform and time-frequency representations. IEEE Trans. Signal Process. 1994, 42, 3084–3091. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, J.; Li, D.; Wu, P.; Zhang, J.; Dou, H.; Zhang, M.; Yang, X.; Zhang, L.; Mu, X. Airborne Rangefinding With pMUTs Array Using Differential Structure. IEEE Sens. J. 2023, 23, 22240–22247. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actual (mm) | Absolute Error of Measured Distance (mm) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| −40° | −30° | −20° | −10° | 0° | 10° | 20° | 30° | 40° | |
| 100 | −1.673 | −2.116 | −2.426 | −1.868 | −0.496 | −2.239 | −0.276 | 0.374 | −0.134 |
| 200 | −0.425 | −1.811 | −2.256 | −2.018 | 1.049 | −1.392 | −0.199 | 1.186 | 2.717 |
| 300 | 0.526 | −1.374 | −0.632 | −0.107 | 0.566 | −0.774 | −0.272 | 1.124 | 2.669 |
| 400 | 0.498 | 0.093 | 0.530 | 0.857 | 2.123 | 1.384 | 1.689 | 4.092 | 5.644 |
| 500 | −4.52 | −4.924 | −1.491 | −1.166 | −2.899 | 1.360 | 1.668 | 1.975 | 2.63 |
| 600 | 2.87 | −3.937 | −3.505 | −3.182 | −1.916 | −0.656 | −1.346 | −2.937 | 0.62 |
| 700 | 16.46 | 6.953 | 4.482 | 5.805 | 3.071 | 2.332 | −0.351 | 7.553 | 17.61 |
| 750 | −22.53 | −35.94 | 7.478 | 2.801 | −0.933 | 0.328 | 3.638 | −28.94 | −48.38 |
| 800 | −80.93 | −87.94 | −77.52 | −90.19 | −1.937 | −89.67 | −78.36 | −72.95 | −98.59 |
| Actual (mm) | Absolute Error of Measured Angle (°) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| −40° | −30° | −20° | −10° | 0° | 10° | 20° | 30° | 40° | |
| 100 | −1.273 | 0.018 | −1.185 | −0.361 | −0.060 | 0.782 | 0.223 | 0.984 | −0.424 |
| 200 | 1.734 | −0.613 | −0.127 | 0.093 | 0.871 | 0.107 | 0.969 | 1.649 | −0.722 |
| 300 | −0.186 | −0.992 | 0.411 | 0.070 | −0.440 | 0.779 | 0.754 | 1.147 | 0.645 |
| 400 | −0.064 | −2.871 | −0.668 | 0.039 | −0.904 | 0.434 | 0.677 | 1.545 | 1.372 |
| 500 | 26.420 | −0.668 | −1.165 | −1.891 | −0.885 | −0.025 | 0.785 | 2.086 | −20.990 |
| 600 | 20.477 | −2.847 | −0.566 | 0.052 | −0.339 | 0.906 | 1.175 | 2.223 | −21.445 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.; Xiu, X.; Lyu, H.; Yang, H.; Safari, A.; Zhang, S. Miniature Ultrasonic Spatial Localization Module in the Lightweight Interactive. Micromachines 2024, 15, 71. https://doi.org/10.3390/mi15010071
Li L, Xiu X, Lyu H, Yang H, Safari A, Zhang S. Miniature Ultrasonic Spatial Localization Module in the Lightweight Interactive. Micromachines. 2024; 15(1):71. https://doi.org/10.3390/mi15010071
Chicago/Turabian StyleLi, Lieguang, Xueying Xiu, Haochen Lyu, Haolin Yang, Ahmad Safari, and Songsong Zhang. 2024. "Miniature Ultrasonic Spatial Localization Module in the Lightweight Interactive" Micromachines 15, no. 1: 71. https://doi.org/10.3390/mi15010071